采用Smith预估补偿的时滞系统PI控制器的设计
数字PID的补偿算法的设计
数字PID调节器纯滞后的补偿算法设计摘要对于无滞后或滞后比较小的系统,通常采用PID控制。
对于纯滞后系统,PID控制效果并不好,需要另加补偿,因此提出了Smith预估补偿控制系统。
而 Smith 预估算法则在模型匹配时具有好的性能指标 ,但是由于这种算法严重依赖模型的精确匹配 ,而在实际中这是很难做到的。
本文研究的重点是设计与实现纯滞后系统的控制过程的控制规律和控制算法,并比较传统的数字PID控制算法与加入Smith预估器的控制算法的不同。
具体讨论了纯滞后系统的Smith预估器的实现方法,着重对这种控制算法进行了较深入的讨论,而且还通过仿真对设计和改进的结果进行了分析。
仿真实验中,若采用PID控制算法,系统会出现较大的超调量,采用史密斯预估器补偿控制超调量大大较少,系统更加稳定。
关键字:Matlab;纯滞后;数字PID;Smith 预估控制器;SimulinkAbstractFor the system with no or less delay, usually adopts PID control. For pure delay system, PID control effect is not good, need additional compensation, so the proposed Smith predictor control system. But Smith pre estimation algorithm has good performance index in the model matching, but because an exact match this algorithm heavily depends on the model, but in fact it is very difficult to do.This paper is focused on the control and implementation of rules and the control algorithm to control the process of pure lag system design, and compare the traditional digital PID control algorithm with the addition of Smith predictive control algorithm for different. Discussed the specific time delay system Smith prediction method is, focuses on the control algorithm are discussed in depth, but also analyzed through simulation design and improvement of the results. The simulation experiment, if the PID control algorithm, the system will have a large overshoot, Smith predictor is used to compensate control overshoot is greatly reduced, the system more stable.Keywords: Matlab; delay; digital PID; Smith controller; Simulink目录1.设计的目的及意义 (1)2.纯滞后系统概念 (1)2.1时滞的描述 (1)2.1.1纯滞后产生的主要原因 (2)2.1.2具有纯滞后对象的传递函数 (2)2.2纯滞后系统的控制算法 (2)2.2.1常规控制方法 (2)2.2.2智能控制方法 (3)3.数字PID控制理论及系统仿真 (3)3.1 PID控制算法 (3)3.1.1 模拟PID调节器 (3)3.1.2 数字PID控制算法 (4)3.2 PID的参数整定 (5)3.3 PID控制器的仿真 (8)4.Smith预估控制理论及系统仿真 (9)4.1 Smith预估控制理论 (9)4.1.1Smith预估控制的基本原理 (9)4.1.2 Smith预估器 (10)4.1.3纯滞后补偿控制算法步骤 (11)4.2 Smith控制系统仿真研究 (12)4.2.1控制方案和仿真框图的建立 (12)5.控制系统仿真比较分析 (13)6.总结 (14)参考文献 (15)1.设计的目的及意义在工业控制领域,数字PID控制器获得了广泛的应用。
软件设计-Smith纯滞后补偿PID控制算法
软件设计-Smith纯滞后补偿PID控制算法⼀、题⽬题⽬5:以中等纯度的精馏塔为研究对象,考虑到不等分⼦溢流的影响和⾮理想的汽液平衡,可以得到塔顶产品轻组分含量Y 与回流量L 之间的传递函数为:s e s s s s L s Y 12)15.17)(13.28()19.0(4.3)()(-?+++= 控制要求:1、采⽤Smith 纯滞后补偿PID 控制算法将塔顶轻组分含量控制在0.99。
2、采⽤继电法整定PID 参数。
