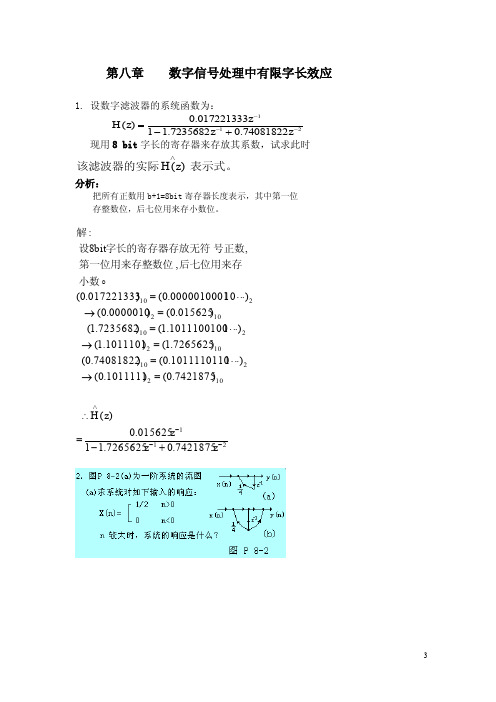
数字信号处理第八章2006-1
数字信号处理教程课后习题及答案

分析:已知边界条件,如果没有限定序列类型(例如因果序列、反因果序列等), 则递推求解必须向两个方向进行(n ≥ 0 及 n < 0)。
解 : (1) y1 (0) = 0 时, (a) 设 x1 (n) = δ (n) ,
按 y1 (n) = ay1 (n − 1) + x1 (n) i) 向 n > 0 处递推,
10
T [ax1(n)+ bx2 (n)] =
n
∑
[ax1
(n
)
+
bx2
(n
)]
m = −∞
T[ax1(n) + bx2(n)] = ay1(n) + by2(n)
∴ 系统是线性系统
解:(2) y(n) =
[x(n )] 2
y1(n)
= T [x1(n)] = [x1(n)] 2
y2 (n) = T [x2 (n)] = [x2 (n)] 2
β α
n +1
β α β =
n +1− N −n0
N−
N
α −β
y(n) = Nα n−n0 ,
(α = β )
, (α ≠ β )
如此题所示,因而要分段求解。
2 .已知线性移不变系统的输入为 x( n ) ,系统的单位抽样响应
为 h( n ) ,试求系统的输出 y( n ) ,并画图。
(1)x(n) = δ (n)
当n ≤ −1时 当n > −1时
∑ y(n) = n a −m = a −n
m=−∞
1− a
∑ y(n) =
−1
a−m =
数字信号处理第8章

方框图和流程图表示如图所示。
x(n) z-1 ③ z-1 -0.1 ⑤ (a) -0.1 (b) 0.7 y(n) x(n) ① ⑦ ② y(n) z
-1
⑧
0.7
④ z-1 ⑥
关于流图表示法的定义
(1) 输入节点或源节点,如x(n)所处的节点⑦。 (2) 输出节点或阱节点,y(n)所处的节点⑧。
统结构简化。
4. 频率采样型:是一种基于频率响应H(ejω)采 样的设计方法。
说明
系统函数|H(z)|在|z|>0处收敛,极点全部在z=0 处(即FIR一定为稳定系统),结构上主要是非 递归结构,没有输出到输入反馈,但频率采 样结构也包含有反馈的递归部分。 系统函数: H ( z )
8
N 1 i0
(1) N为偶数时,h(n)=-h(N-1-n),系统函数进一 N 1 步表示为 2
H ( z)
8
h(n)[ z
n 0
N 1 2
n
z
N 1 n ) (
]
(2) N为奇数时,系统函数为
N 3
H ( z ) h(
N 1 2
(
)
)z
h(n)[ z
n 0
2
n
z
N 1 n ) (
]
h(n)奇对称时的线性相位型结构分析方法与 h(n)偶对称时类似,这里不再赘述。
例8.4
FIR滤波器 H ( z ) 4 6 z 1 5 z 2 6 z 3 4 z 4
8
利用线性相位型结构实现,画出结构图。
解: 由系统函数可知,
8数字信号处理课件

ET =Q[x] x i 2i i b 1
b1
ET =Q[x] x i 2i
i b 1
当上式中所有i =0(b+1 < i < b1),没有误差;
而当所有i =1 (b+1 < i < b1),误差(绝对值)最大
ETm 2b 2b1 2b
误差范围
2b 2b1 ET 0
21002 [△110101]2=240.828125=13.35
