足球机器人控制系统设计
基于MSP430的足球机器人的运动控制系统设计
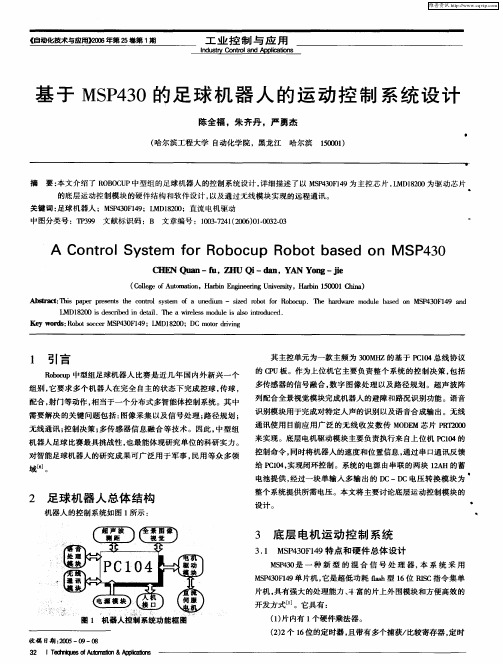
其 主控单元 为一 款主频为 30 H 0 M Z的基 于 P 14总线协议 C0
的 C U板 。作 为上 位机它主要负责 整个系统 的控 制决策 , P 包括 多传感器 的信号融 合 , 字 图像 处理 以及路 径规划 。超 声波 阵 数 列配合全景视觉模块完成机 器人的避障和路况识别功能 。语音
通讯使用 目前应 用广泛 的无 线收 发数传 M D M芯 片 P T0 0 OE R 20
来实现 。底层 电机驱动模块 主要 负责执 行来 自上位机 P 14的 C0 控制命令 , 同时将 机器人的速度和位置信息 , 通过串 口通讯反馈 给 P 14 实现闭环控制 。系统的 电源 由串联的两块 1A C0 , 2 H的蓄 电池提供 , 经过一块 单输入 多输 出 的 D c—D c电压转 换模块 为 ’
陈全福 ,朱 齐丹 ,严 勇杰
( 哈尔滨工程大学 自动化学 院 ,黑龙 江 哈尔滨 100 ) 50 1
摘
要: 本文介绍了 R B C P中型组的足球机器人 的控制系统设计 , OO U 详细描述 了以 M P 3F4 S4 0 19为主控芯 片 ,M 12 0为驱动芯 片 L D 80
‘
的底层 运动控制模 块的硬件结构和软件设计 , 以及通过无线模块实பைடு நூலகம் 的远程通讯 。
关键词 : 足球 机 器人 ;M P 3F4 ;L D 80 ;直 流 电机 驱 动 S40 19 M 120 中 图分 类 号 :T 39 文献 标 识 码 :B 文 章 编 号 : 10.2 120 ) 1 020 P9 0374 (06 0. 3.3 0 ’
A Con r s e f tolSy t m orRob c o u Rob tb s d On M SP 3 p o a e 40
机器人足球实验报告

机器人足球实验报告摘要:随着科学技术的不断发展,机器人技术日益成熟,机器人足球作为一种新型的竞技项目在世界范围内得到了广泛的关注和发展。
本实验以机器人足球为研究对象,旨在探究机器人在足球比赛中的性能表现,并对机器人足球比赛中的一些关键问题进行分析和解决。
一、引言机器人足球是一项融合了机械、电子、计算机等多学科知识的综合性竞技项目。
与传统足球不同,机器人足球通过机器人来参与比赛,融入了自动控制、图像识别、路径规划等技术,具有很大的研究价值和实践意义。
二、实验设计与方法本实验以一支机器人足球队为基础,通过对机器人的硬件和软件进行优化,提高机器人的灵活性和对足球的感知能力。
同时,在比赛中分析机器人队伍的战术布局和策略。
首先,我们对机器人的机械结构进行了改进,增加了关节活动范围,提高了机器人的灵活性,使机器人能更好地进行射门、传球和防守等动作。
其次,我们优化了机器人的电子控制系统,增加了感知模块和数据处理单元,提高了机器人对足球和环境的感知能力。
通过图像识别和目标检测算法,机器人能够更准确地识别和跟踪足球,并做出相应的动作。
最后,在比赛中,我们运用了智能算法和策略来指导机器人的行动,如路径规划、团队协作、进攻与防守等。
通过不断的调整和优化,提高了机器人足球队的整体战术水平。
三、实验结果与讨论在实验中,我们对机器人足球队的性能进行了评估。
通过与其他队伍的比赛,我们发现我们的机器人足球队在射门、传球和防守方面表现出色。
机器人的投射精度和射门速度较高,传球的准确性和防守的及时性也得到了很好的提升。
