多旋翼无人机的基本飞行动作
无人机技术基础与技能训练课件:无人机飞行训练

5
无人机飞行训练 多旋翼无人机模拟飞行训练
6.不要动遥控器的摇杆,继续点击Skip。 7. 点击完成,如图。这一步完成后,遥控器的校准已经完成。
6
无人机飞行训练 多旋翼无人机模拟飞行训练
多旋翼无人机模拟软件使用 (1)选多旋翼模型 (2)设设置风速风向等值 (3)设置各通道的控制功能 (4)设置好后,开始飞行
固定翼无人机模拟软件使用 (1)选择固定翼模型 (2)设置风速 (3)设置通道 (4)模拟飞行 设置好后,开始飞行。
17
无人机飞行训练
固定翼无人机模拟飞行训练
固定翼无人机模拟飞行基本动作 (1)起飞 要求:选择适当的位置,配合速度使用升降舵沿45度方向向上爬升; 起飞角度不宜过大,也不宜过小。 (2)降落 要求:操控者转动头部来看着飞机从而操控飞机降落;降落滑行的接 触地面应在操控者的前方,再从这一点进入滑行状态; (3)矩形航线 要求:进入矩形航线的第一边直线要与跑道中心线平行;转弯角度为 90度且要平和转弯;矩形航线四边等高,飞行方向不变化。 (4)水平8字 要求:确定8字航线起始航点;从起始航点开始直线飞行至8字航线一 端转弯点开始飞行。
18
无人机飞行训练 固定翼无人机场外飞行训练
起飞/降落 方法:起飞时无人机逆风从起飞线开始柔和地加速直线滑跑,柔和离 地,小角度爬升至一定安全高度后再进行后续的巡航动作飞行。 要求:起飞前一定要确认风向,应正向逆风起飞;降落时也要正向逆 风降落。
19
无人机飞行训练 固定翼无人机场外飞行训练
矩形航线 方法:逆风飞行进入跑道上空,等高矩形航线第一边,然后分别在相 应位置作90度转弯,完成1个封闭的水平矩形航线。 要求:第一边直线要与跑道轴线平行;90度转弯时要保持柔和;矩形 航线4边同等高度,每边飞行要保持直线。
空气动力学与飞行原理 第5章 多旋翼无人机基本飞行原理

壹 多旋翼无人机飞行性能
(四)避障性能
避障性能是指多旋翼无人机发现、识别并躲避障碍物的能力 。它是多旋翼无人机特有的飞行性能之一,也是其安全性能的重 要指标。目前只有部分多旋翼无人机具备该性能(如大疆精灵 4Pro、零度多比等)。该项性能的提出主要源于多旋翼无人机 多数情况飞行高度较低(100m以内),近地飞行时面临的地形 环境复杂,有房屋建筑、树木、室内、行人等。避障性能的主要 衡量指标为障碍物的大小、躲避障碍物的反应时间、反应距离与 躲避维度。
3
壹 多旋翼无人机飞行性能
(一)飞行速度
多旋翼无人机的飞行速度性能与固定翼无人机不同,主要指最大 垂直上升速度、最大垂直下降速度和最大水平飞行速度。飞行速度对 竞速无人机、竞速航拍无人机有明显意义。但在普通消费级无人机中 ,该意义不大。目前最大垂直上升速度和下降速度均在5m/s以内。最 大水平飞行速度在28m/s以内。随着技术水平的提升,这些飞行速度 均会有所提升,同时对飞控系统、动力系统等提出更高要求
7
贰 多旋翼无人机操纵及控制原理 (一)垂直运动 (六)侧向运动
(五)前后运动
(二)俯仰运动 (三)滚转运动
(四)偏航运动
8
贰 多旋翼无人机操纵及控制原理
目前市场上普遍为无变距多旋翼无人机,其飞行原理与固定翼无人机和无人直升机原理不同,主要体 现在两个方面:
(1)通过调节每个旋翼的转速大小,从而调节升力大小,实现升力的大小和方向发生变化。没有自 动倾斜器,不能通过变距控制每片桨叶的攻角达到改变桨盘平面和升力的作用。
四旋翼无人机俯仰运动状态下的飞行原理示意图
5
