上海光源准直测量方案设计
结合激光准直的二维转角动态测量系统
LOU Zhi-bin1,ZHAO Hui 2,LIU Quan2,ZHENG Chao2,TAO Wei 2*
(1.Shanghai Academy of Sciences,Shanghai 201203,China; 2.Department of Instrument Science and Engineering,
楼 志 斌1,赵 辉2,刘 权2,郑 超2,陶 卫2*
(1.上海科学院,上海 201203;2.上海交通大学 仪器科学与工程系,上海 200240)
摘要:为了克服现有二维转角动态测量方法结构复杂、成本昂贵的缺点,提出了结合激光准直的二维转角 动 态 测 量 方 法 。 首先,根据二维转角测量的关键问题提出基于激光准直的测 量 方 法,采 用 准 直 激 光 作 为 测 量 基 准 ,以 远 端 的 位 置 探 测 器 作为检测器件。接着,设计测量系统和各组成模块,根据测 量 要 求 对 系 统 中 的 关 键 模 块 进 行 设 计 和 优 化 。 然 后,具 体 设 计系统中的测量算法,完成测量模型建立。最后,在±2°范围内进行实验测试和 分 析。 实 验 结 果 表 明:系 统 可 动 态 测 量, 稳定性好,测量重复性误差为1μrad,X 轴非线性误差为1.8%,Y 轴 非 线 性 误 差 为 1.7%,动 态 带 载 响 应 频 率 在 ±0.01° 内 优于200 Hz,基本满足二维转角测量的高精度、高重复性、高稳定性的要求。 关 键 词 :激 光 准 直 ;二 维 转 角 ;动 态 测 量 ;光 斑 位 置 中 图 分 类 号 :TN249 文 献 标 识 码 :A doi:10.3788/OPE.20192703.0561
上海光源工程首批光束线站简介
上海光源工程首批光束线站简介生物大分子晶体学光束线站衍射光束线站XAFS光束线站硬X射线微聚焦及应用光束线站X射线成像及生物医学应用光束线站简介 软X射线谱学显微光束线站X射线小角散射光束线站生物大分子晶体学光束线站1.线站科学目标与设计指标生物大分子晶体学光束线站瞄准生命科学前沿若干领域,拟开展生物大分子复合物结构、膜蛋白结构以及面向结构基因组学的大规模、高通量蛋白质结构和功能研究等。
在SSRF 生物大分子晶体学光束线站上,将可以利用以下多种实验方法开展生物大分子结构研究:⎯ 多波长反常衍射方法(MAD );⎯ 单波长反常衍射方法(SAD );⎯ 同晶置换、分子置换等其它单波长实验方法。
光束线站设计主要指标如下:z 光子能量范围: 5∼18 keVz 能量分辨: <2×10-4z 样品处光通量: ~3×1012phs/s (12keV@300mA)z 聚焦光斑尺寸: ~130×40 μm 2 (12keV)z 光束发散角: ~0.3×0.1mrad 22.光束线设计特点束线选取小间隙波荡器作为辐射光源,以得到高亮度的同步光束。
束线光学结构原理示意图如下所示。
现在的设计方案充分利用了波荡器辐射低发散角的特性,只采用了一个晶体单色器和一个超环面反射聚焦镜,束线所用的光学部件数量达到了最低限度,既降低了造价又能提高光子通量与束线的稳定性。
m U25 DCM Toroidal mirror focus 束线光学结构示意图(上:侧视图,下:俯视图)3.实验站设置实验站的布置如下图所示,主要设备配置如下:实验站布置图1) 样品台测角仪系统拟采用Kappa转角仪(Phi,Kappa,Omega三轴转角仪),转角仪顶端的样品台可进行三维平动。
利用Kappa转角仪可选择最佳晶向收取衍射数据。
