ProE链传动虚拟装配设计及运动模拟技术的应用
基于Pro_E减速器的虚拟装配及运动仿真
基于Pro/E减速器的虚拟装配及运动仿真王宁1,王兴权2,魏晓波3,张国宏4,周立楠5(1.沈阳工业大学,辽宁辽阳111003;2.中石油抚顺工程建设公司三分公司,辽宁抚顺113001;3.沈阳工业大学工程学院,辽宁辽阳111000)摘要:把Pro/E的虚拟装配技术和运动仿真应用到减速器的设计中,通过利用Pro/E的参数化建模功能,建立圆柱齿轮减速器的三维参数化模型,并且进行了虚拟装配、干涉检验和运动仿真。
该技术在机械工程、化工设备、汽车制造等多领域有很强的实用和推广价值。
关键词:减速器;虚拟装配;运动仿真中图分类号:T P399文献标志码:A传统的机械产品设计通常采用平面图形表示机械零件及其装配关系,设计结果是在某一个位置的静态图形。
这种方法难以反映机器在运行过程中各零件的运动状态及其相对位置关系,无法直观地判断其运动是否合理,各零件之间是否存在干涉等问题。
随着CAD技术的发展及计算机硬件性能的不断提高,三维建模、装配及计算机运动仿真技术逐步得到应用,应用这些技术就可以进行机器的运动仿真分析。
要进行减速器运动学分析,必须首先建立减速器的三维参数化模型。
本文利用Pr o/E的参数化建模功能,建立了圆柱齿轮减速器关键零部件的三维参数化模型,并进行了装配,然后用Pro/E的动画模块进行减速器虚拟装配动画片的制作,同时也运用Pr o/E运动仿真模块对减速器的传动系统进行了干涉检验和运动仿真。
1圆柱齿轮减速器零件的三维建模1.1渐开线圆柱齿轮的三维参数化造型在三维实体造型过程中,对于齿轮这样的复杂模型来说,常规的特征操作已难以满足设计要求,这时可以采用参数和关系式等辅助工具以及扫描混合等高级特征功能。
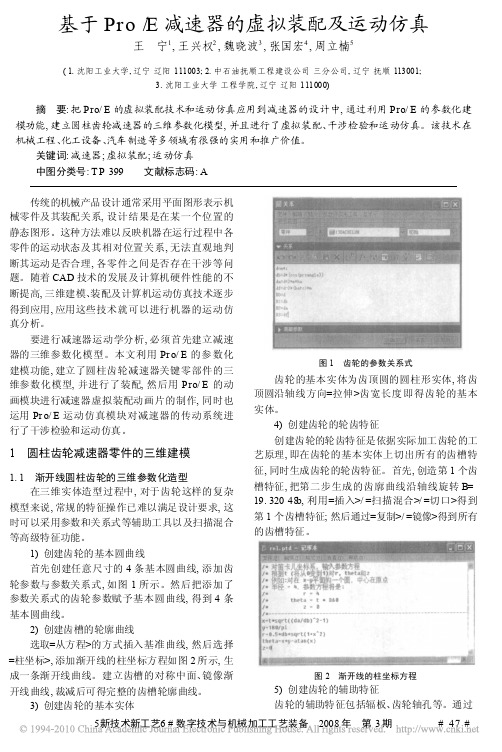
1)创建齿轮的基本圆曲线首先创建任意尺寸的4条基本圆曲线,添加齿轮参数与参数关系式,如图1所示。
然后把添加了参数关系式的齿轮参数赋予基本圆曲线,得到4条基本圆曲线。
2)创建齿槽的轮廓曲线选取=从方程>的方式插入基准曲线,然后选择=柱坐标>,添加渐开线的柱坐标方程如图2所示,生成一条渐开线曲线。
PROE链条仿真资料
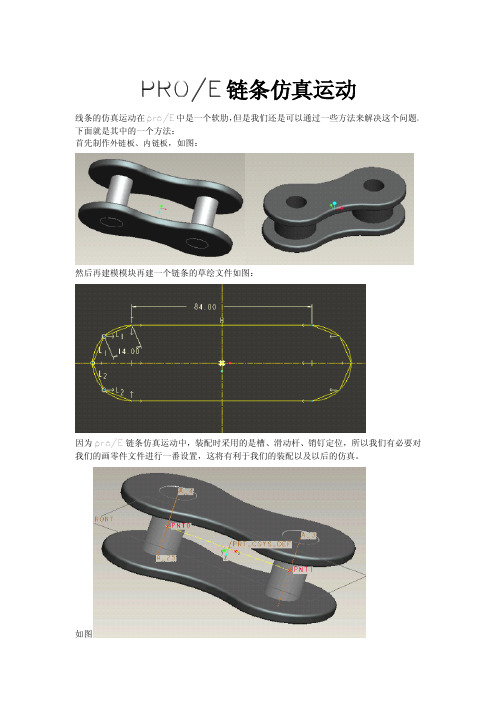
PRO/E链条仿真运动线条的仿真运动在pro/E中是一个软肋,但是我们还是可以通过一些方法来解决这个问题。
下面就是其中的一个方法:首先制作外链板、内链板,如图:然后再建模模块再建一个链条的草绘文件如图:因为pro/E链条仿真运动中,装配时采用的是槽、滑动杆、销钉定位,所以我们有必要对我们的画零件文件进行一番设置,这将有利于我们的装配以及以后的仿真。
如图分别对两个零件设置点PNT0、PNT1以及中心线(中间黄色的那根)再隐藏多余的基准平面(保留如果所有过中心线的那个平面)说明:PNT0、PNT1用于槽定位。
中心线用于滑动杆的定位。
隐藏基准平面那是为了操作方便。
准备好上面的一切就可以开始组装链条了。
首先以缺省方式调入链条草绘文件。
第二步调入一个外链板,首先选择再选择,选择中心线与链条草绘线最长直线边重合,以及保留的那个基准平面与链条草绘的平面重合。
这样定位还是不能满足我们的要求,所有新建约束,鼠标右键——添加集。
增加槽的约束,槽的约束方法为,点选点PNT0,然后点选4段链条草绘边(不包含长度为14的8条线段),做好第一个槽定位,然后再建立一个槽定位,这次选择的是PNT1点和其他4段链条草绘边。
定好第一个链板就算完成一半了,下面定位内链板,定位方法是销钉定位。
首先选择销钉定位,点选内链板和外链板的圆的轴线,然后再点内链板和外链板所保留的基准平面。
销钉定位完成再使用一次槽定位。
以后的所有链板都是如此定位的。
值得N-1个链板的时候,第N-1个链板采用的是两个销钉定位,这里不再多说。
注意:槽的选择一定要把四条线都选择完,要不然很容易出错的。
将链条组装完成后进入仿真板块。
首先建立伺服电机。
注意那个紫色的箭头,方向错了仿真的时候就会出问题,如果不知道怎么设置那个箭头的方向,建议出错后再来跟改。
电机的定义这些设置好后就可以进行分析运行了。
如果出错一定要慢慢的检查。
欢迎你加入绵职院Pro/E群:89020321加入后你可以分享链条仿真的视频教材转载请注明出处教材整理╰G╮●™。
基于ProE软件的可侧斜倒三轮躺车设计与虚拟装配
