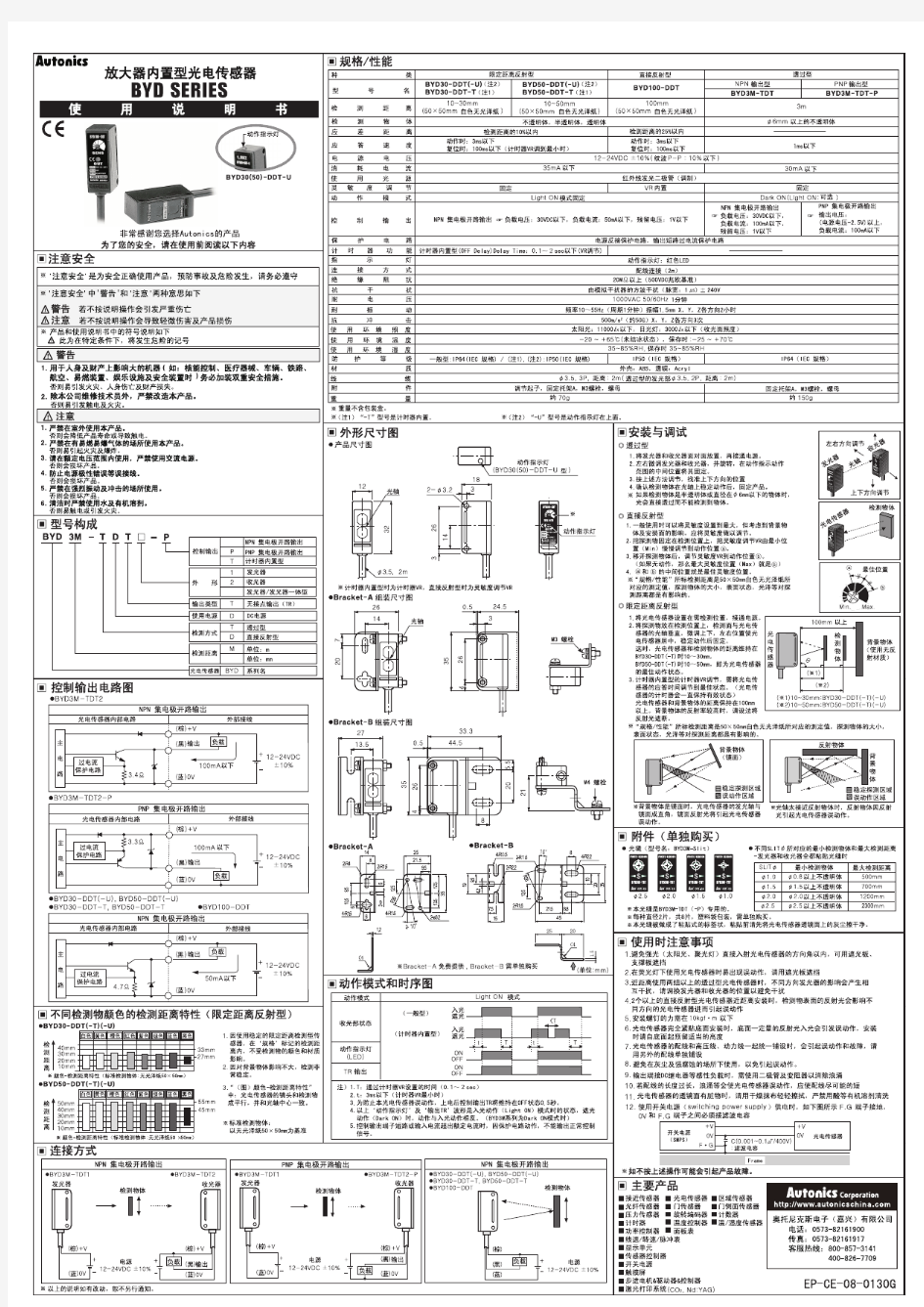
奥托尼克斯放大器内置型光电传感器使用说明书
光电开关说明书
光电开关说明书 ①漫反射式光电开关:它是一种集发射器和接收器于一体的传感器,当有被检测物体经过时,物体将光电开关发射器发射的足够量的光线反射到接收器,于是光电开关就产生了开关信号。当被检测物体的表面光亮或其反光率极高时,漫反射式的光电开关是首选的检测模式。 ②镜反射式光电开关:它亦集发射器与接收器于一体,光电开关发射器发出的光线经过反射镜反射回接收器,当被检测物体经过且完全阻断光线时,光电开关就产生了检测开关信号。 ③对射式光电开关:它包含了在结构上相互分离且光轴相对放置的发射器和接收器,发射器发出的光线直接进入接收器,当被检测物体经过发射器和接收器之间且阻断光线时,光电开关就产生了开关信号。当检测物体为不透明时,对射式光电开关是最可*的检测装置。 ④槽式光电开关:它通常采用标准的U字型结构,其发射器和接收器分别位于U型槽的两边,并形成一光轴,当被检测物体经过U型槽且阻断光轴时,光电开关就产生了开关量信
号。槽式光电开关比较适合检测高速运动的物体,并且它能分辨透明与半透明物体,使用安全可*。 ⑤光纤式光电开关:它采用塑料或玻璃光纤传感器来引导光线,可以对距离远的被检测物体进行检测。通常光纤传感器分为对射式和漫反射式。 它们的工作光线示意图如图3所示。 (2)术语解释 常见的术语示意图如图4所示。 ①检测距离:是指检测体按一定方式移动,当开关动作时测得的基准位置(光电开关的感应表面)到检测面的空间距离。额定动作距离指接近开关动作距离的标称值。 ②回差距离:动作距离与复位距离之间的绝对值。 ③响应频率:在规定的1s的时间间隔内,允许光电开关动作循环的次数。 ④输出状态:分常开和常闭。当无检测物体时,常开型的光电开关所接通的负载由于光电开关内部的输出晶体管的截止而不工作,当检测到物体时,晶体管导通,负载得电工作。 ⑤检测方式:根据光电开关在检测物体时发射器所发出的光线被折回到接收器的途径的不同,可分为漫反射式、镜反射式、对射式等。 ⑥输出形式:分NPN二线、NPN三线、NPN四线、PNP二线、PNP三线、PNP四线、AC 二线、AC五线(自带继电器),及直流NPN/PNP/常开/常闭多功能等几种常用的输出形式。
伺服故障报警及处理方法
伺服故障报警及处理方法 电压过低电源电压太低。MR-E-□A:160V 以下 存储器异常1 RAM存储器异常 时钟异常印刷电路板的异常 存储器异常2 EEP-ROM异常 编码器异常1 编码器和伺服放大器之间通讯异常。 电路板异常2 CPU·零部件异常 存储器异 电机配合异常伺服放大器和伺服电机之间的配合有误。 编码器异常2 编码器和伺服放大器之间通讯异常。 主电路异常伺服放大器的伺服电机输出端(U·V·W相)接地故障。 再生制动异常制动电流超过内置再生制动电阻或再生制动选件的允许值。再生制动晶体管异常 超速转速超出了瞬时允许转速。 过流伺服放大器的输出电流超过了允许电流。 过压直流母线电压的输入在400V以上。 指令脉冲频率异常输入的指令脉冲的脉冲频率太高。 参数异常参数的设定值异常。 主电路芯子过热主电路异常过热。 伺服电机过热伺服电机的温度上升,热保护继电器动作。 过载 1 超过了伺服放大器的过载能力。负载率300%:以上负载率200%:100s以上 过载2 由于机械故障导致伺服放大器连续数秒钟以最大输出电流输出。伺服电机 的锁定时间:1s以上 误差过大偏差计数器的滞留脉冲超过编码器的分辨率×10[pulse]。
串行通讯超时RS-232C通讯的时间超过参数的设定值。 串行通讯异常伺服放大器和通讯设备(计算机等)之间出现串行通讯错误。CPU·部件异常 再生制动电流过大警告 可能会超出内置再生制动电阻或外部再生制动选件的制动 能力。 过载警告可能发生过载1,过载2报警。 伺服紧急停止警告EMG-SG之间断开。 主电路OFF警告 主电路电源断开时,伺服开启信号(SON)为ON。 伺服报警代码及处理 欠压 电源电压过低。MR-E-□A:160V 以下 <主要原因><处理方法>·电源电压太低。→检查电源系统 ·控制电源瞬间停电在60ms以上。→检查电源系统·由于电源容量过小,导致启动时电源电压下降。→检查电源系统·电源切断5秒以内在接通。→检查电源系统·伺服放大器内部故障。→更换伺服放大器存储器异常1、 时钟异常、 存储器异常2 AL.12:RAM异常 AL.13:印刷电路板异常 AL.15:EEPROM异常 <主要原因><处理方法> ·伺服放大器内部故障。→更换伺服放大器。
激光放大器使用说明
GDPH-270激光放大器使用说明 一、调整放大器设定值 放大器是检测PVC两板之间泡沿距离大小的一种传感器。如果设置不好,放大器将找不到两版之间的最大值,会导致冲裁初始化失败,也会导致冲裁步进的不准确,从而影响照相检测功能。一般情况下,只需要调整放大器设定值就可以满足要求,调整放大器设定值的方法如下。 设定放大器的数值可以通过手动把PVC片子慢慢的通过冲裁导板的检测区域观察放大器的数值变化,记住放大器数值的最大值,然后用最大值减去200-400就是我们需要设定的数值,然后把这个数值输入到放大器中就可以了。把数值输入到放大器的方法是:直接按住放大器的左右键入下图1-25所示。 图1-25 放大器设置 图中区域1为黄色数值是需要设置的数值,就是需要人为输入进去的数值。 区域2红色数字是所检测到的实际数值,区域3是放大器的左右键,即手动按钮,直接按下即可增大或减小设定数值。 一般情况下只需要调整设定值就可以满足现场要求,如果工艺改变,实际检测精度达不到要求,可以更改放大器的灵敏度,可以对放大器进行复位和初始化等操作,详细方法见本说明第二章。 二、激光传感器设置 -1-
