电机选型计算公式
电机选型公式集合
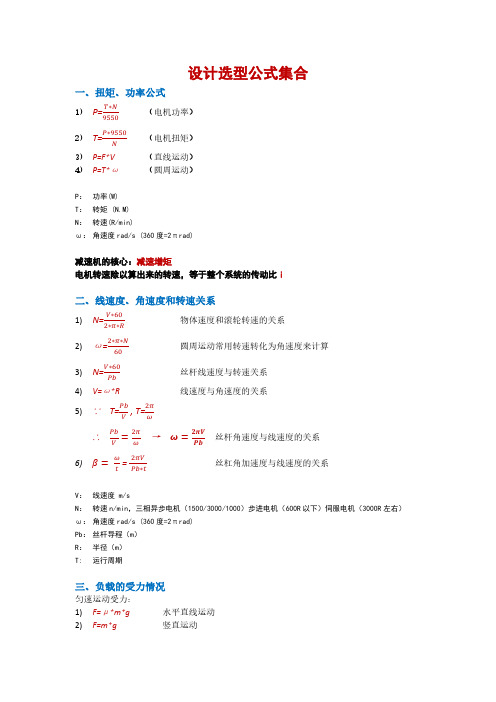
设计选型公式集合一、扭矩、功率公式1)P=T∗N9550(电机功率)2)T=P∗9550N(电机扭矩)3)P=F*V (直线运动)4)P=T*ω(圆周运动)P:功率(W)T:转矩 (N.M)N:转速(R/min)ω:角速度rad/s (360度=2πrad)减速机的核心:减速增矩电机转速除以算出来的转速,等于整个系统的传动比i二、线速度、角速度和转速关系1)N=V∗602∗π∗R物体速度和滚轮转速的关系2)ω=2∗π∗N60圆周运动常用转速转化为角速度来计算3)N=V∗60Pb丝杆线速度与转速关系4)V=ω*R 线速度与角速度的关系5)∵T=PbV , T=2πω∴PbV =2πω→ω=2πVPb丝杆角速度与线速度的关系6)β=ωt =2πVPb∗t丝杠角加速度与线速度的关系V:线速度 m/sN:转速n/min,三相异步电机(1500/3000/1000)步进电机(600R以下)伺服电机(3000R左右)ω:角速度rad/s (360度=2πrad)Pb:丝杆导程(m)R:半径(m)T: 运行周期三、负载的受力情况匀速运动受力:1)F=μ*m*g水平直线运动2)F=m*g竖直运动3)T=F*R扭矩(同步带、齿条、各类带传动情况下)负载匀速扭矩(丝杆传动)4)T = F∗Pb2∗π∗ηF:力(N)m:质量(kg)g:重力加速度(9.8N/kg)μ:摩擦系数T:扭矩(N.m)J:惯量(kg.m2)β:角加速度(rad/s2)R:(与力相连的轮子的半径,单位m)Pb:丝杆导程(m)η:机械传动效率四:惯量、加速扭矩直线加速运动:1)F=m*a惯性力矩2)a=v/t加速度a:加速度(m/s2)圆周加速运动:1)T=j*β惯性扭矩2)J=m*r2转动惯量3)β=ω/t 角加速度4)ω=2*π*N角速度5)J=m(Pb2π)2丝杆负载直线运动质量等价转动惯量等价推导公式:J=m(2πr2π)2=mr2T:扭矩(N.m)J:惯量(kg.m2)ω:角速度rad/s (360度=2πrad)β:角加速度(rad/s2)t:加速时间(s)Pb:丝杆导程(m)m:质量(kg)五、基本参数普通电机功率:P = k∗F∗Vη电机功率选择k:工况系数 1.5-3F:负载F=μ*m*gη:机械传动效率,效率=齿轮*齿轮*轴承*链轮 0.5-0.8 例:P=2*100*10*0.2*0.5/0.6=370W其中:2 系数K100 负载质量10 重力加速度0.2 摩擦系数0.5 负载速度0.6 效率控制电机J:惯量(kg.m2)V:线速度 m/sω:角速度rad/s (360度=2πrad)β:角加速度rad/s²例如:电机转速V=1500rpm角速度ω=2π*1500/60角加速度β=(2π*1500/60)/0.2s加速时间:普通电机 0.5s控制(步进)电机 0.2s加速惯量矩T =J*β补充说明旋转扭矩的计算:由外部负荷引起的摩擦扭矩(匀速扭矩、负载扭矩)摩擦扭矩如下∶电机快速选型时电机扭矩:T= K*T1步进电机 K= 6伺服电机 K= 2或3丝杆惯量:1、每单位长度的丝杠轴惯量为:H(根据选定的型号查参数表)假设丝杠轴全长L(行程+螺母长度+轴端)丝杆惯量∶J= H X L2、计算丝杠轴的惯量也可以自己使用圆柱体绕自身中心线旋转的转动惯量计算公式:J:转动惯量,单位:kg·cm²;m:丝杠轴质量,单位:kg;r: 丝杠半径,单位:cm;丝杠上的负载惯量(直线运动惯量)计算公式为:J:负载惯量,单位:kg·cm²;m: 负载质量,所有被驱动的直线运动部件的质量总和,单位:kg;A:皮带主动轮转一圈或者齿轮转一圈负载的行程,单位:cm;加减速机折算到电机轴上的转动惯量:。
伺服电机选型计算公式
【伺服电机基本三要素】1、转数N:根据客户实际要求,对于同等功率电机可选配不同转数电机,一般来说,转数越低,价格越便宜。