河南科技学院新科学院2015届本科毕业论文(设计)基于Pro/E的可侧斜倒三轮躺车设计与虚拟装配学生姓名:所在院系:所学专业导师姓名:完成时间:2015年5月10日基于Pro/E软件的可侧斜倒三轮躺车设计与虚拟装配摘要随着科技和经济的高速发展,我国的制造业及其相关行业已经越来越普遍地运用网络绘图工具。
本文根据网络绘图工具的应用,针对可侧斜倒三轮躺车的特征,进行了软件绘图及其虚拟装配。
首先,文章简单的介绍了pro/e的简单操作以及应用特征。
然后根据所学知识,对可侧斜倒三轮躺车进行装配,其中包括零件的合理选择,加工方式,加工工艺,装配及其运动仿真。
当然了,绘制前需要做好充分的准备,包括零件的大小分析,趟车的大小布局等。
绘制后,对其进行受力分析,工艺分析。
通过整个绘制过程的操作,充分体现了pro/e软件在保证加工精度、加工效率等方面的优势。
关键词:Por/e, 可侧斜倒三轮躺车,工艺分析,设计,装配Based on Pro/E software can design and virtual assembly the Lay three-wheel car of inclined side and downAbstractWith the rapid development of science . technology and economy ofChina.China's manufacturing industry and its related industries have become increasingly widespread use of network drawing tool. This paper, based on the application of network drawing tools, according to the characteristics of the lay can skew down three rounds of car, the drawing software and virtual reality software.First, this paper simply introduces the simple operation and application characteristics of pro/e. Then, according to the knowledge of side lay down three cars are assembled, including the reasonable selection of the parts, processing methods, processing, assembling and motion simulation. Of course, need to be well prepared before drawing, including parts of the size of the analysis, the size of the train layout, etc. After drawing, carries on the force analysis and process analysis.Through the operation of the whole process of drawing, fully embodies the pro/e software in guarantee machining accuracy, efficiency and other advantages.Keywords: Por/e , the Lay three-wheel car of inclined . side and down, technology analysis , design , assembly目录绪论 (1)1 设计内容和要求 (2)1.1 设计要求 (2)1.2设计条件 (3)2 可侧斜倒三轮躺车链传动的工艺分析 (3)2.1链传动工作情况的分析 (3)2.1.1链传动的结构特性 (3)2.2确定链长和中心距 (6)2.3链传动的布置、张紧 (6)2.4可侧斜倒原理 (7)3 可侧斜倒三轮躺车的设计 (8)3.1可侧斜倒三轮躺车的设计制造 (8)3.2车把的设计 (10)3.3 螺栓,螺母的设计 (12)3.4 平衡杆的设计 (14)3.5 链轮的设计 (15)3.6 附件的设计 (18)4 干涉分析及处理 (21)5 零件的装配 (22)6 结论 (23)参考文献 (24)致谢 (25)绪论随着制造设备的数控化率不断提高,计算机绘图软件在我国得到日益广泛的推广和应用,在制造业计算机绘图工具已经逐渐替代手绘模式,在制造业史上,是一次质的飞跃。