第一章第7步介绍了调整放大器设定值的方法,如果实际检测精度达不到要求,可以更改放大器的灵敏度,2.1节为调整灵敏度方法。2.2节为初始化放大器的方法,如果需要复位,可参照2.3节的步骤。如果需要重设默认值,可以对放大器初始化。2.4节为激光传感器感测头安装要求。 2.1灵敏度设置 放大器灵敏度共分5档,下面再简单介绍一下如何设置放大器灵敏度。 第一步:按住“MODE”键3秒钟以上,如下图所示: 图2-1 灵敏度调整 第二步:按方向键,将出现几种模式,默认为“”模式,可根据所需灵敏度来选择不同的模式。例如,如果要求灵敏度较高,可选择“hsp”模式。 第三步:按“MODE ”键,显示“”,再按“MODE”键,显示“”,再按“MODE”键,出现数字,这样就完成了放大器的灵敏 -2-
富士伺服驱动器参数设定及基本操作技巧
4.2.1 第一阶段 连接伺服放大器及伺服电机,进行试运行。配线方法参照3 章。 在伺服电机的输出轴未连接到机械系统的状态下进行试运行。 在第一阶段确认以下项目。 <确认> ?确认伺服放大器的电源配线 (L1、L2、L3) ?确认伺服电机动力线 (U、V、W)、编码器电缆线 ?确认伺服放大器、伺服电机是否正常工作 ?确认参数4 号(旋转方向切换/CCW(逆时针)方向旋转时的相位切换)■试运行顺序 (1) 请固定伺服电机,以防其横向翻倒。 将伺服电机牢固固定 不要在电机的输出轴上安装任何东西 (2) 请按3 章的配线,为伺服放大器与伺服电机配线。 ※第一阶段进行单体试运行,故不要连接到CN1 上。 (3) 请确认4-2 页的「■初次通电前的注意事项」后,再通电。 i) 请确认充电用显示灯。 ii) 请确认触摸面板显示。 ※万一报警检出时,请切断电源,确认配线后,参照9 章。
请预习说明书的第4章和第8章。 5 参数 5.1 参数构成 伺服放大器中有调整机械系统的设定、伺服的特性与精度的各种参数。 由于参数的设定值被存储在可电换写的ROM (EEPROM) 中,因此,即使切断电源也不会丢失。 作为参数一览表的 "变更" 项目的 "电源" 的参数,即使切断主电源,再接通电源时仍然有效。(请确认主电源切断时,伺服放大器的触摸面板<7 段文字显示>灯灭。) 5.1.1 利用触摸面板编集的方法 5-2
5.2 参数一览表
5.3 参数说明 以每一命令脉冲的机械系统的移动量为单位量设定参数(电子齿轮)。利用以下计算式计算。
提示:当伺服电机旋转一周时的机械系统的移动量中有π时,355/113 可以近似。 输出脉冲数和命令脉冲补偿无关。根据参数19 号的设定值,电机轴正转时,输出B 相进给90°相位差2 路信号。 ※只在位置控制时有效。 可以选择输入脉冲串端子的信号形式。 可以设定伺服放大器的输入脉冲串端子 [CA]、[*CA]、[CB]、[*CB] 的脉冲串的形式。 最大输入频率在差动输入时为1.0 [MHz],在集电极开路输入时为200 [kHz]。 但是,请输入各种信号,以满足以下条件。 (信号CA、*CA、CB、*CB 各自条件相同) ■命令脉冲/命令符号(参数03 的设定值:0) 用命令脉冲表示旋转量,用命令符号表示旋转方向。 ?差动输入
之山伺服器说明书(ZS-C或ZS-Q)
目录 安全事项 (1) 第一章产品检查与型号说明 (3) 第二章安装 (4) 第三章信号和接线 (8) 第四章参数说明 (15) 第五章面板显示及操作 (25) 第六章运行 (28)
安全事项 欢迎您使用杭州之山科技有限公司生产的纺机专用伺服控制系统。 在产品存放、安装、配线、运行、检查或维修前,用户必需熟悉并遵守以下重要事项,以确保安全地使用本产品。 错误操作可能会引起危险并导致人身伤亡。 错误操作可能会引起危险,导致人身伤害,并可能使设备损坏。 严格禁止行为,否则会导致设备损坏或不能使用。 禁止将产品暴露在有水气、腐蚀性气体、可燃性气体的场合使用。否则会导致请将接地端子可靠接地,接地不良可能会造成触电或火灾。
当机械设备开始运转前,必须配合合适的参数设定值。若未调整到 当电机运转时,禁止接触任何旋转中的零件,否则会造成人员伤亡。 设备运行时,禁止触摸驱动器和电机,否则会造成触电或烫伤。 禁止接触驱动器及其电机内部,否则会造成触电。 电源启动时,禁止拆卸驱动器面板,否则会造成触电。 本手册所涉及产品为一般工业用途,请勿用于可能直接危害人身安全装置上,
第一章产品检查与型号说明 1.1 产品检查 为了防止本产品在购买与运输过程中的疏忽,请详细检查以下列出的项目: a. 是否是所欲购买的产品:分别检查电机与驱动器上的产品型号。 b. 电机轴是否运转平顺:用手分别逆时针和顺时针旋转电机转轴,如果可以平顺运转,代表电机转轴是正常的。 c. 外观是否有损伤:目视检查是否有外观上的任何损坏,是否有松脱的螺丝。 d. 检查是否有任何组件的缺失。 完整的伺服组件包括: 伺服驱动器及伺服电机 5PIN 电源进线接线端子(L、N、R、S、T) 3PIN UVW电机动力线接线端子(U、V、W) 3PIN 刹车电阻连接线(P、D、C) DB25 控制端子接线端子(公头) DB15 电机编码器接线端子(公头) 如果有任何以上的情形发生,请与我们联系以获得妥善解决。 1.2产品型号对照 1.2.1 伺服驱动器 1.2.2 伺服电机