壹 多旋翼无人机飞行性能
(三)悬停性能与定位性能 多旋翼无人机的悬停性能定义与无人 直升机相同,具体见4.5节。悬停是旋翼无 人机特有的飞行性能之一,它与定位性能 一起作为衡量多旋翼飞行性能的一项指标。 一般现有无人机采用GPS定位技术、超声 波定位技术或基于双目视觉的定位技术。 悬停精度受定位技术发展的限制。抗干扰 性能一方面与定位技术相关,另一方面与 飞控算法也有一定关系。目前较好的消费 级多旋翼无人机水平定位精度为1.5m,垂 直定位精度为0.5m。
小学信息技术六年级下册教案
信息科技教材分析一、指导思想:面向全体学生,体现学生在科学学习中的主体地位,从小学生的年龄特点及现有经验出发,通过以探究空中机器人为核心的科学学习活动,培养学生对科学的好奇心和求知欲。
开放科学课程,进一步改进评价激励机制,帮助学生逐步养成科学的学习习惯、行为习惯和生活习惯,逐步培养和提高学生的科学素养。
二、学生分析:1.整体学习状况:男生对空中机器人的学习兴趣、课堂反应都明显高于、优于女生。
2.已有知识、经验参差不齐,部分学生有丰富的空中机器人知识积累,平时注意对各类事物的观察,表现出对大自然、对科学的浓厚兴趣;部分学生在课堂上表现出对科学的学习兴趣,但课外书阅读贫乏,无法建立起必要的学习联系;部分学生对空中机器人不感兴趣,无法适应。
3.儿童心理分析:大部分学生,表现出对机器人学习强烈的好奇心和求知欲,喜欢亲自动手做模拟飞行,这种对机器人的浓厚兴趣必将成为学生在小学阶段学习强大内驱力和学习动力。
三、教学目标:通过利用文字、图片、视频资料等途径,使学生了解无人机种类、功能、特点,了解无人机大致构造与组成部分。
通过理论教学、模拟飞行、真机飞行等教学手段,使学生初步掌握对四旋翼起飞、降落等简单飞行技术的控制,了解无人机的自由度。
通过对无人机飞行及控制原理初步学习,使学生初步了解无人机通信与导航系统、飞行控制与载荷控制系统、动力系统工作原理。
空中机器人教学以全面提高学生的基本素质为目的,尊重学生的主体性和主动精神,以学生为性格为基础,注重开发学生的智慧潜能,注重形成学生的健全个性为根本特征的教育,把握了广大学生的兴趣爱好、动手动脑能力,理论联系实践、实践创造理论的能力。
四、教学重难点:1、使学生对无人机产生初步概念,引导学生对无人机产生兴趣。
2、通过模拟飞行及真机飞行,培养学生对四旋翼的兴趣,掌握简单飞行技术。
3、了解无人机三大系统基本工作原理。
五、教学措施:1、教学过程中要充分利用直观教具如模型、图表、幻灯及录像和计算机辅助教学软件等。
多旋翼无人机飞行原理操作原理
多旋翼无人机飞行原理操作原理Multi-rotor unmanned aerial vehicles (UAVs), also known as drones, operate on the principle of generating lift through the rotation of multiple rotors. 多旋翼无人机(UAV),也称为无人机,是通过多个旋转轴产生升力的原理来运行的。
The basic operating principle of a multi-rotor UAV involves the rotation of multiple propellers or rotors to generate lift and control the vehicle's movement. 多旋翼无人机的基本操作原理涉及旋转多个螺旋桨或旋转桨来产生升力和控制飞行器的移动。