3、整定效果验证:当被控过程参数时变时,如滞后时间由12→24,开环增益由3.4→6时,讨论PID 控制的响应速度及鲁棒性问题,考察当系统参数发⽣改变时,上述PID 参数是否选取合适。
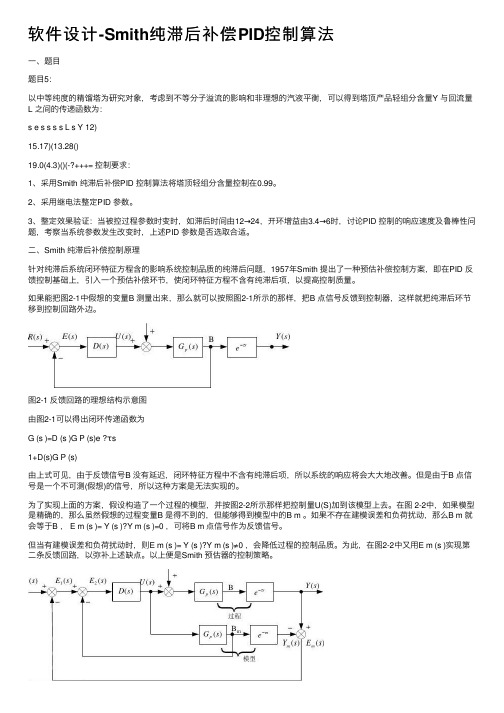
⼆、Smith 纯滞后补偿控制原理针对纯滞后系统闭环特征⽅程含的影响系统控制品质的纯滞后问题,1957年Smith 提出了⼀种预估补偿控制⽅案,即在PID 反馈控制基础上,引⼊⼀个预估补偿环节,使闭环特征⽅程不含有纯滞后项,以提⾼控制质量。
如果能把图2-1中假想的变量B 测量出来,那么就可以按照图2-1所⽰的那样,把B 点信号反馈到控制器,这样就把纯滞后环节移到控制回路外边。
图2-1 反馈回路的理想结构⽰意图由图2-1可以得出闭环传递函数为G (s )=D (s )G P (s)e ?τs1+D(s)G P (s)由上式可见,由于反馈信号B 没有延迟,闭环特征⽅程中不含有纯滞后项,所以系统的响应将会⼤⼤地改善。
但是由于B 点信号是⼀个不可测(假想)的信号,所以这种⽅案是⽆法实现的。
为了实现上⾯的⽅案,假设构造了⼀个过程的模型,并按图2-2所⽰那样把控制量U(S)加到该模型上去。
在图 2-2中,如果模型是精确的,那么虽然假想的过程变量B 是得不到的,但能够得到模型中的B m 。
如果不存在建模误差和负荷扰动,那么B m 就会等于B , E m (s )= Y (s )?Y m (s )=0 ,可将B m 点信号作为反馈信号。
Smith预估器控制设计【计算机课程设计专用】
b)电流输出,稳定时间为1s
c)可双缓冲输入,单缓冲输入或直接数字输入,单一电源供电
DA转换器的电路设计:
(1)参考电压选择+5V,直接与供电电源相连。
(2)选择DAC为单缓冲方式,即输入寄存器工作于受控状态,DAC寄存器处于直通状态,由DAC0832的引脚特性,将DAC0832的引脚接发如下:
uchar UK0,UK1;//分别为k,k-1时刻的控制器的输出
uchar EK0,EK1;//分别为k,k-1时刻的AD的输入
uint i=0;
uchar in0=0; //系统输入采样
void delay(uchar time)//延时
{
uchar i,j;
for(i=0;i<time;i++)
OE=0;
return value;
}
main()
{
C1K0=C1K1=C1K2=C1K3=C1K4=C1K5=C1K6=C1K7=C1K8 =C1K9=C1K10=C1K11=C1K12=0; //系统初始化
UK0=UK1=0;
CK1=0;
EK1=0;
wr=0;
rd=0;
ST=0;
OE=0;
TMOD=0X01; //定时器0控制方式1,16位的定时器计数器
EK1=EK0;
DAC08=0X58;
TH0=0X9E; //延时50ms
EA=1;
}
六、设计工作总结
采用带Smith预估器控制的设计与传统的PID控制设计相比,大大的减少了响应曲线的超调,同时也加快了系统的响应过程,增加了系统的稳定性,使系统逐渐趋于稳定,达到了预期控制的目的。
{
Smith预估补偿器的算法研究与实现

目录1.引言 (3)1.1 概述 (3)1.2 毕业设计(论文)的主要内容 (3)2.Smith预估器的理论知识 (4)2.1 Smith预估器的模拟补偿控制原理 (4)2.2 数字Smith预估系统 (5)3.数字PID控制器 (7)3.1 序言 (7)3.2 模拟PID控制器 (7)3.3 数字PID控制器 (7)3.4 PID控制参数的整定 (10)3.4.1 绪论 (10)3.4.2 采样周期T的选取。
(10)3.4.3 PID控制参数的整定方法 (10)4.数字Smith 预估器 (12)4.1 介绍数字PID控制算法的几种发展 (12)4.1.1 积分分离的PID算式 (12)4.1.2带有死区的PID控制算式 (12)4.1.3微分先行的PID控制算式 (13)4.1.4 时间最优PID控制 (13)4.2 数字Smith预估器的计算机实现 (14)4.3 数字Smith预估控制算式的推导 (15)5.软、硬件设计及调试.................................................................................. 错误!未定义书签。
5.1 硬件设计部分.................................................................................. 错误!未定义书签。
5.1.1设计接线图.........................................................................错误!未定义书签。
5.1.2 控制参数的计算....................................................................错误!未定义书签。
5.2 软件设计部分..................................................................................错误!未定义书签。
