天宇御空大疆无人机管理系统-专业版
飞马无人机管家-智航线 航线规划说明书

飞马无人机管家-智航线航线规划C O N T E N T S目录01安装无人机管家02航线规划03工程管理01安装无人机管家1、软件下载打开深圳飞马机器人科技有限公司官网https:///zhcn管家数据处理最低配置要求2.注册登录说明:无人机管家专业版、微信“飞马助手”小程序、起司网账号通用02航线规划1、新建工程进入智航线中,选择新建工程,并输入工程名称(如时间、地点、项目名称)(无人机管家支持全中文命名)新建工程搜索工程复制工程删除工程网络状态高程服务器状态打开工程保存指北针搜索选择工具添加顶点绘制类型导入生成航线测区列表导出注记点导出拷贝删除禁飞区测距工具注记点测区居中地图切换鼠标所在位置坐标2、查找测区位置进入工程后,选择查找功能,找到测区所在地,有如下几种方法:I.直接放大地图查找II.输入经纬度查找(单位:度)III.按照省份、地市、名称查找IV.导入KML文件(KMZ可通过谷歌转换后导入)3、新建多边形测区找到测区位置后,选择绘制类型-多边形,绘制航飞区域,双击结束绘制。
➢拖拽可以移动每个航点➢移动工具可以移动整个测区➢双击测区内部可以更改测区名称,了解测区面积➢双击航点可以得到航点坐标,删除航点➢使用添加顶点工具,可以添加顶点4、新建条带测区找到测区位置后,选择绘制类型-条带,绘制航飞线路,双击结束绘制。
➢拖拽可以移动每个航点➢移动工具可以移动整个条带➢双击测区内部可以更改测区名称,了解测区长度和带宽➢双击航点可以得到航点坐标,删除航点➢使用添加顶点工具,可以添加顶点5、区块拆分依据不同机型的测控半径,对用户绘制的较大范围的测区区块进行拆分,保证飞机安全,方便用户作业。
注:倾斜相机针对【四个点多边形】或者【矩形】不拆分区块,四点多边形提示变成矩形(也可加点变多边形);非【四个点多边形】或者【矩形】区域正常分块。
带状区域不作区块拆分(D1000按照2km距离拆分)5、区块拆分-逻辑机型载荷块状区块拆分边长F1000/2000/200/300P40除外8km V1000/100/200/300all 8kmD200/200s/300/300L五相机除外D1000allD2000五相机除外块状区块拆分机型载荷条带区块拆分边长D1000all 其他-不拆分机型载荷块状区块拆分边长F1000/2000/100/200/300P300All 按续航里程拆分V1000/100/200/300All 不拆分D200/200s/300/300L五相机按续航里程80km 拆分D1000-不拆分D2000五相机按续航里程80km 拆分机型载荷条带区块任务拆分边长F1000/2000/100/200/300P300all按续航里程V1000/100/200/300all 1-25km 可调D200/200s/300/300Lall D2000all Inspire2/Mavic2Pro all 不拆分Phantom4Pro-不拆分条带区块拆分块状任务拆分条带任务拆分D2000/D200条带任务拆分计划改为1-10km 可调在有网络的条件下(高程服务器图标亮),选中要生成航线的测区,使用生成航线功能,选择对应的机型和载荷,自动生成航线,点击右上角保存。
大疆御2无人机参数配置
工作频率
发射功率
FCC:≤26dBm
CE:≤20dBm
SRRC:≤20dBm
MIC:≤20dBm
FCC:≤26dBm
CE:≤14dBm
SRRC:≤26dBm
其它性能
机载内存
8GB
APP控制
支持
尺寸
折叠:214×91×84mm,展开:322×242×84mm
重量
907g
障碍物感知范围
前方,后方,左右:表面有丰富纹理,光照条件充足
(>15 lux,室内日光灯正常照射环境)
上方:表面为漫反射材质且反射率>20%(如墙面,树木,人等)
下方:地面有丰富纹理,光照条件充足
(>15 lux,室内日光灯正常照射环境)
表面为漫反射材质且反射率>20%(如墙面,树木,人等)
遥控器
附带遥控器
视角(FOV):水平40°,垂直70°
后方
精确测距范围:至16m
可探测范围:16至32 m
有效避障速度:飞行速度≤12m/s
视角(FOV):水平60°,垂直77°
上方
精确测距范围:至8m
下方
有效测量高度:
可探测范围:11至22m
左右
可探测范围:至10m
有效避障速度:飞行速度 ≤8m/s
视角(FOV):水平80°,垂直65°
照片最大分辨率
5472×3684
照片拍摄模式
单张拍摄
多张连拍(BURST):3/5张
自动包围曝光(AEB):3/
定时拍摄(间隔:2/3/5/7/10/15/20/30/60秒,RAW:5/7/10/15/20/30/60秒)
