Kinect体感交互技术
Kinect体感交互技术1
Kinect设备的基本介绍
Kinect的工作原理
Kinect的研究现状和应用 发展前景
体感交互技术
体感交互技术是一项无需借助任何控制设备,
可以直接使用肢体动作与数字设备和环境互 动,随心所欲地操控的智能技术。该技术的 核心在于它让计算机有了更精准有效的“眼 睛”去观察这个世界,并根据人的动作来完 成各种指令。
Kinect 在智能家居的应用研究
Kinect体感交互技术
什么是体感交互技术? Kinect设备的基本介绍 Kinect的工作原理 Kinect的研究现状和应用
发展前景
继鼠标和多点触摸技术之后,Kinect 体感技术或将成为第三次
人机交互革命的原点,不仅因为其全新的操作方式,更因为其 背后所蕴含的创新精神。得益于这种新的人机交互技术,人对 机器的使用门槛在进一步降低,因为计算机已经越来越能读懂 人在自然状态所传递的命令。然而这项技术还很不成熟,有许 多需要改进和完善的地方,如Kinect 设备的识别只到人体头部、 躯干和四肢,对于手指的识别还不灵敏; 存在延迟和精度的问 题; 只能捕捉一些简单的动作; 点击动作需引入其他设备等。 因此,Kinect 体感技术的普适化征程才刚刚开始。Kinect 体感 技术现在实际应用的领域还很局限,将其拓展到更多的领域是 Kinect 体感技术未来发展的方向,如军事、勘探等。其中的机遇很多, 需要我们做的也很多,随着科学技术的发展,相信 Kinect 体感 技术能够克服实践应用中的困难,并在人机交互领域的应用中 得到更广泛、更深入的应用,发挥越来越重要的作用。
Kinect 在医学领域的应用研究
临床医学 远程手术 医学教育 医学数据调查明
Kinect 在商业领域的应用研究
体感(Kinect)技术开发和应用简介

体感(Kinect)技术开发和应⽤简介体感有多种;Kinect是微软做的;⼀微软 Kinect 技术简介Kinect使⼈机交互从⼆维扩展到三维,进⼊到⾮接触的交互体验。
Kinect硬件基本组成:传动马达,⽤于仰⾓控制;彩⾊摄像头;红外摄像头;红外投影机;麦克风阵列(4个);主板和芯⽚;底座,风扇等;⼯作原理。
Kinect传感器提供三⼤类原始数据:深度数据流(depth stream),彩⾊视频流(color stream),原始⾳频数据(raw audio stream);分别对应三个处理过程:⾻骼跟踪(Skeletal Tracking),⾝份识别(Identify),语⾳识别(Speech Pipeline)。
Kinect SDK应⽤层API包括三⼤组件:NUI API,SDK的核⼼,⽤来处理彩⾊图像流,深度数据,⾻骼跟踪,控制Kinect设备;Kinect Audio DMO,提供波束成形和⾳源定位功能;Speech SDK,⾳频、语⾳、多媒体API以及微软语⾳识别功能。
初始化API时,设定⾻骼跟踪选项,应⽤程序可以最多同时⾻骼跟踪2个⽤户,获得每个⽤户20个⾻骼关节点的三维坐标。
(Kinect SDK 1.7版本)开发所需技能。
C#,WPF;或C++;常⽤数据结构;常⽤解析⼏何、坐标变换;图形学基础,如位图、像素;熟悉⼀些3D开发环境更好。
