串行数据通信的结构与功能
AT89S51单片机串行口的内部结构及工作原理介绍
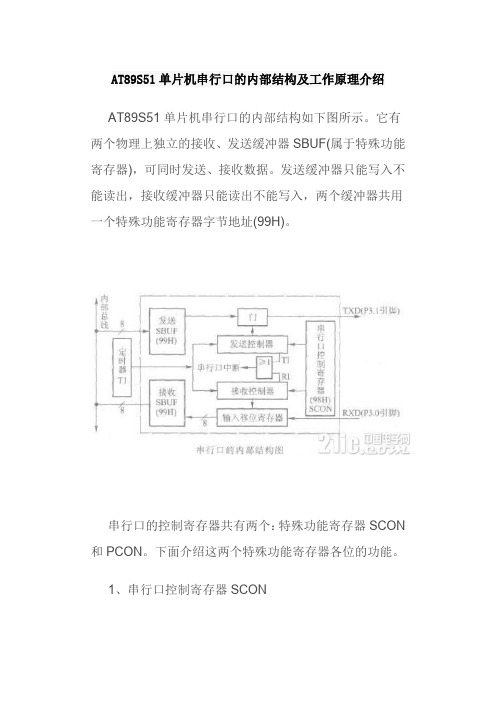
AT89S51单片机串行口的内部结构及工作原理介绍AT89S51单片机串行口的内部结构如下图所示。
它有两个物理上独立的接收、发送缓冲器SBUF(属于特殊功能寄存器),可同时发送、接收数据。
发送缓冲器只能写入不能读出,接收缓冲器只能读出不能写入,两个缓冲器共用一个特殊功能寄存器字节地址(99H)。
串行口的控制寄存器共有两个:特殊功能寄存器SCON 和PCON。
下面介绍这两个特殊功能寄存器各位的功能。
1、串行口控制寄存器SCON串行口控制寄存器SCON,字节地址988H,可位寻址,位地址为98H~9FH。
SCON的格式如下图所示。
下面介绍SCON中各位的功能。
(1) SM0、SMl:串行口4种工作方式选择位。
SM0、SM1两位的编码所对应的4种工作方式见下表。
表串行口的4种工作方式(2) SM2:多机通信控制位。
因为多机通信是在方式2和方式3下进行的,因此SM2位主要用于方式2或方式3中。
当串行口以方式2或方式3接收时,如果SM2=1,则只有当接收到的第9位数据(RB8)为1时,才使RI置l,产生中断请求,并将接收到的前8位数据送人SBUF;当接收到的第9位数据(RB8)为0时,则将接收到的前8位数据丢弃。
而当SM2=0时,则不论第9位数据是l还是0,都将前8位数据送入SBUF中,并使RI置1,产生中断请求。
在方式1时,如果SM2=1,则只有收到有效的停止位时才会激活RI。
在方式0时,SM2必须为0。
(3)REN:允许串行接收位。
由软件置1或清0。
REN=1,允许串行口接收数据。
REN=O,禁止串行口接收数据。
(4)TB8:发送的第9位数据。
在方式2和方式3时,TB8是要发送的第9位数据,其值由软件置l或清O。
在双机串行通信时,TB8一般作为奇偶校验位使用;在多机串行通信中用来表示主机发送的是地址帧还是数据帧,TB8=1为地址帧,TB8=0为数据帧。
(5) RB8:接收的第9位数据。
工作在方式2和方式3时,RB8存放接收到的第9位数据。
串行通信和并行通信区别

这里说的通信是指数字信号。
数字信号是8位二进制数,可以使用信号线传输,一种方案是使用一条数据线按照次序一个位一个位的传送,每传送完8位为一个字节,叫串行通信。
另一种方法是使用8条数据线分别传送8位,一次传送一个字节,叫并行通信。
实际传输有可能不是8位数据而是其它,但原理是相同的。
理论上并行速度比较快,但是串行口线间干扰小,稍远的距离速度不低于并行口。
串行通信和并行通信区别分类:IT知识2006.8.21 17:22 作者:goldenkelly | 评论:3 | 阅读:5948并行通信传输中有多个数据位,同时在两个设备之间传输。
发送设备将这些数据位通过对应的数据线传送给接收设备,还可附加一位数据校验位。
接收设备可同时接收到这些数据,不需要做任何变换就可直接使用。
并行方式主要用于近距离通信。
计算机内的总线结构就是并行通信的例子。
这种方法的优点是传输速度快,处理简单。
串行数据传输时,数据是一位一位地在通信线上传输的,先由具有几位总线的计算机内的发送设备,将几位并行数据经并--串转换硬件转换成串行方式,再逐位经传输线到达接收站的设备中,并在接收端将数据从串行方式重新转换成并行方式,以供接收方使用。
串行数据传输的速度要比并行传输慢得多,但对于覆盖面极其广阔的公用电话系统来说具有更大的现实意义。
串行数据通信的方向性结构有三种,即单工、半双工和全双工。
并行通信是把一个字符的各数位用几条线同时进行传输,传输速度快,信息率高。
但它比串行通信所用的电缆多,故常用在传输距离较短(几米至几十米)、数据传输率较高的场合。
实现并行通信的接口就是并行接口。
并行接口可设计为只作为输入/输出接口,也可设计为既作为输入又作为输出的接口。
它可以用两种方法实现,一种是利用同一个接口中的两个通路,一个作输入通路,一个作输出通路;另一种使用同一个双向通路,既作为输入又作为输出。
连接设备接口有PS/2,PATA,LPT等串行通信是指数据一位一位地依次传输,每一位数据占据一个固定的时间长度。
微机第6章并行通信和串行通信