21002 [△110101]2=240.828125=13.35 尾数保持四位,则
xˆ3 2C1 [△1101]2=240.8125=13 xˆ3 与x3不同之处即为运算误差。 浮点运算的优点是动态范围大,但是不论加、乘法均 有误差。
x1= 2C1 M1 2C1 M 1
式中 C1= [011]2 ; M1 =[△110]2
相乘后因字长增加一倍,当尾数字长保持不变时,误 差是显然的,下面仅对加法产生误差说明。 浮点加法运算一般有三个步骤:
1)对位,使两个数的阶码相同; 2)相加; 3)使结果规格化(归一化),并作尾数处理。 正是在第三步作尾数处理时产生误差。
(1)x > 0 ,不论原、补、反码表示相同。
若实际数据
x=[12…b1]
b1
2
i 1
i 2i ,共有b1位,
系统有效字长为b位(b< b1)位,截尾后
b
Q[x]=[012…b] 2 i 2i i 1
b1
截尾误差 ET =Q[x] x i 2i
i b 1
当上式中所有i =0 (b+1 < i < b1),没有误差;
由尾数处理所产生的误差积累起来会使运算精度下降, 在有反馈环节(如IIR系统)情况下,误差的循环影响还 可能引起振荡。 上述三种因素造成的影响很复杂,它既与运算方式、 字长有关,又与系统结构密切相关。要同时将这些 因素放在一起分析是很困难的,只能将三种效应分别、 单独的加以分析,计算它们的影响。在分析之前先了 解二进制的表数方法。
胡广书_数字信号处理题解及电子课件_第8章

按 K—L 变换的思路,现需要求 Rx 的特征 值及特征向量,以形成变换的正交矩阵 A 。 但对Markov-1 过程,协方差阵 Rx 的特征向量 可以解析的给出,因此正交变换的矩阵也可解 析的得到:
j , j
是 Rx 的特征值
j 是方程
的根
1 1
有: 由:
tan( N ) 0
ˆ ˆ j x(t ), j (t ) x(t ) (t )dt
* j
ˆ ˆ j x(n), j (n) x(n) (n)
* j n
对
1 , 2 ,, N
ˆ ˆ ˆ 1 , 2 ,, N
则称
如果:
ˆ i i i 1,2, , N
0 ACA1 ACAT N 1
1
数据压缩的理论基础。后面即将讨论。
正交变换的实例: FS,FT, DTFT, DFS, DFT DCT,DST, DHT Walsh-Hadamard, Haar 变换, SLT(斜变换)
8.1 正交变换
一、信号的分解
概念:Βιβλιοθήκη 设空间 X 是由 N 维空间一组向量 1 , 2 ,, N 所张成,即
X span{1 , 2 ,, N }
对任一
x X,都可作如下分解:
x n n
n 1 N
x n n
n 1
N
信号的离散表示,或 信号的分解 是分解系数 或信号的变换
若:
T
AN N
y Ax
矩阵 A 的 行(列)向 量即是前面 的向量 i
Ax, Ax x, x y, y
数字信号处理答案

第二章 离散时间信号与系统1. 为什么数字角频率为π时表示正弦信号变化最快?2. 确定下列序列的周期18[]3[]cos 78j n x n e x n n πππ⎛⎫- ⎪⎝⎭=⎛⎫=- ⎪⎝⎭ 3. 证明 [][]xy yx r n r n =-4. 判断系统的线性、时不变性、因果性和稳定性{}21[]sin []2n T x n n x n +⎛⎫= ⎪⎝⎭5. 证明LTI 系统满足[][][]y n x n h n =*6. LTI 系统的线性常系数差分方程和卷积表示间的关系是什么?7. 比较FIR 和IIR 在以下几方面的异同:单位取样响应的长度、卷积表示是否是有限项求和、差分方程是否与卷积一致、直接实现是否有反馈。
