基于PID的汽车定速巡航控制系统的研究
汽车自动巡航系统的PID控制
专题论 述
汔 车自 动巡黼系统硇 PD控 制 I
大连 民族 学 院机 电信 息工程 学 院 朱丽 丽 赵 秀春
[ 摘 要] 本文对汽车巡航 控制 系统 , 基于 P D控 制理论针 对定速 和跟 车两种 驾驶模 式进行控制研 究。通过 MAT A I L B仿真表 明: 采
+
o
( 4 )
( 5 1
被 控 对 象 所 用 到 的是 控 制 量 的 增 量 ,则 要 导 出提 供 增 量 的 PD控 I 制算式 , 推导得 :
u_) l .) ∑ ( 1kl 1 k = +
=
争e1k《 l() Ii k 2 f _ )
则 推 出增 量 △ (1 uk: △l )uk一 (— )Kl()ek 1 Ke )K k+ ck 1 ek 2 lk= ()uk 1 k一 (- ) .k+ ()2(一 ) (一 ) ( = e + ( + K△ek+ 。k+ ̄Ae )A (一1 ()Ke )I[ ( - e ( k k () 6 K 为比例系数 、 . K 为积 分时间常数 、 为微分时 问常数 , K. 一旦确定
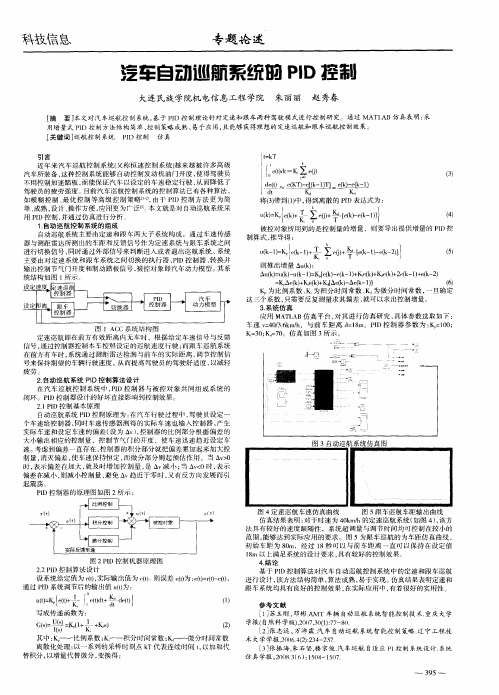
图 lA C系 统 结 构 图 C
定速巡航即在前方有效距离 内无 车时 ,根据 给定车速信号与反馈 信 号 , 过 控 制 器 控 制 本 车 按 照 设 定 的 巡 航 速 度 行驶 ; 跟 车 巡 航 系 统 通 而 在前方有车时 , 系统通过测距雷达检测 与前车的实际距离 , 凋节控制信 号来保持期望的车辆行驶速度。 而提 高驾驶员 的驾驶舒适度 , 从 以减轻 疲劳 。 2 自动巡航 系统 PD控制算法设计 。 I 在汽 车巡航控制 系统 中, I P D控制 器与被控对 象共 同组成 系统 的 闭环 。PD控制器设计的好坏直接影响到控制效果。 I 21 I 制 基 本 原 理 . PD控 自动巡航系统 PD控制原理为 : I 在汽车行驶过程 中 , 驾驶员设定一 个车速给控制器 , 同时车速传感 器测得的实际车速也输 入控制器 , 产生 实际车速和设定车速 的偏差( 设为 △ )控 制器的 比例部分根据偏 差的 v, 大小输出相应 的控制量 ,控 制节气门 的开度 ,使车速迅 速趋近设定车 速。 考虑到偏差一 直存在 , 控制器的积分部分就把偏差累加起米加大控 制量 , 消灭偏差 , 使车速保持 恒定 , 而微分部分则起预估作崩 :当 A > vO 时, 表示偏差在加大 , 及时增 加控制量 , △ 减 小 ; A < 时 , 就 是 v 当 v O 表示 偏差在减 小, 则减小控制量 , 避免 △ v趋近于零时 , 又有反方 向发展 而引 起 震 荡 PD控 制 器 的 原 理 图 如 图 2所示 : I
汽车自动巡航系统PID控制策略的研究
汽车自动巡航系统PID控制策略的研究摘要:文章介绍汽车自动巡航控制系统的结构组成和工作原理,选择基于Atmega 8 单片机的PID 控制策略实现车辆的稳定行驶及加速、减速的控制过程。
本系统能有效地减轻长途驾驶中驾驶员的工作强度,提高舒适性,并减少燃料消耗,利于环保。
关键词:自动巡航;PID;Atmega 80 引言据调查,10%的交通事故是由疲劳驾驶、操作不当引起的,本文介绍的汽车自动巡航控制系统可以有效地减轻驾驶员的疲劳,避免交通事故,并利于环保。
当在高速公路上长时间行驶时,打开该系统的自动操纵开关后,巡航控制系统将根据行车阻力自动增减节气门开度,避免驾驶员频繁踩油门踏板就可使汽车行驶速度保持一定,大大地减轻了驾驶员的疲劳强度。
由于巡航控制系统能自动地维持车速,避免了油门踏板不必要的人为变动,进而减少了汽车燃料的消耗和废气的排放。
1 汽车巡航控制系统的构成汽车电子自动巡航控制系统主要由巡航控制开关、车速传感器、电子控制单元(ECU)、汽车制动开关、执行器等组成。
电子自动巡航控制系统的组成部分及各部分在汽车内的安装如图1 所示。
下面将具体介绍各部分结构原理及功能。
(1)巡航控制开关。
当接通主开关后,若车速在巡航控制的范围内(一般为40~200km/h)时,断开设定/滑行开关,此时车速会存储于RAM 中,汽车维持此速度稳定行驶。
当驾驶员希望巡航的车速提高时,接通恢复/加速开关,巡航控制ECU 就会通过执行器使节气门的开度增大,使汽车加速行驶,此时,存储汽车实际车速参数的RAM 存储器处于动态刷新状态,开关断开瞬间时的车速存储于存储器,之后汽车将以此速度匀速行驶;当驾驶员希望稳定的车速降低时,接通设定/滑行开关,巡航控制ECU 就会通过执行器使节气门开度关小,汽车减速滑行,此时存储汽。
汽车自动巡航系统的PID控制研究
汽车自动巡航系统的PID控制摘要目前,汽车巡航控制系统的控制算法已有各种算法,如模糊控制、最优控制等高级技术等,由于PID控制方法更为成熟,设计、操作方便,应用更为广泛。
本文就是对自动巡航系统采用PID控制,并通过仿真进行分析。
本文对汽车巡航控制系统进行研究。
考虑了定速和跟车两种驾驶模式并通过决策模块进行切换,并引入逆模型对模型进行了分析,使之适用于巡航控制系统的研究。