2) CCD探测器及定位支撑系统CCD探测器的主要指标要求如下:灵敏面积:> 200×200 mm;空间分辨:< 100 μm;读出时间:≤ 1s。
上海光源首批插入件积分场测量及垫补的开题报告
上海光源首批插入件积分场测量及垫补的开题报告开题报告:上海光源首批插入件积分场测量及垫补一、项目背景上海光源是中国第一个第三代综合光源,初步设计为光滑光源,后更改为话斯分布储存环。
光源拥有23个光束线,其中8个是束线插入件。
插入件对光源的性能和稳定性有着非常重要的作用,对于保证光源各个实验线的稳定性和高质量的光束要求,插入件的积分场测量和垫补就显得至关重要。
二、研究内容本项目将针对上海光源首批8个插入件进行积分场测量和垫补研究,具体研究内容如下:1. 插入件光路的光学测量和建模2. 插入件所产生的磁场相关参数的测量和建模3. 对于测量数据和模型的验证,包括场的辐射特性、光束形状和通量的测量4. 基于测量数据给出垫补方案,使插入件能够满足实验设计的要求5. 对于插入件测量和垫补的数据进行记录和归档三、研究意义1. 为光源插入件的优化提供依据2. 为光源实验线的性能提升提供保障3. 对于光源的长期稳定运行提供保障四、研究方法1. 实验测量:通过光学测量和磁场测量仪器,对插入件的光学和磁场特性进行测量和建模2. 数值模拟:通过ANSYS软件对插入件的场分布进行模拟和对比,为实验结果提供依据3. 垫补方案优化:根据实验结果和各个插入件垫补的前期工作,对垫补方案进行优化和完善五、研究进度安排1. 插入件光路的光学测量和建模:6月-7月2. 插入件所产生的磁场相关参数的测量和建模:7月-8月3. 对于测量数据和模型的验证:8月-9月4. 基于测量数据给出垫补方案:9月-10月5. 对于插入件测量和垫补的数据进行记录和归档:10月-11月六、预期成果1. 插入件的积分场测量和垫补方案2. 测量和建模的数据和文献3. 插入件垫补的效果验证数据七、团队成员本项目的研究团队由上海光源技术部的专家和工程师组成,拥有丰富的实验和理论经验,具备开展本次研究的能力。
八、参考文献1. 许多方,肖伟祖,唐亚东,等. 上海光源插入件EPU-34自激振荡场约束细致建模[J]. 高能物理与核物理,2020,44(12):121201.2. 施露坤,黄海斌. XFEL射线产生和垫补方法研究[J]. 真空科学与技术学报,2019,39(10):101004.3. 章淑宜. 磁场测量仪器的应用在光源插入件垫补中[J]. 物理实验,2017,37(10):64-67.。
一种用LED光源的准直系统设计
一种用LED光源的准直系统设计1 引言半导体发光二级管(LED)光源具有体积小、效率高、响应快、易调光、色域范围宽、无汞污染、使用寿命长等特点,是一种节能环保的新型光源。
随着LED技术的不断完善,特别是光效的不断提高,在投影显示、背光光源、城市照明等领域有着广泛的应用前景。
然而,由于LED的空间光强近似Lambertian型分布,使其在被照面上所形成的照度随出射角的增大而迅速衰减,很难满足远距离照明如手电、港口或码头用信号投射灯的实际需要,为了使光束平行出射以提高光能利用率,光学设计人员尝试通过各种途径来设计反射器、折射器或折反射器来改善光线在目标面的布局,以符合实际情况的需要。
目前,LED二次光学设计主要有两种方法:直接经验法和求解方程法。
直接经验法主要通过CAE三维机械建模软件绘制出光学元件的结构,并将此结构导入到光学仿真软件中如Tracepro中,并对此结构赋予某种光学属性,最后通过蒙特卡罗非序列光线追迹来判断照明面上的照度分布及整个系统的光强分布。