proe链轮仿真教程
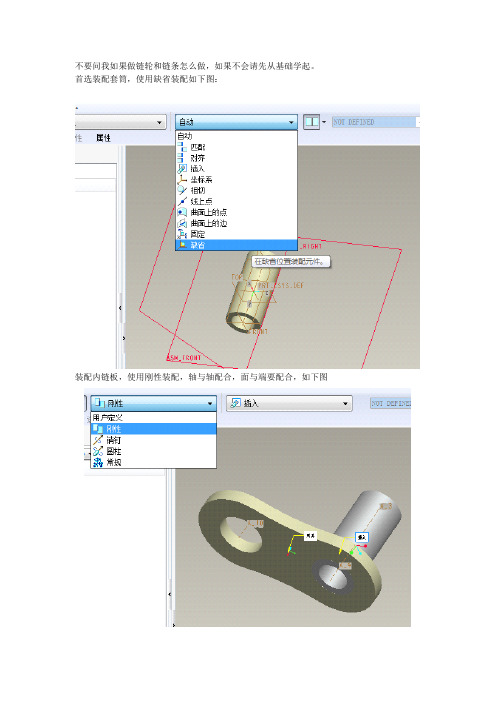
不要问我如果做链轮和链条怎么做,如果不会请先从基础学起。
首选装配套筒,使用缺省装配如下图:john18@ 装配内链板,使用刚性装配,轴与轴配合,面与端要配合,如下图同样方法装配第二个套筒装配第二个内链板,方法与第一块内链板一样,不同之处是分别插入第一套筒和第二套筒john18@装配合一根销轴,使用销钉装配,销轴轴装配到套筒轴,销轴top基准面对齐asm_top基准面。
john18@ 同样的方装配第二销轴,不同之处是销轴top基准面对齐套筒基准面。
用销钉装配,装装配好两个滚子。
使用刚性装配装配两块外链板,在装配中对齐要选择外侧板对销轴。
john18@装配链轮和链条仿真新建装配文档创建两条轴,以便放置两个链轮。
装配190链轮,选择销钉装配john18@同样方法装好小链轮。
创建运行轨迹参照两个链轮齿中心绘制运行轨迹线john18@这里与大家分享一个关键的经验,这一条轨迹线的位置很难确定,因为这一条线要与链条上的点对齐,所以可以如下图用常规装配分别在两个链轮上装配好两段,然后参照两个链轮来画轨迹线。
装配链条的关键点:1链条上所有节点槽连接于轨迹线2滚子和链轮之间是凸轮连接,每隔(齿数/2-1)个滚子建一个凸轮连接即可,凸轮属性需要“启用升离”链轮装配太耗电脑资源了,一个链节就是两个槽约束,装几个链节都要半天。
装配链条使用槽装配。
选择轨迹线与链条上的点对齐为了方便操作,可以选择关闭所有基准线、面。
john18@选择轨迹线,在链条上找到刚才创建轨迹线时用的点与轨迹线对齐。
同一节链节要装配两个槽连接。
接着打开基准面,为链条选择一个参照平面,要不链条岂不是在线上转圈?看清了吧,两个槽连接加一个常规连接,这个常规连接在其它链条节装配时会被园柱代替。
如下:依次添加链条节需要注意提是链条不能加满,就是你绘制的轨迹线长度99%可能不能被链节长度整除,更john18@加上在弯处是弦长,更是难以计算。
所以满了就会有干涉。
链轮链条装配就结束了下面是仿真部份仿真部份的关键在凸轮连接,如图的第二个图标john18@凸轮连接平均分部的滚子间隔个是,链与齿轮接触齿数减一,大约就是这样。
利用Pro_E和VRML实现齿轮泵虚拟装配技术
第21卷第5期2007年10月 江苏科技大学学报(自然科学版)Journa l o f Jiangsu U n i ve rsity o f Science and T echno l ogy(N a t ura l Sc i ence Ed iti on)V o1 21N o 5O ct.2007文章编号:1673-4807(2007)05-0055-04利用Pro/E和VRML实现齿轮泵虚拟装配技术叶福民1,2,陈晓兵2(1.江苏科技大学机械与动力工程学院,江苏镇江212003;2.南京航空航天大学机电学院,江苏南京210016)摘 要:虚拟装配设计是装配设计的技术革新,它利用计算机将装配设计过程扩展到虚拟三维空间,能动态观察产品的各个细节。
本文以齿轮泵虚拟装配为例,利用三维造型系统P ro/E建立模型,阐述了VR M L与P ro/E建模方法,对转化成VRM L模型文件进行优化与压缩,VRM L动画实现,进行装配中的干涉检查,并完成其虚拟装配过程。
此方案为复杂机械产品的虚拟装配提供了一种可借鉴的技术与方法。
关键词:VRM L;P ro/E;虚拟装配;齿轮泵中图分类号:TP391 9 文献标识码:AV i rtual Assembl y for G ear pump Base on Pro/E and VR MLY E Fum in1,2,C HE N X iaob i n g2(1.S c hool ofM echan i cal and Po w er Eng.,J i angs u Un i vers i ty of S cience and Tec hnology,Zhen jiang Jiangsu212003,C hi n a;2.College ofM