2、扭矩T:必须满足实际需要,但是不需要像步进电机那样留有过多的余量。
3、惯量J:根据现场要求选用不同惯量的电机,如机床行业一般选用大惯量的伺服电机。
【伺服电机功率基本计算】输出功率P = 0.1047*N*T式中N为旋转速度,T为扭矩。
旋转速度基本为3000转。
扭矩T = r*M*9.8式中r为轴半径,M为物体重量。
【伺服电机功率选择要点】电动机的功率,应根据生产机械所需要的功率来选择,尽量使电动机在额定负载下运行。
如果电动机功率选得过小,就会出现“小马拉大车”现象,造成电动机长期过载,使其绝缘因发热而损坏。
甚至电动机被烧毁。
如果电动机功率选得过大,就会出现“大马拉小车”现象,其输出机械功率不能得到充分利用,功率因数和效率都不高,不但对用户和电网不利。
而且还会造成电能浪费。
【伺服电机功率实际选型计算方法】1、要正确选择电动机的功率,必须经过以下计算或比较:功率P = F*V /1000 (P=计算功率KW,F=所需拉力N,V=工作机线速度M/S)2、对于恒定负载连续工作方式,可按下式计算所需电动机的功率:P1(kw):P=P/n1n2式中n1为生产机械的效率;n2为电动机的效率,即传动效率。
按该公式求出的功率P1,不一定与产品功率相同。
因此,所选电动机的额定功率应等于或稍大于计算所得的功率。
3、用类比法来选择电动机的功率:所谓类比法,就是与类似生产机械所用电动机的功率进行对比。
具体做法是:了解本单位或附近其他单位的类似生产机械使用多大功率的电动机,然后选用相近功率的电动机进行试车。
试车的目的是验证所选电动机与生产机械是否匹配。
验证的方法是:使电动机带动生产机械运转,用钳形电流表测量电动机的工作电流,将测得的电流与该电动机铭牌上标出的额定电流进行对比。
如果电功机的实际工作电流与铭脾上标出的额定电流上下相差不大。
电机选型计算公式总结
电机选型计算公式总结功率:P=FV(线性运动)T=9550P/N(旋转运动)P——功率——WF——力——NV——速度——m/sT——转矩——N.M速度:V=πD N/60X1000D——直径——mmN——转速——rad/min加速度:A=V/tA——加速度——m/s2t——时间——s力矩:T=FL惯性矩:T=JaL——力臂——mm(圆一般为节圆半径R)J ——惯量——kg.m2 a ——角加速度——rad/s21. 圆柱体转动惯量(齿轮、联轴节、丝杠、轴的转动惯量)82MD J =对于钢材:341032-⨯⨯=gLrD J π)(1078.0264s cm kgf L D ⋅⋅⨯-M-圆柱体质量(kg);D-圆柱体直径(cm); L-圆柱体长度或厚度(cm); r-材料比重(gf /cm 3)。
2. 丝杠折算到马达轴上的转动惯量:2i Js J = (kgf·c m·s 2)J s –丝杠转动惯量(kgf·c m·s 2); i-降速比,12z z i =3. 工作台折算到丝杠上的转动惯量gw22⎪⎭⎫ ⎝⎛⋅=n v J π gw2s 2⎪⎭⎫ ⎝⎛=π (kgf·c m·s 2)角加速度a=2πn/60tv -工作台移动速度(cm/min);n-丝杠转速(r/min); w-工作台重量(kgf);g-重力加速度,g = 980cm/s 2; s-丝杠螺距(cm)2. 丝杠传动时传动系统折算到驱轴上的总转动惯量:())s cm (kgf 2g w 122221⋅⋅⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛+++=πs J J i J J S tJ 1-齿轮z 1及其轴的转动惯量; J 2-齿轮z 2的转动惯量(kgf ·cm ·s 2); J s -丝杠转动惯量(kgf ·cm ·s 2); s-丝杠螺距,(cm); w-工件及工作台重量(kfg).5. 齿轮齿条传动时折算到小齿轮轴上的转动惯量2gw R J =(kgf ·c m·s 2)R-齿轮分度圆半径(cm); w-工件及工作台重量(kgf)6. 齿轮齿条传动时传动系统折算到马达轴上的总转动惯量⎪⎪⎭⎫ ⎝⎛++=2221g w 1R J i J J tJ 1,J 2-分别为Ⅰ轴,Ⅱ轴上齿轮的转动惯量(kgf ·c m·s 2);R-齿轮z 分度圆半径(cm);w-工件及工作台重量(kgf)。
