第一章直流伺服电机讲解
直流伺服电机专题讲解(最新版)

得
为特性曲线的斜率; 为由负载阻转矩决定的常数。
30
调节特性为一上翘的直线。
Ua0 –始动电压 K1 – 特性斜率
图1-4 直流伺服电动机的调节特性
31
(1) Ua0和k1的物理意义
•
始动电压Ua0: Ua0是电动机处在待动而又未动临界
状态时的控制电压。
由
,当n=0时,便可求得
由于
,即负载转矩越大,始动电压越高。而且控制
复励电动机:励磁线圈与转子电枢的联接有串有并,接在 同一电源上。
If
Ia
If
Uf M U U
MU
MU
M
他励
并励
串励
复励
7
二、 工作原理
电刷
+ U
N I
I
–
S
换向片
直流电源
电刷
换向器
线圈
8
电刷
+ U
F N
I
F I
–
S
换向片
换向器作用: 将外部直流电 转换成内部的 交流电,以保 持转矩方向不 变。
注意:换向片和电源固定联接,线圈无论怎样转 动,总是上半边的电流向里,下半边的电流向外。 电刷压在换向片上。
Te=TL+ T0
23
1.2.2 运行特性
•伺服电动机的运行特性包括机械特性和调节特性。
1. 机械特性
机械特性是指电枢电压等于常数时,转速与电磁
转矩之间的函数关系,即
。
把
代入式
得
,为理想空载转速;
,为直线的斜率。
24
1.2.2 运行特性
机械特性为一直线 n0 -- 理想空载转速 TK-- 堵转转矩 k Δn --直线斜率
伺服电机工作原理
伺服电机工作原理伺服电机是一种能够根据控制信号来精确控制位置、速度和加速度的电机。
它主要由电机本体、编码器、控制器和电源组成。
下面将详细介绍伺服电机的工作原理。
1. 电机本体:伺服电机通常采用直流电机或步进电机。
直流电机由电枢和永磁体组成,通过电枢中的电流和永磁体之间的相互作用产生转矩。
步进电机通过施加脉冲信号来控制转子的位置。
2. 编码器:编码器是伺服电机的反馈装置,用于测量电机的位置和速度。
它通常由光电传感器和编码盘组成。
编码盘上有许多等距离的刻线,当电机旋转时,光电传感器会感应到刻线的变化,并将这些变化转换成电信号。
3. 控制器:伺服电机的控制器是控制电机运动的核心部件。
它接收来自编码器的反馈信号,并根据设定的目标位置或速度,计算出电机应该施加的控制信号。
控制器可以采用PID控制算法或其他高级控制算法来实现精确的位置和速度控制。
4. 电源:伺服电机需要稳定的电源来提供工作所需的电能。
通常使用直流电源,电压大小根据电机的要求而定。
伺服电机的工作原理如下:1. 控制器接收到来自外部的控制信号,例如目标位置或目标速度。
2. 控制器根据当前位置和目标位置之间的差异,计算出电机应该施加的控制信号。
3. 控制器将控制信号发送给电机,电机根据信号的大小和方向来调整电流和转矩。
4. 电机开始运动,并通过编码器不断测量自身的位置和速度。
5. 编码器将测量结果反馈给控制器,控制器根据反馈信号进行修正,使电机逐渐接近目标位置或目标速度。
6. 当电机达到目标位置或目标速度时,控制器停止发送控制信号,电机停止运动。
伺服电机的工作原理可以简单概括为控制器接收控制信号,计算出控制信号,发送给电机,电机运动并通过编码器反馈位置和速度信息,控制器根据反馈信息进行修正,实现精确的位置和速度控制。
伺服电机广泛应用于各种需要精确控制位置和速度的领域,例如工业自动化、机器人、印刷设备、医疗器械等。
它的高精度和可靠性使得伺服电机成为现代自动化系统中不可或缺的一部分。
伺服电机知识汇总(直流-交流伺服电机)

