5.铰链四杆机构基本类型讲解
铰链四四杆机构的组成与分类
曲柄摇杆机构的应用
剪板机
雷达Biblioteka 汽车雨刷缝纫机踏板
2.双曲柄机构
双曲柄机构—铰链四杆机构中两连架
杆
类型:
均为曲柄。
不等长双曲柄机构
平行双曲柄机构 反向双曲柄机构
不等长双曲柄机构
平行双曲柄机构
反向双曲柄机构
双曲柄机构的应用
惯性筛
天平
汽车车门启闭
3.双摇杆机构
铰链四杆机构中两连架杆均为摇杆。
双摇杆机构
§7-2
铰链四杆机构的组成与分类
铰链四杆机构的组成
曲柄—如果连架杆能作整周旋转, 则称为曲柄。 摇杆—如果连架杆仅能在某一角度 (小于180°)范围内摇摆, 则称为摇杆。
曲柄摇杆
铰链四杆机构的分类
1.曲柄摇杆机构
曲柄摇杆机构——铰链四杆机 构的两个连架杆中,其中一个是
曲柄,另一个是摇杆。
曲柄摇杆机构
双摇杆机构的应用
电风扇摇头机构、起重机机构。
1.铰链四杆机构中,不与机架直接连接, 且作平面运动的杆件称为( )。 C A.摇杆 B.连架杆 C.连杆 2.在铰链四杆机构中,能相对机架作整 周旋转的连架杆为(C )。 A 连杆 B 摇杆 C 曲柄 3.家用缝纫机踏板机构采用的是(A)机 构 。 A 曲柄摇杆 B 双摇杆 C 双曲柄
练习
判断 1.铰链四杆机构中,其中有一杆必为 连杆。(√ ) 2.铰链四杆机构中,能绕铰链中心作整 周旋转的杆件是摇杆。( ) × 3.反向双曲柄机构中的两个曲柄长度不 相等。( ) ×
作业
• 习题册38页 三、四题
铰链四杆机构类型判断的方式
铰链四杆机构类型判断的方式
铰链四杆机构是一种常见的机械结构,用于转动或平移运动。
要判断铰链四杆机构的类型,可以从几个方面进行分析:
1. 运动副的类型,铰链四杆机构通常由铰链连接的四个杆件组成,通过观察各个连接处的运动副类型,可以判断机构的类型。
例如,如果存在旋转副和铰链副,那么这个四杆机构就是旋转-转动铰链机构;如果存在滑动副和铰链副,那么这个四杆机构就是平移-转动铰链机构。
2. 杆件的排列方式,观察四个杆件的排列方式,可以帮助判断铰链四杆机构的类型。
如果四个杆件呈矩形排列,两对对角杆件平行,这是典型的平行四杆机构;如果四个杆件呈菱形排列,这是典型的菱形四杆机构。
3. 运动特性,观察铰链四杆机构的运动特性也可以帮助判断其类型。
通过对机构进行手动模拟或进行运动学分析,可以得出机构的运动规律,从而确定其类型。
综上所述,判断铰链四杆机构的类型需要结合运动副类型、杆件排列方式和运动特性进行综合分析,以得出准确的结论。
机械设计基础——铰链四杆机构
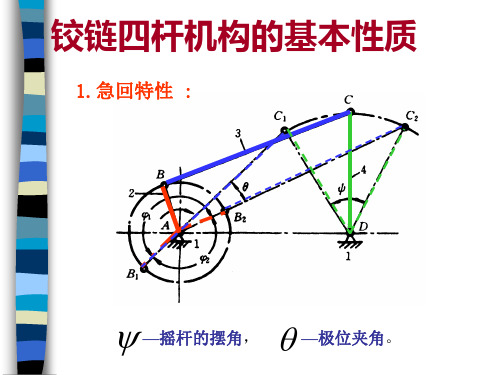
1.急回特性 : 1.急回特性
摇杆的摆角, 极位夹角。 摇杆的摆角 极位夹角 ψ —摇杆的摆角 θ —极位夹角
为描述从动摇杆的急 回特性, 回特性,在此引入行 程速比系数 K,即:
K =
180 180
+ -
θ θ