(3)异步传送:5~8位/字符,时钟速率为通信波 特率的1、16或64倍
(4)可自动产生、检测和处理终止字符, 可产生1、1.5或2位的停止位
(5)波特率在同步方式时为0~64Kbps, 异步方式时为0~19.2Kbps
(6)全双工、双缓冲器发送器和接收器
3. 信号传输方式(续)
常用的调制方式有三种: 调幅、调频和调相,分别如下图所示。
4. 调制解调器
• 调制(Modulating)
– 把数字信号转换为电话线路传送的模拟信号
• 解调(Demodulating)
– 将电话线路的模拟信号转换为数字信号
• 调制解调器MODEM
– 具有调制和解调功能的器件合制在一个装置
与并行相比串行通信的特点
将数据分解成二进制位用一条信号线, 既传送数据信息,又传送控制信息
要求数据格式固定,分为异步和同步数 据格式
串行通信中对信号的逻辑定义与TTL不 兼容,需进行逻辑关系和逻辑电平转换
串行传送信息的速率需要控制,要求双 方约定通信传输的波特率
6.4 可编程并行通信接口芯片8255A
3.端口C的使用较特殊,除工作在方式0作为数据端 口之外,当工作在方式1和方式2时,它的大部分 引脚被用作联络信号,端口C还可以进行按位置位 /复位操作
二.8255A的编程结构
8255A由以下几部分组成:见图 1.三个数据端口A,B,C 这三个端口均可看作是I/O 口,但它们的结构和功能也 稍有不同。 A口:是一个独立的8位I/O 口,它的内部有对数据
字符速率与波特率两者关系
字符速率:每秒钟传输的字符数。 波特率:指单位时间内传送二进制数据的 位数。单位为:b/s
串行通信
3、串行通信工作方式 、
单工 A 发 A 发 收 B 收 广播电台 收音机
半双工
B 收 发
对讲机
全双工
A 发 收
B 收 发
电话机
4、波特率 、
波特率是指每秒钟传送信号的数量,单位为波特(Baud)。 波特率是指每秒钟传送信号的数量,单位为波特(Baud) 是指每秒钟传送信号的数量 波特 例:异步串行通信的数据传送的速率是120字符/秒,而每个字符规 异步串行通信的数据传送的速率是120字符/ 120字符 定包含10位( 1个起始位、8个数据位、1个停止位)数字,则传输 定包含10位 个起始位、 个数据位、 个停止位)数字, 10 波特率为: 波特率为: 120字符/秒× 10位/字符=1200位/秒= 1200bps 10位 字符=1200 =1200位 120字符/ 字符
(P3.1)
去申请中断
1、SBUF:串行发送 / 接收数据缓冲器 99H 、 : 发送 接收 2、SCON:串行口控制寄存器 、 :
SM0 SM1 SM2 REN TB8
98H
RB8 TI RI
3、PCON:特殊功能寄存器 :
SMOD
87H
4、IE:中断允许寄存器 、 :
EA ES
A8H
ET1 EX1 ET0 EX0
如何发送和接收数据 可中断、 可中断、可查询
MCS-51串行口的结构如下图所示: SBUF (发) A 累 加 器 波 特 率 发 生 器
T1
(门)移位寄存器 门 移位寄存器 发送控制器 TI
引脚 TxD
(P3.1)
CPU CPU 内 部
≥1
接收控制器 RI SBUF (收) 引脚 移位寄存器 RxD
微机原理第八章 串行通信及串行接口
1. 可编程串行接口典型结构
✓状态寄存器
✓控制寄存器
✓数据输入寄存器--串行输入/并行 输出移位寄存器
✓数据输出寄存器--并行输入/串行 输出移位寄存器
2. 串行通信基本概念
在串行通信时,数据和联络信号使用同一条信号线 来传送,所以收发双方必须考虑解决如下问题: ❖ 波特率---双方约定以何种速率进行数据的发送和接收 ❖ 帧格式---双方约定采用何种数据格式 ❖ 帧同步---接收方如何得知一批数据的开始和结束 ❖ 位同步--- -接收方如何从位流中正确地采样到位数据 ❖ 数据校验--- -接收方如何判断收到数据的正确性 ❖差错处理---收发出错时如何处理 收发双方必须遵守一些共同的通信协议才能解决上述问题。
串行通信适于长距离、中低速通信
并行通信
将数据的各位同时在多根并行传输线上进行传输。
D0 0
D1 1
D2 0
源
D3 1
D4 D5
0 1
D6 1
D7 0