然而,我们也遇到了一些问题。
在比赛中,机器人的感知和决策能力仍然有所不足,有时会出现误判的情况,导致比分失利。
此外,机器人队伍的协作能力也需要进一步提高,以便更好地配合战术运作。
四、结论与展望通过本次实验,我们对机器人足球的发展和应用有了更深入的理解。
机器人足球作为一种新型的竞技项目,具有巨大的潜力和发展空间。
在未来,我们希望能够进一步完善机器人足球队的感知和决策能力,并加强机器人队伍之间的协作,提高机器人足球比赛的整体水平。
基于DSP的足球机器人设计
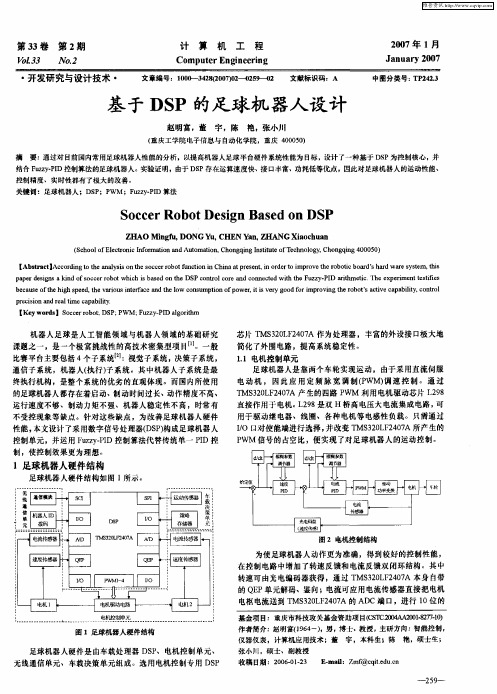
电动 机 , 因此 应 用 定频 脉 宽 调 制(WM) 速 控 制 。通 过 P 调 T 30 F 4 7 产 生的四路 P MS 2 L 2 0 A WM 利 用电机驱动芯片 L 9 28 直接作 用于 电机 。 2 8是双 H桥高 电压大电流集成 电路 , L9 可 用于驱 动继 电 、线 圈、各 种电机 等 电感性负 载。只需通过 器 I 口对使能端进行选择 , 改变 T 3 0 F 4 7 / O 并 MS 2 L 2 0 A所产 生的 P WM 信号的 占空 比,便实现 了对 足球机器人 的运动控制 。
结合 FzyPD控制算法 的足球机 器人 。 uz-I 实验证 明,由于 D P存在运算速度快 、 口丰 富、 S 接 功耗低等优 点 , 因此对足球机器 人的运动性能 、 控制精度、实时性都有 了极大 的改善 。 关键词 :足球机器人 ;D P WM ;FzyPD算法 S ;P uz-I
S c e b t sg s d 0 P o c rRo o De in Ba e n DS
ZIAO i gu D ONG CIEN n t M n f, Yu, - I Ya , ANG a c u n Xio h a
( c o l f l to i If r t n a dAuo t n Ch n qn si t f e h oo y C o g i g4 0 5 ) S h o o E e r nc n o ma o n t mai , o g ig I t ueo T c n lg , h n qn 0 0 0 c i o n t
p p rd sg sak n fs c e o o c sb s do eDS o to o ea o ne e t eF z y P D r h tc Th x ei n etfe a e e in i do o c rr b twhih i a e nt Pc nr lc r ndc n c dwi t u z - I ai mei ee p rme t siis h t h h t t
基于足球机器人的F2812事件管理器应用设计

某 单一 功 能 而 已 。 针 对 事 件 管 理 器 的 功 能 被 单 一化 、 局 限 化 的现 状 , 本 设 计 尝 试 从 对 足 球 机 器 人 的 设 计 出发 , 以 事件 管 理 器 为 核 心 ,实 现 最 大程 度 利 用 事 件 管 理 器 的 资 源 , 并 基 本 完 善 足 球 机 器 人 的 各项 功 能 。 即在 事 件 管 理 器 完 成 了 无 刷 直 流 电 机 双 闭 环控 制功 能 的基 础 上 ,利 用 F 8 2 件 管 理 器 的 四 个 2 1事
T C P l 分 别 组 成 了超 声 波 的 测 距 系 统 、 测温 系 统 和 红 外 x M  ̄脚
线 通信 的调 制 器 系 统 。
1 系统 硬 件 设 计 .
