双电机驱动汽车差速控制解析
电动汽车双轮驱动差速控制

电动汽车双轮驱动差速控制摘要电动汽车优于传统内燃机汽车并不仅仅在于能源的更替,性能上更具提高的空间,多电机驱动是电动汽车获得更好性能的有效途径之一。
该文是以无刷双馈电机牵引的双轮驱动电动汽车为研究对象,对双轮无刷双馈电机牵引控制进行了较为透彻的研究和分析。
该论文主要研究的方向如下:首先,对无刷双馈电机控制性能进行了深入的分析和仿真研究,针对电动汽车的驱动要求的优势,首次提出以无刷双馈电机作为双轮驱动电动汽车的牵引动力,并针对无刷双馈电机驱动系统存在的亚同步区控制绕组能量回流问题。
仿真结果表明:无刷双馈驱动具有动态响应快、起动、制动、加速、减速各工况下能量分配灵活、高速运行能力强的优点,另外一个更显著的有点是当逆变器不可使用时,电机可当做感应电机。
其次,依照双馈电机结构、控制的特殊性,提出一种结构简单的双轮驱动电动汽车无刷双馈电机级联差速控制结构,该结构成本低,更充分的发挥了双馈输入的优势。
关键词:电动汽车;双轮驱动;无刷双馈电机;差速控制AbstractElectric vehicle (EV) is superior to the traditional internal combustion engine vehicle, not only in energy replacement, but also in the more space of performance improvement, multi-motor drive is an effective way to get better performance for electric vehicle. The EV which is drived by double BDFM(Brushless Double Feed Motor) is taken as an object in this dissertation, which analyses and studies traction control.Mainly research works of the dissertation are as follows.First of all, the performance control of the DTC system of the BDFM are analysed and simulated in the dissertation, BDFM is first purposed to be the drive source for EV with the advantage.To solve the problem of the control winding current feedback in the sub-synchronous area of the BDFM control system. The simulation shows, the advantage of brushless doubly-fed driver is fast dynamic response, flexible energy distribution under the condition of starting, braking, accelerating, decelerating, excellent ability of high speed operation. When one set of inverter breakdown, BDFM also can run as an induction motor, for the EV run in field works.Second, according to the specific characteristic of BDFM’s structure, control and energy transfer, a BDFM differential cascade system in two-wheel drive EV is proposed in the dissertation, which costs low, takes more advantage of double-fed input and energy natural distributing in steering and efficiently.Keywords:Electric Vehicle;Two-wheel Drive;Brushless