贴片机视觉系统
半导体贴片机的结构原理
半导体贴片机的结构原理
半导体贴片机是一种用于将半导体元器件(如集成电路、二极管、三极管等)贴附到电路板上的自动化设备。
其结构原理包括以下几个部分:
1. 输送系统:半导体元件通常以卷带的形式供应,输送系统主要用于将卷带中的元件分离并传送到贴片区域。
输送系统通常由供料轮、分离轮、传送带等组成。
2. 传感系统:传感系统用于检测贴片区域是否有无元件、元件位置是否准确等信息。
传感系统通常采用光电传感器、激光传感器等。
3. 位置校准系统:位置校准系统用于确保贴附到电路板上的元件位置准确。
位置校准系统通常包括视觉定位系统和机械定位系统。
视觉定位系统通过摄像头或激光扫描仪等设备来检测电路板上的参考点,然后通过图像处理算法来确定元件的准确位置。
机械定位系统则通过精密的导轨和定位装置来确保元件的精准贴附。
4. 贴附系统:贴附系统用于将元件粘附到电路板上。
通常使用真空吸盘来吸起元件,然后通过运动轨迹控制将元件准确贴附到电路板上,并使用热风或红外线加热等方式将元件与电路板焊接。
5. 控制系统:控制系统用于控制整个贴片机的运行。
通常采用微控制器或PLC 等控制器来完成元件供料、位置校准、贴附等动作的控制,并与操作面板、传感器等进行连接。
综上所述,半导体贴片机的结构原理是通过输送系统将元件供应到贴片区域,通过传感系统检测元件信息,通过视觉定位和机械定位系统确定元件位置,然后通过贴附系统将元件粘附到电路板上,并通过控制系统进行整个贴片过程的控制。
贴片机视觉系统
. 随着电子设备对小型,轻型,薄型和可靠性的需求,促使各种新型器件特别是细微间距器件得到迅速发展,被越来越多的用在各类电子设备上,于是对SMT中的关键设备----贴片机的贴片精度提出了更高的要求.本文从应用角度对FUJI(主要是IP3和CP6)和SIEMENS(S80F)贴片机的视觉系统进行了详细对比.1,机器视觉系统的原理贴片机视觉系统是以计算机为主体的图象观察,识别和分析系统.它主要采用摄象机为计算机感觉的传感部件,或称探测部件.摄象机感觉到在给定视内目的物的光强度分布,然后将其转换成模拟电信号,再通过A/D转换器被数字化成离散的数值,这些数值表示视野内给定的平均光强度,这样得到的数字影象被规则的空间网格覆盖,每个网格叫做一个像元.显然,在像元阵列中目的物影象占据一定的网格数.计算机对包含目的物数字图象的像元阵列进行处理,将图象特征与事先输入计算机的参考图象进行比较和分析判断,根据其计算结果计算机向执行机构发生指令.在机器视觉系统中灰度分辨率.灰度值法是用图象多级亮度来表示分辨的大小,灰度分辨率规定在多大的离散值是机器给定的测量光强度,需要处理的光强越小,灰度分辨率就越高.2,视觉系统的构成贴片机视觉系统由视觉硬件和软件组成.硬件一般由影象探测,影象存储和处理以及影象显示3部分组成.摄象机是视觉系统的传感部件,用于贴片机的视觉采用固态摄象机,CCD摄象机.固态摄象机的主要部分是一块集成电路,集成电路芯片上制作有许多细小光敏元件组成的CCD阵列,每个光敏元件输出的电信号与被观察目标上相应反射光强度成反比,这一电信号作为一像元的灰度被记录下来.象元件坐标决定了该点在图象中的位置.摄象机获取大量信息有微处理机处理.处理结果由工业电视显示.摄象机与微处理机,微处理机与执行机构及显示器之间有通讯电缆连接,一般采用RS232串行通讯接口.3,视觉系统的精度影响视觉系统精度的主要因素是摄象机的像元数和光学放大倍数.摄象机的像元数越多,精度就越高;图象的放大倍数越高,精度就越高.因为图象的光学放大倍数越大,对于给定面积的象元数就越多,所以精度就越高.在FUJI的IP3上,在贴脚宽0.15MM的器件时就采用了精密的需要.不过,放大倍数过大,寻找器件更加困难,容易丢件,降低了帖装率.