《机械创新设计》试题B
渔业机械创新设计与实践考核试卷
考生姓名:__________答题日期:_______得分:_________判卷人:_________
一、单项选择题(本题共20小题,每小题1分,共20分,在每小题给出的四个选项中,只有一项是符合题目要求的)
1.以下哪种机械不属于渔业机械?()
A.拖网机
B.起网机
C.船用空调
A.分拣机
B.冷藏设备
C.速冻设备
D.加工生产线
11.以下哪些因素会影响渔业机械的能耗?()
A.机械设计
B.操作习惯
C.维护状况
D.环境条件
12.以下哪些是渔业养殖智能化管理系统的组成部分?()
A.自动投饵系统
B.水质监测系统
C.养殖环境控制系统
D.数据分析系统
13.以下哪些措施有助于减少渔业机械作业对环境的影响?()
A.去鳞机
B.开肚机
C.清洗机
D.冷藏设备
17.以下哪些技术可以用于提高渔业机械的操控性能?()
A.电动助力
B.液压系统
C.电子控制系统
D.人工智能辅助
18.以下哪些措施有助于延长渔业机械的使用寿命?()
A.定期保养
B.避免超负荷工作
C.使用合适的操作方法
D.以上都是
19.以下哪些是渔业养殖中常用的水质调节方法?()
A.投饵机
B.增氧机
C.自动分拣机
D.冷藏设备
5.以下哪些措施有助于提高渔业捕捞机械的耐用性?()
A.使用不锈钢材料
B.表面涂层处理
C.防腐设计
D.以上都是
6.以下哪些是渔业资源保护的重要措施?()
A.限制捕捞季节
B.规定捕捞规格
机械创新设计(第九章)
二、原始机构选择
1.行星传动的选择——外激波摆 动活齿传动
(1)组成结构及传动原理 图912所示
外激波摆动活齿传动的传动原 理;当驱动力输入后,输入轴以等 角速度带动外激波器H绕固定主轴 线转动,由于外激波器内轮廓径向 尺寸的变化,产生向心的推力,推 动摆动活齿绕其在活齿架上的铰链 点摆动,通过摆动活齿中心轮高副 啮合运动,摆动活齿推动外齿中心 轮K以等角速度绕主轴线转动,使 与其固联的输出轴获得输出转速, 于是外激波摆动活齿传动完成了转 速变换运动。
罗伯特——契贝谢夫定理:由一个四杆铰链机构发生的 一条连杆曲线,还可以由另外两个四杆铰链机构发生出来。 或表达为同一连杆曲线,可以用三个不同的四杆机构来实现。
一、连杆点K位于连杆两铰链连线上的同迹连杆机构
图形缩放原理:图9-18a所示为一平行四边形导引机构, 当A点沿任意给定轨迹运动时,C点将绘出与A点相似但缩小了 的轨迹。
单运动的数目。被运动副限制了的相对简单运动称为约束μ
(Unfreiheit)。提供一个约束的运动副称为I级副,提供两个 约束的运动副称为Ⅱ级副,则空间机构自由度计算公式可以写 成
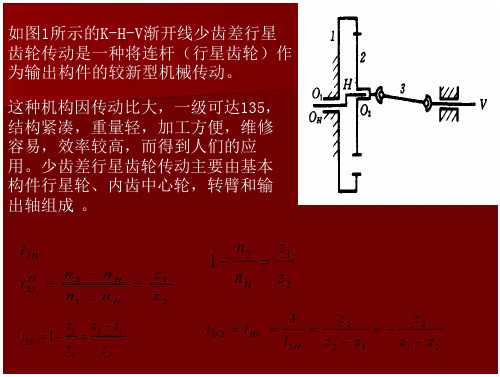
(3)传动效率高 同K-H-V型少齿差行星传动相比,因省去 了W输出机构,单级传动效率可达92%~96%。
4 结构紧凑,体积小,重量轻 5 制造简单、维修拆装方便
6 能单轴或多轴传输动力 5 .外平动齿轮传动存在的问题:
1 为避免传动发生渐开线齿廓重迭干涉,内齿轮副应采用 角变位齿轮传动中的正传动(x1+x2>0),并降低齿高,
式中 i1——第一级减速传动比; i2——第二级传动比。
第二节 活齿减速带轮机构
一、概述
将带传动和行星传动组合起来,在不增加带轮外廓尺寸的 条件下,研制出具有两种传动综合优良性能的行星减速带轮。 如:摆线针齿减速带轮、2K-H行星减速带轮、变速传动轴承减 速带轮、钢球行星摩擦减速带轮等。
机械产品设计与创新考核试卷

一、单项选择题
1. C
2. C
3. D
4. C
5. B
6. B
7. B
8. D
9. C
10. D
11. C
12. A
13. D
14. C
15. A
16. D
17. B
18. C
19. D
20. D
二、多选题
1. ABD
2. ABCD
3. ABC
4. ABC
5. ABCD
6. ABC
7. ABC