伺服电机选型计算公式

伺服电机选型计算公式伺服电机选择的时候,首先一个要考虑的就是功率的选择。
一般应注意以下两点:1。
如果电机功率选得过小.就会出现“小马拉大车”现象,造成电机长期过载,使其绝缘因发热而损坏,甚至电机被烧毁。
2。
如果电机功率选得过大.就会出现“大马拉小车”现象,其输出机械功率不能得到充分利用,功率因数和效率都不高,不但对用户和电网不利。
而且还会造成电能浪费。
也就是说,电机功率既不能太大,也不能太小,要正确选择电机的功率,必须经过以下计算或比较:P=F*V/100(其中P是计算功率,单位是KW,F是所需拉力,单位是N,V是工作机线速度m/s)此外.最常用的是采用类比法来选择电机的功率。
所谓类比法,就是与类似生产机械所用电机的功率进行对比。
具体做法是:了解本单位或附近其他单位的类似生产机械使用多大功率的电机,然后选用相近功率的电机进行试车。
试车的目的是验证所选电机与生产机械是否匹配。
验证的方法是:使电机带动生产机械运转,用钳形电流表测量电机的工作电流,将测得的电流与该电机铭牌上标出的额定电流进行对比。
如果电功机的实际工作电流与铭脾上标出的额定电流上下相差不大,则表明所选电机的功率合适。
如果电机的实际工作电流比铭牌上标出的额定电流低70%左右.则表明电机的功率选得过大,应调换功率较小的电机。
如果测得的电机工作电流比铭牌上标出的额定电流大40%以上.则表明电机的功率选得过小,应调换功率较大的电机。
实际上应该是考虑扭矩(转矩),电机功率和转矩计算公式。
即T = 9550P/n式中:P —功率,kW;n —电机的额定转速,r/min;T —转矩,Nm。
电机的输出转矩一定要大于工作机械所需要的转矩,一般需要一个安全系数。
机械功率公式:P=T*N/97500P:功率单位W;T:转矩,单位克/cm;N:转速,单位r/min。
电机皮带轮选型计算公式

电机皮带轮选型计算公式在工业生产中,电机皮带轮是一种常见的传动装置,它通过皮带的转动来传递电机的动力,从而驱动其他设备或机械。
在选用电机皮带轮时,需要根据具体的工作条件和要求来进行计算和选型,以确保传动系统的稳定性和可靠性。
本文将介绍电机皮带轮选型计算公式及其应用。
1. 传动比的计算。
传动比是指电机皮带轮的转速与被驱动设备的转速之比,通常用i表示。
传动比的计算公式为:i = N1 / N2。
其中,N1为电机皮带轮的转速,N2为被驱动设备的转速。
2. 皮带轮直径的计算。
在选型时,需要根据传动比和工作转速来计算电机皮带轮的直径。
皮带轮直径的计算公式为:D = (N1 D2) / (N2 i)。
其中,D为电机皮带轮的直径,D2为被驱动设备的皮带轮直径。
3. 功率的计算。
在选型时,还需要根据传动比和工作功率来计算电机皮带轮的功率。
功率的计算公式为:P = P2 i。
其中,P为电机皮带轮的功率,P2为被驱动设备的功率。
4. 载荷的计算。
在选型时,还需要根据传动比和工作载荷来计算电机皮带轮的载荷。
载荷的计算公式为:F = F2 / i。
其中,F为电机皮带轮的载荷,F2为被驱动设备的载荷。
5. 选型注意事项。
在进行电机皮带轮的选型时,需要注意以下几点:(1)根据传动比和工作转速来计算电机皮带轮的直径,确保传动系统的稳定性和可靠性。
(2)根据传动比和工作功率来计算电机皮带轮的功率,确保传动系统的工作效率和安全性。
(3)根据传动比和工作载荷来计算电机皮带轮的载荷,确保传动系统的承载能力和使用寿命。