软件设计-Smith纯滞后补偿PID控制算法

一、题目题目5:以中等纯度的精馏塔为研究对象,考虑到不等分子溢流的影响和非理想的汽液平衡,可以得到塔顶产品轻组分含量Y 与回流量L 之间的传递函数为:s e s s s s L s Y 12)15.17)(13.28()19.0(4.3)()(-⋅+++= 控制要求:1、采用Smith 纯滞后补偿PID 控制算法将塔顶轻组分含量控制在0.99。
2、采用继电法整定PID 参数。
3、整定效果验证:当被控过程参数时变时,如滞后时间由12→24,开环增益由3.4→6时,讨论PID 控制的响应速度及鲁棒性问题,考察当系统参数发生改变时,上述PID 参数是否选取合适。
二、Smith 纯滞后补偿控制原理针对纯滞后系统闭环特征方程含的影响系统控制品质的纯滞后问题,1957年Smith 提出了一种预估补偿控制方案,即在PID 反馈控制基础上,引入一个预估补偿环节,使闭环特征方程不含有纯滞后项,以提高控制质量。
如果能把图2-1中假想的变量B 测量出来,那么就可以按照图2-1所示的那样,把B 点信号反馈到控制器,这样就把纯滞后环节移到控制回路外边。
图2-1 反馈回路的理想结构示意图由图2-1可以得出闭环传递函数为G (s )=D (s )G P (s)e −τs1+D(s)G P (s)由上式可见,由于反馈信号B 没有延迟,闭环特征方程中不含有纯滞后项,所以系统的响应将会大大地改善。
但是由于B 点信号是一个不可测(假想)的信号,所以这种方案是无法实现的。
为了实现上面的方案,假设构造了一个过程的模型,并按图2-2所示那样把控制量U(S)加到该模型上去。
在图 2-2中,如果模型是精确的,那么虽然假想的过程变量B 是得不到的,但能够得到模型中的B m 。
如果不存在建模误差和负荷扰动,那么B m 就会等于B , E m (s )= Y (s )−Y m (s )=0 ,可将B m 点信号作为反馈信号。
但当有建模误差和负荷扰动时,则E m (s )= Y (s )−Y m (s )≠0 ,会降低过程的控制品质。
一类时滞系统的fuzzy-pi-smith控制方法
一类时滞系统的fuzzy-pi-smith控制方法
Fuzzy-PI-Smith控制方法是一种应用于时滞系统的控制器设计方法。
它通过基于聚类原理的模糊控制理论,将模糊系统控制与PID传
统控制进行整合。
它由三个部分组成:fuzzy模块、PI模块和变频器
模块。
fuzzy模块使用聚类函数法,将模糊规则转换为当前数学模型;
PI模块能够控制系统的输入和输出;变频器模块可以改变控制器的参数。
Fuzzy-PI-Smith控制方法的优点在于它的模糊系统有效地处理了
时滞系统中的非线性,减少了控制器的调节精度,提高了系统的可靠
性和稳定性;PI模块能够控制系统的输入和输出,调节系统的输入量
以实现动态精度;变频器模块可以改变控制器参数来控制系统收敛性、稳定性和鲁棒性。
Fuzzy-PI-Smith控制方法也有一些缺点,尤其是其调参复杂性问题。
此外,fuzzy模块也有许多参数,这些参数是需要经过大量试验才
能获得的,而且很难获取合理的参数。
因此,一旦变量参数发生变化,fuzzy-pi-smith控制器的性能也会受到影响。
总而言之,Fuzzy-PI-Smith控制算法在控制时滞系统的方面具有
优秀的表现,但是在某些情况下它也有一些缺点。
分数阶时滞系统的Smith预估分数阶PI控制

第38卷第5期 2020年9月吉林大学学报(信息科学版)Journal of Jilin University (Information Science Edition)Vol. 38 No. 5Sept. 2020文章编号:1671 -5896 (2020) 05 "0542^06分数阶时滞系统的Smith预估分数阶P I控制韩巍,高丙坤,郭浩轩(东北石油大学电气信息工程学院,黑龙江大庆163318)摘要:为解决一类含有时滞的分数阶系统控制问题,提出了一种S m i t h预估分数阶PI(Proportion Integral)控制策略,在不消除分数阶系统中的时滞项的情况下,实现了时滞系统的稳定控制。
通过对分数阶时滞系统进行特性分析,S m i t h预估控制能有效克服时滞对分数阶控制系统的不利影响,并给出了分数阶P I控制器参数整定的简单规则,具有一定的实际应用价值。
同时分析了该分数阶系统的阶次对系统收敛时间的影响,最后仿真验证了结论的正确性。
关键词:分数阶系统;时滞系统;S m i t h预估控制;分数阶P I控制;参数整定中图分类号:T P13文献标识码:ASmith Predictor Fractional Order PI Control for Fractional Order with Time DelayHAN Wei, GAO Bingkun, GUO Haoxuan(School of Electrical Engineering and Information, Northeastern Petroleum University, Daqing 163318, China)Abstract:Aiming at the control problem of time-delay in fractional