所以要根据实际需要选择合适的光学放大倍数.4,FUJI和SIEMENS视觉系统的比较1,PCB的精确定位FUJI的IP和CP均有一个专用的MARK CAMERA,用来获取PCB上的标是点位置,大小和形状,读取中心位置.在PCB进行定位时,PCB上需要至少2个表示点(基于X,Y TABLE水平的状态下)依次围绕每个表示点中心,在一定范围内搜索,如未发现目标,就扩大搜索范围(程序中可设定).确定表示点位置后,与程序中的坐标比较,判断的出偏差,具体反映在X,Y,Q3个值只能感,然后来修正贴装坐标,SIEMENS也大致相同.2,器件检测和定心FUJI使用一大一小2个摄象机进行不同元件的识别和对中,同时执行检测功能.对于不同的器件使用不同的照射方式,J型脚(PLCC,SOJ,BGA)采用前灯(FRONTLIGHT)照射方式,其他采用后灯方式.帖装头上的吸嘴在有程序指定FEEDER位置吸取器件,吸取要尽量在器件的中心点上,特别是对于PLCC84等较大的器件,这一点很必要,否则在图象处理时,常常通不过.吸取到了一确定位置上,获取元器件的形状图象后,通过特殊的算法(因器件而已)获取边缘数据,得出中心位置,与程序内的数据比较,得出X,Y.Q的偏差值,给去校正数据的同时,执行如下各项检测功能:实际器件与PART DATA所描述的器件有否偏差9(封装:包括引脚树,引脚位置,引脚长度,外型大小),引脚有无歪曲,引脚的共面性,以及极性检测等.贴片机在执行检测功能时,将被检测器件的各项特征与存储的封装器件进行比较,如果同不过检测,则可能器件封装出错,或者料上错,或者器件有缺陷,系统就会令贴装头将器件送入抛料盒.FUJI提供了工业CRT显示器可观察器件的图象通过机器上的现场控制台,可手动操作,获取真实器件的图象,有多种方式可检查器件程序内的封装和实际的差别,CRT能提示哪里出错了(BUG),在出错时屏幕还提供了错误代码,方便于分析产生错误的原因,并提供修改的建议.在视觉软件中,对不同的器件有不同的VISION TYPE,这就是不同的图象处理算法,对不同器件的引脚有不同的灰度解决方案,对引脚有不同的照射顺序,可对引脚树进行验证,对于有极性的器件还可进行极性检测,体现了贴篇机的适应性大小.SIEMENS80F4也是属于多功能机,她有2组贴片头,分别是旋转头和IC头,前者有12个贴片头组成,最大可以贴装PLCC44,而IC头可以贴装到55MM855MM的器件.SIEMENS有3个CAMERA,分别是PCB,COMPONENT和IC,PCB主要是用来对照机器上的标志点和PCB上的标志点的.COMPONENT位于旋转头的上方,用来对小器件进行光学对中,调整贴片位置,而IC则主要是对大器件进行光学对中.SIEMENS有3种主要的照相方式,分别是放块器件(比如一般的CHIP元件)SO器件,BGA.在对CHIP元件进行光学对中时,只有平行光,只对器件的边缘进行确认,从而找到器件的中心,算出贴片机需要调整的误差.而队SO类器件进行光学对中的同时,还要对各个管脚的相对位置进行检测,每一个焊球进行检测,位置和焊球的亮度都是检测内容.SIEMENS叫FUJI在对PLCC进行图象处理有明显的优势,主要原因是FUJI的光源是平行光,对于J型管脚的处理结果就是一样,只对J型管脚的最下端有反射.相比较而言,SIEMENS的光源有侧光,对J型管脚的斜面也有反射图象,能对PLCC进行比较全面的光学检测.SIEMENS在贴装PLCC上也有优势,而且侧光在对BGA进行光学检测时也起着重要的作用.5,结语在对FUJI和SIEMENS的视觉系统的比较中,我们更深的认识了贴片机的图象处理技术,可以看出,高精度贴片机综合了计算机,光,电子,自动控制等多种现代高科技技术,随着这些技术日新月异的发展,贴片机会向着更高速,更高精度,更强功能的方向发展.把使用贴片机的心得撰成此文,希望与从事SMT贴片工作的同仁更多的互相交流,达到互相提高的目的.。
自动贴片机工作原理
自动贴片机工作原理
自动贴片机是一种用于电子元器件表面粘贴的设备。
其工作原理包括以下几个步骤。