由于这种设计的随意性很强,相关设计者往往需要多次修改光学元件的结构,多次模拟来完成设计,此类方法并不需要太多的理论计算,设计的关键往往取决于设计者的个人经验。
方程求解法基于光源的发光特性和所需实现的照明要求而构建方程组,其未知数即为所求自由曲面上个点的坐标,在给定初始条件后,通过求解方程组的解析解或数值解,即可得到自由曲面的面型数据并可实现所需照明要求。
此种方法免去了反复试验所需的时间,提高了设计效率,但对设计人员的光学构建能力和数学功底的要求比较高。
本文针对旋转对称折射器,根据LED光源特性和目标面的光强分布要求,依据snell 定律和非成像光学中的光学扩展量要求,设计了一种较为简便的自由曲面折射器,实现了系统的长距离均匀照明。
2 设计原理建立如图1所示的坐标系。
设LED光源位于坐标系的原点,透镜前表面为平面,后表面为为曲面,即为需要设计的自由曲面。
直线加速器精密准直测量技术现状
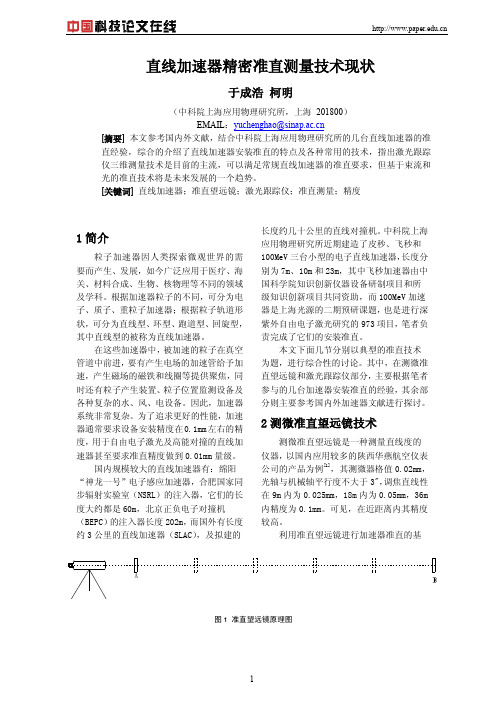
直线加速器精密准直测量技术现状于成浩柯明(中科院上海应用物理研究所,上海201800)EMAIL:yuchenghao@[摘要] 本文参考国内外文献,结合中科院上海应用物理研究所的几台直线加速器的准直经验,综合的介绍了直线加速器安装准直的特点及各种常用的技术,指出激光跟踪仪三维测量技术是目前的主流,可以满足常规直线加速器的准直要求,但基于束流和光的准直技术将是未来发展的一个趋势。
[关键词] 直线加速器;准直望远镜;激光跟踪仪;准直测量;精度1简介粒子加速器因人类探索微观世界的需要而产生、发展,如今广泛应用于医疗、海关、材料合成、生物、核物理等不同的领域及学科。
根据加速器粒子的不同,可分为电子、质子、重粒子加速器;根据粒子轨道形状,可分为直线型、环型、跑道型、回旋型,其中直线型的被称为直线加速器。
在这些加速器中,被加速的粒子在真空管道中前进,要有产生电场的加速管给予加速,产生磁场的磁铁和线圈等提供聚焦,同时还有粒子产生装置、粒子位置监测设备及各种复杂的水、风、电设备。
因此,加速器系统非常复杂。
为了追求更好的性能,加速器通常要求设备安装精度在0.1mm左右的精度,用于自由电子激光及高能对撞的直线加速器甚至要求准直精度做到0.01mm量级。
国内规模较大的直线加速器有:绵阳“神龙一号”电子感应加速器,合肥国家同步辐射实验室(NSRL)的注入器,它们的长度大约都是60m,北京正负电子对撞机(BEPC)的注入器长度202m,而国外有长度约3公里的直线加速器(SLAC),及拟建的长度约几十公里的直线对撞机。
中科院上海应用物理研究所近期建造了皮秒、飞秒和100MeV三台小型的电子直线加速器,长度分别为7m、10m和23m,其中飞秒加速器由中国科学院知识创新仪器设备研制项目和所级知识创新项目共同资助,而100MeV加速器是上海光源的二期预研课题,也是进行深紫外自由电子激光研究的973项目,笔者负责完成了它们的安装准直。
上海光源光束位置探测系统的标定

上海光源光束位置探测系统的标定
华冬;余笑寒;黎忠;徐洪杰
【期刊名称】《核技术》
【年(卷),期】2009(032)009
【摘要】介绍了上海光源(SSRF)刀片型X射线光束位置探测器(XBPM)的结构和原理,对XBPM系统标定进行了理论分析并给出了标定的实测结果,对结果进行最小二乘法拟合,求出标定比例系数.讨论了线性区间和测量精度的选取问题,在保证XBPM 系统测量精度要求10 (m的前提下,适当选取线性范围±500 μm,标定误差可达到3.3 μm,光束绝对位置定位误差约为11 μm,光束相对位置测量误差约3 μm.