伺服电机知识汇总(直流/交流伺服电机)伺服电机servomotor“伺服”一词源于希腊语“奴隶”的意思。
“伺服电机”可以理解为绝对服从控制信号指挥的电机:在控制信号发出之前,转子静止不动;当控制信号发出时,转子立即转动;当控制信号消失时,转子能即时停转。
伺服电机是自动控制装置中被用作执行元件的微特电机,其功能是将电信号转换成转轴的角位移或角速度。
伺服电机分为交流伺服和直流伺服两大类交流伺服电机的基本构造与交流感应电动机(异步电机)相似。
在定子上有两个相空间位移90°电角度的励磁绕组Wf和控制绕组WcoWf,接恒定交流电压,利用施加到Wc上的交流电压或相位的变化,达到控制电机运行的目的。
交流伺服电机具有运行稳定、可控性好、响应快速、灵敏度高以及机械特性和调节特性的非线性度指标严格(要求分别小于10%~15%和小于15%~25%)等特点。
直流伺服电机基本构造与一般直流电动机相似。
电机转速n=E/K1j=(Ua-IaRa)/K1j,式中E 为电枢反电动势,K为常数,j为每极磁通,Ua、Ia为电枢电压和电枢电流,Ra为电枢电阻,改变Ua或改变φ,均可控制直流伺服电动机的转速,但一般采用控制电枢电压的方法,在永磁式直流伺服电动机中,励磁绕组被永久磁铁所取代,磁通φ恒定。
直流伺服电动机具有良好的线性调节特性及快速的时间响应。
直流伺服电机的优点和缺点优点:速度控制精确,转矩速度特性很硬,控制原理简单,使用方便,价格便宜。
缺点:电刷换向,速度限制,附加阻力,产生磨损微粒(无尘易爆环境不宜)交流伺服电机的优点和缺点优点:速度控制特性良好,在整个速度区内可实现平滑控制,几乎无振荡,90%以上的高效率,发热少,高速控制,高精确度位置控制(取决于编码器精度),额定运行区域内,可。
第一章-直流伺服电机
图1-1 电枢控制原理图
控制方式
2.磁场控制
电枢绕组电压保持不变,变化励磁回路旳电压。若电 动机旳负载转矩不变,当升高励磁电压时,励磁电流 增长,主磁通增长,电机转速就降低;反之,转速升 高。变化励磁电压旳极性,电机转向随之变化。 尽管磁场控制也可到达控制转速大小和旋转方向旳目 旳,但励磁电流和主磁通之间是非线性关系,且伴随 励磁电压旳减小其机械特征变软,调整特征也是非线 性旳,故少用。
1.2.2 运营特征
(2)电枢电压对机械特征旳影响
n0和Tk都与电枢电压成正比,而斜率k则与电枢电压无关。 相应于不同旳电枢电压能够得到一组相互平行旳机械特征曲线。
直流伺服电动机由放大器供电时, 放大器能够等效为一种电动势源 与其内阻串联。内阻使直流伺服 电动机旳机械特征变软。
图 1-3 不同控制电压时旳机械特征
较小、 电枢电阻 Ra 较大、转动惯量 J 较大
时是这种情况。
图1-6 在 4 e m 时, n、ia 旳过渡过程
过渡过程曲线
(2)
当
4 e
m
时,由
p1,.2
1 2 e
1
1 4 e m
, p1 和
p2
两根是共轭复数。
在过渡过程中,转速和电流随时间旳变化是周期性旳。
由e
La Ra
和m
2JRa 60CeCt
2
可知,电枢
电感 La 较大、 电枢电阻 Ra 较小、转动
惯量 J 较小时,就会出现这种振荡现象。
图1-7 在 4 e m 时, n、ia 旳过渡过程
过渡过程曲线
⑶ 当4 e m 时(多数情况满足这一条件), e 很小能够忽视不计。
于是式
m e
直流伺服电机PPT课件
电流反馈
功放
第14页/共47页
G
M
§6.4 直流伺服电机 (五) 直流进给运动的速度控制(2)PWM调速系统
① 主回路:
大功率晶体管开关放大器; ② 控制回路:功率整流器。