K值的大小反映了急回运动特性的显著程度。K值的大 值的大小反映了急回运动特性的显著程度。 小取决于极位夹角θ , 角越大,K值越大,急回运动 θ 角越大, 值越大, 特性越明显;反之,则愈不明显。 特性越明显;反之,则愈不明显。当时 θ = 0 ,K=1 , 机构无急回特性。 机构无急回特性。
传动角愈大,机构的传力性能愈好,反之则不利于机构 传动角愈大,机构的传力性能愈好, 中力的传递。机构运转过程中,传动角是变化的, 中力的传递。机构运转过程中,传动角是变化的,机构 出现最小传动角的位置正好是传力效果最差的位置, 出现最小传动角的位置正好是传力效果最差的位置,也 是检验其传力性能的关键位置。 是检验其传力性能的关键位置。 设计要求: 设计要求:
2.按给定的行程速比系数设计四杆机构 2.按给定的行程速比系数设计四杆机构
设计具有 急回特性 的四杆机 构,关键 是要抓住 机构处于 极限位置 时的几何 关系,必 要时还应 考虑其他 辅助条件。
θ θ θ
例:已知摇杆长度L=100,摆角 ψ =50 和行程速比 已知摇杆长度L=100, L=100 系数k=1.4 试设计曲柄摇杆机构。 k=1.4, 系数k=1.4,试设计曲柄摇杆机构。
若在设计机构时 先给定K 先给定K值,则 :
K 1 θ = 180° K +1
在生产实际中,常利用机构的急回运动来缩 短非生产时间,提高生产率,如牛头刨床、 往复式运输机等。
铰链四杆机构基本形式和特性

3.4 铰链四杆机构类型判别
3、案例分析
如图所示的铰链四杆机构ABCD中,已知各杆的长度 分别为:a=30,b=50,c=40,d=45。试确定该机构分别以
AD、AB、CD和BC为机架时,属于何种机构?(板书)
CopyRight ZDJ
3.4 铰链四杆机构类型判别
案例分析
3.1 铰链四杆机构的类型
平面铰链四杆机构:构件间均用用转动副相连的平面四 杆机构。如:脚踏式脱粒机
脚踏式脱粒机
CopyRight ZDJ
3.1 铰链四杆机构的类型
二、铰链四杆机构组成
(1)机架:机构中固定不动的构件。 (2)连架杆:与机架连接的构架。
曲柄:若能绕机架作整周转动的连架杆则称为曲柄。 摇杆:只能绕着机架在一定范围内摆动的连架杆。 (3)连杆:不直接与机架相连的构件。
CopyRight ZDJ
3.2 平面四杆机构的特性-死点特性
(1)死点的概念
曲柄摇杆机构中,当摇杆为主动件时,当连杆与从动曲
柄共线时,机构的传动角γ=0°,此时主动件CD 通过连杆 作用于从动曲柄AB上的力恰好通过其回转中心,所以出现了 不能使构件AB转动的顶死现象,机构的这种位置称为死点位
置或死点。
缝纫机的脚踏机构
CopyRight ZDJ
3.2 平面四杆机构的特性-死点特性
(3)克服死点的方法
(1)增大从动件的质量,利用惯性度过死点位置。 (2)在从动曲柄上施加外力或安装飞轮以增加惯性。 (3)采用相同的机构错位排列。
缝纫机的脚踏机构
火车车轮联动装置
CopyRight ZDJ
3.3 铰链四杆机构曲柄存在条件
CopyRight ZDJ
铰链四杆机构基本性质完美教案 (公开课)(推荐文档)