研究了可用于汽车巡航控制的控制方法,建立了PID控制系统模型。
整个控制系统应用ACC的逆模型,以比例—积分—微分(PID)算法建立控制器,调整控制器参数,构成有效的控制系统。
利用MATLAB/SIMULINK,在已有数学模型基础上,建立了整个系统的两大主要仿真模块:决策模块和ACC控制模块。
构建起了整个仿真系统,调整了各个仿真模块的参数,仿真结果较为合理。
关键词:巡航控制系统;PID控制;仿真AbstractAt present, the automobile cruise control system control algorithm had each algorithm,if controls, the optimum control fuzzily and so on the high-level technology and so on.. Because of maturer and ease of operation, the PID control method is more widespread. This article is uses the PID control to the automatic cruise system, and carries on the analysis through the simulation.This article conducts the research to the automobile cruise control system.We had considered the constant speed and carries on the cut with the vehicle two kind of driving patterns and through the policy-making module,and introduced the counter model to carry on the analysis to the model,to make it suitabling in the cruise control system research.We has studied available in the automobile cruise control method, and has established the PID control system model. In entire control system, we take the operating speed and the cruise vehicle speed error as an input value, and the operating speed as output value, then we use the counter model of ACC. Taking a proportion–integral--differential (PID) controller as the controller to adjustment the controller on line,then we constitute the effective control system.Using MATLAB/SIMULINK, we had in the mathematical model foundation.And we has established the overall system two big main simulation module: Policy-making module and ACC control module,to constructed the entire simulation system.We has adjusted each simulation module parameter, causes the simulation system reasonably, the accurate simulation real system.Key Words:Cruise control system;PID control;Simulation目录摘要 (I)Abstract (II)1 绪论 (1)1.1 课题研究的目的和意义 (1)1.2 自动巡航系统研究现状及发展趋势 (2)1.3 论文研究内容 (5)2 汽车巡航系统模型的建立 (6)2.1 自动巡航系统ACC的建模 (6)2.1.1 ACC系统的结构分析 (6)2.1.2 ACC逆模型的建立 (7)2.2 决策模块的建立 (8)2.2.1 决策系统介绍 (8)2.2.2 上位系统的建立 (8)2.3 模块的封装 (10)3 增量式PID控制算法设计 (11)3.1 PID控制器的设计 (11)3.2 PID控制算法的选择 (12)3.3 控制系统采样周期的选择 (13)3.4 PID控制器的仿真分析 (13)4 系统仿真及分析结果 (15)4.1 仿真语言简介 (15)4.2 仿真及结果分析 (15)结论 (18)参考文献 (19)致谢.................................................................................................. 错误!未定义书签。
