机轮刹车系统的控制与仿真技术
汽车轮胎动力学仿真研究
汽车轮胎动力学仿真研究近年来,随着科学技术的发展和汽车工业的迅速发展,汽车轮胎动力学仿真已经成为大多数厂商和研究机构必不可少的工具。
它可以单独用于轮胎和路面的模拟,也可以整车仿真用于底盘动态模拟。
一、轮胎动力学模型汽车轮胎动力学仿真中最基础的问题是如何建立轮胎模型。
轮胎的复杂性在于不同车辆型号下的轮胎的材料和结构状态都是不同的。
其中,轮胎悬挂系统和车身是不可缺少的模型结构。
轮胎模型通常采用骨架模型和三维流体模型,通过基本的力学原理来描述轮胎变形、刚度等行为。
在实际仿真分析中,轮胎的动态行为还涉及到了其多阶段非线性问题和较大的形变问题。
通过比较多组测试数据,可以得出比较准确的模型,并通过优化算法来提高模型的准确性,从而达到更好的仿真效果。
二、路面数据库路面数据库是一组路面纹理、形状、材料和性质的数据。
这种数据在轮胎动力学仿真中非常重要,它模拟了轮胎和路面之间的相互作用,以及轮胎受到的摩擦和地形清洗作用。
路面数据库通常包括四个主要部分:三维路面纹理数据库、几何路面数据库、材料数据库和边界数据库。
三维路面纹理数据库包含了路面标志、标记和障碍物等特征的三维模型,几何数据库存储路面高度和曲率相关信息,材料数据库包括一系列材料参数信息,例如通过在测试平台上获取的摩擦系数,还有用于描述边界条件的数据库。
三、整车仿真此外,在汽车轮胎动力学仿真中,整车仿真是一个重要的应用领域。
整车仿真是在条件控制和模拟下对车辆进行各种工作状态和外部环境下的评估和优化。
整车仿真系统的直接驱动来自于轮胎模型,而轮胎受力和弯曲变形与其与地面的接触情况密切相关。
整车仿真可以评估车辆性能如刹车距离、加速度和经济性等方面,并可进行优化。
四、应用领域汽车轮胎动力学仿真系统已经在诸多领域得到广泛应用。
在轮胎工业中,汽车轮胎动力学仿真可以通过优化轮胎的刚度和几何形状、材料性质和胶粘性排布等参数,从而减少制造过程中的实验和错误。
此外,汽车轮胎动力学仿真对于车辆安全和性能的评估、开发和测试非常重要,在汽车产业中,它也可以被用于技术改进。
控制系统建模设计与仿真概述

二、控制系统的建模方法
• 数学建模过程
坐标系定义
• 直角坐标系
直线运动——力,线加速度、线速度和位移 旋转运动——力矩,角加速度、角速度和角度
• 坐标系变换
地理坐标系 车体坐标系 传感器坐标系
余弦矩阵 四元素
俯仰->偏航->滚动
二、控制系统的建模方法
• 数学建模过程
被控对象 • 模型结构已知,通过测力等试验获取模型参数,得到 非线性耦合模型 • 例如,汽车轮胎滑移特性试验、飞机风洞试验等
• 建立数学模型的原因
• 便于控制算法设计与分析 • 便于通过仿真分析与评价系统性能
• 控制系统仿真的原因
• 优化控制系统设计 • 系统故障再现 • 部分替代试验,减小试验的次数 • 快速验证,大幅缩短验证周期 • 边界验证,替代具有危险性的试验
一、控制系统概述
• 控制系统建模、设计与仿真验证流程
二、控制系统的建模方法
• 数学建模过程
执行器 • 物理建模
• 试验建模
阶跃激励获取最大角速度 正弦扫频获取频率特性
二、控制系统的建模方法
• 数学模型转换
时域模型
微分方程
s=p
jw=p
求解
时域响应
传递函数
计算
频率特性
频域响应
s=jw
复数域模型
频域模型
控制系统建模、设计 与仿真概述
一、控制系统概述 二、控制系统的建模方法 三、控制律的设计方法 四、仿真验证和分析评价
控制系统建模、设计 与仿真概述
一、控制系统概述 二、控制系统的建模方法
三、控制律的设计方法 四、仿真验证和分析评价
一、控制系统概述
• 广义的控制系统
基于盘式制动器的电磁制动系统的仿真研究

阀等部件 。 使整车的质量降低 ; 易于改进 , 稍加改进 就可以增加各种电控功能; 制动响应时间短 , 提高制
动性 能 。
2汽车 A S控制 的基本原理 B
汽车在制动过程中 。其制动力受轮胎 与路面之 间附着系数的影响。 试验表明, 表征轮胎与路面之间 的附着系数与滑移率有 图 3 所示的关系。从 图中看
动; 接收车轮传感器信号 , 识别 车轮是否抱死 、 打滑
等; 控制车轮制动力 , 实现防抱死和驱动防滑并兼顾
