基于单片机的六足机器人控制软件设计--毕业论文
基于51单片机的六足机器人控制系统设计与制作
・5 l・
基于 5 1单片机 的六足 机器人控制 系统设计 与制作
De s i g n a n d Ma n u f a c t u r e o f Co n t r o l S y s t e m o f He x a p o d Ro b o t Ba s e d o n 5 1 S i n g l e编号 : 1 0 0 6 — 4 3 1 1 ( 2 0 1 3 ) 3 0 — 0 0 5 1 — 0 3
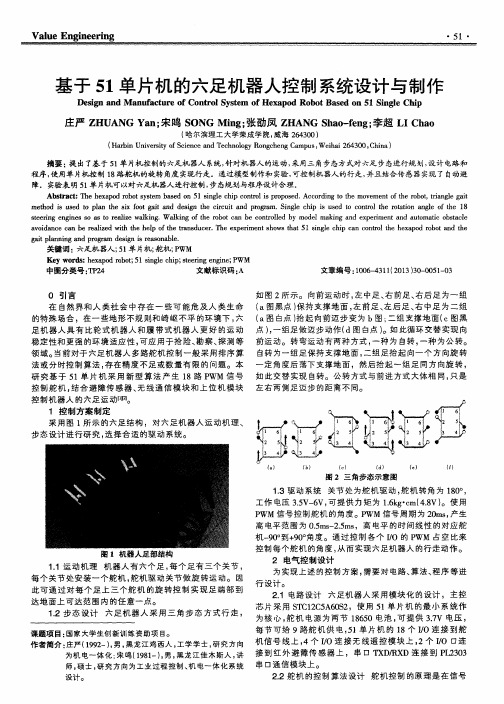
如 图 2所 示 。 向前 运 动 时 , 左 中足 、 右前 足、 右 后 足 为 一 组
在 自然界和人 类社会 中存在一 些可 能危及人 类 生命 ( a图黑点 ) 保持支撑地面 , 左 前足、 左后 足、 右 中足为二组 的 特 殊 场 合 ,在 一 些 地 形 不 规 则 和 崎 岖 不 平 的环 境 下 , 六 ( a图 白点 ) 抬 起 向前迈步 变为 b图 ; 二组支撑地面( C图黑 , 一 组 足 做 迈 步 动作 ( d图 白点 ) 。如 此循 环 交 替 实现 向 足机器人 具有 比轮 式机器人 和履 带式机器 人更 好 的运 动 点 ) 稳 定性和更强 的环境适应性 , 可应用于抢 险、 勘察、 探 测等 前运 动。转 弯运动 有两种 方式, 一种 为 自转, 一种 为公转。 二组 足 抬 起 向 一 个 方 向旋 转 领 域。 当前对于 六足机器人多路舵机控制一般采 用排 序算 自转 为一 组 足 保 持 支撑 地 面 , 法或分时控制算法 , 存在精度不 足或数 量有限 的问题 。本
Ab s t r a c t : T h e h e x a p o d r o b o t s y s t e m b a s e d o n 5 1 s i n g l e c h i p c o n t r o l i s p r o p o s e d . Ac c o r d i n g t o t h e mo v e me n t o f t h e ob r o t , t r i a n g l e g a b me t h o d i s u s e d t o p l a n he t s i x f o o t g a i t a n d d e s i g n t h e c i r c u i t a n d p r o g r a m.S i n g l e c h i p i s u s e d t o c o n t r o l t h e ot r a t i o n ng a l e o f t h e 1 8 s t e e in r g e n g i n e s S O a s t o r e a l i z e wa l k i n g . Wa l k i n g o f t h e ob r o t c a l l b e c o n t r o l l e d b y mo d e l ma k i n g a n d e x p e i r me n t a n d a u t o ma t i c o b s t a c l e a v o i d nc a e c a n b e r e a l i z e d wi t h t h e h e l p o f he t t r a n s d u c e r .T h e e x p e r i me n t s h o ws t h a t 5 1 s i n g l e c h i p c a n c o n t r o l t h e h e x a p o d r o b o t nd a he t g a i t p l a n n i n g a n d p r o g r a m d e s i g n i s r e a s o n a b l e .