运算放大器组成的各种实用电路
运算放大器组成的电路五花八门,令人眼花瞭乱,是模拟电路中学习的重点。在分析它的工作原理时倘没有抓住核心,往往令人头大。为此本人特搜罗天下运放电路之应用,来个“庖丁解牛”,希望各位从事电路板维修的同行,看完后有所斩获。 遍观所有模拟电子技朮的书籍和课程,在介绍运算放大器电路的时候,无非是先给电路来个定性,比如这是一个同向放大器,然后去推导它的输出与输入的关系,然后得出Vo=(1+Rf)Vi,那是一个反向放大器,然后得出Vo=-Rf*Vi……最后学生往往得出这样一个印象:记住公式就可以了!如果我们将电路稍稍变换一下,他们就找不着北了!偶曾经面试过至少100个以上的大专以上学历的电子专业应聘者,结果能将我给出的运算放大器电路分析得一点不错的没有超过10个人!其它专业毕业的更是可想而知了。 今天,芯片级维修教各位战无不胜的两招,这两招在所有运放电路的教材里都写得明白,就是“虚短”和“虚断”,不过要把它运用得出神入化,就要有较深厚的功底了。 虚短和虚断的概念 由于运放的电压放大倍数很大,一般通用型运算放大器的开环电压放大倍数都在80 dB以上。而运放的输出电压是有限的,一般在 10 V~14 V。因此运放的差模输入电压不足1 mV,两输入端近似等电位,相当于“短路”。开环电压放大倍数越大,两输入端的电位越接近相等。 “虚短”是指在分析运算放大器处于线性状态时,可把两输入端视为等电位,这一特性称为虚假短路,简称虚短。显然不能将两输入端真正短路。 由于运放的差模输入电阻很大,一般通用型运算放大器的输入电阻都在1MΩ以上。因此流入运放输入端的电流往往不足1uA,远小于输入端外电路的电流。故通常可把运放的两输入端视为开路,且输入电阻越大,两输入端越接近开路。“虚断”是指在分析运放处于线性状态时,可以把两输入端视为等效开路,这一特性称为虚假开路,简称虚断。显然不能将两输入端真正断路。 在分析运放电路工作原理时,首先请各位暂时忘掉什么同向放大、反向放大,什么加法器、减法器,什么差动输入……暂时忘掉那些输入输出关系的公式……这些东东只会干扰你,让你更糊涂﹔也请各位暂时不要理会输入偏置电流、共模抑制比、失调电压等电路参数,这是设计者要考虑的事情。我们理解的就是理想放大器(其实在维修中和大多数设计过程中,把实际放大器当做理想放大器来分析也不会有问题)。 好了,让我们抓过两把“板斧”------“虚短”和“虚断”,开始“庖丁解牛”了。 (原文件名:1.jpg)
干线放大器使用说明书
移动通信干线放大器 使用说明书 2008年9月
目录 前 言 (3) 第一章 产品介绍 (4) 1.1概述 (4) 1.2设备的主要特点 (4) 1.3设备工作原理 (4) 第二章 主要技术性能和技术条件 (5) 2.1主要技术性能指标 (5) 2.2通用技术条件 (6) 第三章 设备开通 (7) 3.1设备安装前的准备工作 (7) 3.2设备安装与开通步骤 (7) 3.3设备安装与开通注意事项 (10) 3.4设备与附件 (11) 第四章 系统的维护与保养 (12) 4.1系统维护 (12) 4.2系统保养 (12) 第五章 安全使用注意事项 (13) 第六章 附 则 (14)
前 言 版权所有,侵权必究。 本公司对本手册保留一切权利。任何单位和个人,未经公司的书面许可,不得擅自摘抄、复制本手册(包括电子版本)的部分或全部,并不得以任何形式进行传播。 本手册仅供参考,如有改动恕不另行通知。 本使用说明书主要介绍的是移动通信干线放大器的安装、使用和维护方法,用户在安装和使用 该设备之前,请认真阅读本手册。 一、设备安全使用要则 1.MS、BS射频信号接口严禁空载。连接或断开电缆前必须先切断设备电源。 2.注意防护信号接口,防止撞坏接头;同时防止杂物、灰尘落入。 3.非专业维护人员,不得随意拆开设备,以免损坏设备。 4.维护设备时,应采取静电防护措施。 5.注意对雷电和电源浪涌的防护,电源要有必要的防雷设施,不要将设备和大功率用电器安装在同一电源支路上。 二、参考技术规范 1.3GPP TS25.105 《UTRA (BS) TDD: Radio transmission and reception》 2.GB/T2423.1-2001《电工电子产品基本环境试验规程 试验A:低温试验方法》 3.GB/T2423.2-2001《电工电子产品基本环境试验规程 试验B:高温试验方法》 4.《GSM数字蜂窝移动通信网干线放大器技术要求和测试方法》 5.GB15842-1995《移动通信设备安全要求和试验方法》 6.《900MHz1800MHz GSM直放站技术要求和测试方法》 7.《GSM直放站测试规范(监控协议联通GSM1.0)》 8.《中国移动直放站监控系统功能规范1.0.0》
三菱伺服放大器内部故障处理方法