汽车PID巡航系统控制策略浅析

汽车PID巡航系统控制策略浅析本文介绍了汽车巡航的功能,组成,作用和原理,分析了其中的传感器,控制器,执行机构的工作原理;通过对比PID控制,模糊控制,迭代学习控制和自适应控制的工作特点,分析了各种巡航控制策略的优劣。
标签:巡航;控制;PID0 引言汽车巡航控制是当下汽车发展中正在普及的一项技术,这项技术在汽车长途行驶中降低驾驶员疲劳驾驶,降低一些外在因素而发生的事故。
但是汽车巡航控制系统并没有发展完善,很多问题伴随驾驶員驾驶汽车时而产生。
巡航制控系统(Cruise Control System)简称CCS(车辆速度控制系统),是指在驾驶员不需要踩油门通过巡航控制器设置一个特定的车速而使行驶车辆车速不断在接近设定车速限制内行驶的控制装置[1]。
驾驶汽车在高速公路上行驶,虽然外界因素相对稳定,但驾驶时间长了还是需要适当的更改汽车行驶速度,长时间驾驶车辆对人各方面都会有一定的影响,容易出现不利于驾驶的因素产生,因此在汽车上安装巡航系统。
汽车巡航问世之后也伴随着一些问题的出现,比方巡航系统打开无法关闭,巡航系统在不同操作系统下的关闭方法不同。
在技术上也有一定的进步例如从以前单方面的让车保持一种车速下行驶到现在跟车定速等。
不管从巡航系统的不足到问题的分析还是从巡航系统的技术升级,我们都应该对汽车巡航系统控制系统进行分析,从而加强对技术的学习与研究深度,提升分析和解决问题的能力。
1 巡航系统发展方向进入21世纪以来,由于汽车电子元件越来越普遍地应用在汽车上以及各地公路、高速公路的不断发展,使得定速巡航系统已经逐步变得成熟,系统的电路以及布线有了很大的进步,控制部分更加快捷与精确,多路传送系统的技术变得更加成熟,故障自动报警系统发展得更加精准[2]。
总体看来,巡航系统的发展方向具体有以下几点:1.1 先进控制方法的引进车辆在行驶过程中的实际工况是很复杂的,它主要受到车载人员的人数、发动机的当前状况等因素的影响,驾驶员对舒适性的要求更高了,引入新技术的巡航控制系统在以传统的控制原理为基础,又引入不少先进的控制理论,目前,PID 控制,自适应控制和模糊控制等原理先后被研发使用[3]。
基于PID智能控制算法的智能车车速控制研究
2019年软 件2019, V ol. 40, No. 1作者简介: 赵永永(1990-),男,电子信息助理工程师,硕士研究生在读,研究方向:机器人智能控制。
基于PID 智能控制算法的智能车车速控制研究赵永永(长春理工大学,吉林 长春 130022)摘 要: 智能车是综合采用多种传感器与智能公路技术来实现对智能车辆自动驾驶。
智能车存有一套导航信息资料库,包含全国高速公路、城市道路、普通公路以及各种服务设施的信息资料。
中国重点发展的一些科技促使中国智能车的出现,这种智能车在进行运行的过程中不需要人为的对车速进行控制,整体的速度是由车辆本身自带的系统进行控制。
这种智能车的出现极大的方便了人们的生活,并且能够减少交通事故的发生频率。
PID 智能车车速控制算法是近些年来新兴的一种智能车控制技术,这种控制算法的应用能够极大程度上提高车辆的可控性,在智能车系统的可控技术方面具有光明的研究前景。
关键词: PID 智能控制算法;车速控制;研究展望中图分类号: U260.5+1 文献标识码: A DOI :10.3969/j.issn.1003-6970.2019.01.041本文著录格式:赵永永. 基于PID 智能控制算法的智能车车速控制研究[J]. 软件,2019,40(1):195-198Research on Intelligent Vehicle Speed Control Based on PID Intelligent Control AlgorithmsZHAO Yong-yong(Changchun University of Science and Technology, Changchun, Jilin 130022)【Abstract 】: Intelligent vehicles can realize automatic driving through multiple sensors and intelligent highway technology, which has a set of navigation information database, containing information of national highways, urban roads, ordinary highways and various service facilities. Some key technologies in China have prompted emergence of intelligent vehicles, whose