本 系 统 主 要 使用 T S 2 F 8 2 为足 球 机 器 人 小 车 的 控 M 3021作 制 芯 片 ,D P T S 2 F 8 2 的 两个 事 件 管 理 器 是 典 型 的 扩 S M 3 0 2 1 上 展 功 能 模 块 ,特 别 适 用 于 运 动 控 制 和 电机 控 制 等 领 域 , 并
器 、三 个 全 比较 单 元 、三 个 捕 获 单 元 或 正 交 编 码 脉 冲 电 路
等资源组成 ,极 大地方便 了现 代 电机控制 系统的设计 ,因
此 常 被 称 为 电机 控 制 管 理 器 。 事 件 管 理 器 可 以 同 时输 出 八 路P M 号 ,针 对 电机 控 制 的 设 计 , 只 会 使 用 到 其 中 的 一 W信 部 分 资 源 。在 作 者 了 解 到 的 一些 功 能 较 为完 整 , 同样 使 用 有 事 件 管 理 器 的 控 制 器 进 行 控 制 的 系 统 设 计 中 ,其 事 件
中型组机器人运动控制系统的FPGA设计

中型组机器人运动控制系统的FPGA设计作者:王全州,裴东,陶中幸,杨硕,崔涛,刘平和来源:《现代电子技术》2010年第14期摘要:以RoboCup中型组足球机器人为实验平台,提出一种基于FPGA的全方位移动足球机器人运动控制系统的实现方法。
首先分析和研究三轮全方位移动机器人的运动学特性,建立其运动控制模型,然后以FPGA为主要处理器,设计了PID速度闭环控制算法,实现了对机器人的精确控制。
实验发现,该设计方法具有很好的实时性,能够对全方位移动机器人进行快速、准确的控制。
关键词:RoboCup; 全方位移动机器人;FPGA; PID中图分类号:TN911; TP242 文献标识码:A文章编号:1004-373X(2010)14-0127-04Medium-sized Group of Robot Motion Control System Based on FPGAWANG Quan-zhou, PEI Dong, TAO Zhong-xing, YANG Shuo, CUI Tao, LIU Ping-he(College of Physics and Electronic Engineering,Northwest Normal University,Lanzhou 730070,China)Abstract: Making the medium-sized group of RoboCup soccer robot as experimental platform, an implementation of the omni-directional mobile robot motion control system based on FPGA is provided. In order to achieve precise control of the robot, the kinematics characteristics of the omni-directional robot with three orthogonal-wheels is analyzed and studied, the robot motion control model is built, and the speed closed-loop PID control algorithm using FPGA as its main processor is designed. It is found that the design method of theFPGA-based omni-directional mobile robot motion- control the omni-directional mobile robot rapidly and accurately.Keywords: RoboCup; omni-directional mobile robot; FPGA; PID0 引言目前,全方位移动机器人由于具有出色的灵活性,已经成为RoboCup中型组足球机器人比赛中最理想的选择。
机器人足球比赛无线通讯子系统的设计

