计算机监控原理及技术6-7
【精品】计算机

7.在浮点加法运算中,完整的操作步骤是对阶。尾数相加、结果规格化、舍入、溢出检查。
8.定点运算器中一般包括ALU、寄存器、对路选择器、移位器和数据通路。
9.ALU的基本逻辑结构是快速进位加法器,它比行波进位加法器优越,具有先行进位逻辑,不仅可以实现高速运算,还能完成逻辑运算。
10.浮点运算器由阶码运算器和尾数运算器组成,它们都是定点运算器,尾数运算器要求能进行加、减、乘、除运算。
18.一条机器指令由一段微指令构成的微程序来解释执行;微指令可由一系列微命令组成。
19.控制部件通过控制线向执行部件发出各种控制命令,通常把这种控制命令叫做微命令。而执行部件接受此控制命令后进行的操作叫做微操作。
20.一条微指令可划分为微命令字段和控制字段;微指令的基本格式可分为水平型和垂直型。
12.虚拟存储器管理的基本方法有页式、段式和段页式三种。
13.在虚拟存储器中,一般采用全相联地址映像方法和LRU更新策略。
14.虚拟存储器中,程序正在执行时,由操作系统完成地址映像。
15.在磁表面存储器中,调频制(FM)记录方式目前主要用于单密度磁盘存储器,改进调频制(MFM)记录方式主要用于双密度磁盘存储器,而在磁带存储器中一般采用调相制(PE)和成组编码(GCR)记录方式。
21.由于数据通路之间的结构关系,微操作可分为相容性和相斥性两种;
在同一微周期中不可能同时出现的微命令,称之为互斥的微命令。
在同一微周期中可以同时出现的微命令,称之为相容的微命令。
22.在微指令的字段编码中,操作控制字段的分段必须遵循的原则包括:
把互斥性的微命令分在同一段内。
一般每个小段要留出一个状态0,表示不操作。
1.-1的补码定点整数表示时为1...1,用定点小数表示时为1...0。
微型计算机原理及应用技术

0000
0
9
0001
1
10
0010
2
11
0011
3
12
0100
4
13
0101
5
14
0110
6
15
0111
7
16
1000
8
17
二进制
1001 1010 1011
1100 1101 1110 1111 10000 10001
16进制
9 A B
C D E F 10 11
4. 各种数制之间的转换 【例1-1】 十进制数22.625转换为二进制数
②小数部分转换,每次把乘积的整数取走作为转换结果的一位,对 剩下的小数继续进行乘法运算。对某些数可以乘到积的小数为0(如 上述两例),这种转换结果是精确的;对某些数(如0.3)永远不能 乘到积的小数为0,这时要根据精度要求,取适当的结果位数即可, 这种转换结果是不精确的。
例如 :十六进制数
1
A
E
4
虽然BCD码是用二进制编码方式表示的,但它与二进制之间不 能直接转换,要用十进制作为中间桥梁,即先将BCD码转换为 十进制数,然后再转换为二进制数;反之亦然。
十进制 0 1 2 3 4 5
表1-2 BCD编码表
8421BCD码
十进制
0000
6
0001
7
0010
8
0011Leabharlann 9010010
0101
11
8421BCD码 0110 0111 1000 1001
1.3.1 计算机的硬件系统 1.3.2 计算机的软件系统 1.3.3 计算机的主要技术指标
1.1 引言 1.1.1 计算机发展概况
计算机网络(谢希仁)答案 第6-7章 广域网

第六章广域网6-01 试从多方面比较虚电路和数据报这两种服务的优缺点答:答:(1)在传输方式上,虚电路服务在源、目的主机通信之前,应先建立一条虚电路,然后才能进行通信,通信结束应将虚电路拆除。
而数据报服务,网络层从运输层接收报文,将其装上报头(源、目的地址等信息)后,作为一个独立的信息单位传送,不需建立和释放连接,目标结点收到数据后也不需发送确认,因而是一种开销较小的通信方式。