order systems, the Smith predictor fractional order PI( Proportion Integral) control scheme is introduced for a time-delayed systems in case of no eliminating the time-delayed part. Taking into account the stability of the fractional order systems with time-delayed, the Smith predictor control can effective overcome the time delay for fractional order systems. The simple rules of parameter tuning of fractional order PI controller are given, which have certain practical application value. The influence of the order for fractional order system on the system convergence time is analyzed. The numerical simulation results has verified the effectiveness and feasibility of the conclusion.Key words:fractional order system;time-delayed system;Smith predictor control ;fractional order proportion integral (PI) control; parameter tuning0引言分数阶微积分完善了以往整数阶积分与微分,提供了一种更精确的建模方式,用以描述现实控制 系统,因此近年来分数阶系统的研究越来越受到关注。
时滞系统非线性PID控制器设计与仿真5-17
时滞系统非线性PID控制器设计与仿真摘要时滞系统作为复杂控制系统中的一个重要部分广泛存在于现代的工业过程中。
同时,它也是控制理论应用的一个重要领域,因此对于时滞系统的研究有其很重要的意义。
由于时滞环节所固有的特性决定了其控制的复杂性,因此本文提出了时滞系统的控制方法研究及其控制器设计。
首先,文章分析了滞后环节对系统性能的影响,探讨了几种基于数学模型的常规控制方法:微分先行、自整定PID控制,Smith预估控制,大林算法以及智能控制等。
虽然这些算法比较成熟,但仍然存在着对系统模型变化比较敏感的缺点,所以文章对这些常规的控制方法进行了理论上的阐述并对其进行了性能上的分析比较,从而降低了由于模型变化给系统带来的不利影响,提高了系统的鲁棒性[4]。
然后,总结了基于数学模型的常规控制方法所固有的缺陷:控制系统对模型变化比较敏感,提出了非线性PID控制方法。
由于非线性PID控制在解决模型变化对系统带来不利影响方面有其独特的优越性;而PID算法有其固有的优点并广泛应用于目前的工业过程中; 非线性PID正是结合了两者各自的优点,然后就可以根据系统模型参数的变化智能性地调节PID参数,使系统的控制性能得到了提高,Matlab仿真研究也表明此种方法的可行性。
关键词:时滞系统,非线性PID,Matlab仿真Design and Simulation of Nonlinear PID Controller forTime-delay SystemABSTRACTTime-delay system,as an important part of complex control system,widely exists in modern industrial process.At the same time,time-delay system is also an important field for the application of the control theory.So the research to time-delay system is also an important field for the application of the control theory.So the research to time-delay system has a very important meaning.However,due to the inherent characteristic of time-delay tache,which decides a complex control method in it.So the article brings forward the control method research and model design to time-delay system.Firstly, the paper analyzes the influence which time-delay tache brings to performance and discusses