三菱伺服放大器内部故障处理方法(仅供参考) AL.10 欠压 电源电压过低。MR-E-□A:160V 以下 <主要原因><处理方法> ·电源电压太低。→检查电源系统 ·控制电源瞬间停电在60ms以上。→检查电源系统 ·由于电源容量过小,导致启动时电源电压下降。→检查电源系统 ·电源切断5秒以内再接通。→检查电源系统 ·伺服放大器内部故障。→更换伺服放大器 AL.12 存储器异常1、→更换伺服放大器 AL.13 时钟异常、→更换伺服放大器 AL.14 看门狗异常、→更换伺服放大器 AL.15 存储器异常2 →更换伺服放大器 AL.12:RAM ROM异常 AL.13:印刷电路板异常 AL.14:CPU异常 AL.15:EEPROM异常 <主要原因><处理方法> ·伺服放大器内部故障。→更换伺服放大器。 AL.16 编码器异常1 编码器和伺服放大器之间通讯异常。 <主要原因><处理方法> ·接头CN2没有连接好。→正确接线。 ·编码器故障。→更换伺服电机。 ·编码器电缆故障。(断路或短路) →修理或更换电缆。 ·伺服放大器和伺服电机之间配合有误。→使用正确的配合 AL.17 电路板异常2、 AL.19 存储器异常3 AL.17:CPU·零部件异常 AL.19:ROM存储器异常 <主要原因><处理方法> ·伺服放大器内部故障。→更换伺服放大器。 AL.1A 电机配合异常 伺服放大器和伺服电机之间配合有误。 <主要原因><处理方法> ·伺服放大器和伺服电机之间的配合有误。→使用正确的配合。 ·参数No.0选择的伺服电机与当前使用的伺服放大器不匹配。→正确设定参数No.0。
AL.20 编码器异常2 编码器和伺服放大器之间通讯异常。 <主要原因><处理方法> ·编码器接头CN2没有连接好。→正确接线。 ·编码器电缆故障(断路或短路) →修理或更换电缆 ·编码器故障。→更换伺服电机。 AL.24 主电路异常 伺服电机输出端(U·V·W相)接地故障。 <主要原因><处理方法> ·在主电路端子(TE1)上电源输入和输出接线有断路。→修理电线。 ·伺服电机动力线表面损坏。→更换电线。 ·伺服放大器主电路故障。→更换伺服放大器。 制动电流超过内置再生制动电阻或再生制动选件的允许值。 再生制动晶体管异常。 内容:制动电流超过内置再生制动电阻或再生制动选件的允许值。 <主要原因><处理方法> ·参数No.0设定错误。→正确设定参数No.0 。 ·未连接内置的再生制动电阻或再生制动选件。→正确接线。 ·电源电压异常(260V以上)。→检查电源。 ·高频度或连续再生制动运行使再生电流超过了内置再生制动电阻或再生制动选件的允许值。→降低制动频度。→更换容量大的再生制动电阻或再生制动选件。→减小负载。 内容:再生制动晶体管异常。 <主要原因><处理方法> ·内置再生制动电阻或再生制动选件故障。→更换伺服放大器或再生制动选件。·再生制动晶体管故障。→更换伺服放大器。 AL.25 绝对位置数据丢失电池连接线松动或电压偏低 AL.30 再生报警检查再生能耗电路、减小负载 AL.31 超速 转速超出了瞬时允许转速。 <主要原因><处理方法> ·指令输入脉冲频率过高。→正确设定指令脉冲频率。 ·加减速时间过小导致超调过大。→增大加减速时间常数。 ·伺服系统不稳定导致超调。→重新设定增益。不能重新设定增益的场合:①负载转动惯量比设定的小一些。②重新检查加减速时间常数的设定。 ·电子齿轮比太大。(参数No.3、No.4) →正确设定。 ·编码器故障。→更换伺服电机。 参数No.3 有*标记的参数,设定后需将电源断开,再重新接通电源,参数才会生效。 电子齿轮(指令脉冲倍率分子)
YE5850A电荷放大器使用说明书2
YE5850A电荷放大器 使 用 说 明 书 江苏联能电子技术有限公司
一、概述 YE5850A电荷放大器是一种输出电压与输入电荷量成正比的宽带电荷放大器,可配接压电式传感器测量振动、冲击、压力等机械量,广泛应用于水利、动力、采矿、交通、建筑、地震、航空、航天、兵器、化爆等部门。由于下限频率极低,因而特别适合对压电式压力,力传感器进行准静态标定。 YE5850A电荷放大器具有如下特点: ●采用高质量进口器件,稳定可靠 ●可输入电荷信号或电压信号 ●输入等效直流电阻可达1014Ω ●频带宽2μH z-100KH z ●输入可配接长电缆而不影响测量精度 ●操作简单,维修方便,性能好,价格低 ●有两种极性输出 使用环境符合SJ2075-82《电子测量仪器环境要求及其试验方法》Ⅱ组条件。 二、技术参数 2.1 输入特性 2.1.1 最大输入电荷量:106PC。 2.1.2 直流分流电阻:约1014Ω。 2.3 传感器灵敏度调节:三位数字转盘调节传感器电荷灵敏度1~109.9PC/ Unit(1)。 2.4 准确度 三档低灵敏度档: 当输入负载分别小100nF、47nF、10nF时,1KHz基准条件(2),(2) <±1%,额定 工作条件(3) <±2%。 二档高灵敏度档: 当输入负载分别小4.7nF时,1KHz基准条件<±1%,额定工作条件<±2%。 2.5滤波器及频率响应 2.5.1 高通滤波器: 下限频率(-3dB)和时间常数见表1。 注:(1)unit表示机械单位,取决于所用传感器的单位,例:加速度g,绝对加速度单位m/S2,压力单位Kg/cm2,力单位N等。 (2)基准条件:a、20℃±2%;b、相对湿度(45~75)%RH;c、供电电 压AC220V±2%,DC±18V~27V;d、输出负载>10KΩ。 (3)额定工作条件:a、0℃~40℃;b、相对湿度(20~90)%RH;c、 供电电压AC220V±10%,DC±18V~27V。 偏差:0.3Hz以上-3dB±1dB,0.3Hz和0.3Hz以下档为-3dB±1.5dB。 衰减斜率:约-6dB/oct。 M档时间常数:偏差±50% 2.5.2 低通滤波器: 上限频率:0.3,1,3,10,30和100kHz(-3dB) 偏差:-3dB±1dB 衰减斜率:约-12dB/oct。 2.6 输出特性 2.6.1 最大输出:±10Vp(D C~30 kHz)
天虹伺服驱动器说明书.