A.提高生产效率
B.降低生产成本
C.增强产品竞争力
D. A、B和C
3.下列哪种方法不常用于产生新的设计创意?()
A.头脑风暴
B.六顶思考帽
C.质量功能展开
D.闭关修炼
4.在产品的使用性能分析中,以下哪项指标不是动力学指标?()
A.扭矩
B.速度
C.精度
D.加速度
5.下列哪种材料最适合用于承受高压力的应用场合?()
7.为了提高产品的市场竞争力,产品设计应该注重________和用户体验。
8.在产品的制造过程中,________是确保产品质量的关键环节。
9.产品的________设计是确保产品在使用过程中安全可靠的重要措施。
10.在产品的生命周期中,________阶段是决定产品成本和性能的关键时期。
四、判断题(本题共10小题,每题1分,共10分,正确的请在答题括号中画√,错误的画×)
1.产品的设计过程中,美观性是最重要的考虑因素。()
2.创新设计只是大型企业才需要关注的问题,对中小企业来说并不重要。()
3.材料的选择只影响产品的机械性能,对产品的成本没有影响。()
G07机械设计与制造专业《机械创新设计》试题(C).doc

1、 技术创新的特点是以(2、 创造性思维的形成过程可分为(3、 综合创造的基本途径是(G07机械设计与制造专业《机械创新设计》试题(C )题号 . •—•四总分得分评卷一、填空题(每空1分,共20分))为导向,以()为目标。
)、悬想加工阶段,和顿悟阶段。
)和切割式综合。
A 、移植材料创造;B 、综合移植创造;C 、移植原理创造;D 、移植结构创造。
6、 创新技法中,“它山之石,可以攻玉”用来生动写照(A 、仿生法;B 、类比法;C 、联想法;D 、综摄法。
7、 下列选项中,能够提高精度的设计是( )。
4、创新设计具有( )、实用性和多方案选优的特点。
5综摄法遵循的两个基本原则是6连杆类配分为(两7根据设计的内容特点,创新设计可分为()和反求设计三种类型。
8设计一般分为产品规划、 )、施T •设计等四个阶段。
910反求设计分为(机电系统一般由驱动、 两个阶段。
) 和测控四部分组成。
11还原创造的基本模式是12、二23智力激励会贯彻的四条原则是(选择题(每题1分,共10分) 下列设计中,能使机构具有较好动力学特性的是(A 、适当选择原动机;B 、采用对称布置的机构;C 、选用广义机构;D 、适当选择运动副。
下列选项中,能使执行构件运动形式为间歇运动的机构是A 、摆线针轮机构; C 、曲柄滑块机构;双万向联轴器的设计,属于( A 、功能组合; )0)、以量求质原则和综合改善原则。
45B 、 B 、行星轮系;不完全齿轮机构。
)。
同类组合; 技术组合。
输送液体时,采用负压效应的是( A 、波纹管水泵; B 、 C 、虹吸原理;D 、 如下图所示,磁性轴承的设计属于以性泵;离心泵。
)oA 、误差均化;B 、载荷分担;C 、减小应力集中;D 、减小接触应力。
8、 利用液、气、声、光、电、磁等工作原理的机构,统称为A 、刚性机构;B 、柔性机构;C 、广义机构;D 、液动机构。
9、下列刻度盘形式中,误读率最高的是( )oA B C10、如图所示,被称为瓦特型的六杆组合运动链是()。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四 川 航 天 职 业 技 术 学 院 考 试 试 题
(2008~2009学年 第二学期
)
科目: 《机械创新设计 》A 专业班: 学生姓名: 学号: _ _____
密 封 线
第 1 页 共 3 页
G07机械设计与制造专业《机械创新设计》试题(A)
题号 一 二 三 四 五 总分
得分
评卷
一、填空题(每空1分,共20分)
1、设计一般分为产品规划、( )、( )、施工设计等四个阶段。
2、反求设计分为( )、( )两个阶段。
3、分离创造的基本途径是( )和市场细分创造。
4、按照设计要求,轴与轮毂的联接对相对运动自由度的限制可能有( )、( )、滑动联接和