several kinds of control methods based on mathematic model,such an differential antechdence, Smith predictor, internal model control and so on. These methods are comparatively sensitive to the change of system model. So the paper carried out a further analysis to these common control methods on theory and performances are also improved, so as to reduce side effects caused by system model variation, enhancing the robustness of control system.Secondly, the paper summarized the inherent shortcoming of common methods which are based on mathematics model, the shortcoming is that the control system is sensitive to model changing. So the paper brings nonlinear PID control system. Because nonlinear PID control has its particular advantages in settling bad influences which model changing brings to control system, and that, PID method has its own advantages and is widely used in actual industrial process. Nonlinear PID control just combines respective advantages. .Afterward, it is able to adjust the PID parameters intelligentizedly based on model changing, accordingly enhancing system performances.Keywords:Time-delay system,Nonlinear-PID,MATLAB1时滞系统控制发展历程综述1.1时滞系统概述:时滞系统是指作用于系统上的输入信号或控制信号与在其作用下系统所产生的输出信号之间存在着时间延迟的一类控制系统[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文章编号:1009-2269(2001)01-0025-03
采用Smith 预估补偿的时滞系统
PI 控制器的设计
董红生1,周耿烈2
(1.兰州工业高等专科学校电气工程系;2.兰州工业高等专科学校计算机工程系,甘肃兰州 730050)
摘要:针对纯滞后的控制对象特性,提出了基于Smith 预估补偿的PI 控制器的
设计方法。
仿真实验表明,此方法整定的PI 控制器能有效克服较大纯滞后的影
响,性能优于传统的Z N 法和SPAM 法。
关键词:纯滞后对象;Smith 预估补偿;PI 控制器整定
中图分类号:TM571.6 文献标识码:
A
1 引言
在工业过程控制中,许多被控对象具有纯滞后性质,会导致控制作用不及时,引起系统产生超调或不稳定[1],采用Smith 预估补偿的PI 控制器的参数整定方法,通过仿真验证能有效抑制大纯滞后的影响,控制效果优于传统Zieg ler Nichols 法和SPAM 法[2]。
2 Smith 预估补偿的原理
Smith 预估补偿方案如图1所示。
G p (s)=G (s )e - s 控制通道的滞后环节。
G m (s) 补偿环节的传递函数。
由图1可知:Y (s)=(G p (s )+G m (s)) R (s )
将G p (s)代入则有:Y(s )=(G p (s)e - s +G m (s )) R (s) 为了克服时滞,补偿环节G m (s )应为:G m (s )=G (s)(1-e
- s )
由此可得出带有Smith 预估器补偿的控制系
统的结构如图2所示。
其系统闭环传递函数为:
G (s )=G c (s)G p (s)e - s
1+G c (s )G p
(s ) 从上式看出:e - s 已不含在系统的特征方程
里,系统性能完全不受纯滞后的影响,因此,控制
器G C (s)的设计不必考虑纯滞后环节的影响。
图1 S mith 预估补偿方案第8卷 第1期 兰州工业高等专科学校学报 Vol.8,No.12001年3月 Journal o f L anzhou Hig her Po lytechnical College M ar.,2001 收稿日期:2000-10-18 作者简介:董红生(1968-),男,吉林东丰人,兰州工业高等专科学校工程师.