echan i cal and E l ectricalEng i neeri ng,N an ji ng Un i vers i ty ofA eron auti cs and A stronau tics,Nan jing Jiangsu210016,C hi n a) Abstract:The virtua l asse mb l y is consi d ered as the renovati o n for t h e asse m bly techn i q ue.By m eans o f co m put er,the asse mb l y process can be extended to the v irtual3D space and each part of the product body can be ob served dyna m ically.Tak i n g the gear pu m p asse m bly as an exa m ple,the pu m p model is estab lished by usi n g the soft w are Pro/E.The m ethods of i n teractive asse mb li n g w ith the virtua l reality m odeling language(VR ML)are i n troduced.The key techno l o gy i n m ode li n g based on Pro/E and VRML is also descri b ed e m phatically.The opti m ization and co mpressi o n ofVRML files,the realizati o n of an i m ation w ith VR M L as w ell as the co llision chec k i n g of asse m bly are also expounded.It can prov i d e the experience f o r the virtua l asse mb l y o f co m plex m echani ca l products w it h these techn i q ue and m et h ods.K ey words:VR M L;Pro/E;v irtual asse mb l y;gear pump0 引 言虚拟装配技术是虚拟现实技术在设计与制造领域的重要应用之一,它在降低产品开发成本,缩短产品开发周期,产品三维全景展示等方面有着重要意义。
基于Pro-E牛头刨床变速箱虚拟装配和运动仿真
基于Pro/E的牛头刨床变速箱的虚拟装配和运动仿真摘要:利用pro/e设计软件,建立牛头刨床变速箱各零件三维模型,并对其进行虚拟装配和运动仿真,缩短了产品的开发周期,提高了产品的设计效率,其设计方法可以借鉴到其他产品的的设计。
关键词:牛头刨床变速箱 pro/engineer 虚拟装配运动仿真中图分类号:th12 文献标识码:a 文章编号:1674-098x(2012)06(b)-0056-011 牛头刨床变速箱的基本结构牛头刨床变速箱是滑移齿轮变速机构,通过排挡杠杆带动变速制动轴上的叉子来实现变速。
b665牛头刨床变速箱的变速机构如图1所示,轴ⅰ为输入轴,有电动机直接驱动。
轴ⅲ为输出轴,在轴ⅰ上安装齿数为20(2019)-30(2021)-25(2022)的三联滑移齿轮,轴ⅲ上安装齿数为30(2028)-48(2031)的双联滑移齿轮,与各固定齿轮组成滑移齿轮变速机构。
改变各滑移齿轮的位置,就可以改变该轮系的传动比,满足变速要求。
2 变速箱虚拟装配的实现2.1 零件的三维建模牛头刨床变速箱的零件大概共有180多个,其中很多的建模方式大致相同,利用pro/e的零件模块,通过必要的草绘,进行拉伸,旋转,镜像,阵列等建模方式得到零件的三维模型。
标准件可以到标准件网站下载获得或者自己按照要求进行三维建模。
变速箱中有很多齿轮,以渐开线圆柱直齿轮为例说明齿轮建模。
已知齿轮模数m=4mm,齿数z=35,齿轮厚b=28mm。
按照齿轮的孔和齿顶圆的直径的尺寸绘制胚体;再通过草绘,绘制齿顶圆和齿根圆,并通过“曲线”→“从方程”输入渐开线的方程,保存形成渐开线曲线;利用“镜像”生成另外一条渐开线,把镜像得到的渐开线阵列;利用“拉伸”→“边创建图元”,生成第一个齿槽;选择生成的齿槽,利用“阵列”设置数量和角度生成齿轮。