【总页数】4页(P641-644)
【作者】华冬;余笑寒;黎忠;徐洪杰
【作者单位】中国科学院上海应用物理研究所,上海,201800;中国科学院上海应用物理研究所,上海,201800;中国科学院上海应用物理研究所,上海,201800;中国科学院上海应用物理研究所,上海,201800
【正文语种】中文
【中图分类】TL501;O462.3
【相关文献】
1.上海光源光束线前端区 XBPM 探测器 [J], 龚培荣;徐慧超;周剑英;何迎花;张永立;朱周侠;蒋建国
2.MATLAB神经网络分析上海光源光束线的运行数据 [J], 孙皓;龚培荣
3.上海光源光束线站同步控制技术的研究 [J], 王威;贾文红;郑丽芳;王劼
4.“上海光源”首条光束线站顺利出光 [J],
5.我国大科学装置“上海光源”首条光束线站顺利出光 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
三维准直测量技术在上海光源中的应用研究的开题报告
三维准直测量技术在上海光源中的应用研究的开题报告一、选题背景及意义随着科学技术的发展,尤其是现代物理学领域的发展,对光源的要求越来越高。
在光源中,能否精确控制光束的准直性是非常重要的问题。
准直性好的光束能够更好地用于实验中,提高实验结果的精度和可靠性。
因此,准直测量技术在光源中的应用研究具有重要的意义。
目前,常用的准直测量方法主要是利用刻度板和光屏等设备进行测量。
但是这些方法存在一些不足之处,比如说精度不能满足要求,操作复杂等问题。
因此,在上海光源中,研究并应用三维准直测量技术,可以有效地提高准直测量的精度和效率,并更好地满足科研的需要。
二、研究内容及目标本次研究的主要内容是在上海光源中研究三维准直测量技术的应用,并通过实验验证该技术在准直测量中的可靠性和精度。
具体研究目标如下:1. 研究三维准直测量技术的基本原理和测量方法。
2. 设计和建立三维准直测量系统,包括硬件和软件。
3. 通过实验验证三维准直测量技术和传统准直测量方法的差异性,并评估三维准直测量技术的准确性和可靠性。
4. 发现和解决三维准直测量技术应用过程中存在的问题和局限。
三、研究方法本研究将采用实验室控制的方法进行,主要包括以下几个步骤:1. 确定实验目标和研究内容,设计实验方案。
2. 设计和建立三维准直测量系统,包括硬件和软件。
3. 完成实验准备工作,包括器材准备,数据采集等。
4. 进行实验,对准直测量结果进行分析和验证。
5. 统计分析实验数据,总结出研究成果,并提出下一步研究计划。
四、预期成果和创新点预期成果:1. 建立三维准直测量系统,可应用于光源中的准直测量。
2. 确认三维准直测量技术在上海光源中的可靠性和精度,并与传统准直测量方法进行对比。
3. 解决三维准直测量技术在应用过程中存在的问题和局限。
创新点:1. 首次在上海光源中应用三维准直测量技术,在准直测量中具有重要意义。
2. 采用实验室控制的方法,较为全面地评估了三维准直测量技术在光源中的应用效果。
上海光源准直测量方案设计
摘
要 : 上 海 光 源 在 准 直 测 量 方 案 设 计 中面 临 的最 大 挑 战 来 自于 松 软 地 基 及 高 精 度 的定 位 要 求 。 上 海
光 源 的 准直 过 程 分 为 控 制 网 测 量 、 件 标 定 、 安 装 准 直 、 场 安 装 及 平 滑 测 量 5个 关 键 步 骤 。采 用 激 光 跟 踪 元 预 现
因此 , 加速 器物理 设计 要 求 相 邻 四极 铁 的位 置 偏 差 小 于 ±0 0 . 8 mm, 架 机 构 的 相 对 偏 差 应 小 于 ± 0 1 共 .5 mm, 储存 环安装 周长 误 差 小 于 ± 1 0mm; 长测 量 精 周 度 小于 ±1 0mmL 。表 1给 出 了储 存 环 共 架 机 构 上 . 2 ] 元 件 的相 对定 位公差 , 以看 出 , 件定 位精 度均 在亚 可 元 mm 量 级 。在 大至 几百 m 的尺 寸空 间 中, 实 现 如此 要 高 的精 度 , 疑对准 直测 量技 术 提 出了 巨大的挑 战 。 无
1 1 准 直 公 差 .
