轮式装载机工作装置的仿真分析
纯电动轮式装载机动力系统的仿真与研究

《装备制造技术》2018年第03期0前言随着能量消耗的不断增加,特别是空气污染的日趋严重,节能减排已成为当今中国最为迫切解决的问题之一。
工程机械作为大排放机械,技能减排势在必行。
因此,纯电动装载机应运而生。
纯电动装载机是指将动力电池或网电等作为能量源为整机提供动力以驱动整机作业行驶的机型。
目前,纯电动装载机多为单一的蓄电池来提供动力,但是蓄电池作为唯一的动力来源有很多缺陷:①蓄电池对温度比较敏感,给使用着带来诸多不便;②蓄电池的有限循环寿命,增加了使用者更换电源的费用;③废旧电池的环保问题。
超级电容作为新型的能源,它拥有蓄电池所不具备的优点:①有非常高的功率密度;②充电速度快;③循环寿命长,半永久性使用无需更换;④效率高;⑤低温性能优越[1]。
因此将超级电容作为辅助电源与动力电池组成联合体共同工作,组成蓄电池-超级电容的复合系统既可以将蓄电池的高比能量和超级电容的高比功率的优点结合到一起,又可以降低电动车辆对蓄电池大功率放电的限制要求,使系统同时满足动力性、经济性的要求,并对蓄电池起保护作用,大大延长蓄电池循环使用寿命,提高电动汽车的实用性,极有发展前途。
本文的研究为纯电动装载机单一电源和复合电源的比较,为现阶段纯电动装载机的研发提供一定的借鉴,复合电源的纯电动装载机相对于单一电源的纯电动装载机更有价值。
1复合动力系统装载机的结构复合动力系统装载机在动力系统与纯电动装载机有一定的区别,其储能装置是由蓄电池和超级电容联合提供。
超级电容与蓄电池构成的复合电源系统的拓扑结构主要有四种:①超级电容与蓄电池直接并联;②电源复合结构为蓄电池与DC/DC 变换器串联,然后再与超级电容并联;③电源复合结构为超级电容与DC/DC 变换器串联,然后与蓄电池并联;④超级电容、蓄电池均与DC/DC 变换器串联[2]。
综合比较,复合电源结构宜采用图1结构,如图1所示,超级电容与DC/DC 变换器串联后与蓄电池并联,蓄电池直接对外输出功率的方式提高了能量利用效率,超级电容通过DC/DC 变换器跟踪监测蓄电池组端电压,并调节自身电压,该种复合电源系统易于控制。
基于Matlab的轮式装载机工作装置性能分析
.
南 京理 工 大 学 机 械 工 程 学 院 南 京
2 10 0 9 4
)
1
引
言
一
U G7=
a r c c o s
(
轮式 装 载机 是
、
种广泛应 用 于 公路 铁路 建筑 水
、 、
、
半
。
)
;' 山 等 建设 工 程 的 土 石 方 施 工 机 械
、 、 、
。
由 于 其 具 有作 业
。
。 。
一
前车轮轮胎 半径
最 小卸
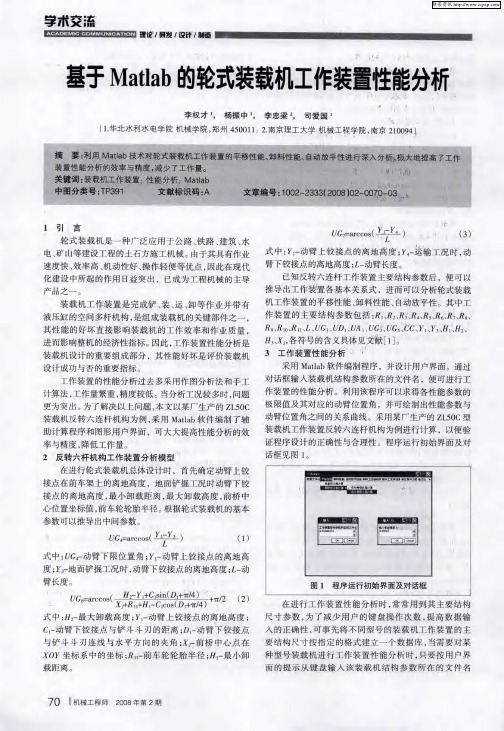
种 型号装载机进行工 作装置 性能分析时 只要按 用 户界
面 的提示 从键 盘 输 人 该 装载机 结 构参数所 在 的文 件 名
载距 离
70
l
机械工 程 师
2008
年第 2 期
维普资讯
字木 交 i 赢
理论 , 发 , 研 设计 , 嗣量
维普资讯
字 木交 ; 赢
理 论 /研 发 , 计 , 造 设 褥
基于 M a t l a b 的轮 装载机工作装置性能分析 式
‘
、
李权 才
.