但发方不能确切地知道对方是否准备好接收,是否正在忙碌,因而数据报服务的可靠性不是很高。
(2)关于全网地址:虚电路服务仅在源主机发出呼叫分组中需要填上源和目的主机的全网地址,在数据传输阶段,都只需填上虚电路号。
而数据报服务,由于每个数据报都单独传送,因此,在每个数据报中都必须具有源和目的主机的全网地址,以便网络结点根据所带地址向目的主机转发,这对频繁的人—机交互通信每次都附上源、目的主机的全网地址不仅累赘,也降低了信道利用率。
(3)关于路由选择:虚电路服务沿途各结点只在呼叫请求分组在网中传输时,进行路径选择,以后便不需要了。
可是在数据报服务时,每个数据每经过一个网络结点都要进行一次路由选择。
当有一个很长的报文需要传输时,必须先把它分成若干个具有定长的分组,若采用数据报服务,势必增加网络开销。
(4)关于分组顺序:对虚电路服务,由于从源主机发出的所有分组都是通过事先建立好的一条虚电路进行传输,所以能保证分组按发送顺序到达目的主机。
但是,当把一份长报文分成若干个短的数据报时,由于它们被独立传送,可能各自通过不同的路径到达目的主机,因而数据报服务不能保证这些数据报按序列到达目的主机。
(5)可靠性与适应性:虚电路服务在通信之前双方已进行过连接,而且每发完一定数量的分组后,对方也都给予确认,故虚电路服务比数据报服务的可靠性高。
但是,当传输途中的某个结点或链路发生故障时,数据报服务可以绕开这些故障地区,而另选其他路径,把数据传至目的地,而虚电路服务则必须重新建立虚电路才能进行通信。
实验七 网络嗅探

实验七网络嗅探【实验目的】1.了解FTP、HTTP等协议明文传输的特性;2.了解局域网内的监听手段;3.掌握Ethereal嗅探器软件的使用方法;4.掌握对嗅探到的数据包进行分析的基本方法,并能够对嗅探到的数据包进行网络状况的判断。
【实验环境】两台以上装有Windows 2000/XP/2003操作系统的计算机。
【实验原理】(1)嗅探原理网络监听是一种常用的被动式网络攻击方法,能帮助入侵者轻易获得用其他方法很难获得的信息,包括用户口令、账号、敏感数据、IP地址、路由信息、TCP套接字号等。
管理员使用网络监听工具可以监视网络的状态、数据流动情况以及网络上传输的信息。
嗅探器(Sniffer)是利用计算机的网络接口截获发往其他计算机的数据报文的一种技术。
它工作在网络的底层,将网络传输的全部数据记录下来。
嗅探器可以帮助网络管理员查找网络漏洞和检测网络性能。
嗅探器可以分析网络的流量,以便找出所关心的网络中潜在的问题。
不同传输介质网络的可监听性是不同的。
一般来说,以太网(共享式网络)被监听的可能性比较高,因为以太网(共享式网络)是一个广播型的网络。
微波和无线网被监听的可能性同样比较高,因为无线电本身是一个广播型的传输媒介,弥散在空中的无线电信号可以被很轻易地截获。
在以太网中,嗅探器通过将以太网卡设置成混杂模式来捕获数据。
因为以太网协议工作方式是将要发送的数据包发往连接在一起的所有主机,包中包含着应该接收数据包主机的正确地址,只有与数据包中目标地址一致的那台主机才能接收。
但是,当主机工作在监听模式下,无论数据包中的目标地址是什么,主机都将接收(当然自己只能监听经过自己网络接口的那些包)。
在Internet上有很多使用以太网协议的局域网,许多主机通过电缆、集线器连在一起,当同一网络中的两台主机通信的时候,源主机将写有目的主机地址的数据包直接发向目的主机。
但这种数据包不能在IP层直接发送,必须从TCP/IP协议的IP层交给网络接口,也就是数据链路层,而网络接口是不会识别IP地址的,因此在网络接口数据包又增加了一部分以太帧头的信息。