根据机 械 总体计 划 , 安装 准直 可分 为 5 关键 步 骤 , 图 1所示 。控 制 网能给安 装提 供全 局及 局部 性 的控 个 如
制, 确保在 统一 的坐 标系 中进 行安 装 ; 件标 定可 得 到基准 点
*
收 稿 日期 : 0 5 1 - 8 2 0 -20 ;
修 订 日期 : 0 60 —8 2 0—42
基 金 项 目 : 家 重大 科 学 工 程 上海 光 源项 目资助 课 题 国 作 者 简 介 : 成 浩 (9 7 )男 , 南 新 野 人 , 职博 士 生 , 程 师 , 于 17 一 , 河 在 工 目前 承 担 上 海 光 源 准 直 测 量 系 统 的 设 计 和 实 施 任 务 ; hn h o s y eg @
4.4 准直测量
1、尼龙丝准直系统
系统包括三个部分:尼龙丝、带有探测器的尺子及控制 装置。 步骤:1、在两个基准点之间拉紧尼龙丝形成一条基准线; 2、把带有探测器的尺子建立一条过基准点中心且垂 直于尼龙丝的垂线。 探测装置由逻辑线路、滤波器、前置放大器、功率放 大器以及伺服回路等组成,探测器在精密螺丝杆上移动的距离 (即偏距)可由计算起显示出来。
D ∆x = λ d
二、波带板激光准直测量 激光束经菲涅耳波带板后能干涉成像,且光点、波带板 中心和像点在一直线上。应用这个性质进行准直测量,称为 激光波带板准直测量。 组成:激光器 波带板 激光探测器
测量方法: (1)在一个基准点A安置激光器 (2)在另一基准点B安置探测器 (3)在待测点i安置一特定焦距的波带板。当激光照满波带 板时,在B点激光探测器上可测得 ∆ ,从而可计算出i点的偏 i 距。
在大型建筑施工中,经常有大面积饰面板安装工程,如,大理石贴 面、地板安装等。在这种情况下,利用激光束做基础,可以提高精度。 毛主席纪念堂柱廊有44根柱子,每边12跟,用大块的经过刨床 加工过的花岗石作饰面,为了使12跟廊外饰面共在一个铅垂面上,采用 了激光准直仪为最下面的两列石板准直。在施工中,先使仪器发出的激 光束与柱列中心线平行,再以激光束作为检查每根柱上花岗石板共铅垂 面的基准,可保证各石板共铅垂面,精度可达到毫米量级。
例子:在开凿地下隧道工程中,过去用普通光学经纬仪等仪器,在 人工照明的条件下,设立标桩,建立基准线。这种方法一方面需要不断 停工,影像掘进速度;另一方面在照明不足、粉尘浓度大的情况下,测 程短,需要测得次数多,质量也不容易得到保证、而在地铁、隧道工程 中,应用激光准直测量,激光束可达300m远,并且亮度大,看的清楚, 也便于用光电检测自动控制调整掘进方向。
上海光源准直测量方案设计
上海光源准直测量方案设计
于成浩;殷立新;杜涵文;赵振堂;黄开席
【期刊名称】《强激光与粒子束》
【年(卷),期】2006(18)7
【摘要】上海光源在准直测量方案设计中面临的最大挑战来自于松软地基及高精度的定位要求.上海光源的准直过程分为控制网测量、元件标定、预安装准直、现场安装及平滑测量5个关键步骤.采用激光跟踪仪和静力水准系统等测量手段,将控制网精度设计为0.08 mm,其余步骤精度达到0.05 mm,以保证相邻共架机构的准直精度达到0.12 mm,优于0.15 mm的设计指标.方案在注重精度指标的同时,还兼顾了可靠性、测量效率、费用及实时监测的可能性.