永磁同步电机驱动器用户手册 THSR-A/B系列
永磁同步电机驱动器用户手册 -I-目录 一.安装 (1) 1.装时注意事项 (1) 2.环境条件 (1) 二.产品型号对照 (2) 1.伺服驱动器铭牌说明 (2) 2.驱动器型号说明 (2) 三.驱动器外观及面板说明 (3) 四.伺服驱动器尺寸图 (6) 五.伺服电机尺寸图 (8) 六.伺服驱动器与伺服电机搭配对照表 (10) 七.驱动器使用电线规格 (11) 八.控制信号标准接线图 (12) 九.驱动器端子说明 (14) 十.伺服驱动器信号输入输出回路图 (17) 十一.驱动器接线方式 (18) 1.绣花机主轴 (19) 2.绣花机移框 (20) 3.绣花机D轴 (21) 4.绣花机H轴 (22) 十二.参数表 (23) 十三.驱动器异常报警 (24) 附录:主轴/移框参数快速设置 (26) 主轴参数快速设置 (26) 移框参数快速设置 (26)
永磁同步电机驱动器用户手册一. 安装 1.装时注意事项 1)驱动器与电机连线勿拉紧;电源线与控制信号线分开走线,有 30cm的间距,这样可以减小电源对信号线的干扰; 2)接线时,禁止将三相电源接至U、V、W端子上; 3)确保接地良好; 4)电机轴心必须与设备轴心对心良好; 5)通电时,请勿拆卸驱动器、电机、或更改配线; 6)通电运行时,请勿接触散热片,以免烫伤 2.环境条件 本产品驱动器使用环境温度为0°C ~ 50°C。若环境温度超过45°C 以上时,请置于条件通风良好的场所。长时间的运转建议在45°C 以下的环境温度,以确保产品的可靠性能。如果本产品装在配电箱里,那配电箱的大小及通风条件必须让所有内部使用的电子装置没有过热的危险。而且也要注意机器的震动是否会影响配电箱的电子装置。除此之外,使用的条件也包括: ▲无发高热装置的场所; ▲无水滴、蒸气、灰尘及油性灰尘的场所; ▲无腐蚀、易燃性的气、液体的场所; ▲无漂浮性的尘埃及金属微粒的场所; ▲坚固无振动的场所; ▲无电磁噪声干扰的场所。 第1页
菱MRJB伺服放大器应用实例
菱M R J B伺服放大器 应用实例 SANY标准化小组 #QS8QHH-HHGX8Q8-GNHHJ8-HHMHGN#
三菱MR-J3-40B伺服放大器应用实例 本人设计一套空间曲线自动焊接设备时用到了三菱MR-J3-40B伺服放大器,现将设计与使用心德与大家分享如下。 本空间曲线焊接设备控制系统包括三菱Q系列CPU、输入模块、输出模块、QD75MH4定位模块、人机界面和3个MR-J3-40B伺服放大器及电机。三菱MR-J3-40B伺服放大器使用主要包括电气接线、外围开关设定和参数程序设定调试等三部分。 1 电气接线 三菱MR-J3-40B伺服放大器及电机电气连接图如图1所示。 图1 MR-J3-40B伺服放大器及电机电气连接图三个伺服放大器主电路为AC220V供电,控制电路用SSCNETIII光纤通信总线电缆菊花型连接。通过SSCNETIII电缆可以最大限度地节省配线,两站之间的最大连接距离可达50米。MR-J3-40B伺服放大器与HF-KP43伺服电机之间接
线如图2所示,伺服电机HF-KP43与伺服放大器MR-J3-40B编码器接口针脚号及接线方式如图3所示。 图2 伺服与电机之间动力线接线图 图3 伺服与电机之间编码器接线图 根据上述方法连接好伺服放大器及电机的线缆后伺服放大器如图4所示。
图4 接好线后的伺服放大器 2 外围开关设置 MR-J3-40B伺服放大器外围开关设定:正常运行时,拔码开关SW2均需拔在Down。根据伺服放大器所处位置及位置模块的定义,SW1选择伺服放大器所对应的轴:SW1=0时对应第一轴,SW1=1时对应第二轴,以此类推,SW1=15时对应第十六轴。本实例中回转伺服SW1=0,升降伺服SW1=1,伸缩伺服SW1=2。如图5所示。 本系统采用绝对位置定位,所以伺服放大器需配绝对位置记忆的电池,伺服放大器的CN4接口接电池,电池如图6所示。
全国电子设计大赛射频宽带放大器
全国电子设计大赛
射频宽带放大器(D题) 摘要 本设计以增益调整、带宽预置、单片机反馈调节为核心,制作一个射频宽带放大器,要求具有0.3~100MHz通频带,增益0~60dB范围内可调,并且实现输入输出阻抗、最大输出正弦波有效值、指定频带内平坦度等功能指标要求。由于系统输入信号小,频率高,带宽要求大,可控增益范围宽,并且需要满足平坦度、输出噪声电压等指标。为此,采用高增益带宽运放组成频带预置、AD8367的压控增益放大系统完成增益调整、单片机实现反馈调节。除此之外,通过增加缓冲级、外加硬件保护措施有效地抑制了高频信号的噪声和自激振荡。经测试,系统对mV ≤的输入信号实现了增益0~60dB范围内可调,带宽0.3~100MHz,并在1 1~80MHz频带内增益起伏dB 1 ≤,且全程波形无明显失真。完成了题目所要求的所有基本要求以及绝大部分发挥部分的性能指标。 关键字:带宽预置AD8367压控增益单片机