水电站计算机监控系统的基本技术

,第二篇水电站计算机监控系统的基本技术任务一、水电站计算机监控系统的工作原理子任务一、电站主控层的计算机监控原理电站主控层(主要由上位机组成),介于电网层与现地控制层之间,是操作员监控运行过程的主要窗口,负责对控制过程的“控、监、传”。
其“控”,就是将“人”的操作信息送入控制系统,实现运行状态的转换,其“监”,就是对系统的数据库进行管理,进而实现信息处理和送达,其“传”,就是在电网层与现地控制层之间实现信息的传递。
在水电站主控层安装有水电站计算机监控系统的历史数据库、实时数据库、历史数据库管理系统、实时数据库管理系统、上位机软件系统和人机接口界面等。
现地控制单元层的数据首先采集进入实时数据库,一方面,上位机软件根据设定的时间,通过实时数据库管理系统定时访问实时数据库的数据,并定时刷新人机接口界面,这样便于操作运行人员了解整个电站的运行情况;另一方面,实时数据库的数据定时存储入历史数据库,历史数据库可以由历史数据库管理系统进行管理,操作运行人员可以一次通过人机接口界面、上位机软件和历史数据库管理平台对历史数据进行管理、修改和查询等操作。
此外,实时数据库可以通过上位机中的远程通讯软件与电网层进行数据交换。
主控层原理见(图2-1)。
图2-1 电站主控层的工作原理简图子任务二、现地控制单元层计算机监控原理水电站计算机监控系统的现地控制单元主要包括机组现地控制单元和开关站及公用设备现地控制单元。
其中,机组现地控制单元主要在现场对机组运行实现监视和控制。
它需要直接与水电站的生产过程接口,对发电机生产过程进行监控,运行中要实现数据采集、处理和设备运行监视,同时通过局域网与监控系统其他设备进行通信,以及完成自诊断等。
同时,它要协调功能层设备如调速器、励磁装置、同期装置、备自投装置等与现地控制单元的的联动以完成调速、调压、调频以及事故处理等快速控制的任务。
在上位机系统出现故障或退出运行时,现地LCU应能够正常运行和实现对水轮发电机组发电的基本控制。
水电站计算机监控技术(第6章)
第六章 自动发电控制和自动电压控制第一节 自动发电控制一、水电厂自动发电控制的任务自动发电控制(Automatic Generation Control,简称AGC)的任务是:在满足安全发电的各项限制条件下,以迅速的、经济的方式控制整个电厂的有功功率以满足系统的需要。
AGC是随着以计算机为基础的水电厂自动化系统的发展和应用从生产实际中提出来的。
电力系统的正常运行,功率平衡是必要条件,但在实际运行中,由于用户的投人和退出,或电站、线路故障等一类扰动,系统的平衡遇到破坏,使得频率、电压运行指标偏离额定值,形成指标偏差。
这种偏差必须迅速的消除,否则会危及系统的正常运行,造成极大的损失。
消去指标偏差的重要措施就是调整系统的有功功率和无功功率。
严格地说,有功功率的调整与无功功率的调整是紧密相关的,但相应对系统影响的灵敏度分析表明:有功功率的不平衡主要影响系统的频率,基本上不影响系统母线电压:无功功率的不平衡主要影响系统母线电压,基本上不影响系统频率。
因此,通常把有功功率控制与无功功率控制分成两个相对独立的问题来对待,这在分析系统小波动情况下是合适的。
我们研究的问题是基于稳态下指标偏差的调节,因此采用上述独立的假定。
这样,把对有功功率的调节以维持系统的频率、和对无功功率的调节以维持系统母线电压作为两个单独的问题进行讨论。
美国电气和电子工程师协会(IEEE)给出只考虑频率因素对AGC的定义:“自动发电控制即为系统频率、输电线负荷或它们之间关系的变化对某一规定地区内发电机有功出力所进行的调节,以维持计划的系统频率和或跟其它地区商定的交换功率在一定的限值内”。