D0 D1 D2 D3 目 D4 的 D5 D6 D7
数据的各位同时由源到达目的地 → 快 多根数据线 → 短距离(远程费用高)
并行通信适于短距离、高速通信
工作方式下。
(8)错误检测 • 传输错误 • 覆盖错误
二、 接口与系统的连接
从结构上,可把接口分为两个部分,其中和 外设相连的接口结构与具体外设的传输要求及数 据格式相关,因此,各接口的该部分互不相同; 而与系统总线相连的部分,各接口结构类似,一 般都包括:
1. 总线收发器和相应的逻辑电路
2. 联络信号逻辑电路
接收端需要一个时钟来测定每一位的
时间长度。
波特率/位传输率---每秒传输的离散信号 的数目/每秒传输的位数。 波特率因子---
第十二讲 串行通信

位地址
功能
9FH
9EH
9DH
多机通 信控制
9CH
接收 允许
9BH
发送 第9位
9AH
接收 第9位
99H
发送 中断
98H
接收 中断
工作方式 选择
① SM0、SM1:串行口工作方式控制位,两位对应四种工作方式
SM0 SM1 0 0 0 1 1 0 1 1 工作方式 方式0 方式1 方式2 方式3 功能 8位同步移位寄存器 10位UART 11位UART 11位UART 波特率 fosc/12 可变 fosc/64或fosc/32 可变
11.1.5
串行通信的校验
异步通讯时可能会出现帧格式错、超时错等传输错误。差 错校验是保证准确无误通信的关键。
1、奇偶校验 发送数据时,数据位尾随的1位数据为奇偶校验位(1、0)。当 设置为奇校验时,数据中1的个数与校验位1的个数之和应为奇数;
当设置为偶校验时,数据中1的个数与校验位中的1的个数之和应 为偶数。
第十一章 串行接口与应用
11.1 串行通信的基本知识
11.2
MCS-51单片机串行口的结构与
工作方式
11.3
主从式多机通信
11.1 串行通信的基本知识
11.1.1 数据通信的基本概念
1、数据通信 计算机与计算机之间或计算机与其外界的数据传送 通信介质: 电话线、微波中继站、卫星链路和物理电缆 2、通信方式 (1)并行通信 ( 速度快、造价高) (2)串行通信(速度慢、造价低、应用广泛) (3)USB通信()
数据接收
接收数据时,SCON的REN=1。串行口 采样RXD端,当采样到从1向0的状态跳变时, 就认定是接收到起始位。随后在移位脉冲 的控制下,把接收到的数据位移入接收寄存 器中。直到停止位到来之后把停止位送入 RB8中,并置位中断标志位RI,通知CPU从 SBUF取走接收到的一个字符。
第7章 串行通信
第7章 串行通信 7.3.1方式0
当SM0=0、SM1=0时,串行方式选择方式0。这种工作方式实质上 是一种同步移位寄存器方式。其数据传输波特率固定为(1/12)fOSC。数 据由RXD(P3.0)引脚输入或输出,同步移位时钟由TXD(P3.1)引脚输 出。接收/发送的是8位数据,传输时低位在前。帧格式如下:
D7 SD7 D6 SD6 D5 SD5 D4 SD4 D3 SD3 D2 SD2 D1 SD1 D0 SD0
写SBUF(MOV SBUF,A),访问发送数据寄存器; 读SBUF(MOV A,SBUF),访问接收数据寄存器。
第7章 串行通信
7.3 AT89S51单片机的串行口工作方式
AT89S51单片机的串行口工作方式由控制寄存器中的SM0、SM1决 定,具体如表7-1所示: 表7-1 串行口工作方式选择位SM0、SM1 SM0 0 0 1 1 SM1 0 1 0 1 工作方式 方式0 方式1 方式2 方式3 特 点 8位移位寄存器 10位UART 11位UART 11位UART 波 fOSC/12 可变 fOSC/64或fOSC/32 可变 特 率
SM2
9CH
REN
9BH
TB8
9AH
RB8
99H
TI
98H
RI
其中,各位的含义如下: SM0,SM1—串行口工作方式选择位。其功能见表格7-1。 SM2—允许方式2、3中的多处理机通信位。 方式0时,SM2=0。 方式1时,SM2=1,只有接收到有效的停止位,RI才置1。 方式2和方式3时,若SM2=1,如果接收到的第九位数据(RB8)为0, RI置0;如果接收到的第九位数据(RB8)为1,RI置1。这种功能可用于 多处理机通信中。