首先,将待粘贴的电子元器件放置在一个料盘或者一个进料口中。
这些元器件通常是以细小的芯片形式存在,如电阻、电容、晶体管等。
然后,料盘或进料口会将元器件送入到机器的工作区域。
工作区域包括一个移动的平台,上面附有粘贴机构。
接着,机器会使用一个视觉系统来检测元器件的位置和方向。
视觉系统通常包括一个高分辨率的摄像头和图像处理算法。
通过分析待贴片元器件的特征,机器能够准确地确定其位置和方向。
然后,粘贴机构会使用一个真空吸盘将元器件吸附在其底部。
吸盘的设计能够确保元器件的牢固吸附,以便在后续的操作中保持其位置不变。
最后,粘贴机构会将元器件移动到粘贴位置并将其粘贴在目标位置上。
通常,这是通过将元器件轻轻按压在目标位置上来实现的。
整个过程是自动完成的,由机器内部的控制系统进行控制和协调。
这种自动化的过程可以大大提高生产效率和质量,并减少人力成本。
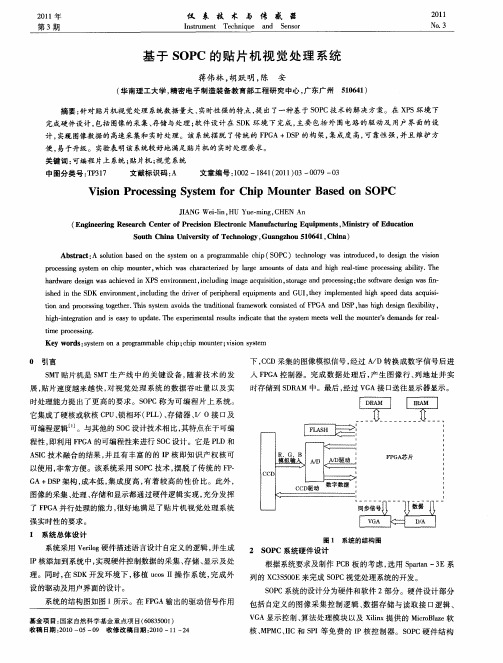
基于SOPC的贴片机视觉处理系统
JANG W e—i HU emig CHEN An I i n, l Yu — n ,
( n ier gR sac e tr f rc inE eto i Ma ua tr gE up nsMii r f d ct n E gnei ee rhC ne eio lc nc n fc i q ime t, ns yo uai n oP s r u n t E o S uhC iaU ies yo eh o g , a gh u5 04 , hn ) o t hn nv ri f c n l y Gu n z o 16 1 C a t T o i A s atA slt nbsdo ess m o rga al c i( O C)t h o g a t dcd t ds n tev i bt c : ou o ae n t yt napormm be hp S P r i h e e n l yw si r ue , ei io c o no o g h sn
计 , 图像数据 的高速采 集和实时处理 。该 系统摆脱 了传 统的 F G D P的 构架 , 实现 P A+ S 集成度 高, 可靠性 强, 并且 维护 方
便, 易于升级 。实验表 明该 系统较好地 满足 贴片机的 实时处理要求 。
关 键 词 : 编程 片上 系统 ; 片 机 ; 觉 系统 可 贴 视
i e n t e S n i n n ,n l d n h r e fp r h r le up n s a d GU ,h y i lme td h g p e aa a q ii s d i h DK e vr me t i cu i g t e d i ro e i e a q i me t n I t e mp e n e i h s e d d t c u s h o v p - i n r c s i g t e h r T i y tm v i st e t d t n l a w r o s e fF GA a d DS h s hs e i n f xb l y, f n a d p o e sn g t e . h ss se a od h a i o a r me o k c n itd o P n P, a ih d sg e ii t o o r i f s l i hg -ne r t n a d i e s p a e T e e p r na e u t id c t a e s se me t wel h u tr e n sf rr a— ih i tg ai n s a y t u d t . h x e i o o me tlr s l n iae t t h y t m es l t e mo ne ' d ma d o e l s h t s
高速贴片机结构与原理