1. 系统方案设计与论证 1.1总体方案设计与论证 分析该射频宽带放大器设计的指标,为达到题目所设定带宽与增益可调,并且能够满足在输入和输出阻抗=50Ω的情况下,最大输出正弦波电压有效值达到要求的目的,我们将整个系统分为前置缓冲级、带宽预置、增益调整、输出缓冲级、峰值检波等部分组成,主控器采用STC12系列单片机。系统整体框图如图1所示: 图1 系统框图 1.2前置缓冲级的方案论证与选择 前置缓冲电路使用电压跟随器实现, 如图2所示。考虑到本系统的通频带为 0.3~100MHz ,且输入阻抗限定为50Ω,由 正相输入电压跟随器的输入阻抗为R j 趋 于无穷大,所以图2电路的输入阻抗为 k k k k R R R R R R R R ≈+*==j j j n i //。则可令实际 电路取R k =50Ω以达到输入阻抗要求。除 此之外,此前置放大电路还具有缓冲、避 图2 前置缓冲级 免引入噪声等作用,起到了良好的隔离功能。其电压增益接近于1,运算放大器选用AD8005,此放大器的增益带宽积达到270MHz 。 1.3带宽预置的方案论证与选择 方案一:通过对继电器L 1和L 2触点的控制实现系统通频带0.3~20MHz 和
功放使用说明书
QiSheng 功 放 使 用 说 明 书 该说明书为东莞市奇声电子实业有限公司版权所有
安全碱知 请阅读*用户指南 鬻务愁仏真遂守本用户揩南中的愷明。它有助于悠正■安 芸和援作本爲能.拿用它的先进功籠?i#舉存本屈户!h 南 留件以丘參考u ?&-話丹軼鬓电主运睦、羔潯楚枣产巔受更淋或 豈軌 ■吿:本产鬲不耨受液谑滋灘或锁 洋 黑 心再塔董有渣体的曉炼 应疋 “ 攥卸 产品上或龙产岛册 匚王' 近?切裁it 淹律憑入乘麴的任義部 ":蘆磁埜搏念逆*刊?*妥孑勒讥虬孔竝屠範理 不当' 电洁可踐导龜■畑炖戦.藕蛮对创蜒巖拆 氛 妬看100乜 ⑵m 粗上或岛饥 潺M 昼理拠8 电独 更換电進迥心稈建民上蟆芒董型轄玉号「 雙吉:如果电迪更渙不当.耶MMMT 焙馳血一更囲址 歯嗽 期勢畤认诗的他叫 CR2O32暴DL3O32 等M 钛運电港? 繭适titff 舉旧电池.胃它忏対目地现章"请勿粹 JI 夏化' 企就康茨善烦育的电子产品一 冲时引歳学愆哉璋翩弐火宅 H 心为於电击的念险*拿忘豊人员蓬疵却本产品° + g 接的绦烽人貝洱邂蚪公李宾。 ?K ,tvitaiAit utlli ^kK It£fe I ■ Lrt*l>'IIVAftiltfTi?*, WifiZW 内間期久貳闪电标忑用来?示用户.那境 外亮闷存苻耒紡冷的危祚电JT 耳电※皓右可靛客戍 电奇1&瞠? A 系堆上标示的尊边三鬲理内的i?収号标忑旨布? 示用 /!\ 户.在本用山抬旳力牡楫冷笛靈劉?忡和皇爭招示' 小心:为訪止电击.恥粮电簿蛭播头3朗B 审t 准交涛 俺凉」插座上的竟棘£ 插头要完全SL\播座. #沁:壓罚捧慕吾屋播走遜真它左兀.逗整莖損门理阵. 可盐导塹育碗光雄稈捷生危险的电却舟刼"除具有 适当资格的疆务入盘弊.住気心不拇運整糜算轿*光播 舷■辄 ■希 r 割将崔何駅失次豪f 握点毬的蜻密■于粗■ 工或軽近盛设备* ■吿:邑m a 部件.可繼車连息蔻趙. ms 芬、$乾扎毕镁用. 注?:本产鬲込:标患左十产品虽忘-.■ 注童:以頁忘宇内連用本产品:在枣卉、旅童汽乍或惡範 上匿用聿产品也小捋$本 产品的设计聂謝试麹衷; 注曾;阳就『??翼圭 襦 Tt ?巴帶偌卅十? ■■紬挣- 那却談橹養的设畜应当可沁連像畫王作。 f 匕 咗爭丄口 ■ I .本产品拦合所有竽盟摘會要囂. I U 您可以从 www.Bosexoni/com pl iancs 找到完整 的睜育 声明「 1类漱光产品 抿扬EMEC 60825.粋本CD Ji 啟机归粪为1娄激光产 品4 —类滋光产品的标古位于1S 备旅凱, 1”在产刚之畝 诒闻连本文主于矿有组禅的指示■= 2.谓棵存这些幅示■祈作以后拥竜」 3” 11注童本产船上U 阴用户检南屮的才有皆告= 4+谓)?守所肓桶示, S- 水或漏遷环境帽近檯用本迅* - Ml 勿在理EL 水益.厨宦忠櫚?况衣垃"更虚的地卜室’前一掘乜阳 亡一或任舸有■■貳啦态宜时地月便K 齐讦莆■: 虽 只醍便用干布-井週守Boam 梵司的摘示进行清 却右洼淸 才前茫本产品电洱饮从电通捕升卜慣氏 T*谄勿堵塞任何11凤口「谓按制谐曲的说明进行簣萼- 荷■ 廉本产品的可豊运厅,咲从防止其览热.tttt* 产品放在 A
东汽伺服卡使用手册
版本号:B 东方汽轮机厂 电液伺服阀控制器说明书 编号:M902-007000BSM 第全册 2003年12 月
编号:M902-007000BSM 编制: 校对: 审核: 会签: 审定: 批准:
修改记录表
目录 序号章一节名称页数备注 1 1 前言 1 2 2 硬件简介 1 3 3 功能简介 2 4 4 使用说明9 5 5 故障指示 2 6 6 性能和参数 1 7 7 使用注意说明 1
1 前言 DEA伺服卡是为全电调控制系统DEH配套而专门设计的。该卡采用了16位单片机80C196芯片和高性能的可编程逻辑阵列CPLD构成控制核心,同时采用了16位A/D和D/A芯片提高转换精度。电源部分采用了先进的DC-DC隔离转换器,确保卡件的工作电源和供电电源的充分隔离,使卡件的电源回路工作有效可靠。在实现带电插拔的技术上采用了飞利浦的I2C串行总线技术,在校验过程中将LVDT的全关值和全开值存入E2PROM中,从而实现带电插拔。 伺服卡的工作原理是通过采集LVDT的测量值与控制系统发出的给定值构成比较环节,然后通过PI运算,最终输出调节电流控制调节阀门的运动,使阀门的开度到达给定期望到达的位置。 编制:校对:审核:标审:录入员: 1-1