图片格式
JPEG/DNG(RAW)
如何用无人机进行直播

大疆无人机直播方法使用无人机进行拍摄的操作十分简便,但把无人机变成空中视角摄像头进行直播就有一些技术难度了。
无人机直播需要直播端入网转发,往往需要添加机载设备或连接服务器代理,普通玩家很难上手。
其实,借助天宇御空app,只需简单4步,就能开启无人机直播,不用换设备写代码,还可以多机联合直播。
支持机型:御Mavic 系列:Mavic 2、Mavic Air、Mavic Pro、Mavic 2 行业版精灵Phantom 系列:Phantom 4、Phantom 4 Advanced(除Advanced+)、Phantom 4 Pro (除Pro+)、Phantom 4 RTK(SDK遥控器版)、Phantom 3 Pro、Phantom 3 SE、Phantom 3 A悟Inspire 系列:Inspire 1、Inspire 2经纬Matrice 系列:M200 V2、M210 V2、M210 RTK V2、M600 Pro第一步:获取账号下载APP电脑打开天宇御空官网,扫描网页下方二维码下载APP。
第二步:后台设置获取免费账号后,成为企业管理员,登录天宇御空网站,可在【人员设置】中为企业添加新用户,同一企业下账号可用于相互查看直播视频和多机飞行直播。
注意:同一账号不可同时用于飞行和远程观看直播。
第三步:连接飞机开始飞行使用USB线连接手机和无人机遥控器,打开天宇御空APP,开启手机相关权限,即可开始使用天宇御空APP操控飞行。
点击【我要飞行】按钮,选择自由模式或航线模式飞行,航线模式可绘制和导入航线。
开始飞行后,网页和手机即可查看飞行视频和飞行信息,飞行操作与大疆操作习惯相同。
飞控界面右下控制栏为飞行控制按钮组(图示为航线模式)右侧三个按钮为直播控制:按钮1开关按钮开启和关闭任务,开启任务后可开始飞行和直播;按钮2图标用于开启和关闭直播,开启任务后,可选择开启直播,显示当前直播信号状态;按钮3按钮用于开启和关闭飞手音频收录。
大疆精灵3专业版使用说明
大疆精灵3专业版使用说明一、组装飞行器与准备工作................................................................ 错误!未定义书签。
二、遥控器的使用.................................................................................. 错误!未定义书签。
三、DJI GO app界面 ............................................................................ 错误!未定义书签。
四、控制飞行器....................................................................................... 错误!未定义书签。
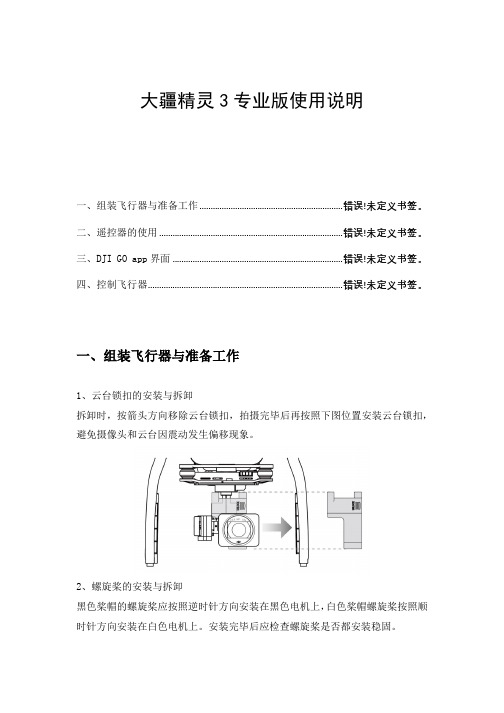
一、组装飞行器与准备工作1、云台锁扣的安装与拆卸拆卸时,按箭头方向移除云台锁扣,拍摄完毕后再按照下图位置安装云台锁扣,避免摄像头和云台因震动发生偏移现象。
2、螺旋桨的安装与拆卸黑色桨帽的螺旋桨应按照逆时针方向安装在黑色电机上,白色桨帽螺旋桨按照顺时针方向安装在白色电机上。
安装完毕后应检查螺旋桨是否都安装稳固。
3、智能电池的安装与拔出将电池以正确的方向推入电池仓,直到“咔”的一声,以确保电池卡紧在电池仓内。
如果电池没有卡紧,有可能导致电源接触不良,可能会影响飞行的安全性,甚至无法起飞。
在拔出电池时,应用手指紧按锁扣往外用力拔出,新机器可能会比较费力。
4、遥控器与移动设备的安装首先将遥控器的天线和移动设备支架展开,按下移动设备支架侧边的按键以伸展支架,放置移动设备后调整支架确保夹紧移动设备。
再使用USB数据线连接移动设备与遥控器后方的USB接口,打开DJI GO app。
二、遥控器的使用遥控器根据习惯方式分为美国手和日本手,可在DJI GO app内进行设置,大疆精灵3专业版的出场默认设置为美国手,也建议大家使用美国手。
策评室丨沁入心底的美好MAVIC 2 专业版测评

策评室丨沁入心底的美好MAVIC 2 专业版测评作者:东子寒来源:《数码影像时代》 2018年第9期从西五环出发,一路向西60 公里。
沿109 国道深入北京门头沟腹地,在这个季节,一切美景尽收眼底。
站在山下时,我将它升空,盘旋,那种不曾看到的视角像一股暖流沁入心底。