基于STM32的六足机器人系统设计
科教论坛 ScienceandEducationForum234教育前沿 Cutting Edge Education基于STM32的六足机器人系统设计文/刘飞摘要:六足机器人在复杂环境中行走时,由于未知地形容易对机器人的控制系统引入不可预知的扰动,影响机器人的运行平稳性,为了减少机器人因运动的不稳定性对机器人机身结构造成的冲击。
需要采用合适的控制方式控制机器人各关节位姿适应复杂地形。
保证机器人系统具有良好的动态稳定性。
本文以处于复杂多变环境中的六足机器人为研究对象,设计了机器人机身结构,开发了其控制系统,并以其关节运动平稳性、响应快速性和位姿准确性的提高为目的,重点对机器人关节模糊PID控制算法进行了研究。
主要研究内容为:首先,对六足机器人的机身结构进行了优化设计,并对机器人样机进行了运动学分析,得出了机器人足部的运动范围以及关节变量与机器人足部位姿的关系。
其次,在机器人运动学分析的基础上,规划了机器人纵向和横向直行的三角步态,给出了当机器人采用三角步态直行时,能保持机器人静态稳定的步长计算方法,结合机器人行走步长分析了机器人纵向和横向直行步态的稳定性。
当机器人采用三角步态直行时,若其步长小于能保持步态静态稳定的临界步长,机器人的步态是静态稳定的,否则不是静态稳定的。
关键词:六足机器人;系统设计1 六足机器人结构六足机器人的控制分为两大部分。
即硬件控制部分和软件部分。
其中硬控控制部分又分为三个部分。
电源、主控、通信。
软件部分分为原理和射程序设计。
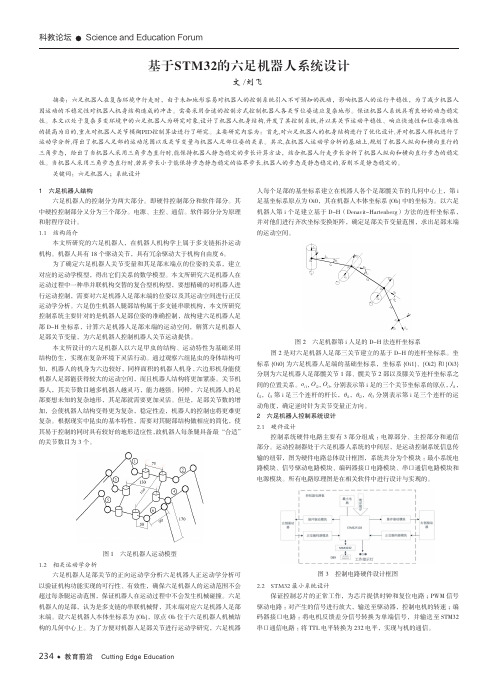
1.1 结构简介本文所研究的六足机器人,在机器人机构学上属于多支链拓扑运动机构。
机器人具有18个驱动关节,具有冗余驱动大于机构自由度6。
为了确定六足机器人关节变量和其足部末端点的位姿的关系,建立对应的运动学模型,得出它们关系的数学模型。
本文所研究六足机器人在运动过程中一种串并联机构交替的复合型机构型,要想精确的对机器人进行运动控制,需要对六足机器人足部末端的位姿以及其运动空间进行正反运动学分析。
六脚爬虫机器人的机械结构以及控制程序的编写 自动化专业毕业设计 毕业论文

摘要本文详细介绍了六脚爬虫机器人的机械结构以及控制程序的编写。
机械结构采用了对称式设计,结构简单;其行走功能由六只脚、18个舵机实现,自由度较高,稳定性、灵活性较好。
控制程序的主体是C语言。
包括基本步态的编写,以及传感器的在机器人上的高级应用,这样,机器人在满足基本行走运动的同时,也能感知外界环境,并通过控制器对接收到的外界信号进行处理,并控制机器人运动。
关键词:对称式结构,舵机控制器,步态,传感器IAbstractThe thesis describes in detail that the mechanic design of Hexcrawler and the compiling of control program.The structure of the robot is in symmetric expression, a simple mechanism; the function of walking is supported by six legs, and eighteen motors, with multiple degrees of freedom. Besides, it is of high stability and flexibility.The program to control the robot is written in C language, including basic gait, the advanced application of sensors. Thereby, the robot can walk in several gaits. At the same time, it can sense the condition around it. Then, it will process the data it received, and control the motion of the robot.Keywords: symmetric expression,PSCU, gait, sensorII目录摘要 (I)Abstract ··························································································································I I 目录·······························································································································I II 1 绪论 ·······················································································································- 1 -1.1课题来源····················································································································· - 1 -1.2本课题的目的及其意义 ····························································································· - 1 -1.3国内外发展现状 ········································································································· - 1 -1.4本课题的研究内容 ·······································································错误!未定义书签。
基于单片机控制的新型六足机器人毕业设计

目录1 引言1.1新型六足机器人研究目的和意义 (1)1.2新型六足机器人研究概况及发展趋势 (1)1.3课题研究内容 (2)2 机械结构与芯片简介2.1机器人机械结构 (3)2.2机器人运动原理 (3)2.3驱动装置选择 (5)2.4机器人实物图 (6)2.5硬件结构介绍 (7)2.6单片机芯片介绍 (8)2.7编码解码芯片介绍 (13)3 控制系统结构设计3.1上位机控制 (16)3.1.1 程序语言及串口通讯 (16)3.1.2 人机交互界面 (17)3.2 基于无线的智能控制 (19)3.2.1 无线发射模块 (19)3.2.2 无线接收模块 (23)4 结论 (29)参考文献 (30)致谢 (31)新型六足机器人1 引言1.1新型六足机器人研究目的和意义本文六足机器人是一种基于仿生学原理研制开发的新型足式机器人。
新型机器人比传统的轮式机器人有更好的移动性,它采用类拟生物的爬行机构进行运动,自动化程度高,具有丰富的动力学特性。
此外,足式机器人相比其它机器人具有更多的优点:它可以较易地跨过比较大的障碍(如沟、坎等),并且机器人足所具有的大量的自由度可以使机器人的运动更加灵活,对凹凸不平的地形的适应能力更强;足式机器人的立足点是离散的,跟地面的接触面积较小,因而可以在可达到的地面上选择最优支撑点,即使在表面极度不规则的情况下,通过严格选择足的支撑点,也能够行走自如。
因此,足式步行机器人的研究已成为机器人学中一个引人注目的研究领域,由于六足机器人强大的运动能力,可以提供给运动学、仿生学和机械构造原理研究有力的工具[1]。
在研究昆虫运动方式、关节承力、稳定姿态调整的过程中,可以运用本机器人对设想的虫体姿态、运动过程进行模拟,最大程度地接近真实,将理论和实践联系起来,从而更好地观察昆虫运动模式的优点,以及探究哪些现象能够运用到机械设计的实践中去。
这对于以上学科的研究和探索都是十分有意义的。
当然,我们还可以作为教学器械,通过研究昆虫爬行时各脚的运动情况,用机械形式表达出来,也可以作为仿生玩具及探险、搜救设备,还可以进入细小管道、地洞中勘察。
六足机器人的设计,毕业论文
摘要随着人类探索自然界步伐的不断加速,各应用领域对具有复杂环境自主移动能力机器人的需求,日趋广泛而深入。
理论上,足式机器人具有比轮式机器人更加卓越的应对复杂地形的能力,因而被给予了巨大的关注,但到目前为止,由于自适应步行控制算法匮乏等原因,足式移动方式在许多实际应用中还无法付诸实践。
另一方面,作为地球上最成功的运动生物,多足昆虫则以其复杂精妙的肢体结构和简易灵巧的运动控制策略,轻易地穿越了各种复杂的自然地形,甚至能在光滑的表面上倒立行走。
因此,将多足昆虫的行为学研究成果,融入到步行机器人的结构设计与控制中,开发具有卓越移动能力的六足仿生机器人,对于足式移动机器人技术的研究与应用具有重要的理论和现实意义。
六足仿生机器人地形适应能力强,具有冗余肢体,可以在失去若干肢体的情况下继续执行一定的工作,适合担当野外侦查、水下搜寻以及太空探测等对自主性、可靠性要求比较高的工作。
关键词:六足机器人,适应能力强,结构设计AbstractWith the increasingly rapid step of human exploration of nature, the demand for robots with autonomous mobility under complex environment has been getting broader and deeper in more and more application areas. Theoretically, legged robot offers more superior performance of dealing with complicated terrain conditions than that provided by wheeled robot and therefore has been given great concern, however up to now,for the reason of absence of adaptive walk control algorithm,legged locomotion means still could not be put into practice in many practical applications yet。