Doubly-fed Machine;Differential Control目录摘要 (I)Abstract ............................................................................................................................... I I 1绪论................................................................................................................................ I II1.1课题背景及选题意义 (1)1.2电动汽车的发展概况 (1)1.2.1国外发展现状 (1)1.2.2国内发展现状 (2)1.3多电机驱动电动汽车控制技术 (3)1.4 主要研究工作 (3)2 无刷双馈电机运行的基本原理 (5)3无刷双馈电机牵引控制策略 (8)3.1无刷双馈电机直接转矩控制 (8)3.2基于控制绕组电流最小化直接转矩控制策略 (9)3.3牵引系统仿真 (12)4无刷双馈电机双轮差速控制原理与结构 (17)4.1双轮驱动电动汽车的转向模型 (17)4.2双馈级联差速结构 (19)4.3双馈独立驱动差速结构 (20)5双轮驱动无刷双馈差速系统仿真分析 (21)5.1双轮驱动双馈级联差速系统仿真 (21)5.2双轮无刷双馈电机独立驱动差速系统仿真 (24)结论 (27)致谢 (29)参考文献 (30)1绪论1.1课题背景及选题意义电动汽车,如清洁能源,节能,低噪音和能源多样化,是公认的解决未来能源问题和环境问题的最有效的工具之一,在世界上,各国政府,企业和科研机构的所有国家的关注。
双电机独立驱动电动车电子差速技术

关键词 : 双电机驱动 ; 电子差速 ; 自适应差速 ; 相对滑转率 El c r c Di e e ta c no o y o e t i hil s e t i f r n i lTe h l g fEl c r c Ve c e b nd pe e t. r v n Du lM o o s y I e nd n .d i e a t r
Ab ta t lcrncdf rnil f )s s m o o be moo n iiu l d v lcr e il sdsu sd i h a e . sr c :E e t i iee t ED y t frad u l — tridvd a— r eeeti v hcei ic se n te p p r o f a e i c
tep p rp t fr adtese d rg lt gmeh d wt h eaiesi ai ( )o a hd vn h e scnrl a a l n h a e us ow r p e euai to i terlt l rt h n h v p o 6 f c r igw e l o t r bea d e i a ovi
h sb t rd v n e fr a c . a et r ig p ro e i m n e
Ke r s Du lmo o r vn ; e t o i i e e t l ywo d : a t r d i i g El c r n c d f r n i ;Ad p i e d fe e t l a a tv i r n i ;Rea i esi a i a lt l r t v p o
时, 采用 自适应调节的电子差速模式 , 实现电子差速 功能 ; 占 2 在 > %时 , 采用 闭环有差反馈 式调 压 系统调 节 , 占 %, 使 ≤2 实现
基于智能车的后轮双电机差速的研究与应用
基于智能车的后轮双电机差速的研究与应用刘刚【摘要】针对飞思卡尔智能车竞赛的C型车模,前轮舵机转向,后轮双电机差速,用电控方式对此车模后轮的双电机进行差速控制,满足Ackermann转向原理,在原差速转向基础上进行了改进,并提出了一种阿克曼式差速PID公式,也给出一套对差速参数的整定方案,使双电机差速应用简单化,让电动智能汽车转向性能得到较大的提高.【期刊名称】《电子制作》【年(卷),期】2015(000)013【总页数】2页(P88-89)【关键词】双电机驱动;智能车;阿克曼式差速PID;电子差速【作者】刘刚【作者单位】安徽工业大学电气与信息工程学院【正文语种】中文在车速极低,且不考虑汽车质心侧偏、横摆角,以及路面情况变化和侧风等情况下,可以参考阿克曼(Ackerman)转向几何学原理,如图1。