而它也将最真实的一切永久保留,定格瞬间美好。
它就是今天的主角——MAVIC 2 专业版。
8 月23 日,大疆创新在北美召开发布会。
发布了新款消费级无人机MAVIC 2 专业版和变焦版。
而我也第一时间拿到了MAVIC 2 专业版,这款无人机最大的亮点就是搭配了哈苏相机和更加专业的视频拍摄功能。
在实际拍摄体验中,视频的原始色彩还原度很高。
全自动模式下也能完成准确的画面获取,这对于航拍新手来说很重要。
1 英寸CMOS,HDR 视频则让拍摄下美景,变得更加简单。
4K 和Dlog-M 是我这次拍摄中主要使用的功能,4K 分辨率下虽然很“吃卡”,但在画质与可调节度上表现的很好。
Log 模式无论在地面端还是天空端,都是视频创作者的首选。
一是因为Log 视频在调色流程上不再复杂,二是能够最大程度上记录细节信息。
大疆在消费级无人机上配备了Dlog-M, 也让用户在视频拍摄上有了更高的追求,和实现追求的可能。
发布会后,“年轻人的第一款哈苏”不胫而走。
一切美好之后,每个创作者还要回归创作本身。
用更加强大的工具,创作出更加伟大的影片。
Dlog-M 的加入,让对影像有所追求的影像人有了新的选择。
现在市面上很多主机厂商都在自家的机器内植入了Log 曲线,虽然各有各的叫法,但都基于一定的原理和希望呈现的方式。
大疆的Dlog 早在Inspire2+X5 上已经出现,当时ProRes 和CinemaDNG 两种格式的加入,已经让专业航拍感受到了淋漓尽致的爽快。
而Dlog 更是给用户提供了一个向专业过渡的好方法,这次在Mavic 2 专业版拍摄时,我也第一时间体验的Dlog-M 的魅力。
大疆御操作指南

大疆御操作指南作为一位无人机爱好者,大疆御无疑是我最钟爱的一款无人机之一。
它具备高品质的飞行体验以及强大的拍摄能力,不仅适用于专业影像制作,也很适合日常生活中的拍摄需求。
然而,如果你是一个新手,或者没有得到过足够的操作技巧指导,那么你很有可能会在操作过程中遇到一些问题。
在这篇文章中,我将为初学者们提供一些有关大疆御的基础操作技巧和小贴士,帮助他们更好地享受这个神奇的飞行工具。
1,准备工作在飞行之前,一定要对你的无人机进行全面的检查,确保它的状态良好,无任何重要构件丢失或破损。
同时,你还需要准备好一些附件和备用电池,以免飞行过程中出现电力不足情况。
2,起飞和着陆起飞和着陆过程是无人机的两个最关键的时刻。
在起飞之前,你需要将无人机平放在地面上,然后在APP上点击“Take off”,自动起飞过程会随后进行。
在着陆之前,你需要确保无人机位于一个安全、开阔的地方,并在APP上点击“Landing”,无人机会自动降落。
3,飞行注意事项在飞行过程中,请务必注意以下几点:(1)飞行高度:在飞行期间,请保持足够的飞行高度,以避免飞机碰撞到物体。
(2)wind速度:在有风的天气里,请务必关注风速,并保持足够的飞行高度,以防止飞机失控。
(3)飞行范围:在飞翔过程中,需要注意飞机的飞行范围,以避免无人机掉落在不安全的区域或进入受限制的区域。
(4)飞行时间:每一个备用电池都有不同的飞行时间,当电量低于10%时请及时返回,以确保无人机能够降落安全。
4,拍摄技巧大疆御可以拍摄出极具影响力和美感的画面。
在拍摄过程中,你需要注意以下几点:(1)摄像角度:在飞行过程中,拍摄摄像机的角度是非常重要的。
尝试在不同高度和角度下进行拍摄,以获得更好的拍摄效果。
(2)模式选择:大疆御提供了多种模式,如跟随模式、手动模式、自主飞行模式等。
不同的模式可供不同的拍摄需求,因此在拍摄时要根据实际情况选择最适合的模式。
(3)ISO和快门速度:在拍摄过程中,要通过调整ISO和快门速度来获取最佳的照片质量。
DJI Assistant 2 (消费机系列) 发布记录 V2
主要更新【DJI Mavic 3 Pro】1.支持固件升级功能。
2.支持限飞数据升级功能。
3.支持日志导出功能。
4.支持U盘模式功能。
主要更新【DJI Goggles Integra】1. 支持激活功能2. 支持固件升级功能。
3. 支持日志导出功能。
【DJI RC Motion 2】1. 支持激活功能2. 支持固件升级功能。
3. 支持日志导出功能。
主要更新【DJI Mini 2 SE】1.支持固件升级功能。
2.支持限飞数据升级功能。
3.支持日志导出功能。
主要更新【DJI Mini 3】1.支持固件升级功能。
2.支持限飞数据升级功能。
3.支持日志导出功能。
主要更新【DJI O3 Air Unit】1.支持激活功能2.支持固件升级功能。
3.支持日志导出功能。
4.支持相机标定功能。