基于STC单片机的仿生六足机器人设计

基于STC单片机的仿生六足机器人设计吴宏岐;郭梦宇【期刊名称】《电子器件》【年(卷),期】2013(036)001【摘要】To satisfy the requests of special conditions for the robot, a hexapod robot is designed by using bionics principle which can mimic the motion of some animal. The STC microcontroller is used as the core of control circuit. The AET168P1 steering gear control panel is used to drive the sports joints through the YZW-Y 09G type steering gear. It can achieve each function of application requirements under software control. The robot has a strong adaptability to all sorts of the ground condition, such as it is not easy to fall into the soft ground. The system has shown its high value such as low cost,strong anti-interference capacity,high sensitivity and reliability.%为满足特殊环境对于机器人的提出的要求,应用仿生学原理,设计一六足机器人,可模仿生物的运动形式;它以STC12C5A60S2型单片机为控制核心,通过YZW-Y09G型舵机来驱动的运动关节,选用AET168P1舵机控制板,在系统软件控制下来实现其各项功能.这种仿生六足机器人对各种地面有很强的适应能力,不易陷入松软地面里,且制作成本低,抗干扰能力强、灵敏度高、安全可靠,具有较高的使用价值.【总页数】4页(P128-131)【作者】吴宏岐;郭梦宇【作者单位】宝鸡文理学院电子电气工程系,陕西宝鸡721007【正文语种】中文【中图分类】TP242【相关文献】1.仿生自主运动的六足机器人的设计与实现 [J], 姜奥博; 胡聪; 朱辉; 吴汉斌2.仿生六足机器人的结构设计及运动分析 [J], 郭建; 谢鑫; 蒋品3.气动仿生六足机器人腿部设计与运动实验 [J], 赵云伟; 吴智聪; 刘晓敏; 刘齐4.基于Arduino的仿生六足机器人双形态设计 [J], 方凯旗; 李恒全; 张稳召; 王登丰5.仿生六足机器人机构设计与运动分析 [J], 谷勇霞;吴耀君;江崔颖因版权原因,仅展示原文概要,查看原文内容请购买。
基于STM32的六足机器人控制系统设计
基于STM32的六足机器人控制系统设计伍立春;王茂森;黄顺斌【摘要】基于仿生原理,以STM32F103VET6为核心的控制芯片构建硬件控制系统。
利用无线遥控器使芯片的通用定时器产生18路PWM波控制机器人各个关节的运动,同时通过串口能在上位机实时显示GPS、超声波测距传感器、加速度计、陀螺仪的输出数据,该机器人能严格按三角步态行走,实现诸如直线、转弯、躲避障碍物等行走功能。
实验结果表明,六足机器人的18个关节运动平稳,对复杂运动步态的控制精确,实现了在地面的稳定运动。
%this paper describes the fabrication of a hexapod bionic robot which is control ed bySTM32F103VET6 microprocessor and walks based on bionic principle. In its control system based on wireless remoter, 18-channel PWM wave generated by the timers STM32F103VE76, is used to control robot’ s legs, and the USART of STM32F103VET6 is used to display the output data of GPS, ul-trasonic sensor, accelerometer, gyroscope.This robot is provided with some abilities, such as linear walking, turning, avoiding barri-ers walking etc. The experiments show that free motion control of 18 joints is smooth, the smarter and smal er control system can be used to control complex walking movement precisely and its ground walking objective is atlained..