‘
,
杨振 中
’
,
李 忠梁
;
:
,
司 爱国
,
( 1 华 北 水 利 水 电学 院 机 械 学 院 郑 州
,
4500 11
2
称, 程序便将文件 中的数据 自动调入内存 中进行分析与
计算 。 其 输入 数据 文件 的 的格式 如下 所示 :
RlR2R R4 5R6 8 9 1、 I、 、 、 、 、 、 、 、 【 1 )
UGl U l U 、 、 D 、 A l UG3 UG5 CC 、 、
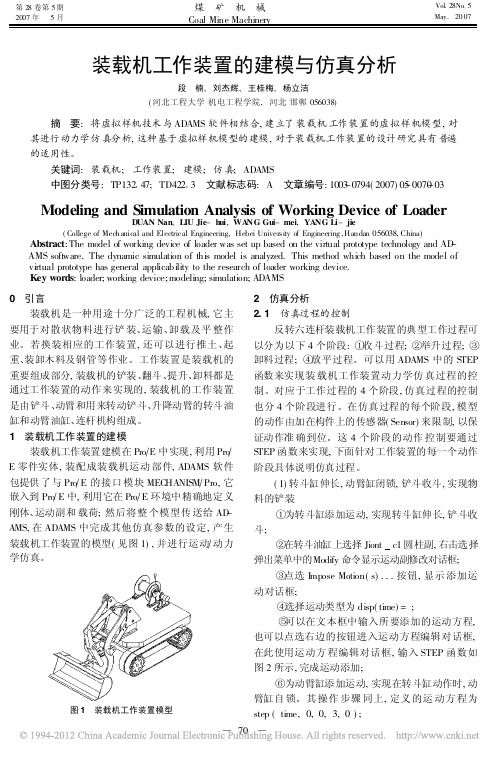
装载机工作装置的建模与仿真分析_段楠
70
第 28 卷第 5 期
装载机工作装置的建模与仿真分析 段 楠, 等
Vol 28No 5
进行 3 s, 步长为 0. 01 s 的动态仿真分析, 此 阶段运行后的模型如图 3 所示。
step( time, 0, 0, 3, 2. 5) + step( time, 3, 0, 7, 0) + step( time, 7. 1, 0, 10, - 4. 5) ;
进行运行时间为 15 s, 步长为 0. 01 s 的仿真 分析, 在第 4 阶段运行后动臂、摇臂、铲斗都回到初 始位置, 其状态如图 6 所示。
图 4 举升状态
( 3) 转斗缸收缩, 动臂缸闭锁, 铲斗翻转, 实现 物料的卸载
为转斗缸添加运动, 使转斗缸伸长, 实现在转 斗的翻转。添加的运动方程为
( 1) 转斗缸伸长, 动臂缸闭锁, 铲斗收斗, 实现物 料的铲装
为转斗缸添加运动, 实现转斗缸伸长, 铲斗收 斗;
在转斗油缸上选择 Jiont c1 圆柱副, 右击选择 弹出菜单中的Modify 命令显示运动副修改对话框;
点选 Impose Motion( s) . . . 按钮, 显示 添加运 动对话框;
缸自锁。添加的运动方程为 step ( t ime, 0, 0, 3, 2.