其它系统的控制。 ) ( 轮速传感器 。 3 准确、 、 可靠 及时地 获得车轮的速度。 ) ( 电源。 4 为整个电制动系统提供能
源, 与其它系统共用。 本文所研究 的基于盘式制动器 的电磁制动 系
统, 是电子机械制动系统中的一种方式。 电子机械制 动系统按旦作 召 同可以分为电磁式和电动机
动盘
图 2 基本 结构
维普资讯
2 4
技 术 纵横
轻 型汽 车技 术
20 ( 总 2 1 06 5) 0
其工作原理类似 以前马车采用的楔块制动方法 , 马 车制动时 。 在马车车轮与轮罩之间塞入一楔型块 , 由
程序。操纵电控元件来控制制动力的大小及制动力 的分配 ,可完全实现使用传统控制元件所 能达到的 A S功能 。与传统 的 A S B B 相比具有 以下优点 : 结构 布置上要灵活 , 省去了复杂的管路系统 ; 省去 了传统 制动系统 中的制动油箱 、 制动主缸 、 助力装置 、 液压
况下 , 推动楔型块使摩擦块 与制动盘接触 , 产生制
维普资讯
2 0 ( ) 2 1 轻 型 汽车技 术 06 5 总 0
船舶柴油主机遥控系统虚拟仿真软件 功能介绍与使用说明书

船舶柴油主机遥控系统虚拟仿真软件功能介绍与使用说明书单位:大连海事大学船舶电气工程学院联系人:***联系方式:134****7961电子邮箱:*****************.cn目录一、软件介绍 (1)1.1软件简介 (1)1.2软件组成 (2)二、软件功能 (3)2.1模拟柴油机备车、起动、停止、换向等功能 (3)2.2模拟操作部位切换功能 (4)2.3应急操作功能 (4)2.4含船舶柴油机数字调速器功能模块 (5)2.5含气动逻辑单元操纵和气路控制功能模块 (7)2.6含柴油机运行三维显示功能模块 (8)2.7具有报警功能 (8)2.8含主机安全保护控制功能模块 (8)2.9支持远程网络控制功能 (9)2.10支持多终端实时操作硬件的功能 (9)2.11支持硬件数据采集的功能 (9)三、软件界面 (10)3.1登录界面 (10)3.2主界面 (10)3.3驾驶台界面 (11)3.4集控室界面 (13)3.5集控车钟界面 (14)3.6安保系统界面 (16)3.7警报界面 (19)3.8调速器界面 (20)3.9机旁控制界面 (21)3.10气动操纵界面 (24)3.11状态曲线界面 (25)3.12主机模型界面 (26)四、软件使用说明 (27)4.1登录的操作 (27)4.2操作部件的使用 (28)4.2.1车钟的操作 (28)4.2.2阀门的操作 (29)4.2.3手柄的操作 (29)4.2.4其他元器件的操作 (30)五、操作实训参考试题 (32)5.1题目——主机备车操作 (32)5.2题目——主机操纵位置切换操作(驾驶台切换到集控室) (32)5.3题目——驾驶台遥控操作(主机启停) (33)5.4题目——集控室遥控操作(主机启停) (33)5.5题目——机旁应急操作(主机启停) (34)5.6题目——紧急停车操作 (34)5.7题目——设置轮机长最大转速限制 (35)5.8题目——故障排除 (35)5.9题目——设置故障以及安全保护系统的使用 (35)一、软件介绍1.1软件简介大连海事大学自动化专业是辽宁省普通高等学校一流本科教育示范专业,辽宁省本科工程人才培养模式改革试点专业,辽宁省普通高等学校创新创业教育试点专业,依托专业建设的自动化实验教学中心为辽宁省本科实验教学示范中心。
自适应巡航控制系统的建模与联合仿真

自适应巡航控制系统的建模与联合仿真1、本文概述随着汽车行业的快速发展,智能驾驶辅助系统已成为现代汽车不可或缺的一部分。
自适应巡航控制(ACC)作为智能驾驶的重要组成部分,可以有效提高驾驶的安全性和舒适性。
本文旨在探索自适应巡航控制系统的建模和联合仿真方法。
通过构建精确的系统模型,结合先进的仿真技术,可以实现对自适应巡航控制系统性能的综合评估和优化。
文章首先介绍了自适应巡航控制系统的基本原理和功能,包括它的发展历史、技术特点以及它在汽车安全驾驶中的作用。
随后,文章阐述了自适应巡航控制系统的建模过程,包括车辆动力学模型、传感器模型、控制算法模型等关键部分的构建方法。