8. 为什么傅立叶变换会得到负频率?9. 傅立叶变换以2π为周期与π为正弦序列的最高频率间的关系。
10. 什么是稳态响应?FIR 和IIR 系统达到稳态响应的时间长短有何区别?为什么?11.用特征函数法、时域或频域卷积法求LTI系统的输出。
其中系统的频响和输入序列分别为:()24112[]sin4jjjeH eenx nωωωπ---=+⎛⎫= ⎪⎝⎭第二章答案1.因为数字信号两个点间采样间隔不为0,如果两点间变换频率高于π看起来就和变化频率低于π是一样的效果。
2.1(1) 2/2/()16,8314(2) 2/2/(),1473NNπωπππωππ===∞===3.][]'[]'[][][][nrnkxkynkykxnryx kkxy-=-=+=∑∑∞-∞=∞-∞=4.线性,时变,因果,稳定。
5.][*][][][]}[{][][][][nhnxknhkxknTkxknkxTnykkk=-=-=⎥⎦⎤⎢⎣⎡-=∑∑∑∞-∞=∞-∞=∞-∞=δδ6.差分方程求和项数有限,可以有输出的递归存在;卷积表示求和项数可能无限,没有输出的递归;对于FIR,两者可以是一致的。
程佩青《数字信号处理教程(第三版)》课后习题答案精编版

第一章 离散时间信号与系统
1 .直接计算下面两个序列的卷积和 y( n ) = x( n )* h( n )
h (n )
=
⎧an ⎨
⎩0
, 0 ≤ n ≤ N −1 , 其他n
x (n )
=
⎧⎪ β ⎨
n−n 0
⎪⎩ 0
,n0 ≤ n , n < n0
请用公式表示。
分析:
①注意卷积和公式中求和式中是哑变量 m ( n 看作参量),
y (n ) ={1,2,3,3,2,1} ;
②δ (n)* x(n) = x(n) , δ (n − m)* x(n) = x(n − m) ;
③卷积和求解时, n 的分段处理。
6
解:(1) y(n) = x(n) * h(n) = R5(n) (2) y(n) = x(n) * h(n) = {1,2,3,3,2,1}
β α
n +1
β α β =
n +1− N −n0
N−
N
α −β
y(n) = Nα n−n0 ,
(α = β )
, (α ≠ β )
如此题所示,因而要分段求解。
2 .已知线性移不变系统的输入为 x( n ) ,系统的单位抽样响应
为 h( n ) ,试求系统的输出 y( n ) ,并画图。
(1)x(n) = δ (n)
∑ ∑( ) n α m−n0 n−m = β α = β m=n0
nn β
n0
α
n β −n0
− β n0
α
β n +1 α
1
−
β α
α β =
− n +1− n0
数字信号处理-答案第八章
y (1) y (0) QR [0.75 y ( 1)] 0.5 QR [0.75 0.5] 0.125 y ( 2) y (1) QR [0.75 y (0)] 0.125 QR [0.75 0.5] 0.25
y (3) y ( 2) QR [0.75 y (1)] 0.25 QR [0.75 0.125] 0.375
y (1) 0.5 . 求 0 n 10 的 11 点输出 y (n) 值.