5) + step ( t ime, 3, 0, 7, 0 ) ; 进行运行时间为 7 s, 步长为 0. 01 s 的仿真分
析, 在第 2 阶段运行后动臂、摇臂、铲斗所处的位置 如图 4 所示。
图 5 卸载状态
( 4) 转斗缸收缩, 动臂缸收缩, 动臂下降, 铲斗 自动放平, 自动进入下一次铲掘状态
紧钢丝绳而使输送带拉紧; 拉力传感器将张紧力的变化传给压力控制器; 压力控制器将压力信号转换为电信
ZL30轮式装载机总体及工作装置设计毕业设计
b.“V”形作业法:运输车与工作面成60度的角度,装载机装满铲斗后,在倒车驶离工作面的过程中,并调转驶向料堆,进入下一次的作业循环。
这种作业方式可以得到较短的工作循环时间,故应用十分广泛。
c.“L”形作业法:运输车垂直于工作面,装载机铲装物料后,倒退并翻转90°,然后向前驶向料堆进行下次铲装。
这种作业方式在运距较短时,一个司机可轮换在两辆运输车上工作,以减少人力。这种作业方式适用宽广的作业场合。
国产装载机型号标记的第一个字母Z,代表装载机,Z后面的数字代表额定装载重量。为了区别履带式和轮胎式装载机,轮胎式装载机型号标记要在字母Z和数字之间加字母L,如ZL30型装载机,代表额定载总量为3t的轮胎式装载机。装载机的型号表示方法见表1-1。
Key words:loader;work device;connecting rod;bucket
前言
装载机是一种作业效率高且用途广泛的工程机械,可以对散状物料进行铲装、搬运、卸载及平整作业,还可以进行轻度的铲掘工作,若更换换装相应的工作装置,还可以可以进行推土、起重装卸木料及钢管等作业。因此,它被广泛应用于建筑、铁路、公路、水电、港口、矿山、农田基本建设及国防等工程。对于加快工程建设速度、减轻劳动强度、提高工程质量、降低工程成本都发挥着重要作用,因此近几年来无论在国内还是在国外装载机品种和产量都得到迅速发展,成为工程机械的重要机种之一。在近20年内,我国装载机从无到有,并形成了独立的系列,通过实践证明,从整机性能结构形式及主要参数如:牵引性、动力性、机动性、稳定性、操纵性、及单位自重功率、单位斗容功率和单位载重量等综合技术指标来看,已接近或达到国外水平。但由于各种原因,产品的质量与先进的工业国家相比还有一定的差距。近期装载机在结构上没有重大的突破,但有不少的改进。目前国内轮式装载机的发展趋势:
装载机工作装置的实体建模和运动仿真

5. 生成特殊连接
分析运动机构
设置运动环境
1. 应用伺服电动机 2. 应用弹簧 3. 应用阻尼器 4. 应用执行电动机 5. 定义力/力矩负荷
1. 运行运动学分析 2. 运行动态分析 3. 运行静态分析 4. 运行力平衡分析
5. 运行重复组件分 析
获取分析结果
1. 回放结果 2. 检查干涉 3. 查看定义的测
几方面的分析:
1 铲斗斗尖位置分析
2 工作装置铰点处运动分析
3 铲斗运动分析
4.5 工作装置干涉检测
在回放中进行碰撞干涉检 测,如果杆件在运动中出现干 涉,“Proe/E” 就会提示,并将 干涉区加亮显示, 以便设计者 检查修改。通过“ Proe/E” 环 境中的全局干涉检查判断ZL50 装载机工作装置干涉问题,经 过检查,ZL50 装载机工作装置 在铲斗收斗时由于收斗角过大 造成后挡板与摇臂产生轻微的 干涉,通过调整翻斗油缸的伸 长长度后,工作装置不存在干 涉情况。最后可以通过扑捉动 态模拟过程,制作成一个动画 影片。
在机构上定义重力、力和力矩、弹簧、阻尼等特征。可以对机构设置材料、
密度等基本属性特征,使其更加接近现实中的机构,达到真实模拟现实的
目的。
做完一个机构动态分析后就可以进行结果回放,检测干涉,捕捉
机构运动仿真动画,所需数据的测量对机构的合理性进行检验,是否满足
设计要求。根据设计任务书的要求,
需要对工作装置做如下
Pro/E提供了十种 连接定义。主要有刚性连 接,销钉连接,滑动杆连 接,圆柱连接,平面连接, 球连接 焊接,轴承,一般, 6DOF(自由度)。