speed is controlled by vehicle's system instead of artificial speed control during opera-tion. Emergence of intelligent vehicles has facilitated people's lives greatly, and reduced frequency of traffic acci-dents. PID intelligent vehicle speed control algorithm is a new intelligent vehicle control technology in recent years, whose application can improve controllability of vehicles greatly, and has bright research prospects in controllability technology of intelligent vehicle system.【Key words 】: PID intelligent control algorithm; Vehicle speed control; Research prospects0 引言随着科学技术水平的提升,中国的车辆制造也在朝着更加智能化的方向发展和进步。
基于PID算法的汽车巡航系统研究
基于PID算法的汽车巡航系统研究毕强【摘要】设计了基于freescale单片机的汽车巡航系统控制器,它能够判断设定车速和实际车速之间的差值,采用PID控制算法,对发动机节气门开度进行闭环控制。
设计了CAN总线接口,方便系统与其它车载电子系统的通信和信息交换。
该控制器结合适当的执行结构,就可以自动保持车辆的定速行驶,减轻了驾驶疲劳,提高了车辆的安全性。
%Aimed at the security and the comfort capability request, the car crmse system t Gt:5) based on tree scale single chip was designed. The system estimate the difference of the set car speed and the actual car speed, adopt the PID arithmetic, control the valve of the accelerograph in closed loop. And the CAN bus interface was designed, make the communication with other electronic system on the car conveniently. This system can keep the car speed automatically, lighten the drive tire, and improve the security of the car.【期刊名称】《九江职业技术学院学报》【年(卷),期】2012(000)002【总页数】4页(P12-14,9)【关键词】巡航控制;PID算法;Freescale单片机;CAN总线【作者】毕强【作者单位】九江职业技术学院,江西九江332007【正文语种】中文【中图分类】TM38随着国民消费水平的提高,人们对于汽车的舒适性的要求越来越高。
汽车巡航系统PID控制器设计
汽车巡航系统PID控制器设计本文中,首先建立了基于PID控制器的巡航控制系统框图如3.3所示。
图3.3 巡航系统PID控制系统框图Fig. 3.3 The block diagram of ACC PID control system以参考车速与巡航车实际车速之差E为PID控制系统输入变量,差值E经PID控制器计算,输出节气门开度值,节气门开度输入车辆纵向动力学模型中,输出巡航车实际速度,实际车速作为反馈量形成闭环控制。
(1)汽车结构参数选取选取的车辆参数如下表3.4所示。
表3.4 车辆结构参数Tab. 3.4 Vehicle structure parameters参数符号取值车辆质量m1250 kg轴距L 2.5 m 轴距离重心距离f L 1.1 mL 1.4 m 后轴距离重心距离rC0.379 kg/m2风阻系数d车轮半径r0.334 m等效迎风面积A 1.93 m2发动机转动部件和液力变I0.11 kgm2矩器泵轮的有效转动惯量e前轮转动惯量f I 1.8 kgm2I 1.8 kgm2后轮转动惯量r减速器传动比o i 4.43 传动系动力传递系数t 0.99滚动阻力系数f0.02(2)仿真工况设计论文设定仿真时间140s,设计了多种仿真工况,包括低速行驶状态下匀加速、匀速,高速行驶状态下匀加速、匀速及匀减速工况。
具体描述为初始时刻巡航车静止,前方目标车辆以12km/h起步并以0.8m/s2加速度加速至20km/h,然后以此速度匀速前进30s,在40s时再以1.5 m/s2加速至80km/h,保持80km/h速度匀速前进至120s,最终再以-0.5m/s2匀减速行驶。