Absr c : s d o h re nr d to ft e sr t r o r b ts c e ac y tm , t o t a t Ba e n t e b fi to ucin o h tucu e t o o o c rm t h s se i hec mmu c to u s se i ic se n d ti n ti niai n s b y tm sd s u s d i eali hs p p r Ado i oh mir — o rle a e. pt ng b t c o c ntolr AT8 52 a a c i e hp n 401 wih Bl e to h c r o 9S nd RF Trns ev rc i RF t u o t o e c mmu ia in e hnqu , a d n c to tc i e n a o tn o t r e in a e o mb d d r a—i p r tn y tm d pi g s fwa e d sg b s d n e e de e ltme o e ai g s se RTX51 t e c mmunc to u s se i d sg e , h o iain s b y t m s e in d. Th O e C B— mu c to u s se p o ie n e c e n r dil o niain s b y tm r vd sa f inta d ce b ec mmu c to lto m o h o ts c e t h s se i niain pa r frt e rbo o c rma c y t m. f Ke ywo d : o c rr b t c mmunc to u y tm nRF4 ERTOS RTX51 r s s c e o o o iain s bs se 01
机器人足球Robocup仿真系统研究与程序设计
R b cp teR b t r u o ra n ) o ou ( oo Wo dC pT unmet 即机 h l
形 。荷 兰阿姆 斯特丹 大 学 U A Ti a v rer 队采 用 l n球
器人世界杯 足球锦 标 赛 。它 通过 提供 一 个标 准 任务 来促 进分布式 人工 智 能 、 能机 器人 技术 、 其 相关 智 及 领域 的研究与发 展 。Rbcp包 括 多种 比赛 方 式 , oou 主
B a s r es 队把 R b c p问题 看 成 部 分 可 观 察 ri t m r 球 no oo u
个 比 中, 赛 通过比赛平台自 带的自动裁判或者通过人
为 裁判来做一 些规 则 限制 , 以确 保 比赛 的顺 利进 行 。
R b cp仿真 机器人 系统 的结构 图如 图 1 示 。 oou 所
进行 比赛 。Sce Sr r ocr e e 提供 了一个虚拟场地 , v 并 对比赛双方 的全部 队员 和足球 的状态 进行 仿真。
Ci t 当于球 员 的 大脑 , ln 相 e 指挥 球 员 的运 动 。Sre e r v 和 Cin 之 间的通信 是通 过 U P I l t e D /P协议 进行 的 , 竞 赛 者可 以使 用 支持 U P I D /P的任 何程 序 系 统 。在 一
第1 0卷
第2 7期
21 00年 9月
科
学
技
术
与
工
程
Vo. 0 N . 7 S p 01 1 1 o 2 e .2 0
17 一 1 1 ( 00 2 —7 30 6 l 8 5 2 1 )7 6 8 —4
S i n e Te h o o y a gne rn c e c c n lg nd En i ei g
足球机器人带球机构的优化设计
关键词 : 机器人; R o b o C u p ; 挑 球机 构 ; P o/ r E
Ke y wo r d s :r o b o t ; Ro b o C u p ; c k t h e b a l l me c h a n i s m; P o/ r E
中图分类号 : T PΒιβλιοθήκη 3 1 1 现有技术的研究
1 . 1根据挑 球方式的不 同,可分 为以下 两种方式 : ① 个机器人 的动作是不可预 测的, 这就要求机器人球员 不仅 低点 击球。在击球过程中 , 应将 击球杆 的位置 与球的底面