The rotors are usually arranged in a symmetrical pattern around the central body of the UAV, and each rotor is connected to an independent motor that provides the necessary power for rotation. 旋转翼通常围绕着无人机的中心机身以对称图案排列,每个旋转翼都连接到独立的电机,为旋转提供所需的动力。
By independently varying the speed and direction of rotation of each rotor, the UAV can achieve the desired level of lift, stability, andmaneuverability. 通过独立改变每个旋转翼的旋转速度和方向,无人机可以实现所需的升力、稳定性和机动性。
无人机植保技术2 多旋翼植保无人机工作原理
多旋翼植保无人机工作原理
多旋翼植保无人机是由多组动力系统组成的飞行平台,常见的有四旋翼、八旋翼、十六旋翼等,甚至由更多旋翼组成。
电动多旋翼无人机是由无刷电机驱动螺旋桨组成单组旋翼动力系统,由惯导系统、飞控系统、导航系统、电子调速器组成控制驱动部分。
多旋翼植保无人机飞行中前进、后退、横移、转向、升高、降低主要是依靠调整桨叶的转速实施各种动作,特点是相邻的两个桨叶旋转方向是相反的,所以它们之间的风场是有相互干扰的,也会造成一定的风场紊乱。
多旋翼无人机进阶飞行
多旋翼无人机进阶飞行作者:姜连涛来源:《第二课堂(课外活动版)》2018年第12期介绍完无人机的一些基础知识和基本飞行动作后,我们接着给大家介绍无人机的一些进阶飞行知识。
要想飞好无人机的进阶飞行动作,我们需要掌握好无人机的起飞、降落以及四面悬停。
这些动作大家不但要能在模拟软件上熟练操作,还要能使用四旋翼无人机进行实际飞行,并且熟练掌握。
好了,我们来一起看看多旋翼无人机都有哪些进阶飞行动作吧!一、直线飞行如果说悬停是多旋翼无人机的静态动作,是一切飞行动作的基础,那么直线飞行就是一切动态飞行动作的基础。
直线飞行是无人机飞行中最简单的动作,但也不要小看了这个动作,直线飞行不是只飞出个直线就可以的。
我们要求的直线飞行是匀速、定高的直线飞行,并且可以做到前飞直线、后退直线、左飞直线、右飞直线。
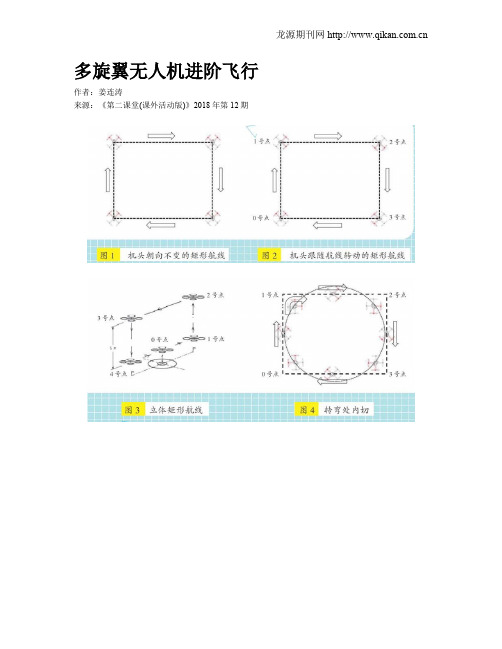
在模拟软件中,我们可以这样来练习直线飞行——飞一个机头朝向不变的矩形航线(如图1)。
在这个过程中,我们需要先推升降舵,让无人机向前飞行,注意保持匀速、定高,在快到达前飞终点时,慢慢减速停下来,然后打右副翼,让无人机向右侧飞行,到达下一个拐点后,拉杆让无人机向后飞行,在最后一个拐点处打左副翼,让无人机向左侧飞行。
飞回来后,我们要看一下终点是不是原来的起点,高度有没有变化。
当我们在外面实际飞行时,无人机会因为风的影响变得容易偏离直线,或者忽高忽低,这就需要我们时刻进行微调。
所以实际飞行会比模拟飞行更难一些,我们需要先在模拟软件上认真地练好这一动作。
二、矩形航线在直线飞行中,我们练习了机头朝向不变的矩形航线,这个矩形航线是为了让我们练习升降舵和副翼操作无人机直线飞行的复合动作。
现在,我们要来练习另一个矩形航线(如图2),这个矩形航线是机头跟随航线转动的矩形。