(4)在选型时,还需要考虑电机皮带轮的材质、结构和安装方式等因素,以满足具体的工作条件和要求。
综上所述,电机皮带轮选型计算公式是根据传动比、工作转速、功率和载荷等因素来进行计算和选型的。
在选型时,需要根据具体的工作条件和要求来确定电机皮带轮的直径、功率和载荷,以确保传动系统的稳定性和可靠性。
希望本文对您有所帮助,谢谢阅读!。
电机选型计算公式表-雷赛

a cos a)
安全系数
S=
1.5
电机惯量
JM=
0.0011 kgm2
减速机减速比
i=
4
机械结构 参数:
速度: 滑动部分质 量 丝杠长度
丝杠直径 丝杠导程 连轴器质量 连轴器直径 摩擦系数 移动距离 机械效率 定位时间 加减速时间 比 外力 移动方向与 水平轴夹角
1)速度曲 线
加速时间
2)电机转 速
3)负荷转 矩计算
丝杠水平 运动选型 计算表格
Vl=
120 m/min
M=
70 kg
LB=
0.8 m
DB=
0.032 m
PB=
0.04 m
MC
2 kg
DC
0.05 m
μ=
0.1
L=
0.5 m
η=
0.9
t=
0.5 s
A=
25%
FA=
0N
a=
0°
t0= t*A
= 0.125
s
NM = Vl /PB
= 3000rຫໍສະໝຸດ m轴向负载F = FFAA+ mg(sin a cos a)
= 68.6
N
FPB 2
= 0.000650606 kgm2
JC=
1 8
mDC 2
= 0.000625
kgm2
JL= JL+JB+JC
= 0.004112586 kgm2
2 Nm(Jm Jl)
TS=
60t1
= 13.10068721 Nm
TM= (TL+TS)*S
= 20.37889772 Nm
根据计算, 初步确定电 机型号,然 后输入转子 惯量,确认 TM
负载12公斤的电机选型计算公式
负载12公斤的电机选型计算公式
电机的选型计算是非常重要的工作,它决定了电机能否顺利完成所需的工作任务。
本文将介绍负载12公斤的电机选型计算公式。
1. 计算负载的惯性矩
负载的惯性矩是电机选型的重要参数,它的计算公式如下:
J = (m × r)/2
其中,J为负载的惯性矩,m为负载的质量,r为负载的半径。
假设负载的半径为10cm,质量为12kg,则负载的惯性矩为:
J = (12 × 0.1)/2 = 0.06 kg·m
2. 计算电机的转矩
电机选型的另一个重要参数是转矩,它的计算公式如下:
T = J ×α
其中,T为电机的转矩,J为负载的惯性矩,α为电机的加速度。
假设电机的加速度为100 rad/s,则电机的转矩为:
T = 0.06 × 100 = 6 N·m
3. 计算电机的额定功率
电机的额定功率决定了它能够承受的负载大小,它的计算公式如下:
P = T × n/9550
其中,P为电机的额定功率,T为电机的转矩,n为电机的转速。
假设电机的额定转速为1500 rpm,则电机的额定功率为:
P = 6 × 1500/9550 = 0.94 kW
综上所述,负载12公斤的电机选型计算公式为:J = (m × r)/2,T = J ×α,P = T × n/9550。
通过这些公式,我们可以得到所需的电机参数,从而进行选型和匹配。
三相电机选型及计算案例
三相电机选型及计算案例1.选型计算通用公式P功率(W)T转矩(N.M)N转速(R/min)P=T.N/9550T=P.9550/NP=F.V(直线运动)P=T.