( 内蒙 古 工业 大学 机 械 学 院 , 呼 和 浩特 0 1 0 0 5 1 ) ( C o l l e g e o f Me c h a n i c a l E n g i n e e i r n g , I n n e r Mo n g o l i a U n i v e r s i t y f o T e c h n o l o g y , H o h h o t 0 1 0 0 5 1 , C h i n a )
摘要 : 为 了使足球机器人在运动时不必绕行对 方球 员而将球 挑起 传递给 己方球 员, 根据 所建的挑球机构模型 , 对 挑球 机构的动 力学模 型作详 细的分析, 并在 P o r / E中采用斜 函数法, 对挑球点的速度 、 加速度 、 位移等参数进行分析 , 得 出挑球 时的最佳初始 角度。 通
文献标识码 : A
文章编号 : 1 0 0 6 - 4 3 1 1 ( 2 0 1 3 ) 0 6 — 0 1 6 0 — 0 2
0 引 言
许多球队一直致力于 对机器人整体性能的研 究 , 以便 为提 国内很多高校都一直致力于 对足球机器人 的研 究, 以
机械毕业设计1305手动投球机器人控制系统设计正文
手动投球机器人控制系统设计1.绪论1.1机器人概述机器人科学是一门综合了机械、电子、材料、计算机、传感器、仿生、人工智能等多种前沿科学的综合性学科,是最能体现一个国家基础科学技术和制造业水平的学科之一。
1920年捷克作家卡雷尔·卡佩克发表了科幻剧本《罗萨姆的万能机器人》。
在剧本中,卡佩克把捷克语“Robota”写成了“Robot”,“Robota”是奴隶的意思。
该剧预告了机器人的发展对人类社会的悲剧性影响,引起了大家的广泛关注,被当成了机器人一词的起源。
在该剧中,机器人按照其主人的命令默默地工作,没有感觉和感情,以呆板的方式从事繁重的劳动。
后来,罗萨姆公司取得了成功,使机器人具有了感情,导致机器人的应用部门迅速增加。
在工厂和家务劳动中,机器人成了必不可少的成员。
机器人发觉人类十分自私和不公正,终于造反了,机器人的体能和智能都非常优异,因此消灭了人类。
卡佩克提出的是机器人的安全、感知和自我繁殖问题。
科学技术的进步很可能引发人类不希望出现的问题。
虽然科幻世界只是一种想象,但人类社会将可能面临这种现实。
为了防止机器人伤害人类,科幻作家阿西莫夫于1940年提出了“机器人三原则”:(1)机器人不应伤害人类;(2)机器人应遵守人类的命令,与第一条违背的命令除外;(3)机器人应能保护自己,与第一条相抵触者除外。
这是给机器人赋予的伦理性纲领。
机器人学术界一直将这三原则作为机器人开发的准则。
机器人真正出现在人类社会中的历史并不算长,1959年美国英格伯格和德沃尔制造出世界上第一台工业机器人,机器人的历史才算真正开始。
机器人发展到现在,可以分为三代:第一代是示教再现型机器人:它由人操纵机械手做一遍应当完成的动作或通过控制器发出指令让机械手臂动作,在动作过程中机器人会自动将这一过程存入记忆装置。
当机器人工作时,能再现人教给它的动作,并能自动重复的执行。
这类机器人不具有外界信息的反馈能力,很难适应手动投球机器人控制系统设计变化的环境。
基于足球比赛的机器人体系结构分析
/
\
.
匝
是 机器 人 体 具 有 前进 、后退 、向左 、向 主 要 完 成 机 器 人 体 系 统 与 通 讯 子 系 统 的
右、停止 、击球等基本动作
交流,控制传感器电路 、驱动电路等
图1 . 1 足 球 机 器人 的体 系构 架
可 由摄像头 、 图形采集卡等硬件设备和图象处理软 件组成. 视觉系统 的功能是根据颜色捕获 图象和计
( 双方机器人及球 的位姿 )提供给决策系统进行分
析 决策 之用 .
根据 R o b o C u p中型组的比赛规则 ,机器人 的
高度 不 能高 于 8 0 c m 物体 . 但 实 际情 况 是 , 在 智 能 中
的是智 能控制技术 、 信息处理技术等 ; 通讯系统展 现 的是传感技术 、 通讯技术等 ; 机器人体系统展现 的是机械电子学技术 、 机器人学技术等. 总的说来 ,
一
1 4—
上 添 加前 向视 觉 系统 为辅 助 的策略 ,结构 如 图 1 . 2 所示 . 针 对 这 种情 况 , 我 们 考 虑 在 足球 机 器 人 上 加
组织 的先后 成 立 ,对足 球 机器 人 技术 的发 展 起 到 了重 大 的促 进作 用 . 文 章 以下 将 对 基 于 足 球 比赛
的机 器 人 的各 个 系 统构 架 以及运 作 流程 进 行 深 人 的研 究 和 探讨 .