《机械基础》铰链四杆机构的基本性质教案学院:专业:班级:姓名:学号:电话:年月第二节《铰链四杆机构的基本性质》教案一、复习有关内容(6分钟):1.铰链四杆机构有三种基本形式,即曲柄摇杆机构、双曲柄机构和双摇杆机构。
2.曲柄:与机架用转动副相连并能绕着该转动副作连续整周旋转运动的构件。
2.摇杆:与机架用转动副相连并能绕着该转动副作往复摆动的构件。
3.曲柄摇杆机构:一连架杆为曲柄、另一连架杆为摇杆的铰链四杆机构,其中曲柄作连续整周旋转运动,摇杆在一定范围内作往复摆动。
4.双曲柄机构:两连架杆都为曲柄的铰链四杆机构,其中两曲柄都作连续整周旋转运动。
5.双摇杆机构:两连架杆都为摇杆的铰链四杆机构,其中两摇杆都在一定范围内作往复摆动。
二、导入新课(4分钟):通过曲柄摇杆机构的动画模拟其两共线位置,设疑提问,引导学生思考曲柄的存在必须满足一定的条件(设置悬念)。
三、讲授新课(33分钟):(一)曲柄存在的条件:1.已知:AB=a,BC=b,CD=c,AD=d,如图5-17所示,进行详细分析。
2.第一次共线时:AC1D构成一个三角形,有两边之和大于第三边。
即:b-a+c>d a+d<b+c;b-a+d>c a+c<b+d.3.第二次共线时:AC2D构成一个三角形,有两边之和大于第三边。
即:a+b<c+d.4、考虑到两次共线正好四杆都重合成一直线,有:(1)a+d≤b+c;(2)a+c ≤b+d ; (3)a+b ≤c+d.5.分析思考以上三式得出结论: (1) a 是最短杆;(2) b 、c 、d 中有一杆为最长杆;(3) 三式中必然有一式是:最短杆与最长杆的长度之和小于或等于其余两杆长度之和。
6.得出推论,即曲柄存在的条件是: ①连架杆与机架中必有一个是最短杆。
②最短杆与最长杆的长度之和不大于其余两杆的长度之和。
7. 根据曲柄存在的条件,可以推论出铰链四件机构的三种基本类型的判别方法: 若满足最短杆与最长杆的长度之和小于或等于其余两杆的长度之和,则: 最短杆为连架杆→ 构成曲柄摇杆机构 最短杆为机架→ 构成双曲柄机构 最短杆为连杆→ 构成双摇杆机构(二)急回特性1. 定义:曲柄摇杆机构中,曲柄作等速转动,而摇杆摆动时空回行程的平均速度大于工作行程的平均速度(即V2>V1),这种性质称为机构的急回特性。
铰链四杆机构类型判别
看一看比一比
看一看比一比
曲柄摇杆机构 双曲柄机构
双摇杆机构
一个曲柄
二个曲柄
无曲柄
是否有曲柄的存在?
那么,铰链四杆机构在什么情况下有曲柄呢?
以曲柄摇杆机构为例(设各杆长度依次
为L1、L2、L3、L4,且L1<L4)
结论:铰链四杆机构存在 一个曲柄的条件是:
(一)最短杆与最长杆长度之
和 小于或等于其余两杆长度之和。
不满足曲柄存在条件
双摇杆机构
铰链四杆机构的类型判别方法:
最短杆与最长杆长度之和小于或等于其余两杆长度之和
[实验一]
结论:
取最短杆的相邻杆为机架,
构成曲柄摇杆机构;
取 最短杆 为机架, 构成双曲柄机构; 取最短杆的相对杆为机架, 构成双摇杆机构。
[实验二]
返回
解题步骤:
1、判别:Lmax+Lmin与L1+L2的关系?