ω(圆周运动)速度V线速度m/sN转速n/minω角速度rad/s(360度=2πrad)N=V*1000*60/(2πR)物体速度和滚轮转速的关系ω=2πN/60圆周运动常用转速转化为角速度来计算N=V*60*1000/Pb丝杆线速度与转速关系N转速三相异步电机(1500/3000/1000)步进电机(600R以下)伺服电机(3000R左右)减速机的核心减速增矩电机转速除以算出来的转速,等于整个系统的传动比i负载的受力情况水平直线运动:F=μmgF力(N)m质量(kg)g重力加速度g=10n/kg竖直运动:F=mg圆周运动:T=j*βT扭矩(n.m)j惯量(kg.m^2)β角加速度(rad/s^2)同步带、齿条、各类带传动情况下:扭矩T=F.RR(与力相连的轮子的半径)丝杆传动:扭矩T=F*Pb/(2π*η)惯量直线运动F=maa=v/ta加速度(m/s^2)圆周运动T=j*βj=mr^2β=ω/tω=2πNT扭矩(n.m)j惯量(kg.m^2)ω角速度rad/s(360度=2πrad)β角加速度(rad/s^2)t加速时间(s)2.常见产品案例例题1:皮带输送机负载重量400KG速度30M/min滚子直径200MM总效率η=百分之75摩擦系数0.2安全系数k=1.8求:电机功率转速扭矩减速比(12345678910)求大小链轮齿数解法1:F=μmg=0.2*400*10=800NP=F.V*k/η=800*0.5*1.8/0.75=960W=0.96kw(取1kw)N=V*1000*60/(2πR)=30*1000/3.14/2/100=48r/min设电机转速为1500则电机转矩T=P*9.55/1500=6.1n.m则减速比为1500/48=31.25(取31)选择10设小链轮齿数为17则大链轮齿为17*3.1=53解法2:F=μmg=0.2*400*10=800NT=F.D/2=800*0.2/2=80n.m(滚子转矩)N=V*1000*60/(2πR)=30*1000/3.14/2/100=48r/min设电机转速为1500减速比为1500/48=31.25(取31)选择10设小链轮齿数为17则大链轮齿为17*3.1=53电机的扭矩等于T(负载)/i=t(电机)=80/31=2.58nm电机需要的理论功率为P=TN/9550=2.58*1500/9550=0.4KW电机实际功率等于p*k/η=0.4*1.8/0.75=0.96kw(取1kw)。
步进电机选型惯量计算公式
步进电机选型惯量计算公式步进电机是一种将电脉冲信号转换为机械位移的电机,它的运动是通过控制电流的大小和方向来实现的。
在实际应用中,步进电机的选型是非常重要的,其中惯量是一个重要的参数。
本文将介绍步进电机选型中惯量的计算公式,帮助读者更好地理解步进电机的特性和选型方法。
步进电机的惯量计算公式如下:J = (Jm + Jl) (N^2)。
其中,J表示步进电机的总惯量,Jm表示电机自身的转动惯量,Jl表示负载的转动惯量,N表示减速比。
步进电机的惯量是指电机在转动过程中所具有的惯性,它的大小直接影响着电机的动态响应和控制精度。
在实际应用中,通常需要根据具体的负载情况和控制要求来选择合适的步进电机,而惯量就是一个重要的考虑因素。
首先,我们来看一下步进电机的转动惯量Jm。
步进电机的转动惯量是指电机自身在转动过程中所具有的惯性,它与电机的结构和材料有关。
通常情况下,可以通过电机的技术参数来获取Jm的数值。
在选型过程中,需要根据具体的应用要求来确定Jm的大小,以确保电机的动态响应和控制精度满足要求。
其次,我们来看一下负载的转动惯量Jl。
负载的转动惯量是指负载在转动过程中所具有的惯性,它与负载的结构和材料有关。
在实际应用中,通常需要通过实验或者仿真来获取Jl的数值。
在选型过程中,需要将负载的转动惯量考虑在内,以确保电机能够满足负载的要求。
最后,我们来看一下减速比N。
减速比是指电机输出轴的转速与驱动轴的转速之比,它与传动装置的结构和参数有关。
在实际应用中,通常需要根据负载的要求和控制精度来确定减速比的大小。
在选型过程中,需要将减速比考虑在内,以确保电机能够满足负载的要求。
综上所述,步进电机的惯量计算公式可以帮助我们更好地理解步进电机的特性和选型方法。
在实际应用中,需要根据具体的负载情况和控制要求来选择合适的步进电机,并将惯量考虑在内,以确保电机能够满足要求。
希望本文能够对读者有所帮助,谢谢!。