系统要求:Kinect SDK可以免费下载;Kinect 传感器可在亚马逊或京东购买;Win7, VS2010以上。
Kinect的视距和⾻骼跟踪范围不是很⼤,⼤体是⼏⽶范围的⼀个⽴体空间。
⼀般开发之初可以先根据获取的⾻骼关节绘制⽕柴⼈,以初步了解开发。
⽕柴⼈就是指返回关节坐标给程序,⾃⼰连线来绘制⼀个⼈形。
Kinect可返回的⼈体关节和⽕柴⼈⽰例如下;⼆体感应⽤简介虚拟应⽤Kinect试⾐镜,基于kinect体感技术的试⾐镜,让客户能够⾼速的试穿⾐服;就是不⽤脱⾐服,可以快速看到⼀件件⾐服穿在⾝上的效果;3D建模3D摄像机, ⽤两个KINECT实现3D摄像机的基本效果;利⽤Kinect对⼈体进⾏3D建模,然后依据⼈体的3D信息,连接对应的塑模设备,塑造出⼈体塑像;机械控制⽤Kinect 操控遥控直升机;Kinect Robo,使⽤Kinect作为机器⼈的头,通过kinect检測周围环境,并进⾏3D建模,来指导机器⼈的⾏动;虚拟乐器空⽓吉他,通过Kinect⼿势操作虚拟吉他弹奏⾳乐;Kinect弹奏中国古代乐器,通过⼿势的改变能够演奏出不同中国古代乐器的声⾳;计算机相关应⽤Kinect⼿势操作浏览器,通过Kinect⼿势对浏览器进⾏翻页,下拉,放缩等操作;Kinect体感控制看⽚,应⽤在⼿术室,⼿术者可通过体感控制查看患者的影像资料;因为戴⼿套的情况下不⽅便⽤⿏标和键盘操作电脑;虚拟实验Kinect蜡笔物理,使⽤Kinect⼿势画图,通过体感控制所画图形,并使之具有物理特性,⽐⽅重⼒,吸引⼒等;也可以将主持⼈与背景图合成,实现类似天⽓预报导播。
Kinect技术简介
骨架追踪系统
▪ Kinect传感器 ▪ 寻找移动物体 ▪ Kinect的大脑 ▪ 模型匹配:生成骨架系统
模型匹配:生成骨架系统
▪ Kinect会评估Exemplar输 出的每一个可能的像素来 确定关节点
▪ 根据追踪到的20个关节点 来生成一幅骨架系统
骨架追踪系统
▪ Kinect传感器 ▪ 寻找移动物体 ▪ Kinect的大脑 ▪ 模型匹配:生成骨架系统
寻找移动物体
Kinect对景深图像 进行像素级评估,来辨 别人体的不同部位
Kinect采用分割策略将人体从背景环境中区分出来, 得到追踪对象背景物体剔除后的景深图像
骨架追踪系统
▪ Kinect传感器 ▪ 寻找移动物体 ▪ Kinect的大脑 ▪ 模型匹配:生成骨架系统
▪ Kinect骨架追踪系统的核心:CMOS红外传感器
▪ 该传感器通过黑白光谱的方式来感知环境: 纯黑代表无穷远,纯白代表无穷近;黑白间的
灰色地带对应物体到传感器的物理距离 它收集视野范围内的每一点,并形成一幅代表
周围环境的景深图像
▪ 传感器以每秒30帧的速度生成景深图像流,实时3D 地再现周围环境
Kinect引领人机交互变革
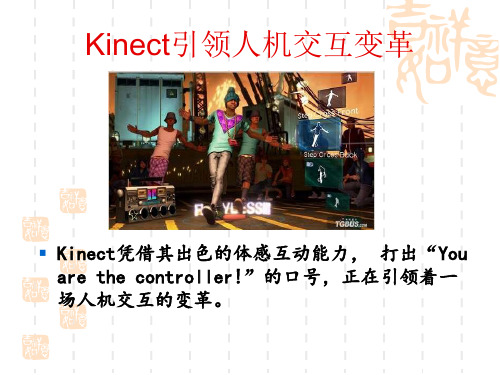
▪ Kinect凭借其出色的体感互动能力, 打出“You are the controller!”的口号,正在引领着一 场人机交互的变革。
什么是Kinect?