主要更新【DJI Mavic 3 Classic】1.支持固件升级功能。
2.支持限飞数据升级功能。
3.支持日志导出功能。
主要更新【DJI Avata】1.支持激活功能2.支持固件升级功能。
3.支持限飞数据升级功能。
4.支持日志导出功能。
5.支持视觉校准功能。
【DJI Goggles 2】1.支持激活功能2.支持固件升级功能。
2.支持日志导出功能。
【DJI FPV 飞行器】1.支持激活功能。
【DJI FPV 遥控器2】1.支持激活功能。
【DJI RC-M1】1.支持激活功能。
主要更新【DJI Mini 3 Pro】1.支持固件升级功能。
2.支持限飞数据升级功能。
3.支持日志导出功能。
4.支持视觉校准功能。
【DJI RC】1.支持固件升级功能。
2.支持日志导出功能。
主要更新【DJI MAVIC 3】1.新增U盘模式功能。
主要更新【DJI MAVIC 3 & DJI RC PRO】1.修复部分问题,提升稳定性。
主要更新【DJI MAVIC 3】1. 日志导出功能优化。
【DJI AIR 2S】1.兼容M1芯片的Mac系统,用于升级固件版本。
飞马机器人 无人机管家 数据处理软件说明书
无人机管家数据处理软件说明书编制:深圳飞马机器人科技有限公司版本号:V0.1日期:2019-3-26目录1.概述 (1)2.配置与权限 (1)软件权限 (1)配置要求 (2)3.智检图 (2)3.1.功能说明 (2)3.2.智检图流程 (11)4.智理图 (26)4.1.GPS处理 (27)4.2.图像处理 (44)4.3.实用工具 (59)4.4.图像批处理 (73)4.5.常见问题 (73)5.智拼图 (75)5.1.功能说明 (75)5.2.快拼流程 (86)1.概述本文档主要讲述【无人机管家】软件各模块功能应用和对应不同飞机、不同需求所涉及的操作说明,包含功能介绍、数据获取后数据质检、数据预处理、数据快拼处理流程。
【无人机管家】是无人机数据获取、处理、展示、管理以及无人机维护的一站式智能GIS系统,支持固定翼、旋翼、复合翼等种类丰富的飞行平台,满足各种应用需求的航线模式,支持真三维地形数据的精准三维航线规划、三维实时飞行监控、快速飞行质检,具有功能多样化的数据预处理工具箱,支持稳健的精度控制和自动成图、丰富的4D和三维产品生产,以及无人机可视化监控中心,提供系统升级、智能维护、信息推送等云服务。
【无人机管家】软件主要模块分别为:【智检图】(数据检查)、【智理图】(数据预处理)、【智拼图】(DSM+TDOM、DOM、三维数据生产)、【智激光】(LIDAR数据生产)。
无人机管家除支持飞马系列获取的数据外,还支持大疆精灵4rtk、御2、等相机数据。
2.配置与权限软件功能权限软件权限配置:最低配置系统支持Widows7SP1(64)、Windows8(64)、Windows10(64)CPU Intel双核处理器内存RAM(8GB)显卡NVIDIA显卡、显存1GB及以上推荐配置系统支持Widows7SP1(64)、Windows8(64)、Windows10(64)CPU Intel Core i7处理器及以上内存64G、128G显卡NVIDIA显卡1080ti、显存2GB及以上配置要求管家界面3.智检图【智检图】是专业用于航飞质量现场检查及评估分析的自动化软件、可以快速获得航飞质量报告、提高无人机数据质检工序的效率及后期处理的可靠性。
无人机传输系统用户手册说明书
多旋翼专业级无人机使用手册专注应急通信,持续引领创新版权所有不得复制目录一、免责声明 (3)二、无人机—飞行器 (4)2.1、无人机组成 (4)2.2、无人机接口图示 (6)2.3、挂载安装 (7)三、无人机—智能遥控器 (8)四、挂载介绍 (10)4.1无人机—变焦云台(30倍) (11)4.2无人机—机载喊话器 (14)4.3无人机—抛投器 (19)4.4无人机—探照灯 (21)4.5无人机—锂聚合物电池及电池充电器 (23)五、智能遥控器使用说明 (28)六、飞行安全 (36)七、起飞准备 (38)7.1.静态检查 (38)7.2.安装电池及起落架 (38)7.3.安装挂载 (40)7.4.安装机臂 (40)7.5.参数检查 (41)7.6.挂载控制 (45)八、无人机起飞 (46)九、飞机降落 (48)十、常见问题解答 (48)十一、法律法规 (49)售后服务 (50)一、免责声明危险首先感谢您使用慧明捷科技有限公司无人机设备。
它融合了高科技精华、外观精美、图传覆盖面积广。
希望它能给您的工作带来无限的便捷。
在使用无人机图传设备前,请仔细阅读本须知,一旦使用即被视为本声明内部已经全部认可与接受。
请严格遵守用户手册安装和使用该产品。