在这个飞行动作中,我们的要求仍然包括匀速、定高,此外还包括每次转动航向的时候要慢慢地旋转90度,以便让机头对准下一条航线。
在这个矩形航线的飞行中,我们把起点定为0号点,按照飞行顺序,其余依次为1号点、2号点、3号点。
无人机飞行原理—多旋翼无人机飞行原理
方式安排,抵消反转矩。如图所示,电机1和电机3逆时针转动、电动机2和4则顺时针转动,四个电机的反
转矩彼此抵消。
左 + 右 = 右 + 左
四、多旋翼无人机飞行原理
操纵性
1、垂直运动
垂直运动,是指无人机克服自身重力进行上升和下降的运动。是其最基本的功能,X型四旋翼
1 = 2 , 3 = 4
1 + 2 + 3 +4 =
当3 + 4 > 1 +2 时,则无人机在转矩的作用下将绕着纵轴(X轴)产生转动,即右横滚运动;若
3 + 4 < 1 +2 ,则无人在转矩的作用下将绕着纵轴(X轴)产生转动,将实现左横滚运动。
四、多旋翼无人机飞行原理
调节电机转速,来改变总升力 的大小实现。
四、多旋翼无人机飞行原理
操纵性
2、俯仰运动
俯仰运动,是指无人机能绕横轴(Y轴)转动,以无人机机体纵轴(X轴)正方向为无人机前
进方向,X型四旋翼无人机的俯仰运动示意图。
要做俯仰运动,通过改变电动机的转速,使得升力 1 、 2 、 3 、 4 变化,不再保持相等,
相等,并且升力的合力大于重力,但仍然保持对角的反转矩之和相同,即:
1 = 2 , 3 = 4
1 + 2 > 3 +4
1 + 2 + 3 +4 >
1 + 3 = 2 +4
此时,无人机做横滚运动,升力在水平方向的分力,对左右位移进行修正和控制,横滚角为 ,当满足
升力的垂直分力与重力相等时,即 = ,在没有外力干扰的情况下,四旋翼无人机将在水平分力
多旋翼无人机遥控器口诀
多旋翼无人机遥控器口诀摘要:一、引言二、多旋翼无人机遥控器简介三、口诀内容与解析1.起飞准备2.起飞与降落3.姿态调整4.前后左右移动5.旋转与翻滚6.高度控制7.航向锁定8.失控保护四、口诀的实际应用与操作技巧五、总结正文:一、引言多旋翼无人机遥控器口诀是无人机爱好者掌握飞行技巧的关键。
通过熟练掌握口诀,可以轻松操控多旋翼无人机,实现各种飞行动作,提高飞行安全。
本文将详细解析多旋翼无人机遥控器口诀,帮助读者快速掌握飞行技巧。
二、多旋翼无人机遥控器简介多旋翼无人机遥控器,通常采用2.4GHz或5.8GHz无线通信技术,可以实现对无人机的远距离操控。
遥控器上通常设有多个功能按键,如方向舵、油门、升降舵等,通过组合操作,可以实现对无人机姿态、高度、速度等各种参数的调整。
三、口诀内容与解析1.起飞准备确保无人机与遥控器连接正常,遥控器电池充足,无人机电池电量充足。
同时检查周围环境,避免在人群、高楼、电线等危险区域飞行。
2.起飞与降落起飞:缓慢推动油门,直至无人机离地。
降落:减小油门,让无人机缓慢降落。
注意控制高度,避免撞击地面。
3.姿态调整左摇杆上抬:向左倾斜左摇杆下压:向右倾斜右摇杆上抬:向前倾斜右摇杆下压:向后倾斜4.前后左右移动左摇杆向左:向左移动左摇杆向右:向右移动右摇杆向前:向前移动右摇杆向后:向后移动5.旋转与翻滚左摇杆顺时针旋转:顺时针旋转左摇杆逆时针旋转:逆时针旋转右摇杆顺时针旋转:向前翻滚右摇杆逆时针旋转:向后翻滚6.高度控制上抬左摇杆:升高下压左摇杆:降低7.航向锁定按下遥控器上的航向锁定按钮,锁定无人机飞行方向。
8.失控保护如遇失控情况,立即启用失控保护功能,无人机将自动返航。
四、口诀的实际应用与操作技巧实际飞行中,需要根据实际情况灵活运用口诀。