Company Logo
Company Logo
4.3用Pro/E做机械动态分析的一般流程
ZL50轮式装载机虚拟样机建模与仿真探讨

ZL50轮式装载机虚拟样机建模与仿真探讨文章以ZL50轮式装载机为对象,在分析其牵引性能的基础上,通过在ADAMS软件中建立动力学模型,应用现代计算机虚拟仿真技术,形成装载机的虚拟样机系统,然后进行初步的性能仿真试验和参数优化,为装载机的不断完善提供方法和依据。
通过文章的探讨,以期对相关人员的工作提供参考。
标签:轮式装载机;动力学系统;虚拟分析引言轮式装载机是一种通过安装在前端一个完整的铲斗支承结构和连杆,随机器向前运动进行装载或挖掘,以及提升、运输和卸载的轮胎机械,广泛用于公路、建筑、矿山等工程领域,对于减轻劳动强度,加快工程建设速度,提高工程质量起着重要的作用。
虚拟样机技术作为一种技术手段,在汽车工业里面被普遍采用,通过相应系统进行仿真,可以达到评价汽车操作稳定性和耐久性的目的。
轮式装载机属于循环式作业机械,对其研究目前仍存在不足之处,通过虚拟样机技术来对轮式装载机进行性能仿真试验和参数优化,不失为一种解决问题的方法。
文章主要针对ZL50轮式装载机作为研究对象进行建模与分析,其具体参数如表1所示。
1 ZL50轮式装载机动力学建模由于ZL50轮式装载机是一个非常复杂的多体系统,因此通过建立装载机模型的方式研究各个系统综合性能是一种有效的方法。
虚拟样机在构造上是与实际装载机动力学行为相似的等价模型,该等价模型在物理性能上等同或十分相似于实际系统,但比实际的装载机更简单和便于分析研究。
目前机械系统动力学仿真分析软件较多,基于ADAMS能有效地分析三维机构的运动与力,可模拟大位移的系统和能够分析运动学静定系统,故采用ADAMS来对ZL50轮式装载机进行动力学建模与分析。
以下是在ADAMS操作环境下建立的动力学模型。
2 ZL50轮式装载机动力学仿真纵向稳定度是评价装载机技术性能的重要指标之一,它表明装载机在行驶或工作时抵抗翻车的能力。
ZL50轮式装载机主要在满载上坡动臂伸出最大或满载下坡行驶时或空载上坡运行时容易产生倾翻。
装载机工作装置建模与动态分析机械工程和自动化专业

装载机工作装置建模与动态分析摘要现如今,在各种类型的工程机械中,应用尤为广泛的即为装载机,其将可有效提高现有的工程进度,并尽可能降低不必要的劳动强度,持续优化当前的工程质量。
本次研究用Z30E型装载机作为研究对象,使用solidworks三维建模软件创建了装载机工作装置各构件的零件图并用自带的装配功能将各构件装配成完整的工作装置。
在此之后,本文借助于ANSYS有限元分析软件的作用,对装载机的动臂进行科学合理的有限元分析。
在本篇论文中,决定将研究对象设定为Z30E装载机,并对其所应满足的设计要求,进行较为深入的细致阐述。
其次,据此成功构建出相匹配的反转六杆机构模型,并由此针对装载机铲斗以及摇臂等部分,进行科学得当的受力分析。
最后,本文主要针对动臂以及连杆等构件,进行精准有效的强度校核。
用solidworks创建工作装置的三维模型时先简单介绍了三维机械设计软件solidworks。
之后用solidworks的简单功能创建了装载机工作装置主要构件铲斗、动臂、摇臂和连杆的三维模型,并使用装配功能将各构件装配成一个统一的工作装置整体。
以动臂为例,若其达到高度的极小值,则将可进行一系列有限元分析。
此时,仅需将动臂模型融于ANSYS软件中,并在ANSYS中划分网格,再向其赋予一定的载荷,即可针对模型进行科学精准的求解和细致分析,并由此获得应力云图以及相应的位移云图。
据此将可得知,应力的极大值将可达到174MPa,在动臂与举臂油缸铰接处,位移最大值为0.00701m,在动臂的横梁中部处。
在本篇论文中,主要针对装载机所涉及的多样化构件,进行科学合理的受力分析,再据此成功构建出相匹配的三维模型,此外还针对动臂构件进行必要的有限元分析,并由此找出动臂应力值最大的点,对工作装置的优化设计,改善性能等将会有很大帮助。