1 基 于足球 比赛的机 器 人体 系结构 分析
算位置 , 实时采集 、 处 理 比赛 场 景 , 并 将 辩 识 数 据
整体上来说 ,足球机器人一般可分 为四个部
分, 分 别是 : 视觉 系 统 、 决 策 系统 、 通讯 系 统 和机 器 人体 系 统. 在这 四个 系统 的研 究 上就 能展 现 科学 技 术 各个 领 域 的发 展 情况 . 如, 视觉 系统 展 现 的是 计 算 机 图形 学 技术 、 模 数转 换 技术 等 ; 决 策 系 统展 现
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要机器人足球和足球机器人是近几年在国际上迅速开展起来得高技术对抗活动。
本文以机器人世界杯为背景,采用数字信号处理器(DSP)作为核心芯片,研究足球机器人的控制系统设计以及相应的控制算法应用。
通过研究足球机器人的运动特性及控制,能为将来进一步探讨例如机器人路径规划、人工智能及多机器人合作等研究打下基础。
本文首先介绍了足球机器人的兴起,足球机器人的现状及其意义。
接着讨论了足球机器人的体系结构,机器人比赛的系统的组成,工作模式及系统结构,然后简要介绍了足球机器人的比赛的要求,并在最后讨论了控制的对象即我们设计的足球机器人的机电系统结构,包括所选用的电机及其各种运动结构的设计。
第三、四、五章是本文的核心部分,第三章讲述了关于机器人控制系统的硬件电路设计。
首先根据控制要求分析系统所需的硬件结构,然后针对每一部分进行电路设计分析。
第四章是关于控制系统的软件策略。
首先根据系统的控制求介绍了软件控制的总体思想与机构,然后分析机器人的动力学和运动学模型,在建立模型的基础上阐述算法的应用。
第五章是关于足球机器人的决策子系统的体系结构及其模型的建立。
关键词:足球机器人、TMS320LF2407、运动控制、建模、决策子系统ABSTRACTSoccer robots and RoboCup are the high technology activities in recent years that have attracted wide concerns among many countries. Based on RoboCup,this paper deal with the design and research of control system of robot by using a new core CPU (DSP). The main concerns of this paper are soccer robots and I hope with the design of soccer robots, some research on their locomotive properties and control systems, this could build up solid foundation for further research in such areas as Mobile Robot Path Planning, Artificial Intelligence and Multi-Agent Collaborative Behavior.Having introduced the rise of the soccer robot at first, current situation and meaning of the soccer robot. the impact of medium-sized group of robot competition system, the working model and system architecture, and then briefly introduced robot soccer competition requirements, and discussed in the final control of the object that we design the mechanical and electrical soccer robot system architecture, including the selection of the motor and the design of the structure of a wide variety of sports.Chapter three , four and five is mainly concerned. Chapter three is concenred with the hard ware design of control system. It firstly analyzes the hard ware structures and then there are detailed design and analysis on each structure. Chapter four deal with software strategies. Firstly it discusses he software structures according to the system requirements, and then it analyzes Dynamic Model and Movement Model,It analyzes use of some control arithmetic.The fifth chapter is on the soccer robot decision-making