速度调节器;
电流调节器;
固定频率振荡器及三角波发生器;
脉宽调制器和基极驱动电路。
区别:
与晶闸管调速系统比较,速度调节器和电流调节
2) 脉宽调制器
同向加法放大器电路图 U S r –速度指令转化过
来的直流电压
U△
R1
U Sr
R1
R2
+ +12V
-
R3
USC
U △- 三角波
USC- 脉宽调制器的输
出( U S r +U △ )
调制波形图
U △+U S r
U△
+U S r
o
o
t
-12V U △+U S r
t
o
-U S r
t
U SC
电机转速与理想空载转速的差
(6.7)
ω(n) △ω
ωO
O
TL TS T
图6.7 直流电机的机械特性
第3页/共47页
§6.4 直流伺服电机 (二)一般直流电机的工作特性
2. 动态特性 直流电机的动态力矩平衡方程式为
TM TL J d
dt
式中
TM ─电机电磁转矩; TL ─ 折算到电机轴上的负载转矩; ω ─ 电机转子角速度; J ─ 电机转子上总转动惯量;
(6.1)
KT —转矩常数; Φ—磁场磁通;Ia —电枢电流;TM —电磁
转矩。电枢回路的电压平衡方程式为:
最全直流电机工作原理与控制电路解析(无刷+有刷+伺服+步进)

最全直流电机工作原理与控制电路解析(无刷+有刷+伺服+步进)直流电动机是连续的执行器,可将电能转换为(机械)能。
直流电动机通过产生连续的角旋转来实现此目的,该角旋转可用于旋转泵,风扇,压缩机,车轮等。
与传统的旋转直流电动机一样,也可以使用线性电动机,它们能够产生连续的衬套运动。
基本上有三种类型的常规电动机可用:AC 型电动机,(DC)型电动机和步进电动机。
典型的小型直流电动机交流电动机通常用于高功率的单相或多相(工业)应用中,需要恒定的旋转扭矩和速度来控制大负载,例如风扇或泵。
在本(教程)中,我们仅介绍简单的轻型直流电动机和步进电动机,这些电动机用于许多不同类型的(电子),位置控制,微处理器,(PI)C和(机器人)类型的电路中。
基本直流电动机该直流电动机或直流电动机,以给它的完整的标题,是用于产生连续运动和旋转,其速度可以容易地控制,从而使它们适合于应用中使用是速度控制,伺服控制类型的最常用的致动器,和/或需要定位。
直流电动机由两部分组成,“定子”是固定部分,而“转子”是旋转部分。
结果是基本上可以使用三种类型的直流电动机。
有刷(电机)–这种类型的电机通过使(电流)流经换向器和碳刷组件而在绕线转子(旋转的零件)中产生磁场,因此称为“有刷”。
定子(静止部分)的磁场是通过使用绕制的定子励磁绕组或永磁体产生的。
通常,有刷直流电动机便宜,体积小且易于控制。
无刷电动机–这种电动机通过使用附着在其上的永磁体在转子中产生磁场,并通过电子方式实现换向。
它们通常比常规的有刷型直流电动机更小,但价格更高,因为它们在定子中使用“霍尔效应”开关来产生所需的定子磁场旋转顺序,但是它们具有更好的转矩/速度特性,效率更高且使用寿命更长比同等拉丝类型。
伺服电动机–这种电动机基本上是一种有刷直流电动机,带有某种形式的位置反馈控制连接到转子轴。
它们连接到PWM型控制器并由其控制,主要用于位置(控制系统)和无线电控制模型。
普通的直流电动机具有几乎线性的特性,其旋转速度取决于所施加的直流电压,输出转矩则取决于流经电动机绕组的电流。
直流(DC)与交流(AC)伺服电机及驱动