(b) 证明当 QR [a y (n 2)] y (n 2) 时发生零输入极限环振荡, 并用等效极点迁移来解 释这个现象。
分析:
b=3 表示小数是 3 位,加整数位后为 b+1 位定点算法只有相乘才有 舍入量化误差。一阶系统零输入极限环振荡发生在
y (8) y (7) QR [0.75 y (6)] 0.125 QR [0.75 0.25] 0.125 y (9) y (8) QR [0.75 y (7)] 0.125 QR [0.75 0.125] 0.25 y (10) y (9) QR [0.75 y (8)] 0.25 QR [0.75 ( 0.125)] 0.125
^ ^ y ( n 1) y (6) 0.25 ^ ^ y ( n 2) y (3) 0.375
^ ^ ^ ^
即并不满足 ( 2)式。因而 n 3 时,并 未进入极限环振荡。
9
解 : (b) 对原二阶系统 ,当 a 0.25时, 有共轭极点
数字信号处理第8章答案详解
∑∫
∞
−∞
xa (t )δ(t − nT )e − jΩ t dt
在上式的积分号内只有当t=nT时, 才有非零值, 因此
ˆ X a ( jΩ ) =
n = −∞
∑
∞
第 8 章
上 机 实 验
① 分别求出x1(n)=R8(n)和x2(n)=u(n)的系统响应y1(n)和 y2(n), 并画出其波形。 ② 求出系统的单位脉冲响应, 画出其波形。 (3) 给定系统的单位脉冲响应为 h1(n)=R10(n) h2(n)=δ(n)+2.5δ(n-1)+2.5δ(n-2)+δ(n-3) 用线性卷积法求x1(n)=R8(n)分别对系统h1(n)和h2(n)的输 出响应y21(n)和y22(n), 并画出波形。
第 8 章
上 机 实 验
8.1.3 实验结果与波形 实验结果与波形
实验结果与波形如图8.1.1所示。
第 8 章
上 机 实 验
第 8 章
上 机 实 验
第 8 章
上 机 实 验
第 8 章
上 机 实 验
图8.1.1
第 8 章
上 机 实 验
8.1.4 分析与讨论
(1) 综合起来, 在时域求系统响应的方法有两种, 第一种是通过解差分方程求得系统输出, 注意要合理地选 择初始条件; 第二种是已知系统的单位脉冲响应, 通过求 输入信号和系统单位脉冲响应的线性卷积求得系统输出。 用计算机求解时最好使用MATLAB语言进行。 (2) 实际中要检验系统的稳定性, 其方法是在输入 端加入单位阶跃序列, 观察输出波形, 如果波形稳定在一 个常数值上, 系统稳定, 否则不稳定。 上面第三个实验 是稳定的。 (3) 谐振器具有对某个频率进行谐振的性质, 本实 验中的谐振器的谐振频率是0.4 rad,因此稳定波形为sin(0.4n)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
(3) 零极点分布
Im(z) pk*
pk
H (z) zN D(z1) D(z)
若zk是零点,则z-k1 pk为极点
zk
H(z)的系数是实数,
所以其零点应该是共轭的
其极点应该是共轭的
Re(z) 即 零点 z zk
极点 z pk zk1
z zk* z pk* (zk1)*
zk* 所以复数零极点是四个一组
若全通系统的相位函数是非正的,则可得到本性质。
高阶全通系统可以由一阶和二阶全通系统函数 相乘来表示。 一阶和二阶全通系统的系统函数如下:
H
ap
(z)
z1 a 1 az1
Hap(z)
z1 a 1 az1
•
z1 a 1 az1
若一阶和二阶全通系统的相位是非正的,则高阶
全通系统的相位必然也是非正的。
(2) 全通滤波器的系统函数
N
H (z)
k 0 N
ak z N k ak zk
zN a1zN 1 a2 zN 2 aN 1 a1z1 a2 z2 aN zN
,
k 0
a0 1
或者写成二阶滤波器级联形式:
L
H(z)
i1
z2 a1i z1 a2i a2i z2 a1i z1 1
=2[ (1 2 )]
二阶全通系 统具有非正
zaz 1 2 zz0 z
1 2
相位的几何
arg[
H ap
(e
j
)]0
(c) 最小相位系统保证其逆系统存在。
给定一个因果稳定系统H(z)=B(z)/A(z),