AGV驱动电机选型计算公式
单位AGV运行参数圆周率π重力加速度g m/s^2支撑轮滚动阻力系数f AGV运行坡度角α度AGV车自重G1kg AGV车载重GkgAGV动力轮数量(即驱动电机数量)N 驱动轮直径D mm 驱动轮静摩擦系数μ运行速度V m/s 加速时间t s 电机输出轴转速n 总效率η减速机服务系数(电机安全系数)k 传动比i运行参数计算AGV车总质量mkg 驱动轮转速n=1000V/(π*D)*60rpm 总传动比i 加速度a=V/t m/s^2加速距离s=V*V/2a m agv行驶阻力计算agv滚动阻力计算(静态力)Ff=mg*f N agv加速阻力计算(动态力)Fj=ma N agv坡度阻力计算Fi=mg*sin αN agv行驶阻力(等于AGV所需的牵引力)∑F=Ffji N agv行驶总阻力矩∑M=∑F*R Nm 扭矩与功率计算减速机输出轴转速njrpm 减速机负载扭矩(单台)Tj=∑M/N Mm 电机输出扭矩(单台)T=Tj/NMm 减速机所需配备电机功率(单台)Pj=Tj*nj/9550/η 或Pj=FV/1000/η/N kW 电机额定功率P0=Pj/ηkW 单驱动轮所需牵引力F牵=∑F/N N 驱动轮所需的正压力Fn=F牵/μ/g kg 电机输出轴转速n rpm 电机输出扭矩Nm 在D 列填入选型参数以下自动计算,勿修改,选中相应结果框可在顶上输入栏看到公式数据3.149.810.021.00150.002850.004.00200.000.402.0010.000.851.2515.003000.00190.9915.000.2010.00588.42600.00513.471701.89170.19190.9942.5510.641.001.18425.47108.462864.793.34。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
附录1:根据负载条件选用电机 电机轴上有两种负载,一种是转矩负载,另一种是惯量负载。选用电机时,必须准确计算这些负载,以便确保满足如下条件: §(1). 当机床处于非切削工作状态时,在整个速度范围内负载转矩应小于电机的连续额定转矩。 如果在暂停或以非常低的速度运行时,由于摩擦系数增大,使得负载转矩增大并超过电机的额定转矩,电机有可能出现过热。另一方面,在高速运行时,如果受粘滞性影响,而使转矩增大且超过额定转矩,由于不能获得足够的加速转矩,加速时间常数有可能大大增加。 §(2). 最大切削转矩所占时间(负载百分比即“ON”时间)满足所期望的值。 §(3). 以希望的时间常数进行加速。一般来说,负载转矩有助于减速,如果加速不成问题,以同一时间常数进行减速亦无问题。加速检查按以下步骤进行。 (I)假设电机轴按照NC或位控所确定的ACC/DEC方式进行理想的运动来得到加速速率。 (II)用加速速率乘以总惯量(电机惯量+负载惯量)计算出加速转矩。 (III)将负载转矩(摩擦转矩)与加速转矩相加求得电机轴所需转矩。 (IV)需要确认,第(III)项中的转矩应小于电机的转矩(最大连续转矩),同时,小于伺服放大器电流限制回路所限制的转矩。 第(II)项中的加速转矩由下式来计算。 A.对于线性加速情况
TNtJJeNNtKeamamlKtrMasKtsasa60211111 式中:Ta: 加速转矩(Kg·Cm) NM: 快速进给时的电机速度(rpm) ta: 加速时间(sec)
Jm: 电机惯量(Kg·Cm·S2) 1
Jl: 负载惯量(Kg·Cm·S2) Nr: 加速转矩减小时的始点(不同于Nm)(rpm) Ks: 伺服位置环增益(Sec-1)
B. 对于指数加减速情况
图中:TNtJJmlml06021() KKs时,Ktee1, aKKes TNam60211aKJJasml NNarmaa11 KKs时, TNKeJJameMl602, 式中,e2718.