【期刊名称】《机械制造与自动化》【年(卷),期】2014(000)005【总页数】5页(P150-153,161)【关键词】STM32F103VET6;六足机器人;无线遥控;控制系统【作者】伍立春;王茂森;黄顺斌【作者单位】南京理工大学机械工程学院,江苏南京210016;南京理工大学机械工程学院,江苏南京210016;南京理工大学机械工程学院,江苏南京210016【正文语种】中文【中图分类】TP2420 引言移动机器人的发展是一个重要的科研领域,移动机器人可分为车轮式移动机器人、履带式机器人及其仿生技术的运动机器人[1]。
六足机器人毕业设计论文

目录插表清单 (III)插图清单 .................................................................................................................................................................... I V 第一章绪论 . (1)1.1机器人的发展历史 (1)1.2机器人的定义和基本组成 (2)1.2.1机器人的定义 (2)1.2.2机器人的基本组成: (2)1.3移动机器人概述 (3)1.4移动机器人分类 (3)1.5多足机器人的发展现状 (5)1.6本设计的主要工作 (7)1.7本章小结 (7)第二章六足仿生机器人的结构分析及设计 (8)2.1“六足纲”昆虫的运动原理 (8)2.1.1步态的参数描述 (8)2.1.2三角步态运动原理 (9)2.2六足仿生机器人机械结构分析 (9)2.3本章小结 (10)第三章六足仿生机器人的步态分析和设计 (11)3.1六足步行机器人坐标定义 (11)3.2六足机器人的稳定性分析 (13)3.3.1 稳定性分析 (13)3.3.2稳定裕量计算 (13)3.4六足仿生机器人的直线运动步态设计 (15)3.4.1步态规划 (15)3.4.2步态动作分析 (15)3.5“三角步态”定点转弯步态设计 (18)3.6本章小结 (20)第四章六足仿生机器人的控制系统设计 (21)4.1功能分解 (21)4.2控制系统的硬件设计 (22)4.2.1微处理器AT89S52简介 (22)4.2.2 舵机模块设计 (23)4.2.3 避障模块设计 (24)4.3控制系统软件设计 (26)4.3.1单个舵机控制方法 (27)4.3.2多舵机控制 (31)4.3.3六足仿生机器人全方位步态程序设计 (36)4.4软件的抗干扰及可靠性设计 (39)4.5本章小结 (40)第五章软硬件联调 (41)5.1K EIL C51开发系统基本知识 (41)5.2P ROTEUS 仿真软件基本知识 (41)5.2.1 Proteus介绍 (41)5.2.2 Proteus的仿真 (42)5.2.3 Proteus PCB (42)5.3调试结果 (42)5.2相关数值测试 (43)5.3本章小结 (44)第六章结束语 (45)6.1论文总结 (45)6.2论文写作的感想 (45)6.3本章小结 (45)参考文献 (46)致谢辞 (47)表 1-1机器人Fred Delcomyn的参数 (6)表 2-1 本设计机器人相关参数 (9)表 4-1 I/O引脚分配表 (23)表4-2 时基脉冲与舵机角度对应表 (24)表 4-2 探测障碍物的传感器与单片机引脚对应关系表 (25)表 4-3舵机与六足机器人足对应关系表 (36)表 4-4 舵机与单片机端口的对应关系表 (36)表 5-1 关系数值表 (44)图 1-1Fred Delcomyn六足仿生机器人 (6)图 1-2Gengh机器人 (6)图 1-3 DRROB系列高级机器人 (7)图 2-1 本设计的六足仿生机器人 (10)图 2-2机器人腿部实物 (10)图 3-1腿部组图简图 (11)图 3-2 机器人腿部坐标示意图 (12)图 3-3 腿部简图 (12)图 3-4步行机器人任一时刻姿态图 (13)图 3-5三角步态稳定图 (14)图 3-6 六足步态示意图 (15)图 3-7(A、B、C、D)定点转弯步态示意图 (16)图 4-1 基本功能框图 (21)图 4-2 PDIP封装图 (23)图 4-3微动开关示意图 (25)图 4-4 微动开关安装位置图 (25)图 4-5 硬件设计仿真图 (26)图 4-6 系统软件的总体流程 (27)图 4-7 舵盘的位置线性变化图 (28)图 4-8 舵机的控制脉冲图 (28)图 4-9 控制脉冲程序流程图 (29)图 4-10 8路信号舵机控制脉冲图 (31)图 4-11 12个舵机控制流程图 (33)图 4-12 舵机位置示意图 (36)图 4-13 直行程序流程图 (37)图 4-14 转弯程序流程图 (38)图 4-15 避障程序流程图 (39)图 5-1 硬件仿真结果图 (44)第一章绪论机器人的应用越来越广泛,几乎渗透到人们生活的各个领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于单片机的六足机器人控制软件设计--毕业论文常州信息职业技术学院学生毕业设计(论文)报告设计(论文)题目:基于单片机的六足机器人控制毕业设计(论文)任务书一、课题名称:基于单片机的六足机器人控制软件设计二、主要技术指标:前进速度:25cm/s感应障碍物距离:1米反应时间≤0.1s走直线偏差≤±5º舵机控制精度0.75º三、工作内容和要求:1:研究AT89S51单片机的结构,引脚功能,工作原理。