而且利用计算机可以直接显示出动臂的彩色应力云图和位移云图。
这样复杂的装载机空间应力问题就迎刃而解了。
关键词:装载机;工作装置;建模;有限元分析第1章绪论1.1轮式装载机简介装载机隶属于典型的铲土运输机械装置,这种设备的前端配置了铲斗支撑件以及相应的连杆,相关的随机装置能够前向运动,并能进行多种作业,譬如上提、挖掘、装载、卸载与运输等,其在建筑以及矿山等各种类型的工程建设领域中应用较为广泛。
ZL50轮式装载机工作装置建模及仿真分析
目录摘要 (I)ABSTRACT (II)第一章绪论 (1)1.1 装载机简介 (1)1.2 设计内容 (1)1.3 装载机发展概况 (2)第二章装载机总体设计 (3)2.1 装载机总体参数的确定 (3)2.2 装载机的插入阻力与掘起阻力的确定 (4)第三章装载机工作装设置计 (6)3.1 工作装置的设计要求 (6)3.1.1概述 (6)3.1.2轮式装载机工作过程 (7)3.1.3 轮式装载机工作装置设计要求 (7)3.2 铲斗设计 (8)3.2.1铲斗的结构形式 (8)3.2.2铲斗的分类 (9)3.2.3铲斗的设计要求 (9)3.2.4铲斗设计 (9)3.3 动臂设计 (14)3.3.1对动臂的设计要求 (14)3.3.2 动臂铰点位置的确定 (14)3.3.3动臂长度D l的确定 (16)3.3.4动臂结构和形状的确定 (17)3.4 连杆机构的设计 (18)3.4.1工作装置连杆机构的类型 (18)3.4.2连杆机构的设计要求 (20)3.4.3连杆机构尺寸参数设计及铰点位置确定 (21)第四章工作装置受力分析及强度计算 (26)4.1 确定计算位置及典型工况 (26)4.1.1计算位置的确定 (26)4.1.2典型工况选取和外载荷的计算 (26)4.2 工作装置受力分析 (27)4.2.1对称载荷工况 (27)4.2.2偏载工况 (30)4.3 工作装置强度校核 (31)4.3.1动臂 (31)4.3.2铰销强度的校核 (32)第五章工作装置的建模及仿真分析 (34)5.1 工作装置建模 (34)5.1.1在Pro/E中建立铲斗 (34)5.1.2启动ADAMS/View 程序 (35)5.1.2检查和设置建模基本环境 (35)5.1.3 Pro/E铲斗模型导入ADAMS (35)5.1.4工作装置的几何建模 (36)5.1.5 创建约束及施加运动和载荷 (38)5.2初步仿真分析该模型的性能参数 (41)5.2.1铲斗后倾角及卸载角的测量 (41)5.2.2分析 (43)第六章结论 (44)参考文献 (45)致谢 (46)装载机是一种用途较广的铲运、施工机械。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
S m u a i n a l ss o i l to na y i fwhe ll a r wo k ng de i e e o de r i v c
t e smu ai n a ay i ,h a a tr ft e w r i g d v c s mo i e n h o ai n o h ig o n r e e ,t e h i lt n l ss t e p r me e s o h o k n e i e i o d f d a d t e lc t ft e h n e p i ta e r s t h i o me h ns p r mee s a d h n e p i t o ain ae g t h c a e h e in o t z t n r q i me t ,a d t e f e a k c a im a a tr n ig o n c t o ih c n me tt ed s p i ai e u r l o r w g mi o e n s n h u l n t