2 硬件简介 伺服卡控制器的硬件主要包括伺服卡件和机箱组件: 2.1 伺服卡件 伺服卡采用的是四层印制板布线工艺,具有极高的EMC抗干扰能力。板上 主要元器件均采用进口优质元件。 2.1.1 CPU采用INTEL先进的16位单片机80C196,运算处理速度极快。该单片 机内置WATCH_DOG功能,自恢复能力强。 2.1.2 采用Xilinx公司的可编程逻辑阵列XC95108作为单片机的接口部件。该 芯片可以将众多的硬逻辑功能用软件实现,访问速度极快。同时该芯片有 许多的I/O,可以方便的实现外部接口。这样可以使伺服卡增加许多功能 而外围电路极为简单,卡件的集成度大幅度增加而可靠性也大为提高。2.1.3 采用了16位的A/D、D/A芯片作为模拟量信号的采集和输出转换,转换精 度高。其中一片A/D通过前置的通道选择器件采集各种模拟信号,两片D/A 中一片作为阀位输出信号,另外一片作为PI运算后输出电流用。伺服卡 的所有模拟量信号通道均采用了隔离放大器与外部接口实现隔离。 2.1.4 采用飞利浦的I2C串行总线技术,在校验过程中将校验所得的LVDT的全关 值和全开值存入到E2PROM中,从而使卡件在失电后不影响其使用。 2.1.5 采用DC-DC直流电源转换器,确保卡件的工作电源与供电电源实现隔离, 使卡件的电源回路和模拟信号通道在使用中更为安全可靠。伺服卡的所有 开关量信号全部用光电隔离器件与外部信号进行了隔离,确保卡件的工作 尽量不受外部信号的干扰 2.1.6 采用了双路LVDT采集通道,在其中一路LVDT工作不正常时可以实现切换。 内置振荡电路,可以作为LVDT的激励信号用,激励信号的频率和幅值可 以通过卡件上的跳线来设置。 2.1.7 面板上设有多个指示灯以指示各种状态,并有颤动量调节孔和测试端。2.1.8 伺服卡由主卡和插接在其上的数模卡构成。主卡上包括CPU、可编程逻辑 阵列、电源、输入和输出回路等;数模卡主要包含D/A、A/D等构成模拟 量回路。 2.2 机箱组件 2.2.1 机箱采用19”的电磁屏蔽机箱及组件。机箱后面的接线端子统一焊接到电 源母板上,接线方便。 2.2.2 卡件插入机箱时使用推拉式结构,拔插也十分方便。
电子综合设计测量放大器
第6节 电子综合设计范例5----测量放大器 一、设计任务与要求 1、设计任务 设计并制作一个测量放大器及所用的直流稳压电源。参见图1。 输入信号VI取自桥式测量电路的输出。当R1=R2=R3=R4时,V I=0。R2改变时,产生V I≠0的电压信号。测量电路与放大器之间有1 m长的连接线。 2、设计要求 ⑴基本要求 ①测量放大器 a. 差模电压放大倍数A VD=1~500,可手动调节; b. 最大输出电压为±10V,非线性误差<0.5%; c. 在输入共模电压+7.5 V~-7.5 V范围内,共模抑制比KCMR>105; d. 在A VD=500时,输出端噪声电压的峰-峰值小于1 V; e. 通频带0~10Hz f. 直流电压放大器的差模输入电阻≥2 MΩ(可不测试,由电路设计予以保证)。 ②设计并制作上述放大器所用的直流稳压电源。由单相220V交流电压供电。交流电压变化范围为+10%~-15%。 ③设计并制作一个信号变换放大器(参见图2)。将函数发生器单端输出的正弦电压信号不失真地转换为双端输出信号,用作测量直流电压放大器频率特性的输入信号。 ⑵发挥部分 ①提高差模电压放大倍数至A VD=1000,同时减小输出端噪声电压。 ②在满足基本要求(I)中对输出端噪声电压和共模抑制比要求的条件下,将通频带展宽为0~100Hz以上。 ③提高电路的共模抑制比。 ④差模电压放大倍数A VD可预置并显示,预置范围1~l000,步距为1,同时应满足基本要求(1)中对共模抑制比和噪声电压的要求。 ⑤其他(例如改善放大器性能的措施等)。
3、说明 直流电压放大器部分只允许采用通用型集成运算放大器和必要的其他元器件组成,不能使用单片集成的测量放大器或其他定型的测量放大器产品。 二、方案设计与论证 根据题目要求,我们分以下三部分进行方案设计与论证: 1、测量放大器部分 ⑴低噪声前置放大电路的设计最初方案如图1。本电路结构简单,输入阻抗较高,放大倍数可调,但是共模抑制比较小。实测只达到104,所以我们放弃本方案,选择了第二个方案,如图2。此电路的优点在于输入电压接在两个运放的同相端,输入阻抗高,共模抑制比大,可满足要求。其中,直流信号的共模抑制比实测可达2.5×106,交流信号的共模抑制比可达2×105。由电路的对称性可知共模信号被有效地抑制,而差模信号放大了10倍,从而提高了共模抑制比。另外,温度在两个输入端引起的漂移是共模信号,对输出电压影响很小,无需另加补偿。 图1低噪声前置放大电路的设计 图2低噪声前置放大电路的设计
伺服驱动器使用说明书
MMT- 直流伺服驱动器使用手册济南科亚电子科技有限公司
直流伺服驱动器使用说明书 一、概述: 该伺服驱动器采用全方位保护设计,具有高效率传动性能:控制精度高、线形度好、运行平稳、可靠、响应时间快、采用全隔离方式控制等特点,尤其在低转速运行下有较高的扭矩及良好的性能,在某些场合下和交流无刷伺服相比更能显示其优异的特性,并广泛应用于各种传动机械设备上。 二、产品特征: ◇PWM控制H桥驱动 ◇四象限工作模式 ◇全隔离方式设计 ◇线形度好、控制精度高 ◇零点漂移极小 ◇转速闭环反馈电压等级可选 ◇标准信号接口输入0--±10V ◇开关量换向功能 ◇零信号时马达锁定功能 ◇上/下限位保护功能 ◇使能控制功能 ◇上/下限速度设定 ◇输出电流设定功能 ◇具有过压、过流、过温、输出短路、马达过温、反馈异常等保护及报警功能