Kinect是一个Xbox360外接的3D体感摄影机 (如上图)利用即时动态捕捉、影像辨识、麦克风 输入、语音辨识等功能让玩家摆脱传统游戏手柄 的束缚,通过自己的肢体控制游戏。
▪ 散斑具有高度随机性,随着距离变换图案,空间中任何 两处的散斑都是不同的图案,等于将整个空间加上了标 记,所以任何物体进入该空间、以及移动时,都可确切 纪录物体的位置。
基于Kinect的体感交互式电子白板初探
基于Kinect的体感交互式电子白板初探随着教学信息化进程的加快推进,电子白板在基础教育领域将得到广泛应用,交互式电子白板作为一种运用于教室教学中的先进科技设备,融合了大屏幕投影、精确定位等多技术于一体。
电子白板的普及,有效地减少了板书的粉尘污染,提升了教学质量,缩短了板书时间,且更节能低碳。
交互式电子白板将是实现教育现代化的有力工具,也是未来的发展趋势。
现阶段电子白板的精确定位主要采用7种技术:电阻式、电磁式、红外线光学式、雷射式、超声波式及视像镜头光学式。
电子白板的优点有:(1)相对于传统投影机的单向式,使用互动电子白板使课程更为互动;(2)使教师专注于课堂,而不是处理计算机或投影机等技术上的问题;(3)通过电子白板的软件,利用软件的记录功能,使课堂上临时或即兴的教学亦得以记录;(4)增加课堂的趣味。
然而综合现阶段电子白板的应用情况,电子白板还存在一些问题:(1)售价比较昂贵;(2)白板的清洁及保养问题;(3)在使用时感应触摸板上无法随意感应挥洒,需要背对学员,无法得知当下教学成果;(4)在电力供应不稳定的地方不宜使用。
而Kinect设备的出现,为这些问题的解决提供了技术支撑。
笔者通过整合目前已开放源码的Kinect来做影像辨识,结合两者功能,探讨基于Kinect的体感交互式电子白板的设计与应用,让教师通过简单的手势去操作屏幕,直接面对学生,达到学习最高效率,使上课更轻松,台上台下互动更加密切。
通过在投影的白板上开启功能选单、笔迹辨识、图像的缩放旋转,Kinect接收影像数据并在PC上进行影像辨识,将动作结果显示于投影的白板上,让教师的教学更为活泼,也更轻松省力。
一、基于Kinect的体感交互式电子白板,1 KincectKinectt21是由微软公司开发的一款姿态传感输入设备,它主要由一个摄影机、一对深度传感器、一组麦克风及一个马达构成,Kinect具备即时动态捕捉、影像辨识、麦克风输入、语音辨识、社群互动等多种功能。
kinect体感原理

kinect体感原理Kinect体感原理。
Kinect体感技术是微软公司推出的一项基于动作捕捉和语音识别的人机交互技术。
它通过结合深度摄像头、红外线传感器和麦克风阵列,能够实现对用户的动作、姿势和语音的实时捕捉和识别,从而实现与电脑、游戏机等设备的自然交互。
那么,Kinect体感技术的原理是什么呢?首先,我们来看一下Kinect体感设备的硬件组成。
Kinect包含了一个RGB摄像头、一个深度传感器和一个多阵列麦克风。
RGB摄像头用于捕捉用户的图像,深度传感器则能够实时获取用户和环境的深度信息,多阵列麦克风则用于捕捉用户的语音指令。
这些硬件设备共同工作,能够实现对用户动作、姿势和语音的高效捕捉和识别。
其次,Kinect体感技术的原理主要基于计算机视觉和模式识别技术。
当用户站在Kinect摄像头前时,RGB摄像头会实时捕捉用户的图像,深度传感器会获取用户和环境的深度信息。
通过计算机视觉技术,Kinect可以识别用户的身体轮廓、动作和姿势,从而实现对用户动作的实时捕捉和分析。
同时,通过模式识别技术,Kinect可以识别用户的手势、面部表情和语音指令,从而实现对用户交互行为的智能识别和响应。
另外,Kinect体感技术还利用了机器学习和人工智能技术。
通过大量的数据训练和模型优化,Kinect可以不断提升对用户动作、姿势和语音的识别准确度和稳定性。
同时,Kinect还能够根据用户的交互行为和习惯,实现个性化的交互体验,从而提高用户的满意度和粘性。
总的来说,Kinect体感技术的原理是基于深度摄像头、红外线传感器和麦克风阵列的硬件设备,结合计算机视觉、模式识别、机器学习和人工智能等技术,实现对用户动作、姿势和语音的实时捕捉和识别,从而实现自然、智能的人机交互。