• 10、你要做多大的事情,就该承受多大的压力。12/12/
2020 2:16:03 AM02:16:032020/12/12
• 11、自己要先看得起自己,别人才会看得起你。12/12/
谢 谢 大 家 2020 2:16 AM12/12/2020 2:16 AM20.12.1220.12.12
• 12、这一秒不放弃,下一秒就会有希望。12-Dec-2012 December 202020.12.12
•
2、阅读一切好书如同和过去最杰出的 人谈话 。02:1 6:0302: 16:0302 :1612/ 12/2020 2:16:03 AM
•
3、越是没有本领的就越加自命不凡。 20.12.1 202:16: 0302:1 6Dec-20 12-Dec-20
铰链四杆机构的基本形式和特性
四、双滑块机构: 改变构件的形状和运动副
当摇杆为主动件,连杆和曲柄共线时,过铰链中心A的力,对A点不产生力矩,不能使曲柄转动,机构的这种位置称为死点位置 。 曲柄摇杆机构的最小传动角出现在曲柄与机架共线( =0º或 =180º)的位置。 铰链四杆机构类型的判断条件:
(3)取最短杆的对边为机架时,机架上没有整转副, 该机构为双摇杆机构。
2)若不满足杆长和条件: 该机构只能是双摇杆机构。
注意: 铰链四杆机构必须满足四构件组成的
封闭多边形条件:最长杆的杆长<其余三杆
长度之和。
2
B
C
3
1
4
A
D
双曲柄机构
B 1
2 C
3
A
4
D
双摇杆机构
曲柄摇杆机构
§2—3 铰链四杆机构的演化
F2
C
γF α
δ F1 vc
D
F1 为有效分力 F1 = Fcosα , F1
在连杆设计中,为度量方便,习惯用传动角γ来判 断机构传力性能。 γ F1,机构传力性能越好,
反之,机构传力越费劲,传动效率越低。
机构运转时,传动角γ是变化的,为
了保证机构的正常工作,机构的传动角作出 如下规定(P23)
机构特性
雷达天线俯仰机构
曲柄摇杆机构的一些主要特性:
1、机构的急回运动特性:
铰链C的平均速度:
B
C1
θ
C C2
ψ 摆角
v1 =C⌒1C2/t1 v2 =C⌒1C2/t2
v1<v2
1
B2
它表明摇杆具
A
平面铰链四杆机构分类
平面铰链四杆机构分类一、引言平面铰链四杆机构是一种常见的机械传动结构,由四个杆件通过铰链连接而成。
它具有简单、可靠、刚性好等优点,在机械领域有着广泛的应用。
本文将对平面铰链四杆机构进行分类和分析,以期更好地了解和应用这一机构。
二、分类平面铰链四杆机构可以根据其杆件的链接关系和机构的运动方式进行分类。
2.1 根据杆件链接关系分类•对称四杆机构:四个杆件两两对称连接,形成一个对称的结构。
常见的具有对称结构的平面铰链四杆机构有平行四杆机构和梯形四杆机构。
•非对称四杆机构:四个杆件之间没有对称关系,形成一个非对称的结构。
常见的非对称平面铰链四杆机构有双曲线四杆机构和椭圆四杆机构。
2.2 根据机构的运动方式分类•旋转运动四杆机构:机构中至少有一个连杆可以绕铰链进行旋转运动。
例如,摇杆机构和滑块机构都属于旋转运动四杆机构。
•平动运动四杆机构:杆件只能以平动的方式运动,不能绕铰链进行旋转运动。
典型的平动运动四杆机构有单滑块机构和双滑块机构。
三、对称四杆机构3.1 平行四杆机构四杆机构中的两个杆件平行于彼此,并且与另外两个杆件相互垂直。
平行四杆机构有两组平行链接的杆件,因此具有对称的结构。
其机构特点是:•杆件a和b平行,杆件c和d平行;•杆件a和d通过铰链连接,形成了机构的链接框架;•杆件b和c通过其他的铰链连接。
3.2 梯形四杆机构四杆机构中的两个杆件不平行,而是呈现出梯形的形状。
梯形四杆机构同样具有对称结构,其机构特点是:•杆件a和b不平行,杆件c和d不平行;•杆件a和d通过铰链连接,形成了机构的链接框架;•杆件b和c通过其他的铰链连接。
四、非对称四杆机构4.1 双曲线四杆机构四杆机构中的杆件连接形成一个双曲线的形状,因此称为双曲线四杆机构。