2.2 牛头刨床变速箱零件的虚拟装配虚拟装配就是把各个实体模型通过一定的约束关系组装成一个个子组件,再将各个子组件组装起来形成一个完整组件的过程,在装配过程中,设计人员可以及时发现和处理装配过程中的各种问题。
基于ProE的连杆机及运动仿真分析
基于PRO/E的连杆机构设计及远动仿真分析摘要连杆机构是机械中常见的一种机构,是往复式内燃机的主要工作机构。
曲柄连杆机构是发动机实现工作循环,完成能量转换的主要远动零件。
虚拟装配与远动仿真是根据产品的形状特征.精度特性,利用计算计图形学和仿真技术,在计算机上模仿产品的实际装配过程.仿真模拟机器的远动过程。
通过对曲柄连杆机构进行有关运动学和理论分析与计算机仿真分析,利用PRO/E软件的装配功能,将曲柄连杆机构的各组成零件装配成活塞组件.连杆组件和曲柄组件,从而完成内燃机曲柄连杆机构的虚拟装配与运动仿真。
在内燃机的开发设计阶段应用这种方法可以大大缩短产品的开发周期,减少样机实验次数,快速的对市场做出反应,降低产品的成本,提高企业的竞争力。
关键词:曲柄连杆机构:虚拟装配:运动仿真;装配功能Based on Pro/E internal combustion engine connecting rod assembly and motion simulation of the virtualAbstractThe crank is a common machinery, reciprocating internal engine is the main working body. Crank the engine duty to achieve of the main moving parts of energy. Virtual and motion simulation based on tee shape of product precision features the use of computer graphics and simulation technology, the product on the computer to imitate the actual assembly process the movement of the machine Crank through the relevant kinematics and dynamics of the theoretical analysis and computer simulation analysis, the use of Pro/E, assembly features, the crank assembly of the constituent parts into a piston, connecting rod assemblies and crankshaft components, to complete the internet combustion engine connecting rod assembly and motion simulation of the virtual. The development of internal combustion engine design using this method can greatly shorten the product development cycle and reduce prototype test times, respond quickly to market, lower product costs and improve the competitiveness of enterprises.Keywords: crank Vrtual assembly; Motion simulation;assembly features目录1绪论 (5)1.1本课题研究的目的和意义 (6)1.2国内外的研究现状及发展趋势 (7)2设计的方案 (9)2.1研究的基本内容 (9)2.1.1连杆机构的结构设计 (9)1手压抽水机的结构特点 (9)2手压抽水机的设计 (9)3连杆机构的装配 (13)3.1手压抽水机的装配 (13)3.2伺服电动机定义 (22)3.3运动分析定义 (23)4本文总结 (24)5参考文献 (25)6致谢 (26)1绪论1.1本课题研究的目的和意义基于虚拟现实的产品虚拟拆装技术在新产品开发、产品的维护以及操作培训方面具有独特的作用。