每当接收移位寄存器左移一位,原写入的“1111 1110”也左移一位。当最 右边的0移到最左边时,标志着接收控制器要进行最后一次移位。在最后一 次移位即将结束时,接收移位寄存器的内容送入接收缓冲器SBUF,然后在 启动接收的第10个机器周期时,清除接收信号,置位RI。
串行通信接口详细

数据的发送和接收分别由两根可以在两个不同的站点同
时发送和接收的传输线进行传送,通信双方都能在同一时刻
进行发送和接收操作,选择的传送方式称为全双工制。
A站
B站
发送器
接收器
接收器
特点:①每一端都有发送器和接收器 ②有二条传送线
应用:交互式应用,远程监测控制
发送器
(三)信号的调制和解调(远程通讯)
计算机的通信是要求传送数字信号,而在进行远程数据通 信时,线路往往是借用现有的公用电话网,但是,电话网是为 音频模拟信号的设计的。一般为300~3400Hz,不适合于数据 信号。
4 5 6 20
2.远距离连接(>15m)
4 5 6 20
1)需用MODEM和专用电话线
2)需用2~9条信号线(在接口与MODEM之间)
计 算 机
接 口
2
TXD RXD RTS
调
┇ CTS DSR
制 解
SG 调
DCD 器
调
制
专用电话线
解 调
器
TXD
RXD 2
RTS
终
CTS DSR ┇
SG
端
DCD
采用MODEM时RS-232信号线的使用
RS-485标准只对接口的电气特性做出规定(只规 定了平衡驱动器和接收器的电特性),而不涉及 接插件、电缆或协议,在此基础上用户可以建立 自己的高层通信协议。
RS-485需要2个终接电阻,其阻值要求等于传输 电缆的特性阻抗。终接电阻接在传输总线的两端。 (大多数双绞线特性阻抗大约在100Ω至120Ω之 间)
3.RS-232C接口信号的定义。见书134表5.2 。 25线:数据线4条(2,3,14,16) 控制线11条(4,5,6,8,12,13,19,20,22,23) 定时信号线3条(15,17,24) 地线2条(1,7) 备用5条(9,10,11,18,25) 未定义
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
反 饋
串行数据通信的结构与功能
测验
回答如下问题:
1. 串行数据通信的其中一个作用是:
A. 通过记录车辆活动对驾驶员进行暗中监视。
B. 只允许信息沿一个方向流动。
C. X 通过数据共享,减少各ECU之间的导线数量。
D. 在车辆上使用更多的导线。
2. 多路控制系统被用于:
A. X 在车身ECU之间共享数据。
B. 在动力传动系ECU之间共享数据。
C. 在车辆上设置更多的导线。
D. 为车辆提供娱乐。
3. 控制器局域网(CAN)被用于:
A. 在车身ECU之间共享数据。
B. 在动力传动系ECU之间共享数据。
C. X 车身ECU与动力传动系ECU之间共享数据。
D. 为车辆提供娱乐。
4. K线路用于在下列部件之间进行数据传送:
A. 在各车身ECU之间。
B. 在动力传动系ECU与车身ECU之间。
C. X 借助DLC,在车辆的ECU与车外诊断工具之间。
D. 在各娱乐ECU之间。
5. 网关有什么功能?
A. 网关只处理一种形式的数据或一种数据传输速度。
B. X 网关将采用某种数据传输速度或数据格式的数据“转换”为另一种。
C. 网关从一个地块跨越到另一个地块。
D. 在联网的车辆上,网关没有任何作用。
6. 失去通信:
A. 将不会设定诊断故障代码。
B. X 如果串行数据回路发生断路,则可能发生。
C. 不会发生在车辆上。
D. 诊断过程中,不应在扫描工具上查看DTC。
7. 各ECU之间的数据共享利用的是:
A. 模拟信号。
B. X 数字信号。
C. 烟雾信号。
D. 可变模拟信号。
8. CAN系统中的各ECU:
A. 始终利用通信回路中提供的所有数据。
B. X 只使用它们操纵系统所必需的数据。
C. 不使用通信回路中所共享的任何数据。
D. 不提供任何功能。
9. B-CAN使用:
A. 单向双线通信线路。
B. 单向单导线通信线路。
C. 双向双导线通信线路。
D. X 双向单导线通信线路。
10. 下面的哪一种ECU构成为B-CAN与F-CAN之间的网关?
A. 空调控制装置
B. X 仪表控制模块
C. MICU
D. ECM/PCM。