简述之即为有功功率和频率的调整。
根据上面对AGC的理解,它包括两个方面的含意:一是形成地区控制误差;二是地区控制误差的分配过程。
根据我们国家水电厂运行的实际情况,地区控制误差一般是由网局给电站的计划负荷或根据系统调频要求而给电厂的随机负荷。
因此。
对一个电站为规定地区来说,其地区控制误差一般为指令性的,不是由电站自动形成的。
计算机组成原理实验报告(四个实验 图)
福建农林大学计算机与信息学院计算机类实验报告课程名称:计算机组成原理姓名:周孙彬系:计算机专业:计算机科学与技术年级:2012级学号:3126010050指导教师:张旭玲职称:讲师2014年06 月22日实验项目列表序号实验项目名称成绩指导教师1 算术逻辑运算单元实验张旭玲2 存储器和总线实验张旭玲3 微程序控制单元实验张旭玲4 指令部件模块实验张旭玲福建农林大学计算机与信息学院信息工程类实验报告系:计算机专业:计算机科学与技术年级: 2012级姓名:周孙彬学号: 3126010050 实验课程:实验室号:_______ 实验设备号:实验时间:指导教师签字:成绩:实验一算术逻辑运算单元实验实验目的1、掌握简单运算器的数据传输方式2、掌握74LS181的功能和应用实验要求完成不带进位位算术、逻辑运算实验。
按照实验步骤完成实验项目,了解算术逻辑运算单元的运行过程。
实验说明1、ALU单元实验构成(如图2-1-1)1、运算器由2片74LS181构成8位字长的ALU单元。
2、2片74LS374作为2个数据锁存器(DR1、DR2),8芯插座ALU-IN作为数据输入端,可通过短8芯扁平电缆,把数据输入端连接到数据总线上。
运算器的数据输出由一片74LS244(输出缓冲器)来控制,8芯插座ALU-OUT 作为数据输出端,可通过短8芯扁平电缆把数据输出端连接到数据总线上。
图2-1-1图2-1-22、ALU单元的工作原理(如图2-1-2)数据输入锁存器DR1的EDR1为低电平,并且D1CK有上升沿时,把来自数据总线的数据打入锁存器DR1。
同样使EDR2为低电平、D2CK有上升沿时把数据总线上的数据打入数据锁存器DR2。
算术逻辑运算单元的核心是由2片74LS181组成,它可以进行2个8位二进制数的算术逻辑运算,74LS181的各种工作方式可通过设置其控制信号来实现(S0、S1、S2、S3、M、CN)。
当实验者正确设置了74LS181的各个控制信号,74LS181会运算数据锁存器DR1、DR2内的数据。
(完整版)计算机控制技术第二章习题答案整理及详解(.04.26修改版SK)
be i ng 第2章 习题参考答案1.什么是接口、接口技术和过程通道?答:接口是计算机与外设交换信息的桥梁,包括输入接口和输出接口。
接口技术是研究计算机与外部设备之间如何减缓信息的技术。
过程通道是计算机与生产过程之间的信息传送和转换的连接通道。
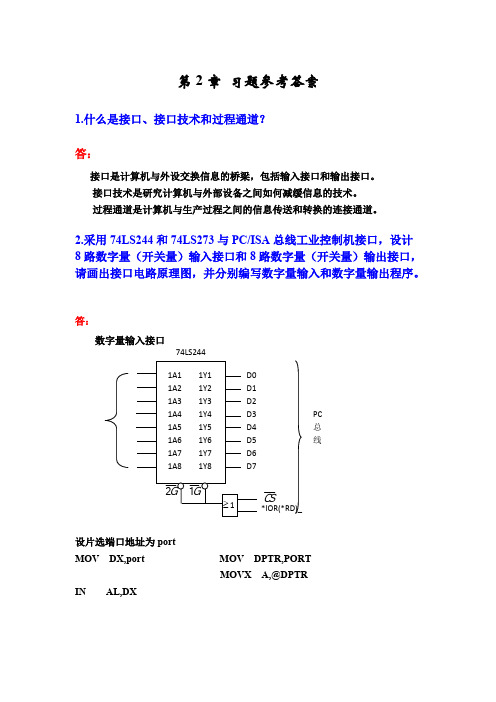
2.采用74LS244和74LS273与PC/ISA 总线工业控制机接口,设计8路数字量(开关量)输入接口和8路数字量(开关量)输出接口,请画出接口电路原理图,并分别编写数字量输入和数字量输出程序。
答:数字量输入接口设片选端口地址为port MOV DX,portMOV DPTR,PORTMOVX A,@DPTRINAL,DX74LS244PC 总线*IOR(*RD)_数字量输出接口MOV AL,DATA MOV A,DATAMOV DX ,port MOV DPTR,PORT OUTDX,ALMOVX @DPTR,A3.用8位A/D 转换器ADC0809与8051单片机实现8路模拟量采集。
请画出接口原理图,并设计出8路模拟量的数据采集程序。