这项技术的问世,为电脑、游戏机等设备的交互方式带来了革命性的变化,也为人们的生活和娱乐带来了全新的体验。
Kinect体感技术的不断发展和应用,也将为人机交互领域带来更多的可能性和机遇。
kinectv1原理
kinectv1原理Kinect是微软公司开发的一款体感控制设备,它可以通过感应器和摄像头捕捉用户的动作和声音,实现人机交互。
Kinect的第一代产品被称为Kinect V1,它的工作原理是基于红外线深度感知技术和RGB摄像头。
Kinect V1内部配备了一个红外线发射器和一个红外线摄像头。
当用户站在Kinect面前时,红外线发射器发射一束红外线光,这些光线会被用户身体表面的物体反射回来。
红外线摄像头会捕捉到这些反射光,并通过计算光的飞行时间,得到用户和Kinect之间的距离信息。
通过对用户和Kinect之间的距离信息进行处理,Kinect V1可以生成一个三维深度图像。
这个深度图像可以用来识别用户的骨骼和关节位置,实现动作捕捉功能。
Kinect V1还内置了一个RGB摄像头,可以捕捉用户的彩色图像,从而提供更加真实的交互体验。
在Kinect V1中,红外线发射器和红外线摄像头之间的距离非常关键。
为了保证测量的准确性,Kinect V1会根据用户所在的环境自动调整红外线发射器的功率和摄像头的曝光时间。
这样可以在不同的环境中获得稳定而准确的深度图像。
除了深度图像和彩色图像外,Kinect V1还可以通过内置的麦克风阵列捕捉用户的声音。
麦克风阵列可以通过声音的到达时间差和声音的强度差来确定声源的位置,从而实现音频定位功能。
Kinect V1的工作原理使得它在游戏、虚拟现实、体感交互等领域具有广泛的应用。
在游戏中,Kinect V1可以将玩家的动作转化为游戏角色的动作,实现更加真实的游戏体验。
在虚拟现实中,Kinect V1可以实时捕捉用户的动作和表情,将用户的虚拟形象呈现在虚拟世界中。
在体感交互中,Kinect V1可以通过识别用户的手势和声音指令,实现与电脑的自然交互。
Kinect V1利用红外线深度感知技术和RGB摄像头,可以捕捉用户的动作和声音,实现人机交互。
它的工作原理简单而高效,为游戏、虚拟现实和体感交互等领域带来了许多创新和可能性。
浅谈kinect体感技术的应用

浅谈kinect体感技术的应用随着计算机技术的不断发展,传统的基于鼠标和键盘的接触式人和计算机交互模式,逐渐会被过渡到非接触式的体感交互模式。
这种交互模式更接近人的日常行为,通过动作、手势、语音等来控制计算机的操作。
在这种体感的交互模式中,kinect因不需要额外的穿戴电子传感器产品而可以直接完成人机交互而深受欢迎。
传统的教学模式中,就是老师在上面讲,学生在座位上听,一堂课下来,将本来应该为主角的学生牢牢的捆绑在课桌上,而本来应该为配角的老师却往往唱独角戏,这样的教学效果可想而知。
Kinect技术的出现,可以让学生充分融入课堂,学生可以充分运用肢体动作,参与到课堂上来,特别广告设计类的课程,学生可以通过kinect的设备与专门的装置进行互动,直接看到实际的设计效果,从而对广告设计的色彩、内容进行修改,对广告效果进行预测等。
不但可以提高学生的学习兴趣和积极性,而且也极大提高学生的学习效率。
Kinect是微软在2009年6月2日的E3大展上,正式公布的XBOX360体感周边外设。
Kinect彻底颠覆了游戏的单一操作,使人机互动的理念更加彻底的展现出来。
它能捕捉操作者全身的动作,用肢体来代替游戏操作工具,并且可以捕捉声音,全方位立体式的指挥系统运行。
微软发明kinect的本意是用在游戏行业上,但是Kinect的应用显然不只是在游戏上,现在已经用到各个行业中。
比如广告产业、教育教学行业等、试衣镜、运动捕捉等方面已得到了广泛的应用。
Kinect不足之处:1.对计算机的配置要求比较高。
因为Kinect产生的数据量比较大,所以占用资源比较多,普通低配的机器没办法及时处理这些数据。
2.有延时。
相对于接触式交互模式来讲,Kinect技术有相当长的时延。
3.Kinect技术目前对动作的支持还十分有限。