目录直流(DC)与交流(AC)伺服电机及驱动 (1)1.直流(DC)伺服电机及其驱动 (1)(1)直流伺服电机的特性及选用 (1)(2)直流伺服电机与驱动 (2)(3)PWM直流调速驱动系统原理 (3)2.交流(AC)伺服电机及其驱动 (4)直流(DC)与交流(AC)伺服电机及驱动1.直流(DC)伺服电机及其驱动(1)直流伺服电机的特性及选用直流伺服电机通过电刷和换向器产生的整流作用,使磁场磁动势和电枢电流磁动势正交,从而产生转矩。
其电枢大多为永久磁铁。
直流伺服电机具有较高的响应速度、精度和频率,优良的控制特性等优点。
但由于使用电刷和换向器,故寿命较低,需要定期维修。
20世纪60年代研制出了小惯量直流伺服电机,其电枢无槽,绕组直接粘接固定在电枢铁心上,因而转动惯量小、反应灵敏、动态特性好,适用于高速且负载惯量较小的场合,否则需根据其具体的惯量比设置精密齿轮副才能与负载惯量匹配,增加了成本。
直流印刷电枢电动机是一种盘形伺服电机,电枢由导电板的切口成形,导体的线圈端部起换向器作用,这种空心式高性能伺服电机大多用于工业机器人、小型NC机床及线切割机床上。
宽调速直流伺服电机的结构特点是励磁便于调整,易于安排补偿绕组和换向极,电动机的换向性能得到改善,成本低,可以在较宽的速度范围内得到恒转速特性。
永久磁铁的宽调速直流伺服电机的结构如下图所示。
有不带制动器a和带制动器b两种结构。
电动机定子(磁钢)1采用矫顽力高、不易去磁的永磁材料(如铁氧体永久磁铁)、转子(电枢)2直径大并且有槽,因而热容量大,结构上又采用了通常凸极式和隐极式永磁电动机磁路的组合,提高了电动机气隙磁通密度。
同时,在电动机尾部装有高精密低纹波的测速发电机,并可加装光电编码器或旋转变压器及制动器,为速度环提供了较高的增量,能获得优良的低速刚度和动态性能。
日本发那科(FANUC)公司生产的用于工业机器人、CNC机床、加工中心(MC)的L系列(低惯量系列)、M系列(中惯量系列)和H系列(大惯量系列直流伺服电机)。
直流伺服电机工作原理PPT课件
9.1 伺服电动机
伺服电动机又称执行电动机。其功能是将输 入的电压控制信号转换为轴上输出的角位移和角 速度,驱动控制对象。
伺服电动机可控性好,反应迅速。是自动控 制系统和计算机外围设备中常用的执行元件。 伺服电动机可分为两类:
交流伺服电动机 直流伺服电动机
第3页/共40页
9.1.1 交流伺服电动机
应用: 交流伺服电机的输出功率一般为0.1-100 W,
电源频率分50Hz、400Hz等多种。它的应用很广
泛,如用在各种自动控制、自动记录等系统中。
第11页/共40页
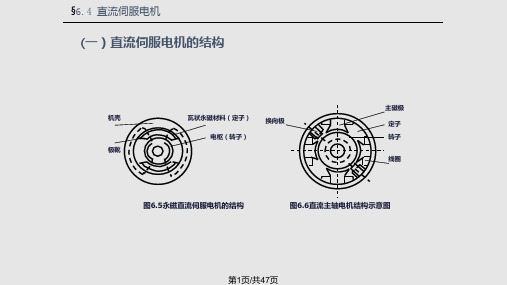
9.1.2 直流伺服电动机
直流伺服电动机的结构与直流电动机基本相
同。只是为减小转动惯量,电机做得细长一些。
直流伺服电动机的工作原理也与直流电动机
第32页/共40页
A
B'
C'
C
B
A'
A
B'
C'
C
B
A'
A
B'
C'
C
BБайду номын сангаас
A'
AB通电
动画
BC通电
CA通电
与单三拍方式相似,双三拍驱动时每个通电循 环周期也分为三拍。每拍转子转过30 (步距角), 一个通电循环周期(3拍)转子转过90(齿距角)。
第33页/共40页
从以上对步进电机三种驱动方式的分析可 得步距角计算公式:
齿和B、B´ 磁极轴线对齐;当C相通电时,转子 再转过30角,1、3齿和C´、C磁极轴线对齐。
第28页/共40页
这种工作方式下,三个绕组依次通电一次为一 个循环周期,一个循环周期包括三个工作脉冲,所 以称为三相单三拍工作方式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