图2 Smith 预估补偿的控制系统
3 PI 控制器的设计
大多数工业控制对象可用一阶或二阶系统加纯滞后来近似描述,
即: G p (s)=K (T s +1)n e - s n =1,2 设PI 控制器的形式为:G c (s )=K p 1+1T i s
由Smith 预估补偿的原理可知,对于PI 控制器的设计只考虑无时滞部分,对象无时滞
部分为: G p (s)=K (Ts +1)
n n =1,2 当n =1时,设计目标为:G c (s )G p (s )1+G c (s )G p (s )=11+T d s
其中:T d = T , 取值范围0.2~1
求得PI 控制器的参数为:T i =T ,K p =T K T d
当n =2时,设计目标为:G c (s )G p (s )1+G c (s )G p (s )= 2n s 2+2 n s + 2n
求得PI 控制器的参数为:T i =T ,K p =14 2K
其中: 取值范围0.5~1
4 仿真实验
例1.考虑大时滞一阶对象模型:G p (s)=1.4e -14s 16s +1
按上述方法给出PI 控制器的参数为:K p =2.5,T i =16
无Sm ith 预估补偿由Z -N 法整定的PI 控制器的参数为: K p =0.63,T i =35.27
无Sm ith 预估补偿由SPAM 法整定的PI 控制器的参数为: K p =0.43,T i =15.9
例2.考虑大时滞二阶对象模型:G p (s)=0.57e -18.7s (8.6s +1)2
按上述方法给出PI 控制器的参数为:K p =1.75,T i =8.6
无Sm ith 预估补偿由SPAM 法整定的PI 控制器的参数为: K p =0.50,T i =13.86 利用MATLAB 软件仿真[3],其阶跃响应如图3:一阶对象;图4:二阶对象 26 兰州工业高等专科学校学报 第8卷
图3 一阶对象阶跃响应曲线 图4 二阶对象阶跃响应曲线
仿真结果显示:采用Smith 预估补偿后,系统的控制性能获得了较大改善,尤其响应速度明显提高,抑制干扰能力明显增强。
5 结论
采用Smith 预估补偿后,消除了闭环系统中的较大纯滞后的影响,使系统控制性能获得了较大改善。
给出PI 控制器的参数能满足较高动态性能要求,并且适用于高阶和非最小相位系统。
参考文献:
[1] 陶永华,等.新型PI D 控制及其应用[M ].北京:机械工业出版社,1998.25-50.
[2] 王亚刚,邵惠鹤.自整定PI D 控制器的研究综述[J ].电气自动化,2000,(1):7-9.
[3] 薛定宇.控制系统计算机辅助设计 M A T L A B 语言及应用[M ].北京:清华大学出版社,1996.181-
204.
Design of PI Controller of Time -lag System Based on Smith
Predictable Compensation
DONG H ong sheng 1,ZHO U Geng lie
2(1.T he Electr ical Department o f L anzhou Hig her Polytechnical College,
2.T he Computer Engineer ing Depar tment of Lanzhou Higher Polytechnical Colleg e ,Lanzhou,730050,Gansu,China)Abstract:Aiming at the great pure delay characteristics of control process ,this paper,based on Smith predictor,presents a design method of PI controller.Simulation shows that the tuning rules overcome efficiently the influence of the g reat pure delay on the system performance and produces a much better system performance than the traditional Z-N and SPAM tuning rules.Key words:the g reat pure delay process;Smith predictable compensation;the tuning of PI controller (责任编辑:吴春生) 27 第1期 董红生,等:采用Smith 预估补偿的时滞系统PI 控制器的设计。