主要表现在两个方面,一是距离方面,Kinect只能捕捉1.5-3米之间的动作,在这个范围之外,动作的信息误差比较大。
kinect原理
kinect原理
Kinect原理。
Kinect是由微软公司开发的一款基于体感技术的设备,可以实现人体姿势识别、语音识别和深度感知等功能。
它的原理是通过红外线投影器和红外线摄像头来获取用户的深度信息,同时通过彩色摄像头来获取用户的图像信息,再通过内置的传感器和算法进行数据处理,最终实现对用户动作的捕捉和识别。
首先,红外线投影器会发射一束红外线,这些红外线会在场景中形成一种结构光,投影到用户身上形成一张网格。
然后,红外线摄像头会捕捉到这些被用户身体表面反射的红外线,通过计算被反射的红外线与投影时的位置偏差,就可以得到用户与设备之间的距离,从而实现对用户的深度感知。
其次,彩色摄像头会捕捉到用户的图像信息,这些图像信息会与深度信息进行
融合,通过算法进行分析处理,识别用户的身体轮廓和姿势,从而实现对用户动作的捕捉和识别。
最后,通过内置的传感器和算法对获取的深度信息和图像信息进行处理,可以
实现对用户的手势、动作和语音的识别。
用户可以通过手势来操作游戏、应用程序或者电视,也可以通过语音来控制设备的操作,实现更加自然、便捷的交互方式。
总的来说,Kinect的原理是基于红外线投影器、红外线摄像头和彩色摄像头获
取用户的深度信息和图像信息,通过内置的传感器和算法进行数据处理和分析,最终实现对用户动作和语音的识别和交互。
它的出现极大地丰富了人机交互的方式,为游戏、娱乐和健康等领域带来了许多创新应用,也为未来的科技发展带来了更多可能性。
Kinect的原理虽然复杂,但它的应用却是如此简单、直观,让人们更加自然地与设备进行交互,为我们的生活带来了更多便利和乐趣。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
现代通信理论与先进技术之Kinect体感交互技术摘要:本文通过查阅国内外相关文献,了解了人机交互技术尤其是可以实现高效人机交互的Kinect体感技术的发展方向,并以此为研究基础,综述了Kinect体感技术的理论基础和国内外应用现状,讨论了其广泛应用需要解决的技术难题,展望了其在人机交互领域的应用前景,得出了Kinect体感技术有利于推动人机交互的智能化进展,是人机交互改革的又一个新起点的结论。
关键词:Kinect体感技术;人机交互;虚拟现实;人工智能引言继鼠标和多点触摸之后,体感交互被称之为“第三次人机交互革命的原点”。
人机体感交互的出现是人与机器对话方式回归自然的重要转折,体现了人们对“以人为中心”设计理念的不断追求。
人机交互[1](Human-Computer Interaction,HCI) 是研究人与计算机及其相互作用的技术,其研究目的在于利用所有可能的信息通道进行人机交流,提高交互的自然性和高效性。
目前人与计算机交互的方式只局限于鼠标与键盘,正是由于这种传输方式的单一性阻碍了人机交互的进一步发展,人机交互中输入输出效率之间的差距变的越来越大。
随着科学技术的高速发展,更高层次的人机交互理念对交互方式提出了巨大的需求,众多科研人员开始对新的交互技术的多通道界面展开研究,目前的研究内容主要是集中在手势输入、语音识别及感觉反馈等方面。
而kinect 体感技术的出现为促进人机交互的发展具有重要意义,kinect 作为新一代的体感设备,可以依靠实时捕捉使用者的动作、面部识别及语音识别就可以达到输入功能。
这一特性很好地填补了现有人机交互技术的缺陷,并且促使kinect 体感技术成为人机交互领域的一个研究热点。
与传统输入设备不同的是,kinect 设备可以实现直接用使用者的身体来控制终端,用这种最自然的方式与终端进行交互的特点贴近了人机交互对自然性的要求,kinect 体感技术对人机交互理念的实现起到了重要的促进作用。
因此研究kinect体感技术在人机交互领域中的应用对其今后的发展具有很大的必要性。
1 Kinect设备的基本介绍Kinect[2],[3],[4]是由微软公司开发的一款姿态传感输入设备,作为Xbox360 外接的3D 体感摄影机,利用即时动态捕捉、影像辨识、麦克风输入、语音辨识、社群互动等功能让用户摆脱传统输入设备的束缚,通过自己的肢体控制终端。