影响不大,但是降低电机的工作效率。
19
第一节 直流伺服电机工作原理
3、直流伺服电动机磁场、电枢反应与换向
20
第一节 直流伺服电机工作原理
3、直流伺服电动机磁场、电枢反应与换向
6
本章教学:
二、教学时间安排:4学时
三、主要内容:
• 第一节 直流伺服电机的结构 • 第二节 直流伺服电机工作原理 • 第三节 直流伺服电机的特性 • 第四节 直流伺服电机控制 • 第五节 无刷直流电动机 本章重点:直流伺服电机工作原理和静态特性; 本章难点:直流伺服电机的动态特性。
四、教学过程:
37
第三节 直流伺服电机的特性
2、直流伺服电机的动态特性
影响 m 的主要因素:
(1)负载转动惯量的影响:
J=Jm+JL′ JL′——负载折算转动惯量
(2)电枢回路电阻的影响:
Ra′=Ra+Ri Ri ——电源(放大器)内阻
(3)机械特性硬度的影响: n/T-机械特性的斜率
38
第四节 直流伺服电机控制 电枢控制,输入量是电枢电压(或电流)。 磁场控制,输入量是磁通,激磁电流或电压
21
第一节 直流伺服电机工作原理
4、直流伺服电动机转矩方向与电流方向的关系 转矩方向与电流方向的关系:为确保直流电动机朝确定 的方向连续旋转,通过线圈直流伺服电机的结构
传统直流伺服电机和直流电机工作原理、结构和基本 特征没有原则区别,但是在结构和性能上做了一些改 进,具有如下特点:
减小和消除换向火花的方法:
1)移动电刷法。将直流电动机的电刷从几何中性面开始, 逆着电枢旋转方向移动电刷,使换向火花最小为止,移动 的角度大于物理中性面的偏移角。 2)附加换向磁极法。在几何中性面处设置附加的换向磁 极,它的激磁绕组与电枢绕组串联,换向极的磁场方向必 须与电枢磁场的方向相反。 3)选用合适电刷法。
定子:磁场—永磁体
转子:电枢绕组
换向:换向器与碳刷
17
第一节 直流伺服电机工作原理
3、直流伺服电动机磁场、电枢反应与换向
直流电动机磁场分析:
18
第一节 直流伺服电机工作原理
3、直流伺服电动机磁场、电枢反应与换向
电枢反应的两个重要影响:
1)气隙磁场发生扭斜,气隙合成磁场的物理中性面将逆 着电动机旋转方向转过一个角度,物理中性面与几何中性 面不再重合。
1、直流伺服电机的静态特性:电枢控制
机械(调节)特性方程式 :
n
1)机械特性:
Ua Ct
T R em
a
2
Ce Ct
Ua一定时,
n=f (Tem )
转速与转矩的关系
30
第三节 直流伺服电机的特性
1、直流伺服电机的静态特性:电枢控制 2.调节特性: Tem一定时,n=f (Ua )
转速与控制量(如电 压)的关系
任课教师:李正强
2013-2014学年第二学期
2
3
4
5
本章教学:
一、教学要求:
掌握直流伺服电机结构、分类和作用等概念; 理解直流伺服电机工作原理; 掌握直流伺服电机的静态特性; 了解直流伺服电机的动态特性(关注机电时间常数
的作用); 理解无刷直流电动机与普通直流伺服电机的区别。
1、采用细长的电枢以便降低转动惯量,其惯量大约是普通直 流电动机的1/3~ 1/2。 2、具有优良的换向性能,在大的峰值电流冲击之下仍能确保 良好的换向条件,因此具有大的瞬时电流和瞬时转矩。 3、机械强度高,能够承受住巨大的加速度造成的冲击力作用。
4、电刷一般都安放在几何中型面上,以确保正反转特性对称。
23
第二节 直流伺服电机的结构
24
第二节 直流伺服电机的结构
25
第二节 直流伺服电机的结构
低惯量直流伺服电机
无槽电枢
盘式电枢
空心杯电枢
26
第二节 直流伺服电机的结构
宽调速直流伺服电机