三、主要技术参数 ◇控制电源电压AC: 110系列:AC :110V±10% 220系列:AC :220V±10% ◇主电源电压AC: 110系列:AC 40----110V 220系列:AC50---- 220V ◇输出电压DC: 110系列:0—130V或其它电压可设定 220系列:0—230V或其它电压可设定◇额定输出电流:DC 5A(最大输出电流10A) DC 10A(最大输出电流15A) DC 20A(最大输出电流25A)◇控制精度:0.1% ◇输入给定信号:0—±10V ◇测速反馈电压: 7V/1000R 9.5V/1000R 13.5V/1000R 20V/1000R 可经由PC板内插片选定并可接受其它规格订制四、安装环境要求: ◇环境温度:-5oC ~ +50oC ◇环境湿度:相对湿度≤80RH。(无结露) ◇避免有腐蚀气体及可燃性气体环境下使用
放大器的设计
模拟电子技术课程设计 一、课题名称:放大器的设计 二、设计内容及要求: 1、要求完成原理设计并通过软件仿真部分 (1)输入为100mV的正弦信号,负载电阻1KΩ,放大器的性能参数为:增益40dB、输入电阻50Ω、输出电阻≤10Ω、通频带范围300Hz—4000Hz。 (2)输入为0.5mV的正弦信号,负载电阻1KΩ,设计放大器的性能参数为:增益80dB、输入电阻≥200KΩ、输出电阻≤50Ω、通频带范围20Hz—400KHz。 (3)输入为10mV的正弦信号,负载电阻1KΩ,设计放大器的性能参数为:增益60dB、输入电阻10KΩ、输出电阻≤20Ω、通频带范围500Hz—10KHz,要求增益可调,调节步进10dB。 软件仿真部分元器件不限,只要元器件库中有即可,但需要注意合理选取。 2、要求实际制作部分 上述(3)输入为10mV的正弦信号,负载电阻1KΩ,设计放大器的性能参数为:增益60dB、输入电阻10KΩ、输出电阻≤20Ω、通频带范围500Hz—10KHz,要求增益可调,调节步进10dB。 硬件制作部分核心元器件:LM324、uA741、ADC0832,电阻电容不限。 三、设计方案分析: 由于晶体三极管及场效应管对环境的要求较高,如果只采用晶体三极管或场效应管来设计放大电路则很容易引起失真,导致设计结果不符合设计要求!而集成运算放大电路有较大的输入电阻和较低的输出电
阻,具有较高的放大倍数,且不容易产生失真,参数也较容易估算,所以在此采用集成运算放大器来设计此课题!另外基于课题中对同频带的要求则需要采用多级放大,并采用电阻与电容的串并联设计一个滤波器,用以达到课题的要求!在课题3中要求增益可调,我们可采用DAC0832数模转换芯片或者组合开关来调节,由于DAC0832数模转换芯片调节起来较为方便,且没有繁杂的参数运算,而组合开关则要求计算出多个参数,较为繁杂,故在此采用DAC0832来设计增益可调部分! 四、方案设计原理 1由于是放大电路的设计,所以为达到目的在此可用两种方案:(1)正相比例运算电路,(2)反相比例运算电路!但由于正向比例运算电路共模输入不为零,在工程应用上基本不采用,所以此设计采用反向比例运算放大电路,如图(一) 图(一) 2滤波器参数的确定:由公式RC =和课题的要求可确定滤波器 fπ2/1 中R和C的参数! 七、DAC0832引脚功能介绍及转换原理 DAC0832是双列直插式8位D/A转换器。能完成数字量输入到模拟量(电流)输出的转换。图4-13和图4-14分别为DAC0832的内部结构图和引脚图。其主要参数如下:分辨率为8位,转换时间为1μs,
ATA-4012电压放大器使用说明书
Agitek 高压功率放大器 ATA-4012 使用说明书
目录 一、产品简介 (1) 二、使用须知 (1) 2.1 注意事项 (1) 2.2 预先检查 (1) 三、产品规格 (2) 四、面板说明 (3) 4.1 前面板 (3) 4.2 后面板 (4) 五、操作说明 (5) 5.1 使用前注意事项 (5) 5.2 输入设置 (5) 5.3输出设置 (5) 六、常规维护 (5) 6.1 更换保险丝 (5) 6.2 清洁 (5) 6.3 常见问题 (5)
一、产品简介 ATA-4012是一台单通道输出的高压功率放大器。最大输出160Vp-p (±80V)电压,输出电流2Arms,可与主流的信号发生器配套使用,实现信号的完美放大。并且具有50Ω、5kΩ两档输入电阻可选,完美匹配高低内阻信号源。 其主要特点如下: ●单通道输出,输出电压增益0~50(0.1step),总输出功率160W ●数控增益可调,调节旋钮可设置粗调(1step)与细调(0.1step)两种方式 ●液晶面板显示,操作简单 ●具有输出开关,控制更加灵活 ●装有风扇进而有效散热 ●输出具有过载保护 二、使用须知 在使用本仪器前,请务必详细阅读安全注意事项,并遵照执行,避免由于误操作降低仪器的使用寿命或造成不必要损失。 2.1 注意事项 (1)请勿自行在仪器上安装替代零件,或执行任何未经授权的修改。非本公司授权人员, 严禁拆开机器。 (2)当启动输出后,请勿直接接触输出端子的金属部分或与之相连的导体。 (3)请将仪器置于通风干燥的环境中使用,环境温度不可超过40℃。请保持仪器清洁干 燥,不要在潮湿的环境中使用,以免内部电路发生短路。 (4)如需要更换保险丝,请按本手册中指定的规格更换。 (5)严禁将本设备使用于生命维持系统或其他任何有安全要求的设备上。 (6)请勿以过快的频率连续开关本电源,可能会导致工作异常。 2.2 预先检查 当拿到一台崭新的ATA-4012时,请按以下建议对仪器进行检查。 (1)检查包装 如果发现仪器包装纸箱,泡沫塑料或箱体等发生严重破损,请勿使用,并联系Agitek公司和承运方确定是哪方责任。如果因承运方运输原因造成的仪器损坏,则由承运方负责赔偿事宜,Agitek公司恕不免费维修或更换。