特别声明:由于本产品新手操作,十分危险。
飞行员必须经过慧明捷科技有限公司的培训,并且在考核通过之后才能操作。
在未通过考核便擅自操作的情况下所造成的损害或损伤,慧明捷科技有限公司将不承担相应的损失及赔偿责任。
警告请把电器部件放在儿童触及范围之外;确保飞行器飞行时远离人群及危险物品,建议您在专用的飞行场地飞行;切勿在饮酒、疲劳或其他精神状态不佳的情况下进行任何操作;请严格按产品手册进行操作;飞行前请确保供电系统及其他功能模块连接正确,否则可能造成设备的烧毁;遥控器通道校准、固件升级、参数设置前请关闭动力电源或取下螺旋桨,防止电机突然高速旋转;切勿在恶劣环境下飞行;请勿改变机架的结构,如改变,后果自负1.本产品为特殊控制物项,用户将为使用本产品的一切行为负全部责任,对于直接或间接使用本产品造成的后果厂家不承担任何责任。
大疆创新裁判系统用户手册说明书
2 © 2022 大疆创新 版权所有阅读提示符号说明 禁止 重要注意事项 操作、使用提示 词汇解释、参考信息前置参考阅读1. 《裁判系统用户手册》2. 裁判系统各模块说明书建议用户首先阅读裁判系统各模块说明书,了解裁判系统各模块的功能以及安装方式,正确安装裁判系统的各模块,再通过《裁判系统用户手册》了解整个裁判系统的功能。
修改日志本手册将在每赛季根据实际情况更新两次。
手册发布后,根据规定日期生效。
日期版本修改记录生效日期 2022.03.29 V1.21. 增加第三方成品模组的限制2. 删除飞镖“R ”标朝上的限制2022.03.28 2022.01.11 V1.11. 明确底盘功率的定义2. 修订机器人整机成品及开源机器人使用规范2022.01.11 2021.10.15V1.0 首次发布 2021.10.15© 2022 大疆创新 版权所有3目录阅读提示 (2)符号说明 (2)前置参考阅读 (2)修改日志 .................................................................................................................................................. 2 1.前言 ................................................................................................................................................ 10 2.技术规范 ........................................................................................................................................ 11 2.1 通用技术规范 .. (11)2.1.1能源 .................................................................................................................................. 11 2.1.2无线电 ............................................................................................................................. 12 2.1.3光学手段 .......................................................................................................................... 12 2.1.4视觉特征 .......................................................................................................................... 13 2.1.5机器人编号 ...................................................................................................................... 