27
第三节 直流伺服电机的特性
转矩:
T em
Ct
I a
K t
Ia
电势:
E a C e n K e
31
第三节 直流伺服电机的特性
1、直流伺服电机的静态特性:电枢控制
32
第三节 直流伺服电机的特性
2、直流伺服电机的动态特性
Tem(t) CtIa (t)
Ea (t)
60
2
Ce(t)
Tem (t )
J
d(t)
dt
Tc (t)
Ua (t)
La
dIa (t) dt
Ra Ia (t)
13
鼓形绕组
14
15
第一节 直流伺服电机工作原理
2、直流伺服电动机基本原理
16
第一节 直流伺服电机工作原理
2、直流伺服电动机基本原理 加于直流电机的直流电源,借助于换向器和电刷 的作用,使直流电机电枢线圈流过的电流,方向 是交变的,从而使电枢产生的电磁转矩的方向恒 定不变,确保直流电机朝确定的方向连续旋转。
若 m 10 e ,可写成:
(s) 2 (60Ce)
1 Ke
U (s) ( ms 1)( es 1) ( ms 1)( es 1)
当 e很小,1 e 远远超过了控制系统通频带时,直流电动
机的传递函数可以简化为:
(s) 2 (60Ce) 1 Ke U (s) ms 1 ms 1 同理可得: (s) 2 (60Ce) 1 Ke U (s) s( ms 1) s( ms 1)
Ea (t)
33
第三节 直流伺服电机的特性
2、直流伺服电机的动态特性
经拉氏变换整理得:
(s)
1 Js
(Tem ( s)
Tc (s))
Tem(s) CtIa (s)
1 Ia (s) Las Ra (U a (s) Ea (s))
Ea
(s)
60
2
Ce ( s)
34
第三节 直流伺服电机的特性
转矩平衡方程式:
T em
T 0
T L
J
d
dt T 0
T L
G
D2
375
dn dt
28
第三节 直流伺服电机的特性
电势动态平衡方程式:
Ua
La
di a
dt
i a
Ra
E a
电势稳态平衡方程式:
U a I a Ra Ea
转矩稳态平衡方程式:
T em T 0 T L
29
第三节 直流伺服电机的特性
7
第一节 直流伺服电机工作原理
1、直流伺服电动机的结构
8
图形符号
9
第一节 直流伺服电机工作原理
1、直流伺服电动机的结构
定子结构
10
第一节 直流伺服电机工作原理
1、直流伺服电动机的结构
转子结构
11
第一节 直流伺服电机工作原理
1、直流伺服电动机的结构
换向装置
12
第一节 直流伺服电机工作原理
2、直流伺服电动机基本原理
2、直流伺服电机的动态特性
按以上各式可建立动态方框图:
Ua (s)
- Ea (s)
Te (s)
-
1 Ra La s
Ia (s)
Ct Tem(s)
T (s) 1 Js
60Ce 2
(s)
35
第三节 直流伺服电机的特性
2、直流伺服电机的动态特性
当Te=0时,传递函数为:
(s) 2 (60Ce)
39
第四节 直流伺服电机控制
40
第四节 直流伺服电机控制
PWM驱动装置控制原理图
41
第四节 直流伺服电机控制
PWM控制电路功能方框图
42
第四节 直流伺服电机控制
电压 命令
速度调节器
电流调节器
功率放大器
速度反馈
电流反馈
M T
43
1 Ke
U (s) m es2 ms 1 m es2 ms 1
=
式中, m 为电动机机电时间常数
m
2Ra J 60CeCt 2
2
60
Jn0 Ts
2
60
Jtg
e 为电动机电磁时间常数, e La Ra
36
第三节 直流伺服电机的特性
2、直流伺服电机的动态特性