2:研究六足机器人的控制移动,传感器的作用距离,舵机的精度。
3:根据AT89S51的性质和六足机器人的参数,利用KEIL软件编写,调试程序。
4:下载程序到机器人,并根据实际情况对软件进行完善。
5:总结经验,完成设计报告四主要参考文献:1温宗周《单片机原理及接口技术》北京航空航天大学2009.82 彭为、黄科《单片机典型系统设计精讲》电子工业出版社2006.53刘春《自动控制计数》中国劳动社会保障出版社20044李众《单片机技术与项目训练》常州信息职业技术学院2009.7学生(签名)年月日指导教师(签名)年月日教研室主任(签名)年月日系主任(签名)年月日毕业设计(论文)开题报告基于单片机的六足机器人控制软件设计Control software of the six foot robot based on SCM目录摘要Abstract一前言 (1)二单片机的选择 (2)2.1 单片机的介绍 (2)2.2 单片机的应用 (3)2.3 单片机发展趋势 (5)2.4 AT89S5151单片机特点 (6)2.5 AT89S51单片机引脚功能 (7)三六足机器人简介 (8)3.1 六足机器人原理 (18)3.2 控制面板简介 (9)3.3 舵机简介 (11)3.4 传感系统 (12)四六足机器人的控制 (13)4.1 六足机器人控制程序编写 (13)4.2 六足机器人控制程序下载 (23)五结束语 (24)答谢辞参考文献摘要轮式移动机器人是机器人研究领域的一项重要内容.它集机械、电子、检测技术与智能控制于一体。
在各种移动机构中,轮式移动机构最为常见。
轮式移动机构之所以得到广泛的应用。
主要是因为容易控制其移动速度和移动方向。
因此.有必要研制一套完整的轮式机器人系统,并进行相应的运动规划和控制算法研究。
笔者设计和开发了基于5l型单片机的自动巡线轮式机器人控制系统。
基于仿生原理,以51单片机为控制器的核心,制作出了动作灵活、价格低廉以及模块化结构的六足机器人。
该机器人能够严格按三角步态进行行走,实现诸如直线、转弯、躲避障碍物和追踪物体等行走功能。
文中介绍了该机器人三角步态的行走原理、结构组成、控制系统和控制程序。
关键词:单片机控制程序AbstractRound type's moving robot is an important contents that the robot studies realm. it gathers a machine, electronics and examine technique and intelligence control at the integral whole.In various ambulation organization, the round type moves organization the most familiar.The round type moves organization of so get an extensive application.Mainly because easily control it to move speed and ambulation direction.Consequently.there is necessity the round for developing a set of integrity type robot system, and carry on homologous sport programming and control calculate way research.Writer design and development cruise line round the type robot control system according to the auto of 5 l type single slice of machine.This research describes the fabrication of a hexapod bionic robot, controlled by PIC microprocessor, walking based on bionic principle, which has some advantages such as simple, active movements, harmony in walking and etc. This robot has some abilities such as linear walking, turning, avoiding barriers, and tracking object walking etc. The structure, control system and control algorithm of this robot are explained in the paper.Keywords: SCM,Control procedures一、前言在社会迅速发展的今天,单片机的的运用已经渗透到我们生活的每个角落,也似乎很难找到哪个领域没有单片机的足迹。