NNeNrmm110632.
C.指令速度突加情况
TNtJJamsml6021 式中,tKss1 2
§(4). 快进频率: 一般来讲,在正常切削加工中,此项不成问题,但对于特殊加工设备来说(如冲压、钻床、激光加工、包装机械等),要求频繁快速进给,此时,需要检查是否由于频繁加、减速而使电机过热。在这种情况下,应计算每个循环电机转矩的均方根(RMS)值,以保证此值小于电机的额定转矩。
TTTtTtTTtTttRMSaffaf2122210230 式中:Ta: 加速转矩 Tf: 摩擦转矩 To: 停止时的转矩
§(5). 当负载条件在一个循环周期内变化不定时,TRMS按下式计算,并确认此值在电机的额定转矩范围内。
TTtTtTtTttRMSnn12122232320 3
式中:to=t1+t2+t3+…+tn
§(6). 负载惯量限制 负载惯量的大小对于伺服系统的动态性能及快进加/减速时间有很大影响。对 于大的负载惯量,当指令速度改变时,电机需要更长的时间达到指令速度,当多轴联动进行圆弧插补切削时,跟踪误差就大于较小惯量时的情况从而影响加工精度。 通常,当负载惯量小于电机转子惯量时,上述问题不会出现。如果大于转子惯量3倍,动态影响就会变差,用于加工普通金属的机械,还不存在任何实际问题。不过,在诸如以高速加工各种形状复杂的木材的木工机械等特殊场合,最好使负载惯量小于转子惯量。 当负载惯量大于转子惯量3倍时,就会牺牲响应时间。如果大大超过3倍,恐怕超出伺服放大器的参数调整范围,因此,应避免这种使用。由于机械设计限制,而无法小于3倍转子惯量时。 4
附录2: 负载转矩计算 施加于电机轴上的负载转矩通常用以下简单公式计算。 TFlTLc2 式中:TL: 电机轴上的负载转矩(Kgcm) F : 需要使滑台(工作台或刀架)以轴向运动的力(Kg) η: 传动系统的效率。 l: 电机轴每转机械移动量 Tc: 不包含在“η”内的滚珠丝杠副,轴承等部件折算到电机轴上的摩擦转矩。 F取决于工作台重量,摩擦系数,水平或垂直方向的切削推力,垂直轴场合是否配重平衡等因素。在水平方面使用场合,F值大小下图所给举例计算如下: 非切削时间:FWfg
切削时间: FFWfgFfcC 式中: W:滑台重量(工作台及工件)(Kg)
μ: 摩擦系数 fg: 拉紧销拉紧力 Fc: 由切削力产生的反向推力(Kg) Fcf: 工作台相对导轨表面由切削运动而产生的力(Kg)
计算转矩时,务必注意如下几点: (1)必须充分考虑由于拉紧销的夹紧产生的摩擦转矩。一般来说,由滑动体的重量和摩擦系数计算出的转矩值很小。请务必注意由于拉紧销的夹紧力及滑台表面的精度而产生的转矩。 (2)有两种情况不可忽略,一种是由于滚珠和滚珠螺母的预紧力引起的滚动接触部件的摩擦转矩,另一种是丝杠的预紧力产生的摩擦转矩。特别对于小型机械来讲,此转矩对整个转矩有很大影响,因此,必须加以考虑。 (3)必须考虑由于切削反作用力引起的滑动表面摩擦力的增大因素。一般来说,切削反作用力的吸收点与驱动力的吸收点不在同一位置,滑动体表面的负载就会由于吸收大的
5
切削反作用力而产生的运动而增大,如下图所示。计算切削过程中的转矩时,必须考虑由于这种负载而引起的摩擦转矩的增大。