Ab t a t h sa l h n fs - a c a im o h h e o d rwok n e i e i d l d b D mo e ig s f r s r c :T e e t bi me to i b r me h n s ft e w e ll a e r i g d vc s mo ee y 3 d l o t e s x n wa UG,t e s lt n a ay i o o k n e i ei s d mu t- o y d n mi sa ay i s f r AMS h i ai n lss fw r ig d v c su e l b d y a c n lss ot e AD mu o i wa .B sn h e u t f y u i gt e r s l o s
不足 , 步更 改 , 且 还 可 通过 参 数 化 模 型 进 行 工 作 逐 而
1 引 言
轮式 装载机 是 目前工 程 机械 中发 展较 快 , 市场需
不需 要 绘制 , 只要 保 证 工 作装 置在 形 式 上 相 连 , 要 主 是 为 了避免 在多 体动 力学 模 型 中零 部件 过多 , 部件 零 之 间 的约束 关 系不 易确定 , 了在 多体 动力 学模 型 中 为 实 现操 作方便 以及便 于实 现 参 数 化模 型在 此可 以简
o e moi n c n r l a a tr , h c a r v d ee e c o e la e r i g d v c ra. ft t o to rmee s w ih c n p o i e a r fr n ef rt o d rwo k n e i e t 1 h o p h i Ke r s o d r wok n e i e smu ai n a ay i y wo d :l a e ; r i g d vc ; i l t n l ss o
摘
要: 利用三维造型软件 U G建立轮 式装载机 工作装置 的六连杆机构 , 通过 多体动 力学分析软件 A A D MS实现虚拟
仿真 , 通过仿 真分析的结果对3 作装置机 构参数修 改以及铰接 点位 置的 重新设 定, 出符合 设计优化 要 求的 - 得
机构参数和铰接点位置 , 以及油缸运动控制参数 。为装载机工作装置的试制提供参考数据 。
化 连接 销 。
求较大的工程机械装备 , 前应用较多的是六连杆机 目 构 , 次设 计采 用 的 是反 转 六 连 杆 机 构 , 其 举 升 性 本 对 能进行 优 化设计 。传统设 计 采用试 制 , 品制 造试 验 产
周 期 长 , 验成 本 高 。 目前虚 拟样 机技 术应 用 于装 载 试
・
机 械 研 究 与 应 用 ・ 0 年 期( 第1 期 2 2 第5 总 2 ) 1 1
设ቤተ መጻሕፍቲ ባይዱ与制造
轮 式装 载 机 工 作 装 置 的 仿 真 分 析
吴 丹 , 玉 杰 I纪 -
( . 阳理 工 大 学 机 械 学 院 , 宁 沈 阳 105 2 沈 阳 交通 工程 学校 , 宁 沈 阳 10 2 ) 1沈 辽 1 19; . 辽 10 6
机工作 装 置 的设 计 与优 化 , 短产 品研 制周 期 以及试 缩
验成本 , 而且操 作 实 现 方 便 。采 用 虚 拟 样 机 技术 , 利 用三 维建 模 软件 对 工 作 装 置 进行 建 模 , 过 A A 通 D MS
中的 三 维 接 口转 化 为 A A D MS的 分 析 模 型 , 过 对 通 AA D MS中的工 作装 置进 行 仿 真 分 析 , 出设 计 中的 找
W u Da ,J Yu i n i —i e
( . h n a g L o g u i r t ,h n a g La nn l 0 5 , hn ; 1 S ey n i  ̄ nv sy S ey n i i g ei o g 1 19 C i a
2 S ey n a c n i e n ho,hn agLann 10 2 ,hn ) .hna gtf gn r gs olS eyn io i rf e e i c i g 10 6 C i a