定义其逆系统为:
H INV
(z)
1 H (z)
A( z ) B(z)
一个因果稳定系统的所有零点都在单位圆外, 则该系统称为最大相位系统。记为Hmax(z)
一个因果稳定系统的零点在单位圆内外都有, 则该系统称为混合相位系统。
(2) 特点
(a) 任何一个非最小相位系统的系统函数H(z)均
可 由 一 个 最 小 相 位 系 统 Hmin(z) 和 一 个 全 通 系 统 Hap(z)级联而成, 即: H(z)=Hmin(z)·Hap(z)
(b) 在幅频响应特性相同的所有因果稳定系统集 中, 最小相位系统的相位延迟(负的相位值)最小。
任何一个非最小相位系统H(z)的相位函数,是一个 最小相位系统Hmin(z)的相位函数和全通系统Hap(z)的 相位函数之和。即
arg[H (e j )] arg[Hmin (e j )] arg[Hap (e j )]
当且仅当H(z)为最小相位系统时, 其逆系统才是因果稳定的。
的极点。全通滤波器系统函
数可以写为:
H(z)
N k 1
z1 zk 1 zkz1
还可以用下面的 形式表示
设 (zk-1)* 为 全 通 滤 波 器 的零点,则zk是全通滤波器 的极点。 全通滤波器系统
函数可以写为:
H(z)
N z1 zk* k1 1 zk z1
(4)作用
全通滤波器是一种纯相位滤波器,用于相位均衡(相 位校正)。
N
N
ak zN k
H (z)
k 0 N
ak zk
zN
k 0 N
ak zk ak zk
zN
D( z 1 ) D(z)
k 0
k 0
式中
N
D(z) ak zk
k 0
由于系数ak是实数, 所以有 D(e j ) D (e j )
H (e j )
| e j |
D(e j ) D(e j )
D (e j ) D(e j )
第8章 其它类型的数字滤波器
8.1 几种特殊的滤波器 8.2 格型滤波器
8.1 几种特殊的滤波器
1 全通滤波器
(1)定义 若滤波器的幅频特性对所有频率均等于常数或1,
即 |H(e jω)|=1, 0≤ω≤2π
则该滤波器称为全通滤波器。
全通滤波器的频率响应函数可表示成 H(e jω)=e jφ(ω)
2 梳状滤波器
H
(
z
N
)
1 zN 1 azN
0<a<1
极点
pk
N
a
j 2
eN
作用: 消除电网谐波干扰。
零点
zk
j 2
e N
在彩电中用于亮色分离和色分离等。
Im(z)
Hk(e j¦Ø)
1
Re(z)
…
零零 极点 点极点在 在点在单 半在单位 径半圆 为位上¦径圆Á N1为的上圆,上
11
¦
¦AÁ NN
图 8.1.1 全通滤波器一组零极点示意图
实数零极点是两个一组 .
Im(z) pk*
将零点zk和极点pk*=(zk-1)*组成一对,
zk
将零点zk*与极点pk=zk-1组成一对
全通滤波器的极点与零点
Re(z) 呈共轭倒易关系。
pk
zk*
设 zk-1 为 全 通 滤 波 器 的
零 点 , 则 zk* 是 全 通 滤 波 器
0
0
22¦Ð
NN
44¦Ð
NN
66¦Ð
NN
88¦Ð
NN
1100¦Ð
NN
Ø
A
1 N
的圆上
(a)
(b)
图 8.1.2
梳状滤波器
H
(
z
N
)
1 zN 1 azN
的零极点分布和幅频响应特性(N=8)
3 最小相位系统
(1)定义
一个因果稳定系统的所有零点都在单位圆内, 则该系统称为最小相位系统。记为Hmin(z)
1)对一阶全通系统
H ap
(z)
z
z1 a za
Hap (e j ) Hap (z)
ze j
e j
e j a e j a
z=ejω
Hap (e j )
e j
e j a e j a
ω/2
上式中分数部分的分子、 分母
αω
是共轭的, 因此相角相反。
arg[Hap (e j )] 2 arg(e j a)
一阶全通系统具有非正相位 的几何证明图
arg(e j a)
2
arg[Hap (e j )] 0
2)对二阶全通系统
z=ejω
1
Hap(e j )
e
j2
e j e j
a a
•
e j a e j a
a 1
ω
2
ω
ω 1
z*=e-jω
arg[Hap (e j )] 2[ arg(e j a) arg(e j a*)]