在此基础上,文章进一步介绍了联合仿真的概念及其在实现自适应巡航控制系统性能评估中的优势。
通过联合仿真,可以在虚拟环境中模拟真实的道路场景,全面测试自适应巡航控制系统的响应速度、稳定性和安全性等关键指标。
这种方法不仅降低了系统开发成本,而且提高了开发效率,为自适应巡航控制系统的实际应用提供了有力的支持。
文章总结了自适应巡航控制系统建模与联合仿真的重要性和应用前景,并展望了未来的研究方向。
本文的研究成果将为自适应巡航控制系统的优化和改进提供理论支持和实践指导,促进智能驾驶技术的发展和普及。
2、自适应巡航控制系统的基本原理自适应巡航控制(ACC)是一种智能驾驶辅助系统,旨在通过自动调整车辆的速度和与前车的距离来提高驾驶安全性和舒适性。
其基本原理主要基于车辆动力学、传感器技术和控制理论。
自适应巡航控制系统使用车辆前方的雷达或摄像头等传感器设备来检测前方道路环境和目标车辆的实时信息,包括前方车辆的距离、相对速度和动态行为。
这些信息为系统提供了决策依据。
基于所获得的前方车辆的信息,自适应巡航控制系统计算适当的加速或减速命令,并通过车辆的控制系统实现对发动机、制动系统和其他执行机构的精确控制。
该系统的目标是保持车辆与前车之间的安全距离,并在必要时自动调整速度,以适应前方交通环境的变化。
基于MATLAB的微型燃气轮机发电系统的建模与仿真
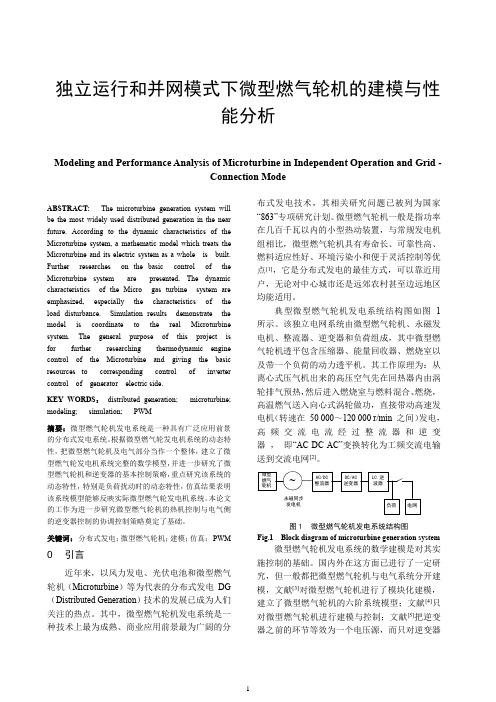
独立运行和并网模式下微型燃气轮机的建模与性能分析Modeling and Performance Analysis of Microturbine in Independent Operation and Grid -Connection ModeABSTRACT:The microturbine generation system will be the most widely used distributed generation in the near future. According to the dynamic characteristics of the Microturbine system, a mathematic model which treats the Microturbine and its electric system as a whole is built. Further researches on the basic control of the Microturbine system are presented. The dynamic characteristics of the Micro gas turbine system are emphasized, especially the characteristics of the load disturbance. Simulation results demonstrate the model is coordinate to the real Microturbine system. The general purpose of this project is for further researching thermodynamic engine control of the Microturbine and giving the basic resources to corresponding control of inverter control of generator electric side.KEY WORDS:distributed generation; microturbine; modeling; simulation; PWM摘要:微型燃气轮机发电系统是一种具有广泛应用前景的分布式发电系统。
ABS系统仿真设计

2 汽车 ABS 系统模块
2.1 仿真系统参数的定义 人们需要根据模型对参数进行定义,明确家用小型 轿车的各个基本参数,如表 1 所示。
表 1 模型的参数设定
参数名称 轮胎质量/kg 车轮半径/m 车轮转动惯量 初速度(m/s)
重力常数 制动因素