【总页数】6页(P1167-1172)
【作者】于成浩;殷立新;杜涵文;赵振堂;黄开席
【作者单位】中国科学院,应用物理研究所,上海,201800;中国科学院,应用物理研究所,上海,201800;中国科学院,应用物理研究所,上海,201800;中国科学院,应用物理研究所,上海,201800;中国科学院,高能物理研究所,北京,100049
【正文语种】中文
【中图分类】TL505
【相关文献】
1.异形结构建筑的精密工程测量——上海光源工程精密三维控制测量 [J], 费跃忠;刘廷明
2.BEPCⅡ预安装准直测量方案设计 [J], 王国峰;屈化民;戴旭文
3.3维准直测量技术在上海光源中的应用研究 [J], 于成浩
4.宽激光束的准直及其准直度的测量方法 [J], 赵建林;李育林
5.超导直线加速器准直方案设计 [J], 袁建东;马力祯;何源;张斌;孙国珍
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第18卷第7期强激光与粒子束V o l.18,N o.7 2006年7月H I G H P OW E R L A S E R A N D P A R T I C L E B E AM S J u l.,2006文章编号:1001-4322(2006)07-1167-06上海光源准直测量方案设计*于成浩1,殷立新1,杜涵文1,赵振堂1,黄开席2(1.中国科学院应用物理研究所,上海201800;2.中国科学院高能物理研究所,北京100049)摘要:上海光源在准直测量方案设计中面临的最大挑战来自于松软地基及高精度的定位要求。
上海光源的准直过程分为控制网测量、元件标定、预安装准直、现场安装及平滑测量5个关键步骤。
采用激光跟踪仪和静力水准系统等测量手段,将控制网精度设计为0.08m m,其余步骤精度达到0.05m m,以保证相邻共架机构的准直精度达到0.12m m,优于0.15m m的设计指标。
方案在注重精度指标的同时,还兼顾了可靠性、测量效率、费用及实时监测的可能性。
关键词:上海光源;准直测量;控制网;预准直;平滑测量;测量精度中图分类号:T L505文献标识码:A上海光源(上海同步辐射装置,简称为S S R F)由长度20m的直线加速器、周长分别为180m的增强器、432m的储存环及多条光束线站组成,S S R F是一个非常复杂的系统,包括磁铁、真空室、束测元件、高频腔、光学镜、支架、辐射防护等设备。
这些设备除了应满足加速器所要求的物理特性外,还必须有很高的相对及绝对定位精度[1]。
以四极铁为例,其垂直于束流轨道方向的位置公差会引起磁聚焦性能受损,导致束流发散度增大;而绕束流轨道平面的旋转公差会引起束流纵向运动与横向运动的耦合,从而增加束流的不稳定性,缩短束流寿命。
因此,加速器物理设计要求相邻四极铁的位置偏差小于±0.08m m,共架机构的相对偏差应小于±0.15 m m,储存环安装周长误差小于±10m m;周长测量精度小于±1.0m m[2]。
表1给出了储存环共架机构上元件的相对定位公差,可以看出,元件定位精度均在亚m m量级。
在大至几百m的尺寸空间中,要实现如此高的精度,无疑对准直测量技术提出了巨大的挑战。
表1储存环支架内磁铁相对位置公差T a b l e1S t o r a g e r i n g m a g n e t t o l e r a n c e i n g i r d e rq u a d r u p l e s e x t u p o l e c o r r e c t o r ΔX/m m0.080.080.2ΔY/m m0.080.080.2ΔZ/m m0.30.30.3ΔθX/m r a d0.20.30.5ΔθY/m r a d0.20.30.5ΔθZ/m r a d0.20.20.21设计思想加速器准直测量设计,主要根据精密工程测量理论[3],借鉴国内外加速器准直测量技术的应用情况,采用先进的测量仪器和优化方案。