移动、转动联接四种情况。
5、利用液、气、声、光、电、磁等工作原理的机构,统称为( )。
6、按需要产生的时差不同,分为( )和潜在需要。
7、连杆类配分为( )及( )两类。
8、机电系统一般由驱动、( )、( )和测控四部分组成。
9、还原创造的基本模式是( )。
10、智力激励会贯彻的四条原则是( )、( )、以量求质原则和综合改善原则。
11、综摄法遵循的两个基本原则是( )、( )。
12、联想法分为( )、( )、接近联想和强制联想。
二、选择题(每题1分,共10分)
1、下列设计中,能使机构尽可能简单的措施( )。
A、采用传动角较大的机构; B、适当选择运动副;
C、采用增力机构; D、采用对称布置的机构。
2、下列选项中,能使执行构件运动形式为往复摆动的机构是( )。
A、摆线针轮机构; B、行星轮系;
C、曲柄滑块机构; D、摆动导杆机构。
3、夯土机的设计,属于( )。
A、振动机构; B、惯性机构;
C、液动机构; D、气动机构。
4、将现有的不同技术、工艺、设备等加以组合,形成解决新问题的手段,这种发明方法称为( )。
A、技术组合; B、同类组合;
C、异类组合; D、功能组合。
5、如下图所示,此机构的设计能够实现( )。
A、机构运动链简短; B、尽量缩小机构尺寸;
C、传动角较大; D、间歇运动的特性。
6、创造原理中,“它山之石,可以攻玉”用来生动写照( )。
A、综合创造; B、移植创造;
C、分离创造; D、还原创造。
7、下列选项中,能够提高强度和刚度的设计是( )。
A、误差均化; B、方便装卡;
C、减小应力集中; D、简化装配、调整和拆卸。
8、波纹管水泵的设计,利用了输送液体原理中的( )。
A、毛细管效应; B、负压效应;
C、惯性力效应; D、虹吸原理。
四 川 航 天 职 业 技 术 学 院 考 试 试 题
(2008~2009学年 第二学期
)
科目: 《机械创新设计 》A 专业班: 学生姓名: 学号: _ _____
密 封 线
第 2 页 共 3 页
9、下列刻度盘形式中,误读率最低的是( )。
A B C D
10、如图所示,被称为斯蒂芬逊型的六杆组合运动链是( )。
A B C D
三、判断题(每题2分,共20分)
( )1、创新技法是解决创新设计问题的创意艺术,是人们对创造性思维和创造理论加以具体化应用的技巧。
( )2、创新设计不需要具有实用性。
( )3、反求设计中,实物反求的反求难度最大。
( )4、误差合理配置属于提高精度的设计。
( )5、将原始机构运动简图抽象为一般化运动链时,运动链的自由度允许改变。
( )6、方案评选时,一般用新颖性、先进性和实用性三条标准进行初评。
( )7、在一般情况下,应先考虑低副机构,而且尽量少采用移动副。
( )8、有序思维是一种运动的、不断调整的、不断优化的思维活动。
( )9、机构的运动构件与机架的转换,称为机构的倒置。
( )10、“人造海豚皮”的设计,属于外形仿生。
四、问答题(每题5分,共20分)
1、试述创造性思维的特征。
2、试述组合创新常用方法的形式,并举例说明。
3、进行机构形式设计时,应遵循哪些原则?
4、试述价值优化的基本途径。
四 川 航 天 职 业 技 术 学 院 考 试 试 题
(2008~2009学年 第二学期
)
科目: 《机械创新设计 》A 专业班: 学生姓名: 学号: _ _____
密 封 线
第 3 页 共 3 页
五、综合题(每小题10分,共30分)
1、采用强制判定法(FD法),确定洗衣机各评价目标的加权系数。
洗衣机六个评价目标的重要程度顺序为:价格、洗净度、维修性、寿命、外观,耗水量(其中维修性与寿命同等重
要)。
加权系数判别表
加权系
耗外寿维洗
价
∑gi∑ki
耗水量
外观
寿命
维修性
洗净度
价格
数
ki
水量观命修性净
度
格
2、试述运用再生运动链法进行创新设计的流程。
3、江泽民同志指出“创新是一个民族进步的灵魂,是国家兴旺发达的不竭动力”,谈谈你对创新的理解。