符号 M Rr I V0 g Kf
数值 22.68 0.38
slip 达到期望值时,制动效果最好,可以缩短制动距离。
文献标识码:A
文章编号:1003-5168(2ign of the ABS System
QIAN Renyong GUAN Hongwei
(Ningbo University of Finance & Economics,Ningbo Zhejiang 315175)
ωv
=
Vv Rr
slip
=
1
-
ωw ωv
(1) (2)
式中,ωv 是车轮速度的折算角速度,rad/s;Rr 是车轮
的半径,m;Vv 为汽车的线速度,m/s;ωw 是汽车的实际角
速度,rad/s;slip 是汽车的滑移率。
slip 有以下规律:当 slip =1 时,车轮为单纯的滑动,即
纯滑动;当 slip =0 时,则刚好相反,此时车轮为纯滚动。
1 ABS 系统设计思路
在 Simulink 中建立 ABS 系统仿真模型,其间需要对 各个模型进行建立,再对相应的参数进行定义,参数的定 义要符合实际,模拟实际环境进行系统仿真,得出结论并
进行分析。 汽车 ABS 系统的工作原理如图 1 所示,轮速传感器
进行轮速监测,并将测得的信号传递到电控单元中进行 计算、分析,传递指令到电磁阀,控制电磁阀的开闭进行 车轮轮缸压力的调节,使车轮的滑移率处在最佳范围内。
仓储AGV机械系统设计与仿真

仓储AGV机械系统设计与仿真一、引言仓储AGV机械系统是现代物流仓储行业的重要设备之一,通过自动导航、载货和搬运等功能实现了物品的自动化运输和分拣。
本文将介绍仓储AGV机械系统的设计与仿真,包括结构设计、动力系统设计、导航系统设计和搬运系统设计等方面。
二、结构设计1.底盘设计:底盘是AGV机器人的基础结构,需要具备一定的强度和稳定性。
底盘的设计应考虑载货能力、行驶平稳性和通过性等因素。
2.轮组设计:轮组是AGV机器人的行走部件,需要具备良好的操控性、抗颠簸性和通过性能。
轮组的设计应考虑轮子尺寸、轮子材料和轮子布置等因素。
3.载货架设计:载货架是AGV机器人搬运货物的部件,需要具备稳定性和可靠性。
载货架的设计应考虑货物尺寸、重量和承载能力等因素。
三、动力系统设计2.驱动系统设计:驱动系统是AGV机器人的动力传输装置,常见的驱动系统包括电机和传动装置等。
驱动系统的设计应考虑机器人的行驶速度、加速度和可操控性等因素。
3.制动系统设计:制动系统是AGV机器人的安全保护装置,需要确保机器人能够在紧急情况下及时停止。
制动系统的设计应考虑制动力大小和制动距离等因素。
四、导航系统设计1.感知系统设计:感知系统是AGV机器人的视觉和感知装置,用于检测周围环境和导航定位。
感知系统的设计应考虑视觉传感器、激光雷达和超声波传感器等因素。
2.定位系统设计:定位系统是AGV机器人的定位和导航装置,用于确定机器人的位置和航向。
定位系统的设计应考虑全球定位系统(GPS)、惯性导航系统(INS)和地标识别等因素。
3.控制系统设计:控制系统是AGV机器人的中枢控制装置,用于控制机器人的运动和动作。
控制系统的设计应考虑控制算法、传感器数据处理和通信系统等因素。
五、搬运系统设计1.夹爪设计:夹爪是AGV机器人搬运货物的装置,需要具备可靠的抓取和放置功能。
夹爪的设计应考虑货物类型、重量和形状等因素。
2.配送系统设计:配送系统是AGV机器人的货物分拣和配送装置,需要满足不同货物的搬运需求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机轮刹车系统的控制与仿真技术机轮刹车系统的控制与仿真技术田广来谢
利理
(西北工业大学自动化学院陕西西安71(X)72)
摘要:通过航空机轮刹车系统的控制类型控制方式以及控制规律的现状分析给出了目前航空机轮刹车控制系统存在的刹车偏航爆胎起落架抖动以及新型防滑控制律设计与应用等主要问题提出
了
飞
机防滑刹车控制系统的研究新领域:自动刹车技术刹车余度控制技术跑道自动识别技术以及电刹车系统的控制技术等;探讨了航空机轮刹车系统的模拟仿真技术半实物仿真技术以及刹车系统的性能评
佑方法展望了机轮刹车控制系统的研究方向和发展
前景