可以看到汽车在转弯时,内、外侧后轮行驶距离不同,而两者行驶时间却相同,因此两者时间存在差速问题。
图1 阿克曼转向几何图2 MOS管驱动电路传统汽车使用机械差速器来完成差速,机械差速器的基本运动规律是:无论转弯或直行,两侧驱动车轮的转速之和始终等于差速器壳转速的2倍。
常用的对称式锥齿轮差速器,其内摩擦力矩很小,实际上可以认为无论左右驱动轮转速是否相等,两边扭矩总是平均分配,这样的分配比例对于车辆在良好路面上直行或转弯时,其运行状态都是满意的,但并不可人为自由调节达到最佳状态。
最近几年,世界各地都在研究电动汽车,而在电动汽车中,由于使用两台电机直接驱动后轮,不用安装机械差速器,但是在转弯时面临着差速问题。
因此如何解决电动汽车转弯时的差速问题,成为电动汽车发展的关键问题。
本文以智能车比赛C车模为基础,搭建双电机驱动,用kinetic系列单片机控制,让电子差速在理论与实践中的应用恰到好处。
1 双电机驱动电路的设计差速需要在低速与高速的不同行驶环境下才能看到效果,因此为了满足车速要求,所选驱动必须能承受大电流用以驱动不同的车速变化和正反转变化。
基于主从策略的双轮直驱电动汽车转向差速控制

结构更加灵活,成为电动汽车发展的新方向。 轮毂电机驱动的电动汽车是一种由电机直接驱动
的汽车,每个电机单独提供驱动力矩,电机之间没有机 械联系。如何有效地控制两个电机,完成驾驶员期望的 转向,是轮毂电机直驱式电动汽车研究的重点之一。目 前研究较 多的方 案有两 种:(1 )线控转 向技术[ 4] ,此方 法 需 要 多 个 转 向 传 感 器 参 与 工 作 ,实 时 检 测 转 向 盘 与 转向电机的转矩或转角的大小和方向[5],并将此信息转 换 为 电 信 号 由 电 子 控 制 器 处 理 ,但 是 传 感 器 的 精 度 和 稳定性是其最主要的瓶颈;(2 )电子差速(E l e c t r o n i c Differential,ED)控制,此方法的实质是根据汽车在不同 的 操 纵 方 式 和 外 部 环 境 下 为 驱 动 轮 提 供 转 速 给 定 ,进 而 控 制 驱 动 轮 输 出 不 同 的 转 矩 ,实 现 机 械 差 速 器 的 功
Key words: electric vehicle; in-wheel motor; electronic differential; direct torque control
0 引言
随着电力电子技术、轮毂电机技术的不断发展,直 驱式电动汽车已经成为了研究热点。与传统汽车相比, 首先,直驱电动汽车无需传统汽车变速器、传动轴等机 械 部 件 ,直 接 将 电 机 安 装 在 车 轮 中 ,节 省 了 大 量 的 空 间,减轻了车重并提高了能量的利用效率;其次,电机 动态响应快且精确[1- 3]。采用轮毂电机单独驱动,设计
同步控制策略是基于一个虚拟的通用主控制器实
现的,它将 Ackerman 算式计算得来的转速作为两个驱 动电机的转速给定(图 3)。现将异步电机简化为一阶惯
双电机驱动汽车差速控制解析
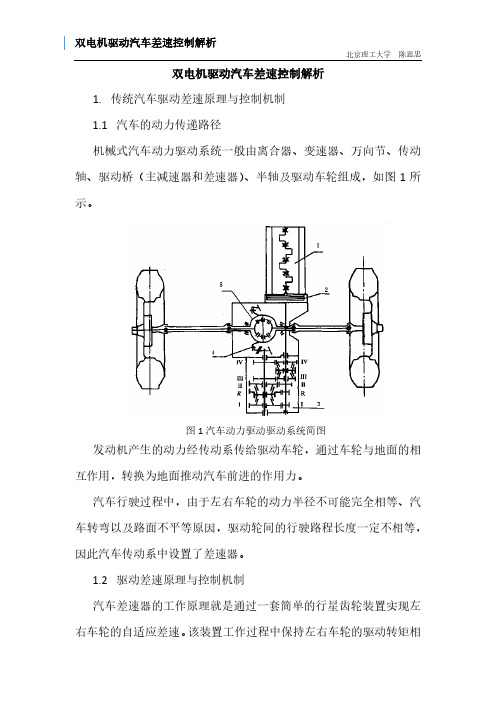
双电机驱动汽车差速控制解析1.传统汽车驱动差速原理与控制机制1.1汽车的动力传递路径机械式汽车动力驱动系统一般由离合器、变速器、万向节、传动轴、驱动桥(主减速器和差速器)、半轴及驱动车轮组成,如图1所示。
图1汽车动力驱动驱动系统简图发动机产生的动力经传动系传给驱动车轮,通过车轮与地面的相互作用,转换为地面推动汽车前进的作用力。
汽车行驶过程中,由于左右车轮的动力半径不可能完全相等、汽车转弯以及路面不平等原因,驱动轮间的行驶路程长度一定不相等,因此汽车传动系中设置了差速器。
1.2驱动差速原理与控制机制汽车差速器的工作原理就是通过一套简单的行星齿轮装置实现左右车轮的自适应差速。
该装置工作过程中保持左右车轮的驱动转矩相等,但某一车轮阻力减小时,容许其转速增加;反之当车轮阻力增加时,容许车轮转速减低。
事实上,汽车行驶过程中,驱动车轮不是独立存在的,一方面车轮作为汽车的一分子,需随汽车一起运动,同时车轮运动也受地面的约束,在附着作用范围内,车轮转速的变化受到地面附着的约束。
因此汽车差速器的工作原理,可以这样解析:差速装置给左右车轮相等的驱动转矩,即等转矩控制;车轮转速由路面约束,即在路面约束条件下,车轮自动调节转速,以实现阻力最小。
2.双电机驱动汽车的差速控制原理2.1双电机驱动汽车的动力传递路径对于双电机驱动的汽车,动力源可能是动力电池组或发电机+电池,但驱动系统基本上如图2所示。