输出信号PC 总线(*WR)程序:ORG 0000HMOV R0,#30H ;数据区起始地址存在R0MOV R6,#08H ;通道数送R6MOV IE,#84H ;开中断SETB IT1 ;外中断请求信号为下跳沿触发方式MOV R1,#0F0H ;送端口地址到R1NEXT:MOVX @R1,A ;启动A/D转换LOOP:SJMP LOOPINC R0INC R1DJNZ R6,NEXT ;8路采样未接受,则转NEXTCLR EX1 ;8路采样结束,关中断END中断服务程序:ORG 0003H ;外中断1的入口地址AJMP 1000H ;转中断服务程序入口地址ORG 1000HMOVX A,@R1 ;读入A/D转换数据MOV @R0,A ;将转换的数据存入数据区RETI ;中断返回ORG 0000HMOV R1,#30HMOV R2,#0F0HA1: MOV DPTR, R2MOVX @DPTR, ALOOP: JNB P3.2 , LOOPMOVX A, @DPTRMOV @R1,AINC R2INC R1CJNE R2, 0F7H, A1END4.用12位A/D 转换器AD574与PC/ISA 总线工业控制机接口,实现模拟量采集。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• •
6.2 Honeywell公司的集散控制系统 6.2.1 系统结构
图6.3 TPS系统结构
• 6.2.2 技术特点 • 整个TPS主要由两大部分组成:一部分是通 信系统和有关通信部件,另一部分是分散 过程控制装置。 • 6.3 Foxboro公司的I/A'S • 6.3.1 系统结构 • (1)第一层为宽带 • 宽带基本技术特点为: • 通信规程:IEEE802.4(MAP) • 拓扑结构:总线 • 介质访问控制:Token Passing
• • • • • • •
(4)第四层为现场总线 现场总线基本技术特点为: 通信规程:IEEE1118 拓扑结构:总线 介质访问控制:CSMA/CD 数据传输速率:268kbit/s 通 信 介 质 : 双 绞 线 10m , 采 用 扩 展 组 件 1 200m/每次,可扩展多次 • 最大距离:可达1 800km • 本地方式可下挂 24 个组件,远方方式最多 可达到64个组件
• • • • • • • •
载波带可下挂64个节点总线 (3)第三层为节点总线 节点总线基本技术特点为: 通信规程:IEEE802.3(Ethernet) 拓扑结构:总线 介质访问控制:CSMA/CD 数据传输速率:10Mbit/s 通信介质:同轴电缆 30m ,采用扩展组件 300m/每次,可扩展二次 • 节点总线可下挂64个站组件
图6.4 I/A series 的网络结构
• • • • • • • • • •
数据传输速率:10Mbit/s 通信介质:同轴电缆或光缆(15km) 宽带网络可下挂64个载波带。 (2)第二层为载波带 载波带基本技术特点为: 通信规程:IEEE802.4(MAP) 拓扑结构:总线 介质访问控制:Token Passing 数据传输速率:5Mbit/s 通信介质:同轴电缆(1.2km)、光缆(10km)
• 第6章 基于网络的计算机监控系统
• 6.1 集散控制系统概述 • 6.1.1 集散控制系统 • 集 散 控 制 系 统 的 英 文 名 称 为 Distributed Control System,简称DCS, 又称分散控制 系统。 • ①随着生产过程规模不断地扩大,使得中 央控制室的仪表数量越来越多。 • ②大规模的生产过程对可靠性也提出了更 高的要求。