关键词:航空机轮;刹车系统;防滑控制;仿真中图分类号:U2275文献标识码:A文章编号:1仪旧一829(20(拓
)02
一以刃l一05
DeveloPmentofControland(CollegeofAutonlation,S俪ulationTechnologyofAircraftBrakingSyste
m
nANGuanglaiXIEU1
1
NorthwesternPOlytechniealUniversity兀an71佣72China)
A加tract:Thepastandpresentofcon伽1modesandlawsofaircraftbrakingsystemarereviewedThemainproblemswhiehineludebrakingyawt衅blowoutundercarri哪ditheringandneweontrollawdes
i
,and
aP
plieationaredeseribedindetailThenewrese吮hfieldsareProposedwhiehareantomatiebrakingteehn
ique
brakingredundanteontrolrunwayidentileationandeleetriealbrakingcon如1teehnolo群Thesimulation
sehemeandpedbrmaneeevaluationmethodsofai二raftbraki飞systemarepresentedandthetrendandg仪
记
prospeetofaircraftbrakingeontrolsystemfuturearepointedoutintheend
Keywords:aircraftwheel;brakingsystem;antiskideontrol:sim
ulation
飞机刹车系统是飞机重要的机载设备它是一个具有相对独立功能的子系统其作用是承受飞机的静态重量动态冲击载荷以及吸收飞机着陆时的动能实现飞机的起飞着陆滑行转弯的制动和控制对飞机的起飞安全着陆起着重要的作用它综合应用液(气)压传动技术电子技术自动控制技术和材料科学技术达到充分利用地面提供给机轮的摩擦阻力安全可靠快速地吸收飞机巨大的着陆能量使飞机停止运动现代飞机刹车控制系统由自动刹车控制系统与防滑控制系统组成优良的刹车控制系统必须在最大刹车工作状态下还能提供有效的防滑保护且能通过不断调控刹车压力得到可能达到的最高刹车效率防滑控制系统的性能与控制量的选择所采用的控制规律收稿日期:205一05一12作者简介:田广来(1956一)男陕西扶风人研究员博士研究生主要研究方向为飞机机轮与刹车系统设计与自动刹车技术;谢利理(1%3一)男陕西凤翔人教授博士主要研究方向为航空电气工程电气自动化理论与应用系统仿真刹车执行元件的响应时间等均有很大关系
飞机防滑刹车系统经过50多年的研究现已取得
很大发展飞机着陆过程持续的时间比较短因此要求防滑刹车系统安全可靠反应迅速确保飞机安全刹车对于军用飞机很可能要在恶劣的条件下起飞着陆如机场周围有较大的侧风跑道积水较深以及冰雪
搜盖着跑道这些都对防滑刹车系统提出更高的要
求
1机轮刹车系统控制仿真技术现状分析
自20世纪20年代飞机首次采用机轮刹车技术开始经过了鼓式刹车盘式刹车液压机械式防滑刹车以及电子模拟式防滑刹车直到现在的数字式防滑
刹车系统体现了飞机发展各个历史阶段同时使得
飞
机刹车系统的控制技术日益成熟与完善目前国外新型军民用飞机已普遍采用电传防滑刹车系统电传数字式刹车系统于1991年在F16战斗
机上首次成功地进行了验证并于194年向F一2战斗机交付了第1套电传数字式刹车系统法国MEss
IERBUGATn
公司已将数字式电传刹车系统用在空
中客车系列飞机上西方国家防滑刹车系统经过30《测控技术》2(X)6年第25卷第2期