13 2.1.6外观设计 .......................................................................................................................... 14 2.1.7发射机构 .......................................................................................................................... 15 2.1.8自定义控制器 .................................................................................................................. 15 2.1.9其它 ................................................................................................................................. 16 2.2 机器人整机成品及开源机器人使用规范 . (17)2.2.1充分再设计 ...................................................................................................................... 17 2.2.2非充分再设计 .................................................................................................................. 18 2.2.3 无效再设计 . (18)2.3 机器人技术规范 (19)2.3.1英雄机器人 ...................................................................................................................... 19 2.3.2工程机器人 ...................................................................................................................... 20 2.3.3步兵机器人 ...................................................................................................................... 22 2.3.4空中机器人 ...................................................................................................................... 24 2.3.5哨兵机器人 ...................................................................................................................... 26 2.3.6飞镖系统 .......................................................................................................................... 27 2.3.7 雷达 ................................................................................................................................. 31 3.裁判系统安装规范 .......................................................................................................................... 33 3.1概述 ........................................................................................................................................ 33 3.2机器人裁判系统配置 ............................................................................................................... 34 3.3 主控模块安装规范 (35)3.3.1 安装步骤 (36)3.3.2安装要求 (37)3.4电源管理模块安装规范 (38)3.4.1安装步骤 (39)3.4.2安装要求 (41)3.5灯条模块安装规范 (43)3.5.1安装步骤 (44)3.5.2安装要求 (45)3.6装甲模块安装规范 (46)3.6.1通用 (48)3.6.2安装步骤 (51)3.6.3安装要求 (56)3.6.4ID编号设置 (58)3.7测速模块安装规范 (59)3.7.1安装步骤 (60)3.7.2安装要求 (65)3.8场地交互模块安装规范 (66)3.8.1安装步骤 (67)3.8.2安装要求 (68)3.8.3场地交互模块卡 (68)3.9相机图传模块(发送端)安装规范 (68)3.9.1安装步骤 (69)3.9.2安装要求 (70)3.10相机图传模块(接收端)安装规范 (70)3.10.1安装要求 (71)3.11定位模块安装规范 (71)3.11.1安装步骤 (72)3.11.2安装要求 (72)3.1217mm荧光弹丸充能装置安装规范 (73)3.12.1安装步骤 (74)3.12.2安装要求 (75)3.12.3自制紫外灯板指导及要求 (76)3.13超级电容管理模块安装规范 (76)3.13.1安装步骤 (76)3.13.2安装要求 (78)附录一17mm 测速模块转接块工程图 (79)4 © 2022 大疆创新版权所有© 2022 大疆创新 版权所有5 附录二 参考图纸 (80)表目录表2-1 控制方式汇总 (12)表2-2 自定义控制器制作参数说明 (15)表2-3 英雄机器人制作参数说明 (19)表2-4 工程机器人制作参数说明 (20)表2-5 步兵机器人制作参数说明 (22)表2-6 空中机器人制作参数说明 (24)表2-7 哨兵机器人制作参数说明 (26)表2-8 飞镖制作参数说明 (28)表2-9 飞镖发射架制作参数说明 (28)表2-10 雷达运算平台端制作参数说明 (31)表2-11 雷达传感器端参数说明 (31)表3-1 裁判系统组成模块 (33)表3-2 机器人裁判系统模块配置 (34)表3-3 电源管理模块接口对照 (42)6 © 2022 大疆创新版权所有© 2022 大疆创新 版权所有7图目录图 2-1 平衡步兵机器人示意图 (23)图 2-2 航行外观灯有效区域 (26)图 2-3 飞镖触发装置示意图 (29)图 2-4 飞镖触发装置遮挡示意图 (30)图 2-5 飞镖触发装置内部空腔遮挡示意图 (30)图 3-1 主控模块示意图 (36)图 3-2 主控模块安装示意图 (36)图 3-3 主控模块连线示意图 (37)图 3-4 主控模块安装位置示意图 (38)图 3-5 电源管理模块示意图 (39)图 3-6 电源管理模块安装示意图 (40)图 3-7 电源管理模块接口示意图 (41)图 3-8 电源管理模块接线示意图 (41)图 3-9 灯条模块示意图 (44)图 3-10 灯条模块安装示意图 (45)图 3-11 灯条模块底部示意图 (45)图 3-12 灯条模块接线示意图 (45)图 3-13 哨兵机器人灯条模块示意图 (46)图 3-14 指定装甲支撑架示意图 (47)图 3-15 小装甲模块示意图 (47)图 3-16 大装甲模块示意图 (48)图 3-17 机器人坐标系示意图 (48)图 3-18 机器人不同底盘形态X 轴示意图 (49)图 3-19 装甲模块受力示意图 (50)图 3-20 机器人保护示意图 (51)图 3-21 底盘预留孔位 (52)图 3-22 装甲支撑架安装示意图 (52)图 3-23 装甲模块安装示意图 (53)图 3-24 装甲模块连线示意图 (53)图 3-25 底盘预留孔位示意图 (54)图 3-26 装甲支撑架安装示意图 (54)图 3-27 装甲模块安装示意图 (55)图 3-28 底盘预留孔位示意图 (55)图3-29 哨兵支撑架安装示意图 (56)图3-30 哨兵装甲安装示意图 (56)图3-31 地面机器人装甲模块ID设置示意图 (59)图3-32 17mm测速模块示意图 (60)图3-33 42mm测速模块示意图 (60)图3-34 