• ⅡRISC32位、CPU;16~48M,RAM;可配 备软驱、硬盘、磁带机、CDROM接口。过 程显示画面可从本地硬盘读出,也可从逻 辑上位机AP中读出。 • CP10 的 系 统 配 置 为 : 8086+8087 、 CPU ; 896kB 、 RAM 。每个 CP10 最多带 48 块 FBM , 最快扫描周期:0.1秒,每秒最多处理300个 控制功能模块。 • CP30的系统配置为:80386+80387、CPU; 4M 、 RAM 。每个 CP30 最多带 64 块 FBM , 最快扫描周期:0.1秒,每秒最多处理1 000
• 组态软件,该软件运行在工程师站上。 • (3)现场控制站 • 现场控制站是完成现场信号的 I/O 处理和实 现直接数字控制的网络节点,主要功能有: • ①采集现场的过程参量 ( 如电压、液位、流 量、温度、压力、速度等 ) ,并将其转换为 数字量。 • ②将采集到的实时数据通过网络传送至工程 师站、操作员站或其他的现场控制站以及接 受工程师站和操作员站下传的指令以完成监 控任务。 • ③运行工程师站下装的控制程序。
• 6.3.2 技术特点 • AP的功能包括:系统和网络管理、数据 库管理、文件请求、历史数据控制 ( 不直接 进行过程的输入输出处理 ) 、图形显示支持、 生产控制、组态、应用开发、诊断。 • 常 用 的 AP51 其 系 统 配 置 为 : Micro SPARCⅡRISC32 位 、 CUP ; 16~256M 、 RAM;可配备软驱、CDROM、磁带机以及 最多达4个硬盘;可选的接口有串口、SCSI 接口、 Ethernet 接口、节点总线接口。一台 AP51最多可支持16个WP和30个CP。 • 常用的WP51其系统配置为:Micro SPARC
• ③模拟电动仪表与现场被测控的物理参量 之间都是一对一的连线,对于大型的控制 系统,测控参量往往多达数千个甚至数万 个,众多的导线首先会使中央控制室中的 接线柜的数量大大增加,使得整个控制系 统体积庞大、重量重和成本高。 • ④现代化的管理要求能够迅速地获取现场 的各种数据,并且将这些数据保存下来, 形成各种报表,并对其进行分析,这些都 是模拟电动仪表难以实现的。
在CRT上主要有以下几部分内容输出: 1) 生产过程的模拟流程图 2) 报警窗口 3) 实时趋势曲线 4) 关键参数或设备的操作窗口 5) 关键参数的常驻显示 6) 检测及控制仪表的模拟显示 (2)工程师站 工程师站的作用是对集散控制系统进行离 线的组态和在线的组态、监督、控制和维 护。集散控制系统的开发商都会提供一套
• ⑤虽然当时计算机已经开始在工业控制中 应用,其所具有的数字化控制算法使得系 统的控制相对变得方便,但当时所使用的 计算机多为大型计算机,采用集中控制的 方式。
图6.1 集散控制系统示意图之一
• 6.1.2 集散控制系统的特点与基本构成 • 集散控制系统的特点可以归纳为:管理、 操作集中;控制、检测分散。 • 如果从另一个角度来看集散控制系统,可 以将其结构归纳为“三点一线”。所谓 “一线”,是指集散控制系统的主干计算 机网络;“三点”则是指连接在网络上的 三种不同类型的节点。这三种节点是:面 向被控过程现场的现场I/O控制站(或简称现 场控制站 ) ;面向操作人员的操作员站;面 向集散控制系统开发和管理人员的工程师 站。
图6.2 集散控制系统示意图之二
• (1)操作员站 • 操作员站是具有处理一切与操作运行有关 的人机界面功能的网络节点,其主要功能 是为系统的运行操作人员提供人机界面, 使操作人员可以通过操作员站及时地了解 现场的运行状况、各种运行参数的当前值、 是否有异常情况发生等。
• • • • • • • • •