其机构特点是:•杆件a和b彼此相交,杆件c和d彼此相交;•杆件a和d通过铰链连接,形成了机构的链接框架;•杆件b和c通过其他的铰链连接。
4.2 椭圆四杆机构四杆机构中的杆件连接形成一个椭圆的形状,因此称为椭圆四杆机构。
铰链四杆机构类型的判定
A.曲柄摇杆机构 B。双曲柄机构 C.双摇杆机构D. 以上答案均不对
练一练:
1、在图5-3中构成双曲柄机构的是( A )。
练一练:
1、如图所示铰链四杆机构构成曲柄摇杆机构时,须固定( B )。
A、杆AD B、杆AB或杆CD C、杆BC
D、杆AD或构
BC为机架——曲柄摇杆机构
CD为机架——双摇杆机构
AD为机架——曲柄摇杆机构
练一练:
1、铰链四杆机构的最短杆与最长杆的长度之和大于其余两杆的长度之和时,机构
__A___ 。
A.有曲柄存在 B。不存在曲柄 C. 有时有曲柄,有时没曲柄 D. 以上答案均不对
2、平面四杆机构中,如果最短杆与最长杆的长度之和小于或等于其余两杆的长度之
是否满足曲柄存在的条件
满足 不满足
最短杆位置 连架杆 机架 连杆
基本类型 曲柄摇杆机构 双曲柄机构 双摇杆机构 双摇杆机构
练一练:
1.铰链四杆机构的基本形式有哪几种?如图所示,已知铰链四杆机构各构件的长度分别
为 a=240mm,b=600mm,c=400mm,d=500mm。试问当分别取AB.BC.CD.AD为机架时,将各
铰链四杆机构各杆的长度(mm)如下,取杆BC为机架,构成双曲柄 机构的是( C )。 A、AB=130,BC=150,CD=175,AD=200 B、AB=150,BC=130,CD=165,AD=200 C、AB=175,BC=130,CD=185,AD=200 D、AB=200,BC=150,CD=165,AD=130
第二步:铰链四杆机构类型的判定
1、取最短杆为连架杆
曲柄摇杆机构
1、取最短杆为机架
双曲柄机构
铰链四杆机构基础认识
铰链四杆机构1)四根杆子的名称及特点机架——固定不动连杆——机架的对边杆曲柄——能整周转摇杆——不能整周转2)铰链四杆机构的三种基本类型曲柄摇杆机构、双曲柄机构、双摇杆机构3)曲柄存在的条件:a)最短杆与最长杆的长度之和小于或等于其余两杆长度之和;b)连架杆或机架中必有一是最短杆。
注意:1.上述两条件同时满足必有曲柄存在;2.满足其中一条件可能有曲柄存在;3.如有一条件不满足,肯定没有曲柄存在。
推论1:最短杆与最长杆的长度之和小于或等于其余两杆长度之和(1)连架杆最短——曲柄摇杆机构;(2)机架最短——双曲柄机构;(3)连杆最短——双摇杆机构。
推论2:最短杆与最长杆的长度之和大于其余两杆长度之和。
此条件不满足曲柄存在的条件,所以无论何杆最短均只能得到双摇杆机构。
曲柄摇杆机构在铰链四杆机构中,若两个连架杆,一为曲柄,另一个为摇杆,则此铰链四杆机构称为曲柄摇杆机构。
通常曲柄1为原动件,并作匀速转动;而摇杆3为从动件,作变速往复摆动。
1)曲柄摇杆机构的主要特性:a)急回运动曲柄摇杆机构中,曲柄AB在转动一周中,在B1、B2两次与连杆BC共线,相应铰链中心 A与C之间的距离AC1和AC2分别为最短和最长,摇杆CD的位置C1D和C2D分别为其左右极限位置。
摇杆在两极限位置间的夹角ψ,称为摇杆的摆角。
当曲柄由位置 AB1 顺时针转到位置AB2 时,曲柄转角ψ1=180°+θ,这时摇杆由左极限位置C1D 摆到位置右极限位置C2D,摆杆角度为ψ;而当曲柄顺时针再转过角度ψ2=180°-θ时,摇杆由位置C2D摆回至位置C1D,其摆角仍然是ψ 。
虽然摇杆来回摆动的摆角相同,但对应的曲柄转角不等(ψ1 > ψ2);当曲柄匀速转动时,对应的时间也不等(t 1> t 2)。
令摇杆自ClD摆至C2D为工作行程,这时铰链C的平均速度是 v1=C1C2 /tl 。
摇杆自C2D摆回至C1D是其空回行程,这时C点的平均速度是v2=C1C2 /t2,显然v1 < v2 ,它表明摇杆具有急回运动的特性。