基于Pro_E3_0环境下链传动曲线运动仿真的实现方法

上所有的内外链节 ,完成整
个传动链的装配 。装配好的
传动链如图 5 所示 。 (5) 将整个传动链装配
图 5 传动链装配图
到自行车上 。在装配模式下调入先前已经装配完成的 自行车组件 ,选用“缺省”的装配模式 ,将上面组装完成 的整个链作为一个零装配到整机上 ,完成自行车的装 任务 。保存装配文件 。
Abstract The simulation and modeling function of Pro/ E is strong , so it was applied widely in modern design. But Pro/ E has its own big lack at the chain drive simulation. It could only do the simulation of the straight line and the circular but it could not solve the simulation of chain2drive curvilinear motion , so the simulation of the irregular chain motion like the bicycle chain could not be reached based on Pro/ E in the past . In this article , the பைடு நூலகம்imulation of the chain drive motion is studied based on Pro/ E and a effective method is proposed.
关键词 Pro/ E 链传动 运动 仿真
The Simulation of the Curvilinear Motion of the Chain Drive based on Pro/ E 3. 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Pro/E链传动虚拟装配设计及运动模拟技术的应用
本文讲述了链传动的三维虚拟装配与运动学模拟在Pro/ENGINEER软件中的实现方法,并对链传动动力学模拟提出了使用专业模拟平台的建议。
一、链传动概述
链传动有短节距精密滚子链、双节距精密滚子链、短节距精密套筒链、弯板滚子传动链、齿形传动链以及成型链等多种传动类型。
链传动的突出特点是构成链条的元件体积小、数量多,链节节距均匀,滚子/套筒结构可以减少啮合时的摩擦和磨损,并能达到缓和冲击的目的。
链传动的运动学模拟效果对于机械总体检查、链节结构设计与改进及链节数量的配置具有重要的验证作用,链传动运动动画对于链传动机构的产品演示、项目开展与交流不可或缺。
由于链节元件小而多的特点决定了链条传动的灵活性和实用性,而元件数量过多使得链传动三维机构模拟在普通计算机上难以实现,巨大的求解数据量对三维软件和计算机硬件的配置提出了很高的要求,在通用CAD三维软件中进行模拟链传动困难很大。
本文将探讨在Pro/ENGINEER野火版环境下进行链传动设计与运动学模拟,最后推荐两个专业的链传动动力学模拟软件环境,希望对链传动用户有所帮助。
二、Pro/ENGINEER链传动三维设计与运动学模拟
链传动的设计首先要根据传动功率要求确定大小链轮的齿数、链节运动轨迹以及链节的类型和规格,通过计算确定出链节数量,为链传动机构模拟打好基础。
下面是链传动模拟的构建流程。
1.步骤一
设计链传动运动轨迹,确定链节的接口长度和节数。
如图1和图2所示,使用草绘曲线绘制轨道,两链轮中心线水平。
该次链传动设计共20节链节(这里没有绘制大小链轮)。
图1 链传动轨迹曲线
图2 链条模型
2.步骤二
设计链节元件。
可以按照实际情况设计构成链节的内/外链板、销轴和套筒,然后组装成链节子组件。
为了减小链传动机构模拟运算的时间和运算数据量,这里仅用一个零件代表链节的所有组成元件(如图3)。
3.步骤三
链条组件第1、2个链节的装配。
创建链条组件,装配第1个链节(如图4),使用1个"平面"接头、2个"槽"接头。