高速贴片机结构与原理高速贴片机是一种用于电子元器件自动贴装的设备。
它以高速、高精度和高效率的特点广泛应用于电子制造行业。
本文将从结构和原理两个方面介绍高速贴片机的工作原理和组成部分。
一、结构高速贴片机主要由进料系统、定位系统、贴装系统和控制系统组成。
1. 进料系统:进料系统用于将电子元器件供给到贴装机的工作区域。
它通常包括供料器和进料传送带。
供料器负责将元器件从料盘或管道中取出,并通过进料传送带将其输送到贴装区域。
2. 定位系统:定位系统用于确定元器件在贴装区域的位置。
它通常包括视觉定位系统和机械定位系统。
视觉定位系统通过摄像头和图像处理算法实现对元器件位置的精确定位。
机械定位系统则通过传感器和精密导轨等装置实现对元器件位置的控制。
3. 贴装系统:贴装系统是高速贴片机的核心部分,用于将电子元器件精确地贴装到PCB板上。
贴装系统通常包括贴装头、压力控制装置和贴装平台。
贴装头负责将元器件从供料器中取出,并将其精确地贴装到PCB板上。
压力控制装置用于控制贴装头的压力,以保证贴装的稳定性。
贴装平台则提供一个稳定的工作台面,使贴装过程更加精确。
4. 控制系统:控制系统是高速贴片机的大脑,用于控制整个贴装过程。
它通常由计算机和PLC控制器组成。
计算机负责处理图像信息、控制贴装头的运动和监控贴装过程。
PLC控制器则负责控制进料系统、定位系统和贴装系统的运行。
二、原理高速贴片机的工作原理可以简单描述为以下几个步骤:1. 元器件供给:进料系统将电子元器件供给到贴装区域。
2. 定位检测:定位系统对元器件进行定位检测,确定其在贴装区域的位置。
3. 贴装操作:贴装系统根据定位信息,通过贴装头将元器件从供料器中取出,并精确地贴装到PCB板上。
4. 焊接固定:在贴装完成后,PCB板经过传送带运送到焊接区域,焊接机器对元器件进行焊接,固定在PCB板上。
5. 检测和排除故障:贴装过程中,控制系统会对贴装质量进行检测,如果发现贴装错误或故障,会及时进行排除。
贴片机的组成介绍
贴片机的组成介绍
贴片机又称贴装机、表面贴装系统,贴片机分为手动和全自动两种。
在生产线中,它配置在点胶机或丝网印刷机之后,是通过移动贴装头把表面贴装元器件准确地放置PCB焊盘上的一种设备。
从根本上说,贴片机由软、硬件两部分组成。
贴片机硬件部分由机械机构,其中包括机械主体、传动与驱动机构、气动真空系统以及其他机械机构;光学系统,其中包括视觉系统、光源及控制等;电子电路与计算机,其中包括传感器电路、图像处理、各种电子控制电路及工业计算机系统等3个主要部分。
贴片机软件部分由操作系统软件、机器控制软件及系统管理软件3个部分。
贴片机的工作原理

贴片机的工作原理
贴片机是一种用于表面贴装(Surface Mount Technology,SMT)制程的自动化设备,主要用于在电路板上精确地安装各种电子元件,如芯片、电容、电阻等。
贴片机的工作原理是通过一系列的自动化步骤来实现元件的快速、准确的贴装。
以下是贴片机的工作流程:
1. 供料:首先将所需的电子元件装载到供料器中。
供料器可以分为卷料供料器和盘料供料器两种类型。
卷料供料器将元件以卷带形式供给,而盘料供料器则将元件放在盘中供给。
2. 图像识别:接下来,贴片机会使用一或多个视觉系统来扫描并识别电路板上的元件位置和方向。
这些视觉系统通常包括高分辨率摄像头、图像处理软件和图像识别算法。
3. 贴附:一旦图像识别完成,贴片机会使用吸嘴将元件从供料器中抓取,并在预定位置上方的吸嘴上粘附。
吸嘴通常具有可调节的真空吸附能力,以确保正确地捕捉元件。
4. 定位:在被吸取的元件进入吸嘴上时,贴片机会将其移动到准确的位置,并根据预先设置的坐标和精度要求将其放置在电路板上。
贴片机通常具有多轴运动系统,可以在三个或更多轴上精确移动。
5. 焊接:完成元件放置后,电路板将通过传送带或其他装置移交给焊接设备进行焊接。
焊接方式可以是传统的浸泡式焊接
(波峰焊接)或表面贴装焊接(炉顶式焊接或热风焊接)。