图2 双电机驱动系统简图这类电驱动汽车,由于电机控制策略的不同,都要面临左右车轮因行驶路程不同而需要进行差速控制问题。
2.2驱动电机及其控制策略目前,电动汽车广泛应用的驱动电机主要有异步电动机、无刷直流电动机和永磁同步电动机(PMSM)三种。
异步电动机具有结构简单、可靠性高,控制技术相对成熟等优点。
异步电动机的控制方法主要有恒压频比控制、矢量控制和直接转矩控制等。
恒压频比控制的优点是控制方法简单,转速的改变可以通过控制电源频率实现;其缺点是动态性能不好,在突加负载或转速给定突变时容易发生失步现象。
智能车模双电机差速控制的可行性研究

智能车模双电机差速控制的可行性研究
双电机独立驱动电动车的系统结构
双电机独立驱动电动车系统结构,如图1所示。
该电动车采用7.2V镍镉电池给电机供电,2台直流无刷电机分别直接安装在2个后车轮内,形成前轮转向、后轮驱动的方式。
每台电机都有单独的控制器和测速系统,能够实时检测左右电机速度,整车控制器通过接收舵机转角、摄像头路况信息、电池、电机驱动控制器及车轮转速等信号,并根据内部控制策略,以高速平稳过弯为目标,通过控制器改变控制信号的PWM电压输出值,以此来控制2台电机的电压值,调节2台电机的转速,从而控制驱动车轮的转速。
系统同时采用无线模块与上位机相结合的方式实时检测速度曲线,优化系统参数,以致达到更平滑的过弯效果。
基于转速调节的差速方案
方案介绍
要解决差速问题,最直观的就是控制两个驱动轮的转速,使其满足Ackerman模型的要求。
以图2所示的两轴车为例,阿克曼理论转向特性,是以汽车前轮定位角都等于零、行走系统为刚性、汽车行驶过程中无侧向力为假设条件的。
该转向特性的特点为:①汽车直线行驶时,4个车轮的轴线都互相平行,而且垂直于汽车纵向中心面;②汽车在转向行驶过程中,全部车轮都必须绕一个瞬时中心点做圆周滚动,而且前内轮与前外轮的转角应满足下面关系式: ctgβ-ctgα=K/L 式中:β为汽车前外轮转角,α汽车前内轮转角,K为两主销中心距,L为轴距。
但是,该模型在理想条件下可行,而在实际系统中是不可能满足上述条。
双轴双电机驱动电动汽车整车控制器开发

双轴双电机驱动电动汽车整车控制器开发随着环保意识不断提升和技术发展的推动,电动汽车已经成为了汽车产业的一个重要方向。
双轴双电机驱动系统是电动汽车的核心部件之一,其控制器的开发对于电动汽车整车性能的提升具有至关重要的意义。
本文将围绕双轴双电机驱动电动汽车整车控制器的开发展开讨论,深入探讨控制器的核心技术和关键问题,并探讨未来的发展方向。
双轴双电机驱动系统是电动汽车的重要驱动形式之一。
相较于传统的单轴单电机驱动系统,双轴双电机可以实现更高效的动力输出和更灵活的控制性能。
在这种系统中,每个轮子都有一个独立的电机,可以实现对每个轮子的独立控制,从而实现差速、转向和动力分配等功能。
这种设计可以有效提升电动汽车的性能,并且在一定程度上提升了电动汽车的安全性和稳定性。
双轴双电机驱动系统的控制器是整个系统的核心部件,其主要功能是实现对电机的精准控制和协调控制。
控制器需要对电机进行转速和扭矩的闭环控制,保证电机在各种工况下都能够提供稳定的动力输出。
控制器需要实现电机之间的协调控制,确保电机之间的动力输出达到最佳的分配方式,从而提升整车的性能和能效。
控制器还需要实现对车辆动力系统、制动系统和转向系统的集成控制,实现整车的动态平衡和稳定性。
双轴双电机驱动系统的控制器开发面临着一系列的技术挑战。
电机的高效控制是整个系统的基础,同时也是最为困难的问题之一。
传统的PID控制器往往难以满足电机动态响应和精准控制的需求,因此需要采用更为先进的控制算法和技术,如模型预测控制、自适应控制等。
电机之间的协调控制也是一个复杂的问题,需要综合考虑车辆的动力需求、路况以及车辆的稳定性等因素,实现最佳的动力分配。
控制器的智能化和互联化也是未来的发展方向之一,通过车联网技术实现车辆与环境的实时交互,进一步提升整车的性能和安全性。
针对这些技术挑战,我们需要采用一系列的创新技术和工程手段来解决。
需要借助先进的电机设计和制造技术,实现电机的高效化和精密化,从根本上解决电机控制的难题。
新能源四驱双电机工作原理
新能源四驱双电机的工作原理涉及到多个方面,包括能量转化、动力传递、控制等方面。
以下是详细的工作原理:
能量转化:
双电机在新能源四驱系统中扮演着重要的角色。
首先,双电机通过将电池储存的电能转化为机械能,进而驱动车辆行驶。
在这个过程中,电机起到将电能转化为机械能的关键作用。