40年的发展已经研究得极为深人和细致在电子防滑刹车系统和电传数字式刹车系统方面已有比较成熟的经验目前在全电刹车系统和防火液压刹车系统方面也有了较大发展;在防滑控制规律方面常规控制律最佳控制律模糊和神经网络控制律以及把地面方向控制加人刹车控制中也取得了重要突破和实际应用控制系统已经采用16位甚至更高的微处理器实现使飞机防滑刹车系统的智能化程度可靠性和安全性得到了提高目前我国飞机大部分采用前苏联研制的冷气惯性防滑刹车系统近年来电子防滑刹车系统在国内有厂一定的发展先后为几个机种研制了配套电子防滑刹车系统有些已批量装备部队其水平相当于美国的MARKm系统和英国的OSCAR系统这两种系统均属于国外上世纪70年代研制的模拟式电子防滑刹车系统我国的数字式防滑刹车控制系统研究正在起步在防滑控制的可靠性可维修性以及刹车效率和冗余技术等方面存在较大的差距有待进一步研究从控制方式来说目前飞机防滑刹车系统分为2大类:脉冲式刹车和打滑式刹车第l类系统工作时不管机轮是否打滑它按预先设计的时间间隔交替进行刹车松刹直到飞机刹停为止这类系统的刹车效率次优但性能稳定第2类系统通过传感器监测飞机的运动根据机轮是否打滑进行控制这类系统的刹车性能可望达到最优按照系统的被控量的差别第2类可以分为4种:开关式防滑刹车系统速度变化率加压力偏调控制的防滑刹车系统滑移速度控制式和滑移率控制式防滑刹车系统(l)开关式防滑刹车系统(或惯性防滑刹车系统)这种防滑刹车系统的共同点在于用惯性传感器感受机轮的减速度当减速度超过门限值时惯性传感器要么直接通过机械机构操纵液压阀使刹车装置与回油路接通要么通过接通微动电门控制电磁阀使刹车装置与回油路接通由于惯性传感器感受的信号不再通过模拟电路或数字电路进行处理防滑刹车系统也就无法仔细区分跑道表面的状况以及机轮的打滑程度也不能在跑道表面变化较大情况下获得良好的刹车性能因此这种系统的刹车效率低另一方面当这种系统利用机械机构判断打滑与否时工作频率低相当于一个低频滤波器高频干扰信号不会对它产生影响故系统工作可靠其缺点是由于给压或放压为开关式使得系统工作不平稳起落架的受力变化大(2)机轮速度变化率式防滑刹车系统机轮速度变化率加压力偏调控制式的防滑刹车系统控制量是机轮速度的变化率由于含压力偏调使得系统工作平稳起落架的受力变化小
MARKn的防滑系统是通过测量的机轮速度经微
分得到机轮速度的变化率由速度变化率与门限值
比
较判断机轮是否打滑这种防滑刹车系统在干跑道
上具有良好的性能另外MARKfl研制阶段首次增加
了很多功能如接地保护轮间保护机轮防抱死机轮
防加速旋转扰流板作动(sPoileraetuation)前轮刹车前轮防滑
等
(3)滑移速度控制式防滑刹车系
统
这种防滑刹车系统具有压力偏调功能控制量是准滑移速度滑移速度是飞机沿跑道的纵向速度与受刹机轮线速度的差值防滑刹车系统的控制器用预先设定的减速度和受刹机轮速度推算出飞机速度从
而
得到参考速度当用参考速度代替飞机速度计算滑移速度时得出的便是准滑移速度压力偏调的核心是通过延长结合系数与滑移率特性正斜率区的停留时间来提高刹车效率滑移速度控制式系统的特点是
干跑道上的性能较好混合跑道上的性能较差(4)滑移率控制式防滑刹车系统
这种防滑刹车系统是控制受刹机轮的滑移率即控制滑移速度和飞机速度的比率诸多因素中滑移
率对结合系数的影响最大用于计算滑移率的飞机速
度通常用自由滚动前轮的速度代替或由受刹机轮的速度导出这种系统不带压力偏调预先设定期望的
滑移率实际计算的滑移率同它比较然后进行控制
为了研究恶劣天气条件下飞机防滑刹车系统性能恶化的原因美国国家航空和航天管理局(NAsA)对
各种类型的刹车系统进行了试验试验结论见表1表
中的刹车效率1是根据刹车压力计算的刹车效
率
2
是根据刹车力矩计算的刹车效率3是根据结合系数计算的由表可知滑移率控制式防滑刹车系统的性
能较其他刹车系统的刹车效率高因此滑移率控制式防滑刹车系统在未来飞机防滑刹车系统的控制律设
计中将会有更好的应用前景
裹1几种防滑刹车系统的性能(试脸车)控制方式跑道状况刹车效率1刹车效率2刹车效率3
速度变化率控制式干跑道
湿跑道085069083
067081066
滑移速度控制式干跑道湿跑道093071091068滑移率控制式干跑道湿跑道091
070
089070093U75O94
U81
惯性防滑刹车干跑道
湿跑道
081071083078074069
尽管许多文献中介绍过采用现代控制理论中的自适应防滑刹车系统和模糊控制防滑刹车系统但实
际
应用未见报道目前飞机上采用的防滑刹车系统控制方式是速度差加偏压控制(PBM控制)即多门限
PID