17mm枪管示意图 (61)图3-35 测速模块安装示意图 (62)图3-36 17mm转接块零件示意图 (62)图3-37 17mm转接块固定方式示意图 (63)图3-38 17mm短枪管安装示意图 (64)图3-39 42mm枪管示意图 (65)图3-40 测速模块安装规范示意图 (66)图3-41 场地交互模块示意图 (67)图3-42 场地交互模块连线示意图 (67)图3-43 场地交互模块安装示意图 (67)图3-44 场地交互模块卡示意图 (68)图3-45 相机图传模块(发送端)示意图 (69)图3-46 相机图传模块(发送端)安装示意图 (70)图3-47 相机图传模块(接收端)示意图 (71)图3-48 定位模块示意图 (71)图3-49 定位模块安装示意图 (72)图3-50 定位模块连线示意图 (72)图3-51 定位模块安装示意图 (73)图3-52 17mm荧光弹丸充能装置示意图 (74)图3-53 紫外灯板安装示意图 (75)图3-54 电容管理模块接线示意图 (77)8 © 2022 大疆创新版权所有© 2022 大疆创新 版权所有9附录图目录附录图 1 工程机器人装甲贴纸 - 2号 (80)附录图 2 步兵机器人装甲贴纸 - 3号 (80)附录图 3 步兵机器人装甲贴纸 - 4号 (81)附录图 4 步兵机器人装甲贴纸 - 5号 (81)附录图 5 英雄机器人装甲贴纸 - 1号 (82)附录图 6 平衡步兵机器人装甲贴纸 - 3号 (82)附录图 7 平衡步兵机器人装甲贴纸 - 4号 (83)附录图 8 平衡步兵机器人装甲贴纸 - 5号 (83)附录图 9 前哨站装甲贴纸 (84)附录图 10 基地小装甲贴纸 (84)附录图 11 哨兵机器人装甲贴纸 (85)附录图 12 基地大装甲贴纸 (85)1. 前言RoboMaster参赛队伍需自行研发和制作参赛机器人,参赛机器人需满足本文档描述的所有规范,否则无法通过赛前检录。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
精灵系列
支持: 1. 精灵 Phantom 4
Pro( 除精灵 4 Pro+) 2. 精灵 Phantom 4 3. 精灵 Phantom 4 Advanced(除精灵 4 Advanced+) 4. 精灵 Phantom 4 RTK(SDK遥控器版 本) 5. 精灵3 SE 6. 精灵3 Pro 7. 精灵3A
规划航线 自主飞行
第三方航线 批量导入
同DJI GO 界面相同
安卓系统
多机直播
任务管理 统计分析
实时航迹
WEB端飞行管理系统
实时在线多机直播系统,飞行数据管理 系统
WEB端飞行管理系统
兼容第三方软件航线导入,人员设备管 理系统
KML
KML模板管理
支持第三方软件 航线导入
实时飞行管控系统
实时在线飞行报备,保证飞行合规
设备故障,异物检查,树障巡检
天宇御空+油田巡检
厂区道路巡检,偷油漏油巡查,管道施 工巡检
天宇御空+环保水务
全流域实时监控,污空+电力巡检
检测杆塔异物,自动检测部件缺损
天宇御空+工地巡检
施工进度管理,安全监管,物料堆放 监管
天宇御空+应急救灾
悟系列
支持: 1. 悟Inspire 1 2. 悟inspire 2
M200系列
支持: 1. 经纬M200 V2 2. 经纬M210 V2 3. 经纬M210 RTK V2
M600Pro
支持: 1. 经纬M600 Pro
云平台智能AI算法,跨平台实时联动
支持智能算法多场景辅助分析
特定目标识别与定位
·车辆 ·机械 ·船只 ·建筑 ·人员 ·火情
实时大图快拼
变化检测与卷帘分析
·原油泄漏 ·地质滑坡 ·违章施工 ·水体污染
运动目标检测与跟踪
·拥堵路况 ·险情拼图
天宇御空+交通路桥
道路拥堵,车辆违章,事故现场侦查
天宇御空+通信基站检测
全面掌控灾情现场,及时制定救 灾方案
天宇御空+警用安防
辖区安全巡视,大型活动安保
天宇御空+风电巡检
检查风电设备运行情况,叶片裂 纹
天宇御空+城市管理
违法建筑巡查,城市规划,城市 变化勘察
天宇御空+调查取证
乱搭乱建取证,污水排放取证
支持的大疆机型
御系列
支持: 1. 御Mavic 2 2. 御Mavic Air 3. 御Mavic Pro
天宇御空大疆无人机管理系统
支持大疆主流机型,自动航线,实时 直播系统
航线规划 多路视频直播 智能AI “云端”管理
私有云部署 公有云服务
4G/5G
天宇御空云计算中心
4G/5G
AI处理
地理信息 系统
多端直播
合规保障
APP端飞控管理系统
自由模式和航迹模式,移动实时直播系 统,支持KML航线导入
KML