选槽曲线时按ctrl键选4段。
装配第2个链节(如图5)时,在第1个链节右侧装配第2个链节,使用1个圆柱接头和1个槽接头。
图3 简化链节模型
图4 装配第一个链节
图5 装配第二个链节
4.步骤四
使用动力学模拟技术模拟链传动。
从标准建模环境转到机构模拟环境(从"应用程序"→"机构"),从"插入"→"初始条件",打开"初始条件定义"对话框。
点击定义切向槽速度图标,选第一个链节上的槽连接符号(如图6),输入速度值300mm/sec。
从"分析"→"机构分析",弹出"分析定义"对话框,选用"动态"分析类型,初始配置启用初始条件,电动机和外部负荷选项卡全部清除选取。
点击"分析定义"对话框底部的按钮,可以发现两个链节沿着轨道运动。
图6 设置切向槽速度方向
图7 初始条件定义
图8 动态分析定义
该方法是用动力学模拟的切向槽速度为初始条件,并且使用动力学模拟的"动态"分析类型模拟运动学轨迹。
这对于几个链节的运动是可以的,如果将所有链节都装配到位,则链条的机构模拟需要非常高的硬件配置,而且需要更长的运行计算时间。
5.步骤五
使用运动学模拟技术模拟整根链条的传动。
由于步骤四的模拟方法需要求解力学属性,给模拟运算带来了一定的困难。
下面是使用运动学分析类型进行模拟。
按步骤三装配其他链节:选中第2个链节,顺时针方向使用"重复"命令装配其他零件接头关系,只重复圆柱接头,如果元件重叠则移除重叠元件,退出"重复"对话框;选中最后1个元件重新进行重复操作,直到重复完成第20个链节(如图2)。
装配完注意到最后一个链节的后安装孔无法与第1个链节的前安装孔轴对齐,可以将最后一个链节创建一个单独的零件,使孔轴尽量对齐(受装配误差和轨道位置的影响,在运动过程中该处无法实现轴完全对齐,如图9所示)。
将第1、6、11、16个链节添加不同颜色,并在第6、11、16个链节上进行新设置,增加平面副(如图10)。
图9 最后一个与第一个链节无法对齐
图10 添加另外3个平面副
再分别参照4个平面副定义角速度,使第1、6、11、16个链节在圆周上运动时分别充当驱动元件,每次转过125度。
另外,通过核查运算,如果角速度为125度/秒时,则第1个链节旋转一周大约需要时间4.2s。
进入机构环境,将当前装配体拍摄快照。
参照第1、6、11、16个链节上的平面副接头Z轴(查询选取)定义伺服电动机(如图11和图12)。
所有电机设置均为:速度方向(紫色箭头)向外,按右手定则逆时针旋转链条。
设置速度初始角,选中"当前",速度值为125。
图11 运动角速度定义
图12 速度定义设置
定义并运行运动分析。
类型选择"运动学",终止时间为4.2s(如图13)。
在"电动机"选项卡中,设置每个电动机的生效时间段是这次链传动模拟的关键。
由于前后两个电动机在临界点处不能重合(单一函数值),所以第2个电动机的起始时间比第1个电动机的结束时间推迟0.01s(如图14),对于这0.01s的时间差在最小时间间隔范围之内,是模拟计算误差所允许的。
点击"运行",链传动正常运行。
图13 运动学定义
图14 电动机作用时间段
对于链轮的旋转运动模拟,定义两个伺服电动机确定两个链轮的传速比,通过快照确定链轮和链节之间的外观啮合位置,即可完成链轮和链条的整体传动效果。
上述链传动模拟方案是在简化链节元件的前提下成功进行的,由于链传动模拟运算数据量特别大,运行模拟时可能需要几个小时甚至几天的时间,因此在运行链传动机构模拟完成时,要及时将运行结果保存(*.pbk机构回放文件),以便后续对链传动模拟结果进行更深入的研究。
三、链传动应用效果与动力学模拟专业平台实例
链传动在自行车、摩托车等普通交通工具上的滚子链、发动机等传动机构上的齿形链,以及在工程机械车辆上用的履带行走系统等都有广泛应用。
下面是常见的发动机正时链、工程机械履带传动结构,以及链传动的动力学模拟与应用。
对于这些典型的链传动,许多专业软件平台给出了专业的算法模型和模拟方法,下面是两个典型软件供应商给出的链传动解决方案。
(1)韩国FunctionBay公司基于递归算法的MFBD(多柔体动力学)分析软件
--RecurDyn,其高机动性履带包对履带车辆的履带链节受力情况与车辆通过性给出了比较现实的求解方案,如图15所示。
图15 履带行走系统建模和通过性模拟
(2)奥地利AVL李斯特公司的发动机先进模拟技术软件--Excite,对发动机正时链传动给出了专业仿真分析策略,如图16所示。
图16 发动机正时链传动建模和动力学模拟。