汽车巡航系统PID控制仿真模块,它由纵向动力学模块及其控制器模块组成。
纵向动学模块包括发动机模块、液力变矩器模块、自动变速器模块以及车辆传动、行驶系及整车运动系统模块。
车辆纵向动力学模块仿真框图图中,FDJ——发动机子模块;YLBJQ——液力变矩器模快;CD——传递模块;CLDLX——车辆传动、行驶系及整车运动系统模块。
基于PID控制器的汽车运动控制系统设计
(7) Kp,Ki 和 Kd 的选择一般先根据经验确定一个大致的范 围,然后通过 MATLAB 绘制的图形逐步校正。这里我们取 Kp=700,Ki=100,Kd=100。程序代码为 : hold on; Kp=700; Ki=100; Kd=100; num=[Kd Kp Kd]; den=[m+Kd b+kp Ki]; disp( ‘PID 校正后的闭环传函为 :’ ) printsys(num,den); t=0:0.01:50; step(u*num,den,t);
运动控制
94
基于PID控制器的汽车运动控制系统设计
Design of Automobile Movement Control System Based on PID Controller
文 / 杭州机械有限公司 姜学明
摘要 :本文通过对汽车运动控制系统进行研究和分析,利用 MATLAB/Simulink 对其进行仿真。首先对汽车的运动原理进 行分析,建立控制系统模型和系统的硬件设计,确定期望的静态指标 ( 稳态误差 ) 和动态指标,最终应用 MATLAB 来实现 汽车运动控制系统的模型设计和仿真。
图 2 运动控制系统结构图
4 运动控制系统 PID 控制器的设计
传统的 PID 控制器主要由比例环节、积分环节和微分环 节三大部分组成。也是目前控制领域应用最为广泛的一种控 制器。传统的 PID 控制器数学模型可表示为:
(5) 其中 :u(t) 为控制器的输出;Kp 为比例放大系数;e(t) 为控制器的输入偏差信号;Ti 为控制器的积分响应时间;Td 为控制器的微分响应时间。 因传统 PID 控制器大多是采用数据采样的方式进行控
基于PID的汽车定速巡航控制系统的研究
基于PID的汽车定速巡航控制系统的研究摘要:随着汽车工业和公路运输业的发展,汽车会越来越普及,人们将需要更加舒适、简便和安全的交通工具。
汽车巡航控制系统是一种辅助驾驶系统,它不但可以减轻驾驶员的负担,还可以提高驾车的舒适性。
汽车巡航控制系统具有非线性、时变不确定性,并受到外界扰动、复杂的运行工况等影响,采用传统PID控制很难取得满意的效果,本文介绍了一种基于模糊PID控制算法的汽车巡航控制系统。
本文首先阐述了汽车巡航控制系统的历史背景、在国内外的研究应用现状及其发展趋势,并详细介绍了巡航控制系统的构成。
通过对一种采用闭环控制的巡航控制系统进行分析,阐述了巡航控制系统的控制原理。
然后,本文对汽巡航控制系统进行了简要的分析,将模糊PID控制方法作为其控制方案,并设计出系统的模糊控制器。
以轿车为对象,分析了汽车在行驶过程中的驱动力及受到的各种阻力和干扰力,并建立起汽车纵向动力学模型。
利用MATLAB建立了系统的仿真模型,并对汽车巡航控制系统进行了仿真和分析。
由仿真结果可知,模糊PID控制方法能使系统相应的超调减小、反应速度加快、控制效果良好,是一种适用于汽车巡航控制系统的控制方法。
论文的内容是基于传统的汽车巡航控制系统,对现有的PID控制进行完善和优化。
发挥模糊控制的优势对现有的汽车巡航控制系统进行改进,令控制过程具有一定的智能水平。
有助于提高巡航控制的效果,减少车速变化,最大限度节省燃料,降低排气污染,提高发动机的使用效率,改善汽车动力性和乘坐舒适性。
最后利用MATLAB软件中的模糊逻辑工具箱对系统的设计进行仿真,验证系统设计的可行性,观察模糊控制的效果,并对部分基础电路进行设计。
通过仿真结果分析得出平均巡航响应时间加快了15.9秒,响应超调量平均减小了15.02%。
有助于模糊控制在汽车巡航系统中应用的普及。
关键词:巡航控制系统;MATLAB;模糊PID;仿真Research on Automobile Cruise Control SystemBased on DSPAbstract:With the development of automobile industry and carrying trade,automobile will be more and more widespread.More comfortable,more convenient and safer vehicle will be needed.Automobile cruise control system,which not only could relieve the drivers’burden but also could make the driving comfortable,is a kind of accessorial driving system.Cruise