(4)进给速率对摩擦转矩产生很大影响。必须对不同速度下摩擦力的变化,工作台支撑体(滑台,滚动体,静压),滑动体表面材料及润滑条件进行研究和测量,以便得到准确数据。 (5)通常,即使是同一种机械,摩擦转矩也依调整状态,环境温度或润滑条件等因素而发生变化。计算负载转矩时,请设法对同种机械进行测量,并对测量数据进行处理以便得到准确数值。也就是说,必须对夹紧力,间隙进行调整,来有效地控制摩擦转矩,以便避免产生过大转矩。
另一种计算折合到电机轴上的负载转矩的方法如下: TWPRNmLB982. (水平直线运动轴)
式中:PB:滚珠丝杠螺距(m) 1/R: 减速比
TWWPRNmLCB982. (垂直直线运动轴) 式中:Wc:配重块重量(Kg)
TTRNmLl (旋转轴运动) 式中:Tl:负载转矩 (Nm) 6
附录3: 负载惯量计算 与负载转矩不同的是,只通过计算即可得到负载惯量的准确数值。不管是直线运动还是旋转运动,对所有由电机驱动的运动部件的惯量分别计算,并按照规则相加即可得到负载惯量。由以下基本公式就能得到几乎所有情况下的负载惯量。
1.圆柱体的惯量
由下式计算有中心轴的圆柱体的惯量。如滚珠丝杠,齿轮等。 JDLK329804 (Kg·cm·sec2)或 JLDKgmK3242
式中:γ:密度(Kg/cm3) 铁:7.87×10-3Kg/cm3=7.87×103Kg/m3 铝:2.70×10-3Kg/cm3=2.70×103Kg/m3 JK:惯量(Kg·cm·sec2)(Kg·m2) D : 圆柱体直径(cm)..(m) L : 圆柱体长度(cm)..(m)
2.直线运动体的惯量 用下式计算诸如工作台、工件等部件的惯量
JWPLB129802 Kgcmsec2
WPB22 Kgm2 式中:W :直线运动体的重量(Kg) PB: 以直线方向电机每转移动量(cm)或(m)
3.有变速机构时折算到电机轴上的惯量 7
ZZ21,:齿轮齿数 JZZJL11220 Kgcmsec2 Kgm2 4.具有图中所示旋转中心的圆柱体的惯量
JJMR02980 Kgcmsec2 式中:J0:圆柱体中心周围的惯量Kgcmsec2 M: 圆柱体重量(Kg) R: 旋转半径(cm)
5.空心圆柱体的惯量
JLDD329800414 8
式中:γ:密度 (Kg/cm3) L : 柱体长度(cm) Do:柱体外径(cm)
D1:柱体内径(cm)
6.对于垂直轴直线运动,当有配重时,务必考虑配重体的惯量,此时, JWWPRKgmLCB1222 式中: Wc:配重体重量(Kg) 1/R: 减速比 PB: 滚珠丝杠螺距(m) 9
附录4: 运转功率及加速功率计算 在电机选用中,除惯量、转矩之外,另一个注意事项即是电机功率计算。一般可按下式求得。
1.运转功率计算 PNTML0260 (W) 式中:P0 : 运转功率(W) NM: 电机运行速度(rpm) TL : 负载转矩(Nm)
2.加速功率计算 PNJtaMLa2602 式中: Pa: 加速功率 (W) NM: 电机运行速度 (rpm) Jl:负载惯性 ()kgm2 ta : 加速时间常数(sec)