整个过程中,贴片机通常由一个控制系统控制,该系统可根据预先设定的程序和参数来协调供料、视觉识别、精确定位和吸附动作。
这些参数包括元件尺寸、电路板布局、焊接要求等。
通过贴片机的高速和精确性,能够大大提高电子元件的贴装效率和质量,减少人工操作的错误和劳动强度。
besi贴片机定位原理
besi贴片机定位原理
贴片机是一种用于电子元件贴片的自动化设备,其定位原理涉
及到多个方面。
首先,贴片机通常配备了视觉系统,通过相机和图
像处理软件对PCB板上的元件进行识别和定位。
这种视觉定位原理
利用相机拍摄PCB板上的元件图像,然后通过图像处理软件识别元
件的位置、方向和尺寸,从而精确定位元件的贴合位置。
其次,贴片机还可以采用机械定位原理,通过精准的机械结构
和运动控制系统,将贴片头精确移动到元件需要贴附的位置。
这种
机械定位原理通常涉及到高精度的导轨、螺杆传动和伺服控制系统,确保贴片头能够准确地定位到目标位置。
另外,一些先进的贴片机还可能采用激光定位原理,通过激光
传感器对PCB板和元件进行扫描和测量,实现精确的定位。
激光定
位原理可以提供更高的定位精度和稳定性,特别适用于对定位精度
要求较高的应用场景。
除了上述几种常见的定位原理外,还有一些贴片机可能会结合
多种定位技术,如视觉定位和机械定位相结合,以实现更高的定位
精度和可靠性。
总的来说,贴片机的定位原理是多种技术的综合应用,以实现对电子元件的精确贴附和定位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
. 随着电子设备对小型,轻型,薄型和可靠性的需求,促使各种新型器件特别是细微间距器件得到迅速发展,被越来越多的用在各类电子设备上,于是对SMT中的关键设备----贴片机的贴片精度提出了更高的要求.本文从应用角度对FUJI(主要是IP3和CP6)和SIEMENS(S80F)贴片机的视觉系统进行了详细对比.
1,机器视觉系统的原理
贴片机视觉系统是以计算机为主体的图象观察,识别和分析系统.它主要采用摄象机为计算机感觉的传感部件,或称探测部件.摄象机感觉到在给定视内目的物的光强度分布,然后将其转换成模拟电信号,再通过A/D转换器被数字化成离散的数值,这些数值表示视野内给定的平均光强度,这样得到的数字影象被规则的空间网格覆盖,每个网格叫做一个像元.显然,在像元阵列中目的物影象占据一定的网格数.计算机对包含目的物数字图象的像元阵列进行处理,将图象特征与事先输入计算机的参考图象进行比较和分析判断,根据其计算结果计算机向执行机构发生指令.
在机器视觉系统中灰度分辨率.灰度值法是用图象多级亮度来表示分辨的大小,灰度分辨率规定在多大的离散值是机器给定的测量光强度,需要处理的光强越小,灰度分辨率就越高.
2,视觉系统的构成
贴片机视觉系统由视觉硬件和软件组成.硬件一般由影象探测,影象存储和处理以及影象显示3部分组成.
摄象机是视觉系统的传感部件,用于贴片机的视觉采用固态摄象机,CCD摄象机.固态摄象机的主要部分是一块集成电路,集成电路芯片上制作有许多细小光敏元件组成的CCD阵列,每个光敏元件输出的电信号与被观察目标上相应反射光强度成反比,这一电信号作为一像元的灰度被记录下来.象元件坐标决定了该点在图象中的位置.
摄象机获取大量信息有微处理机处理.处理结果由工业电视显示.摄象机与微处理机,微处理机与执行机构及显示器之间有通讯电缆连接,一般采用RS232串行通讯接口.
3,视觉系统的精度
影响视觉系统精度的主要因素是摄象机的像元数和光学放大倍数.摄象机的像元数越多,精度就越高;图象的放大倍数越高,精度就越高.因为图象的光学放大倍数越大,对于给定面积的象元数就越多,所以精度就越高.在FUJI的IP3上,在贴脚宽0.15MM的器件时就采用了精密的需要.不过,放大倍数过大,寻找器件更加困难,容易丢件,降低了帖装率.所以要根据实际需要选择合适的光学放大倍数.