图1 所示是Kinect 设备的整体结构图。
Kinect 设备的整体结构及功能:1.1 RGB 摄像头用来获取640X480 的彩色图像,每秒钟最多获取30 帧图像,根据在Kinect 设备视野范围内移动的一个或两个人的图像进行骨骼追踪,可以追踪到人体上的20 个节点。
1.2 3D 深度传感器分别为红外发射器和红外线COMS 摄像机,用来侦测3D 影像。
1.3 数组式麦克风与Microsoft.Speech 的语音识别API 集成,使用一个具有消除噪音和回波的四元麦克风组,能够把声源附近有效范围之内的各种信息捕捉到。
用于语音识别并具有降噪功能。
基于以上功能,Kinect 设备不需要使用任何控制器,只需依靠实时捕捉使用者的3D 动作、面部别和语音识别即可达到输入的功能[5]。
图 1 Kinect 整体结构图2基于Kinect的人机交互的工作原理2.1 Kinect传感Kinect追踪处理流程的核心是一个无论周围环境的光照条件如何,都可以让Kinect感知世界的CMOS红外传感器。
该传感器通过黑白光谱的方式来感知环境:纯黑代表无穷远,纯白代表无穷近。
黑白间的灰色地带对应物体到传感器的物理距离。
它收集视野范围内的每一点,并形成一幅代表周围环境的景深图像。
传感器以每秒30帧的速度生成景深图像流,实时3D地再现周围环境。
就像你玩pin point impression 3D针模玩具一样,将你的手(或者脸,如果你愿意的话)按压在这种玩具上,就可以产生你身体某一部位的简单3D模型。
如图2所示。
图2 pin point impression 3D针模玩具2.2 寻找移动部位Kinect需要做的下一件事是寻找图像中较可能是人体的移动物体,就像人眼下意识地聚焦在移动物体上那样。
接下来,Kinect会对景深图像进行像素级评估,来辨别人体的不同部位。
同时,这一过程必须以优化的预处理来缩短响应时间。
Kinect采用分割策略来将人体从背景环境中区分出来,即从噪音中提取出有用信号。
Kinect可以主动追踪最多两个玩家的全身骨架,或者被动追踪最多四名玩家的形体和位置。
在这一阶段,我们为每个被追踪的玩家在景深图像中创建了所谓的分割遮罩,这是一种将背景物体(比如椅子和宠物等)剔除后的景深图像(如图3)。
在后面的处理流程中仅仅传送分割遮罩的部分,以减轻体感计算量。
图3 Kinect追踪的骨架图2.3 Exemplar(模型)系统:判断关节点真正的“魔术”在这里发生。
分割化人的图像的每一个像素都被传送进一个辨别人体部位的机器学习系统中。
随后该系统将给出了某个特定像素属于哪个身体部位的可能性。
比如,一个像素有80%的几率属于脚,60%的几率属于腿,40%的几率属于胸部。
这时候并不是就把几率最大的可能性当作结果,而是将所有的这些可能性输入到Exemplar(模型)系统进行处理中并且等到最后阶段再做判断。
数以TB计的数据被输入到集群系统中来教会Kinect以像素级技术来辨认手、脚以及它看到的其他身体部位。
下图(如图4)就是我们用来训练和测试Exemplar 的数据之一。
图4 训练和测试Exemplar的效果图2.4模型匹配:生成骨架系统处理流程的最后一步是使用之前阶段输出的结果,根据追踪到的20个关节点来生成一幅骨架系统。
Kinect会评估Exemplar输出的每一个可能的像素来确定关节点。
通过这种方式Kinect能够基于充分的信息最准确地评估人体实际所处位置如图5所示。
另外我们在模型匹配阶段还可以附加一些输出滤镜来平滑输出以及处理闭塞关节等特殊事件。
图5 生成的骨架图3 Kinect体感技术的国内外研究现状Kinect 传感器凭借其特性已经应用在医学、商业、计算机科学及机器人等很多领域,下面就其在相关领域的应用进行综述。
3.1 Kinect 在医学领域的应用研究Kinect 体感技术在医学领域的应用研究目前主要体现在临床医学、远程手术、医学教育和医学数据调查四个方面。
3.1.1 临床医学在临床手术中,有必要保持接受手术的病人周围的一切都是无菌的。