方案设计过程中,主要考虑以下几个因素:(1)最终限差和步骤限差,设计应该保证最终定位误差满足物理要求,由于装置的复杂性,安装过程被分成了若干个步骤,每个步骤的误差源都应该详细分析,并设定限值;(2)多种仪器的合理使用,应充分发挥所选用仪器的优点,限制其缺点,保证精度和使用方便性;(3)方案的可持续性,方案不仅要保证安装的顺利进行,还应能够在运行期间进行定期或实时复测、调整。
1.1准直公差根据机械总体计划,安装准直可分为5个关键步骤,如图1所示。
控制网能给安装提供全局及局部性的控制,确保在统一的坐标系中进行安装;元件标定可得到基准点和元件中心的相对位置关系;经过预安装准直,将确保四极铁、六极铁等共架元件的相对位置,减少在隧道内的安装时间;平滑测量是为了保证束流轨道的平滑过渡,对于加速器来说具有特别重要的意义。
根据加速器准直测量的经验及所做的各种相关试验,每一步的预期精度见图1。
由误差传播定律可知,在*收稿日期:2005-12-08;修订日期:2006-04-28基金项目:国家重大科学工程上海光源项目资助课题作者简介:于成浩(1977-),男,河南新野人,在职博士生,工程师,目前承担上海光源准直测量系统的设计和实施任务;y u c h e n g h a o@s i-n a p.a c.c n。
平滑测量前,元件精度可以估算为(0.08m m )2+(0.05m m )2+(0.05m m )2+(0.05m m )ヘ2=0.12m m 。
F i g .1 A l i g n m e n t s t e p s a n da c c u r a c y图1 准直步骤及精度经过平滑测量,元件的相对精度可能进一步提高。
储存环的安装及测量误差主要取决于测距仪器,由于主要的测量工具为激光跟踪仪,它利用干涉原理测距,可保证所需的精度;而元件的旋转公差主要是通过电子倾斜仪控制的。
1.2 准直仪器激光跟踪仪是一个快速的3维测量仪器,它利用激光干涉原理测量斜距,保证了高精度,利用位置敏感探测器(P S D )测量激光束的位置变化量,并反馈给伺服电机以控制跟踪头随之转动,从而实现跟踪测量,简化了测量过程,极大地提高了效率。
利用配套的具有数据采集、图形显示、分析报表等功能的软件,可以非常方便地进行测量、点位放样、变形监测等。
在上海光源的建造中,该仪器将用于所有的安装准直步骤,这样将消除传统测量中因设备不同造成的误差,数据获取、处理和管理也将变得非常方便。
在繁忙时段,将有3~4台激光跟踪仪同时使用,以提高效率,保证工期。
此外,所用的测量仪器还有以下几种:(1)电子倾斜仪N i v e l 20[4],具有0.001m m /m 的测量分辨率,用于测量磁铁的倾斜;(2)水准仪N 3和N A 3003,往返中误差分别为0.2m m /k m 和0.4m m /k m ,用于粗就位及地面的变形监测;(3)全站仪T D M 5005,测角精度为0.5",测距精度为0.2m m±0.001m m /m ,主要用于整体控制网测量;(4)投点仪N L ,标称精度为1:200000,用于精确对中。
对于精密测量工作来说,正确的操作和外部条件的严格控制是充分发挥仪器性能的重要条件。
因此,仪器的使用将被严格规范化,在实际工作纳入质量管理。
测量环境也将被严格控制,并保证所用测量工装夹具的质量。
1.3 方案的可持续性从工程设计的最初阶段起,准直测量就一直作为一个独立系统存在,它和其它系统协调,确保相关系统之间不发生干涉,从而保证准直测量方案的完整性、可持续性。
在上海光源运行后,准直复测、调整可重新进行。
2 具体方案2.1 控制网控制网分为整体控制网和局部控制网。