例如,在起飞和降落过程中,要随时关注无人机的高度,避免过高或过低;在姿态调整时,要掌握力度,避免过度倾斜导致失控。
五、总结掌握多旋翼无人机遥控器口诀,是无人机飞行的基础。
无人机驾驶员航空知识手册培训教材多旋翼
对于航模用的无刷直流电机,转速精度要求并不很高, 使用开环控制方式就可满足要求,
外转子电机内部构造
无刷电机拆解
四旋翼飞行器
AB通电
AC通电
四旋翼飞行器
四旋翼飞行器
四旋翼飞行器
霍耳效应器件, 霍耳效应测量器件可以根据转子不同位置时的 不同磁场方向分布情况输出位置信号, 一般在电机的不同位置上装三个霍尔传感器, 就可测出转子的位置,这就是所谓的有感无刷电机的驱动,
另外需要注意的是四根轴架的尺寸长度,保证4个螺旋桨不打架 就可以了,但要考虑到螺旋桨之间因为旋转产生的乱流互相影响, 建议还是不要太近,否则影响效率, 这也是为什么四轴用2叶螺旋桨 比用3叶螺旋桨多的原因之一 3叶的还有个缺点,平衡不好做 ,
四旋翼飞行器
德国MD4-1000四旋翼
四旋翼飞行器
德国MD4-1000四旋翼
与传统的直升机相比,四旋翼飞行器有下列优势:各个旋 翼对机身所施加的反扭矩与旋翼的旋转方向相反,因此当电 机 1和电机 3逆时针旋转的同时,电机 2和电机 4顺时针旋转, 可以平衡旋翼对机身的反扭矩,
四旋翼飞行器
四旋翼飞行器在空间共有 6个自由度 分别沿 3个坐标轴 作平移和旋转动作 ,这 6 个自由度的控制都可以通过调节 不同电机的转速来实现,基本运动状态分别是: 垂直运动 俯仰运动 滚转运动 偏航运动 前后运动和侧向运动
四旋翼飞行器
单体电压:标称3.7,满充4.2v,放电保护电压:3v 容量:蓄电池的总能量=电压X容量 放电倍率:以多少倍容量电流放电
最大放电电流=容量X放电倍率 充电倍率:以多少倍容量电流充电 能量密度:总能量/总重量
四旋翼飞行器
四旋翼飞行器
四旋翼飞行器
四轴机架:
无人机飞行操控技术 多旋翼原理
5.1.3 原理
四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。
四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
四旋翼飞行器的电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
在上图中,电机1和电机3作逆时针旋转,电机2和电机4作顺时针旋转,规定沿x轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多旋翼无人机的基本飞行动作
多旋翼无人机是一种由多个旋翼通过电机驱动实现飞行的飞行器。
在飞行过程中,多旋翼无人机可以进行多种基本飞行动作,包括起飞、降落、悬停、前进、后退、向左转弯、向右转弯、旋转等。
起飞是多旋翼无人机的基本飞行动作之一,其主要步骤为加速旋翼转速,提升飞行器,并保持平稳升空的姿态。
降落则与起飞相反,需要逐渐减速降落到地面,同时保持稳定的姿态。
悬停是多旋翼无人机的特有飞行动作,其需要通过调整旋翼的转速来控制飞行器保持在特定的位置上,同时保持水平姿态。
在悬停状态下,飞行器可以进行拍摄、观察等操作。
前进、后退、向左转弯、向右转弯都是多旋翼无人机的基本运动方式,其需要通过调整不同旋翼的转速来实现。
旋转则需要通过对旋翼转速的调整来实现飞行器在空中偏移的旋转运动。
以上是多旋翼无人机的基本飞行动作介绍,这些动作在无人机操作中非常常见,是无人机飞行的基础。
- 1 -。