subsystem architecture modelKey words: Soccer robot、TMS320LF2407、Motion control、Modeling、Decision subsystem摘要 (1)ABSTRACT (2)第一章绪论 (5)1.1 足球机器人的简介 (5)1.2.1 RoboCup中型组足球机器人研究现状 (8)1.2.2 RoboCup中型组足球机器人研究意义 (8)1.4本章小结 (9)第二章足球机器人的体系结构 (9)2.1机器人足球的系统原理组成 (10)2.2足球机器人的系统工作模式 (12)2.3足球机器人的系统结构组成 (13)2.4足球机器人的技术要求 (14)2.5足球机器人机电结构系统[]6 (16)第三章足球机器人控制系统硬件设计 (20)3.1控制系统的硬件电路的组成结构[]7 (20)3.2.1 TMS320LF2407的简介 (21)3.2.2基于TMS320LF2407的主控系统设计[]10 (22)3.3电机驱动电路设计[][]1211 (24)3.3.1直流电机调速控制原理 (24)3.3.2直流电机驱动设计[]13 (25)3.4传感器电路设计[]7 (27)3.4.1加速度传感器电路设计[]14 (27)3.4.2近红外探测传感器的电路设计[]8 (30)第四章足球机器人的控制对象建模 (33)4.1控制系统的具体要求[][][]1715 (33)164.2足球机器人的动力学建模[]18 (35)4.3足球机器人的运动学建模[]19 (38)第五章中型足球机器人决策子系统分析与设计 (42)5.1 决策子系统分析 (42)5.1.1 决策子系统的任务 (42)5.1.2 决策子系统的特点 (44)5.2 决策子系统的体系结构 (44)5.2.1 决策子系统模型 (45)5.2.2 自上而下的分层递阶决策推理模型 (46)第六章总结与展望 (50)6.1 总结 (50)6.2 对今后工作的展望 (51)参考文献 (52)致谢 (54)附录一英文科技文献翻译 (55)附录二毕业设计任务书 (65)第一章绪论1.1 足球机器人的简介一、起源机器人足球的最初想法由University of British Columbia, Canada 的Alan Mackworth 教授于1992年正式提出。
他在On Seeing Robots 一文中以机器人足球为例,指出传统的机器人研究中存在的不足:Definite Knowledge, Complete Knowledge, Static Environment, Deterministic World, Discrete Sequential Actions...为解决这些不足,他和同事提出了一种新的机器人体系---- Situated Agents ,并实际设计了踢足球的机器人(见下图)。
他们指出:1-1 踢足球的机器人随后,众多学者和科技人员对机器人足球的可行性及技术问题进行了研究。
在一些实验室或研究所之间也相继开展了小型的比赛。
二、世界性比赛目前许多国家都开展了机器人足球比赛。
在世界上比较有影响的比赛主要有两个:•FIRA (Federation of International Robot-soccer Association 国际机器人足球联合会)•1995年,韩国的Jong-Hwan Kim 教授提出设想•1996年11月在韩国举行了第一届赛事•1997年正式成立了FIRA•RoboCup (The Robot World Cup Soccer Games and Conferences 机器人足球世界杯赛及学术大会)•1993年,日本的Minoru Asada 等学者创办了RoboCup•1997年8月,在日本举行了第一届RoboCup 赛事。
三、机器人足球赛的主要类型及规则机器人足球有仿真赛和实物赛两种。
仿真赛是在计算机上进行的虚拟比赛。
由比赛举办方提供仿真平台,参赛双方用各自开发的程序控制“运动员”进行比赛。
实物赛是由实际的机器人在指定的场地上进行的比赛,以下的分类都是对实物赛而言的。
从机器人的自主性方面看,有半自主型和全自主型。
半自主型机器人比赛中,允许参赛方用一台主机对机器人进行集中控制;全自主型中的机器人则是完全独立的,机器人只能依靠自身的设备去获取信息、做出判断、配合队友及实施行动。
从机器人的行走方式看,有轮式和足式。
轮式机器人靠轮子行走的,早期的机器人足球都是这种型式的;足式机器人用脚行走,又可分为多足和两足机器人。
1999年,RoboCup 首次开展四足机器人足球比赛。
完全类似人的两足机器人足球是机器人足球比赛的最高目标,但其涉及较为复杂的技术,目前还只是在足球赛上进行行走、避障碍、点球等表演,还不能真正进行足球比赛。
发展至今,机器人足球比赛已经拥有一整套规范和规则,诸如对球场、球、机器人的尺寸规定,对角球、界外球、任意球、点球等的定义,对球员犯规的判罚等。
机器人足球比赛每个半场一般只有十几分钟。
由于目前机器人的视觉系统主要依靠色彩信息对物体进行识别,所以球场内外各设备和器材的颜色都有比较严格的规定,参赛双方的机器人也必须贴上醒目的颜色标识。
主机与机器人或机器人与机器人之间靠无线电进行通讯,所以对无线电的使用也有相应规定。
四、机器人足球的相关技术机器人足球是一个综合性的项目,它涉及众多的传统理论和前沿技术。
机器人制造本身就集合了结构工程、电子电路、精密机械、仿生材料等多种技术,而计算机、自动控制、传感、无线通讯等技术则是机器人能够运动和踢球所不可缺少的,多个机器人之间的配合更是涉及比较复杂的关于多主体的协调、合作与策略等问题。