整体控制网有两个目的:一是保证加速器各部分和实验大厅各元F i g .2 S S R F l a y o u t a n d g l o b a l c o n t r o l n e t w o r k 图2 上海光源布局及整体控制网分布情况件之间相对关系正确,二是限制局部控制网的误差积累。
各局部控制网的目的是保证各个加速器及光束线站自身相对位置关系的正确。
整体控制网按平面和高程分别进行观测,局部控制网采用3维测量方法观测。
2.1.1 整体控制网整体控制网由19个网点组成,其中直线加速器和增强器上各2个,储存环上9个,实验大厅6个,如图2所示。
在建筑设计时预留了专门的测量视线通道,确保通视性。
平面方向采用边角同测的方式,根据优化设计结果,确定观测量。
由于测量通视孔会引起辐射泄漏问题,为减少穿墙孔数量,决定从将地面点铅垂引出到7.4m 的标高。
在铅垂方向上,地面点正上方相对应的隧道顶板预留Ф200m m 通视孔,以确保控制点能从隧道地面投影到仪器中心。
观测平台和仪器支架相互分离,以避免对测量精度造成影响,见图3。
水平方向上,选取的点位应保证能避免结构8611强激光与粒子束第18卷柱、隧道墙、大厅墙体等对视线的遮挡,在视线通过墙体处要设可开启的窗。
对于增强器隧道来说,在隧道顶部还有2.2m 高的管线层,上面预留Ф400m m 的通视孔,相应的仪器支架高度会缩短。
根据自由网平差原理[5],利用清华山维平差软件“N A S EW 95”对地面网进行了点位相对和绝对误差估算。
设测距精度M s =0.5m m ,测角精度φa =3",利用优化的边角观测量进行计算,绝对点位精度和相对点位误差绝对值均小于0.5m m 。
考虑到角度测量的低效率,我们拟增加距离测量值,对向观测,适当减少角度观测量。
进行高程观测时,采用水准测量进行往返多闭合环观测方式,把部分局部网隧道地面控制网点融合进控制网中,以监测隧道地面的不均匀沉降。
F i g .3 S u r v e y sk e t c ho f g l o b a l n e t w o r k 图3 整体网平面观测示意图F i g.4 T u n n e l n e t w o r k 图4 局部控制网2.1.2 局部控制网根据上海光源工艺的布局情况,局部控制网分成直线加速器网、增强器网、储存环网和实验大厅网,共有700多个控制网点,空间分布在隧道内墙、外墙、顶部及地面,采用3维方法测量。
储存环网点分布及利用激光跟踪仪测量见图4,每组点间距约为6m 。
测量时,把激光跟踪仪建立在第一站,测量与该仪器距离小于12m 的所有点。
然后移动仪器,建立新站,站间距约6m 。
在新站观测前后12m 的所有点,这样两站之间有很多重复测量的点,激光跟踪仪的配套软件利用这些点进行光束法平差,所有控制点都可得到第一站坐标系下的坐标。
逐渐向前推进,直到回到第一站,完成整个环的测量,最后得到所有控制点在统一的坐标系的3维坐标。
这种完全3维的测量方法避免了多种测量仪器的使用,无需繁琐的投点和瞄准,能立即获得3维坐标,测量及平差所需的时间缩短至几分之一,效率大大提高。
由于相邻测站有很多重复观测,测量可靠性也将得到有效保证。
这将有利于减少准直所需的时间,提高安装准直效率并避免因安装准直影响机器未来的运行时间。
由于储存环高精度的要求,除了采用激光跟踪仪进行3维测量外,还将利用全站仪进行3维测量,以弥补激光跟踪仪角度测量的误差。
全站仪测量也无需投点,瞄准内外墙壁上的点,每站可观测更远距离,相邻站间隔约20m ,无需重叠,效率非常高。
2.1.3 控制点结构及埋设控制网点采用强制对中原理,设计为圆锥面结构,并和直径Ф38.1m m 的反射球配合,反射球是活动的,锥面结构在空间固定,见图5。
球和锥面的切线是一个圆,但由于机械加工误差,球面和锥面都不是严格规则的,实际相互接触的只有3个点。