4,FUJI和SIEMENS视觉系统的比较
1,PCB的精确定位
FUJI的IP和CP均有一个专用的MARK CAMERA,用来获取PCB上的标是点位置,大小和形状,读取中心位置.在PCB进行定位时,PCB上需要至少2个表示点(基于X,Y TABLE水平的状态下)依次围绕每个表示点中心,在一定范围内搜索,如未发现目标,就扩大搜索范围(程序中可设定).确定表示点位置后,与程序中的坐标比较,判断的出偏差,具体反映在X,Y,Q3个值只能感,然后来修正贴装坐标,SIEMENS也大致相同.
2,器件检测和定心
FUJI使用一大一小2个摄象机进行不同元件的识别和对中,同时执行检测功能.对于不同的器件使用不同的照射方式,J型脚(PLCC,SOJ,BGA)采用前灯
(FRONTLIGHT)照射方式,其他采用后灯方式.帖装头上的吸嘴在有程序指定FEEDER位置吸取器件,吸取要尽量在器件的中心点上,特别是对于PLCC84等较大的器件,这一点很必要,否则在图象处理时,常常通不过.吸取到了一确定位置上,获取元器件的形状图象后,通过特殊的算法(因器件而已)获取边缘数据,得出中心位置,与程序内的数据比较,得出X,Y.Q的偏差值,给去校正数据的同时,执行如下各项检测功能:实际器件与PART DATA所描述的器件有否偏差9(封装:包括引脚树,引脚位置,引脚长度,外型大小),引脚有无歪曲,引脚的共面性,以及极性检测等.
贴片机在执行检测功能时,将被检测器件的各项特征与存储的封装器件进行比较,如果同不过检测,则可能器件封装出错,或者料上错,或者器件有缺陷,系统就会令贴装头将器件送入抛料盒.
FUJI提供了工业CRT显示器可观察器件的图象通过机器上的现场控制台,可手动操作,获取真实器件的图象,有多种方式可检查器件程序内的封装和实际的差别,CRT能提示哪里出错了(BUG),在出错时屏幕还提供了错误代码,方便于分析产生错误的原因,并提供修改的建议.在视觉软件中,对不同的器件有不同的VISION TYPE,这就是不同的图象处理算法,对不同器件的引脚有不同的灰度解决方案,对引脚有不同的照射顺序,可对引脚树进行验证,对于有极性的器件还可进行极性检测,体现了贴篇机的适应性大小.
SIEMENS80F4也是属于多功能机,她有2组贴片头,分别是旋转头和IC头,前者有12个贴片头组成,最大可以贴装PLCC44,而IC头可以贴装到
55MM855MM的器件.SIEMENS有3个CAMERA,分别是PCB,COMPONENT和IC,PCB主要是用来对照机器上的标志点和PCB上的标志点的.COMPONENT位于旋转头的上方,用来对小器件进行光学对中,调整贴片位置,而IC则主要是对大器件进行光学对中.
SIEMENS有3种主要的照相方式,分别是放块器件(比如一般的CHIP元件)SO器件,BGA.在对CHIP元件进行光学对中时,只有平行光,只对器件的边缘进行确认,从而找到器件的中心,算出贴片机需要调整的误差.而队SO类器件进行光学对中的同时,还要对各个管脚的相对位置进行检测,每一个焊球进行检测,位置和焊球的亮度都是检测内容.SIEMENS叫FUJI在对PLCC进行图象处理有明显的优势,主要原因是FUJI的光源是平行光,对于J型管脚的处理结果就是一样,只对J型管脚的最下端有反射.相比较而言,SIEMENS的光源有侧光,对J型管脚的斜面也有反射图象,能对PLCC进行比较全面的光学检测.SIEMENS在贴装PLCC上也有优势,而且侧光在对BGA进行光学检测时也起着重要的作用.
5,结语
在对FUJI和SIEMENS的视觉系统的比较中,我们更深的认识了贴片机的图象处理技术,可以看出,高精度贴片机综合了计算机,光,电子,自动控制等多种现代高科技技术,随着这些技术日新月异的发展,贴片机会向着更高速,更高精度,更强功能的方向发展.把使用贴片机的心得撰成此文,希望与从事SMT贴片工作的同仁更多的互相交流,达到互相提高的目的.。