然而,在手术中,外科医生还需要从计算机上查看患者的临床影像资料,计算机不是无菌的。
传统的医生查看资料的方式既耗时又增加患者的感染几率。
而在手术过程中借助Kinect 设备可以有效的缓解这一弊端。
由瑞士伯尼尔大学Michael. Tully 教授等研究人员利用Kinect 设备帮助医生解放了双手,医生无需像传统方式那样亲自接触患者的影像资料,只需要用手做出摆动就可以控制专为医疗图像浏览而设计的图像处理应用程序——OsiriX PACS[6](picturearchiving andcommunication system:医学影像存档与通信系统)。
该项研究利用Kinect 非触摸的体感方式[7]可以更符合手术过程中的无菌化操作的要求并能有效避免手术过程中的交叉感染。
国内西京医院骨科手术中也已经实现了使用Kinect设备体感控制患者的影像资料。
Kinect 设备同样在多伦多新宁医院(Sunnybrook Hospital) 得到了应用,它允许外科医生在手术过程中以不用手的姿势来操纵计算机屏幕上的核磁共振成像图像[8]。
这项新技术使手术过程更容易并且节省了手术所需的时间,临床手术中Kinect 体感技术的应用必将成为一种趋势。
3.1.2 远程手术远程手术是将虚拟现实技术与网络技术结合,可以使得医生根据传来的现场影像对远程的患者进行手术操作,其一举一动可转化为数字信息传递至远程患者处,控制当地的医疗器械的虚拟现实系统。
运程手术的技术目前尚未成熟,而Kinect 体感技术的介入可以增加远程手术的可行性。
西雅图华盛顿大学Biorobotics 实验室的Chizeck 等让Kinect传感器在远程手术过程中为外科医生提供触觉反馈。
他们将Phantom Omni[9]触觉设备与Kinect 设备连接,提供电阻式的反馈,以Kinect 体感技术帮助建立物体的3D 模型,并将数据转换为触摸反馈。
这项研究实现了只要有卫星天线车的地方,医生就可以使用Kinect 设备远程手术,因此可被广泛应用于救灾或者战场。
3.1.3 医学教育德国慕尼黑工业大学的一名学术研究员发明了一款命名为“The magic mirror—魔镜”的设备。
它是专门为方便解剖课程的教学所设计的,系统能够制造一种镜像的幻觉,让使用者像是在身上开个“洞”,看到自己的内脏。
Kinect 体感技术在现代医学教育中的研究,是现代医学教育方式的一个新的突破,若能得到实际应用则会对实现现代医学教育跨越式的发展具有十分重要的意义。
3.1.4 医学数据调查明尼苏达大学研究院的教授kolaos Papanikolopoulos 及研究员们借助Kinect 感应器观察并分析儿童的反常行为和动作,然后根据得到的客观数据衡量儿童的失调症状如孤独症、强迫症等,与以往的评估方式相比,这种基于Kinect 体感技术观察和分析的方式会使得评估过程更简单数据也更真实。
3.2 Kinect 在商业领域的应用研究Kinect 凭借其出色的互动能力已经在商业方面得到了实际应用,如俄罗斯一家名为AR Door 的科技公司于2011 年 5 月运用Kinect 体感外设技术发明的一款“试衣魔镜”,当购物者站在这虚拟试衣镜前时,装置将自动显示试穿新衣以后的三维图像。
俄罗斯的高街时装品牌Top Shop 在自己的店中安装了这款“试衣魔镜”,俄罗斯的消费者们成为率先体验这一高科技所带来的便利的受惠者。
除了实际应用的成果以外,还有一些取得较好效果的研究成果,如黄康泉[10]开发的CoolView 视频会议系统中整合了Kinect 设备的部分功能,实现了手势控制PPT、自动识别与会人员的举手发言请求及实时3D 捕获与显示等功能,提高了视频会议的交互性和真实感,该系统的实现进一步论证了Kinect 体感技术在视频会议中的实用价值以及对视频会议系统发展创新的积极现实意义。
3.3 Kinect 在科技助残领域的应用研究残障人是一个特殊困难的弱势群体,如何使弱势人群无障碍地融入到社会生活当中一直都是各国关注的热点,Kinect 体感技术的出现为推动这一改善事业的进展起到了积极的作用,并且由已经取得的研究成果体现出Kinect 体感技术在改善残疾人生活状况方面有着十分重要的现实意义。