动力传递:
双电机通过传动装置将机械能传递给车轮,从而推动车辆行驶。
在动力传递的过程中,差速器起到了解决车轮差速问题的作用,能够使车辆在转弯时左右两侧的车轮能够独立自由地旋转。
半轴则是将动力从差速器传递到车轮上的关键部件。
控制方面:
控制系统通过传感器获取车辆的运行状态和环境信息,通过电控单元对电机的工作进行调节和控制。
控制系统能够根据车辆的实际需求,实时调整电机的输出功率和转速,从而实现对车辆的精确控制。
同时,控制系统还能够监测电池的电量和温度等参数,保证车辆的安全运行。
结构方面:
新能源四驱双电机系统的结构比较复杂,主要包括单电机+传动轴、双电机全轮驱动、发动机+电机组合等结构。
这些结构通过不同的方式实现动力四轮驱动,以满足不同行驶状态的需求。
综上所述,新能源四驱双电机的工作原理涉及到能量转化、动力传递、控制和结构等方面。
双电机在系统中扮演着重要的角色,通过将电能转化为机械能、传递给车轮,并由控制系统进行精确控制,从而实现车辆的安全、稳定行驶。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
双电机驱动汽车差速控制解析
1.传统汽车驱动差速原理与控制机制
1.1汽车的动力传递路径
机械式汽车动力驱动系统一般由离合器、变速器、万向节、传动轴、驱动桥(主减速器和差速器)、半轴及驱动车轮组成,如图1所示。
图1汽车动力驱动驱动系统简图
发动机产生的动力经传动系传给驱动车轮,通过车轮与地面的相互作用,转换为地面推动汽车前进的作用力。
汽车行驶过程中,由于左右车轮的动力半径不可能完全相等、汽车转弯以及路面不平等原因,驱动轮间的行驶路程长度一定不相等,因此汽车传动系中设置了差速器。
1.2驱动差速原理与控制机制
汽车差速器的工作原理就是通过一套简单的行星齿轮装置实现左右车轮的自适应差速。
该装置工作过程中保持左右车轮的驱动转矩相
等,但某一车轮阻力减小时,容许其转速增加;反之当车轮阻力增加时,容许车轮转速减低。
事实上,汽车行驶过程中,驱动车轮不是独立存在的,一方面车轮作为汽车的一分子,需随汽车一起运动,同时车轮运动也受地面的约束,在附着作用范围内,车轮转速的变化受到地面附着的约束。
因此汽车差速器的工作原理,可以这样解析:差速装置给左右车轮相等的驱动转矩,即等转矩控制;车轮转速由路面约束,即在路面约束条件下,车轮自动调节转速,以实现阻力最小。
2.双电机驱动汽车的差速控制原理
2.1双电机驱动汽车的动力传递路径
对于双电机驱动的汽车,动力源可能是动力电池组或发电机+电池,但驱动系统基本上如图2所示。
图2 双电机驱动系统简图
这类电驱动汽车,由于电机控制策略的不同,都要面临左右车轮因行驶路程不同而需要进行差速控制问题。
2.2驱动电机及其控制策略
目前,电动汽车广泛应用的驱动电机主要有异步电动机、无刷直流电动机和永磁同步电动机(PMSM)三种。
异步电动机具有结构简单、可靠性高,控制技术相对成熟等优点。
异步电动机的控制方法主要有恒压频比控制、矢量控制和直接转矩控制等。
恒压频比控制的优点是控制方法简单,转速的改变可以通过控制电源频率实现;其缺点是动态性能不好,在突加负载或转速给定突变时容易发生失步现象。
矢量控制的调速范围宽,可以对转矩实行精确控制,从零速起对转速进行控制。
直接转矩控制的控制方法比矢量控制简单,系统动态响应速度快;但控制精度不如矢量控制高。
无刷直流电动机系统的优点是功率密度大,控制方法简单,效率高。
控制方法主要有:电压控制策略,即通常所称的调压调速特性;转矩闭环控制策略,转矩控制策略包括直接输入转矩(电流)指令的电流滞环控制,采用积分作用(如PI规律)的调节系数的电流控制,以及基于转矩控制的空间电压矢量控制;转速闭环控制策略,转速控制策略是对电机转速输入指令与转速反馈信号的差值△V,进行PI或PID 规律调节的闭环控制。
永磁同步电动机具有控制精度高、转矩密度高、噪声低等优点。
由于转子无导条,无铜耗,所以转子惯量可以做得很小。
永磁同步电动机的控制策略有三种,即恒转矩控制、普通弱磁控制和最大输入功率弱磁控制。
3.双电机驱动汽车的差速控制原理选择
对于双电机驱动或多电机驱动的汽车,电机控制策略的选择至关
重要,目前电驱动汽车领域采用各种控制策略的都有,也有多种策略的组合,也有各种创新性控制策略。
根据本文第一部分汽车行驶驱动与差速控制原理分析,建议无论采用那种驱动电机,都采用左右驱动车轮相等转矩控制策略,转矩的大小由驾驶员控制。
而对于四驱汽车,前后车轮的驱动转矩比建议考虑前后轴荷比以及加速工况的轴荷转移进行控制。