智能仪表、医疗器械,导弹的导航装置,智能监控、通讯与数据传输,工业自动化过程的实时控制和数据处理,广泛使用的各种智能 IC 卡,汽车的安全保障系统,动控制领域的机器人,数码像机、电视机、全自动洗衣机的控制,电话机以及程控玩具、电子宠物等等,这些都离不开单片机。
所以,单片机的学习、开发与应用将对于现代社会的发展,经济的繁荣,和提高满足人类日益增长的物质文化需求有着至关重要的作用。
也成就了一批又一智能化控制的工程师和科学家。
科技越发达,智能化的东西就越多。
学习单片机是社会发展的必然需求,也是我们现代高级技工所必须要掌握的技能。
二、单片机的选择2.1单片机的简介:一.微型计算机(Single Chip Microcomputer)微型计算机的主要特点:CPU集成于一个芯片中。
单片机(Micro Controller Unit)是把组成微型计算机的各功能部件:CPU、RAM、ROM、定时/计数器、中断控制器、并行和串行接口均集成在一个芯片中。
其一个芯片就构成了一个比较完整的计算机系统。
微型计算机与单片机是微电子领域的两个分支。
微型计算机的特点是运算速度快、存储容量大,适合于信息管理、科学计算等领域;而单片机的特点为体积小、价格低,适合于仪器、设备的控制,常常嵌入到仪器、设备中。
故单片机也称作微控制器(Microcontroller)。
二.单片机的生产与发展(1).单片机的生产:目前世界上单片机的生产公司有上百家,如Intel、Philips、Microchip、Motorola、Siemens、NEC、AMD、Zilog、TI、Atmel等。
但在国内广泛应用的只有Intel 系列和Microchip PIC系列,(2).单片机的发展:第1阶段(1976~1980):单片机发展初级阶段。
集成了8位CPU、RAM、ROM、定时器、并行口(无串行口)等部件,但性能低,寻址范围小(≤4KB),中断系统、定时器也简单。
典型机型:Intel MCS-48系列。
第2阶段(1980~1983):高性能单片机阶段。
此阶段的单片机普遍带有串行口,有多级中断处理系统,多个16位定时/计数器,片内ROM、RAM的容量加大,寻址范围达64KB。
典型机型:Intel MCS-51系列。
第3阶段(1983~80年代末):16位单片机和高性能8位机并行发展阶段。
此阶段Intel推出16位单片机MCS-96系列,其他公司也推出了各种16位单片机。
同时高性能8位单片机的性能更为完善。
第4阶段(90年代):单片机在集成度、功能、速度、可靠性等方面全面发展,如采用Flash ROM,加入了一些特殊功能部件(AD转换器,PWM输出,监视定时器WDT,DMA,调制解调器,通信控制器,浮点运算单元等)。
至今,单片机的性能已比较完善,且专业化的特点很强,为各种应用提供了很大的方便。
2.2单片机的应用单片机由于体积小,价格低,功耗低、控制功能强且控制逻辑可由软件来实现,因此可以很方便地完成由一般数字电路很难实现的控制逻辑。
所以在测控系统,智能仪表,机电一体化产品,智能接口,智能民用产品,机器人等领域得以广泛应用。
1.在智能仪器仪表上的应用(如电压、功率、频率、湿度、温度、流量、速度、厚度、角度、长度、硬度、元素、压力等物理量的测量)只需结合不同类型的传感器即可控制,使得仪表达到数字化。
智能化、微型化(示波器)。
2.在工业控制中的应用(如工厂流水线的智能化管理,电梯智能化控制、各种报警系统,与计算机联网构成二级控制系统等)多用于构成多样的控制系统,数字采集系统。
设计用于实现特定功能,从而在各种电路中进行模块化应用,而不要求使用人员了解其内部结构,在大型电路中,这种模块化应用极大地缩小了体积,简化了电路,降低了损坏、错误率,也方便于更换。
(图)3.在家用电器中的应用(洗衣机、电冰箱、空调机、彩电、及其他音响视频器材,电子秤量设备等)极大的方便了我们的生活。
4.在计算机网络和通信领域中的应用(手机,电话机、小型程控交换机、楼宇自动通信呼叫系统、列车无线通信、集群移动通信,无线电对讲机等)利用单片机的通讯接口可以方便的与计算机进行数据通,为在计算机网络通讯设备间的应用提供了很好的物质条件。
7.单片机在汽车设备领域中的应用(如汽车中的发动机控制器,基于C AN总线的汽车发动机智能电子控制器,GPS导航系统,abs防抱死系统,制动系统等)此外,单片机在工商,金融,科研、教育,国防航空航天等领域都有着十分广泛的用途。
8.多机应用利用单片机的串行接口和并行接口,多个单片机子系统可以彼此进行通信,构成一个网络。
可以构成一个集散式的控制系统,从而控制和处理大量的控制对象和信息,且可以通过并行运算方式来提高处理速度。
总之在单片机系统中,单片机是作为控制中枢,数字电路器件是作为外围电路,二者是相辅相成的。
2.3单片机的发展趋势目前,为了适应各种嵌入式系统的应用需求,单片机将向着高集成度、增强工能。