control system has high nonlinearity and non-determinacy with time changing.And CCS,which is effected by some factors such as external load disturbers and complicated running modes,will not have a good running effect with the traditional PID contr01.A kind of CCS which is based on Fuzzy PID control is introduced in the thesis.First,the background of cruise control system and its status and developing trend is expatiated on in the dissertation.The composing of CCS is also introduced in detail.The principium of CCS is described by analyzing a kind of closed loop system.After analyzing the cruise control system briefly,Fuzzy-PID is confirmed as the control method of the system.Then the Fuzzy PID controller is designed.As the object is a car,the thesis analyzes the resistances and disturbs while the car’s running.And the automobile dynamics model is given.After setting up the model by means of MATLAB,the result is analyzed.From the result,we may know that Fuzzy PID control could make the overshoot smaller and the response time shorter.The effect of Fuzzy PID method is given,SO it is a suitable method for CCS.Paper is based on the traditional automobile cruise control system,improved and optimized the PID control.Play to the advantages of fuzzy control to improve the existing vehicle cruise control system,so that the control process has some intelligence.Cruise control will help to improve the effectiveness and reduce the speed of change,the maximum fuel savings and reduce exhaust pollution,improveengine efficiency,improved vehicle power and comfort.Finally,use the Fuzzy Logic Toolbox in MATLAB software to simulate the design of the system,to verify the feasibility of the system design,observe the effect of fuzzy control,and design some basic circuit.By analysis the simulation results,the average cruise speed up response time of15.9seconds,average response overshoot reduced15.02%.Help of fuzzy control application in the automobile cruise control system in popularity. Keywords:cruise control system;MATLAB;Fuzzy PID;simulation目录1绪论 (1)1.1引言 (1)1.2汽车巡航控制系统的历史背景和研究现状 (1)1.2.1巡航控制系统的历史背景 (1)l.2.2巡航控制系统的国内外研究和应用现状 (2)1.3巡航控制系统的发展趋势 (3)1.4课题来源及主要研究内容 (4)2巡航控制系统的组成和工作原理 (4)2.1巡航控制系统简介 (4)2.2汽车巡航控制系统的组成与工作原理 (6)2.2.1CCS的组成部件 (7)2.2.3CCS ECU (8)2.3巡航控制原理 (9)3巡航控制系统的建模仿真 (10)3.1采用模糊控制的原因 (10)3.2模糊控制的特点 (11)3.3模糊控制对汽车巡航控制系统的积极作用 (12)3.4模糊控制器的设计 (13)3.4.1定义输入语言变量 (13)3.4.2定义输出语言变量 (14)3.4.3提出模糊控制规则 (14)3.4.4规则表的建立 (16)3.5模糊PID控制系统的设计 (17)3.6模糊PID控制系统的软件仿真 (20)3.6.1MATLAB软件简介 (20)3.6.2SIMULINK简介 (21)3.6.3模糊逻辑仿真工具箱简介 (21)3.7仿真模型的建立 (22)3.7.1汽车动力仿真模型的建立 (22)3.7.2PID控制器仿真模型的建立 (23)3.7.3利用模糊逻辑工具箱建立模糊控制器 (24)3.7.4仿真结果分析 (30)结论 (33)参考文献 (35)谢词..........................................................................................错误!未定义书签。
基于Matlab和模糊PID的汽车巡航控制系统设计
基于Matlab和模糊PID的汽车巡航控制系统设计一、本文概述随着汽车工业的快速发展和智能驾驶技术的不断进步,汽车巡航控制系统作为提高驾驶安全性和舒适性的重要手段,越来越受到人们的关注。
传统的巡航控制系统主要依赖于PID(比例-积分-微分)控制算法,虽然在一定程度上能够实现车速的稳定控制,但在面对复杂多变的道路环境和驾驶员的个性化需求时,其性能往往难以达到最优。
为了解决这个问题,本文将研究并设计一种基于Matlab和模糊PID的汽车巡航控制系统。
该系统将结合传统PID控制算法的稳定性和模糊控制算法的灵活性,通过Matlab进行建模与仿真,实现对汽车巡航速度的更精确、更智能的控制。
本文将介绍汽车巡航控制系统的基本原理和PID控制算法的基本原理;详细阐述模糊PID控制算法的设计思路和实现方法;然后,通过Matlab进行仿真实验,验证所设计的模糊PID控制算法在汽车巡航控制系统中的有效性和优越性;对本文的研究成果进行总结,并展望未来的研究方向和应用前景。
本文的研究不仅有助于提升汽车巡航控制系统的性能,同时也为智能驾驶技术的发展提供了新的思路和方法。
二、汽车巡航控制系统概述汽车巡航控制系统是一种先进的驾驶辅助系统,旨在通过自动调节发动机的油门或制动系统,使车辆能够在驾驶员设定的速度下稳定行驶,而无需持续踩踏油门踏板。
这种系统不仅可以提高驾驶的舒适性,减少驾驶员的疲劳感,而且在长途驾驶或高速公路上行驶时,能有效提高行车安全性。
巡航控制系统的核心在于其控制策略,它需要根据车辆当前的速度、加速度、道路条件以及驾驶员的设定速度等多个因素,进行实时计算和判断,以决定如何调整发动机的输出或制动力度。
传统的PID (比例-积分-微分)控制器因其简单性和有效性,在巡航控制系统中得到了广泛应用。
然而,由于实际驾驶环境的复杂性和不确定性,传统的PID控制器往往难以应对各种突发情况,如突然出现的障碍物、道路坡度变化等。
为了解决这个问题,近年来,基于模糊逻辑的控制器被引入到汽车巡航控制系统中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于PID的汽车定速巡航控制系统的研究摘要:随着汽车工业和公路运输业的发展,汽车会越来越普及,人们将需要更加舒适、简便和安全的交通工具。
汽车巡航控制系统是一种辅助驾驶系统,它不但可以减轻驾驶员的负担,还可以提高驾车的舒适性。
汽车巡航控制系统具有非线性、时变不确定性,并受到外界扰动、复杂的运行工况等影响,采用传统PID控制很难取得满意的效果,本文介绍了一种基于模糊PID控制算法的汽车巡航控制系统。
本文首先阐述了汽车巡航控制系统的历史背景、在国内外的研究应用现状及其发展趋势,并详细介绍了巡航控制系统的构成。
通过对一种采用闭环控制的巡航控制系统进行分析,阐述了巡航控制系统的控制原理。
然后,本文对汽巡航控制系统进行了简要的分析,将模糊PID控制方法作为其控制方案,并设计出系统的模糊控制器。
以轿车为对象,分析了汽车在行驶过程中的驱动力及受到的各种阻力和干扰力,并建立起汽车纵向动力学模型。
利用MATLAB建立了系统的仿真模型,并对汽车巡航控制系统进行了仿真和分析。
由仿真结果可知,模糊PID控制方法能使系统相应的超调减小、反应速度加快、控制效果良好,是一种适用于汽车巡航控制系统的控制方法。
论文的内容是基于传统的汽车巡航控制系统,对现有的PID控制进行完善和优化。
发挥模糊控制的优势对现有的汽车巡航控制系统进行改进,令控制过程具有一定的智能水平。
有助于提高巡航控制的效果,减少车速变化,最大限度节省燃料,降低排气污染,提高发动机的使用效率,改善汽车动力性和乘坐舒适性。
最后利用MATLAB软件中的模糊逻辑工具箱对系统的设计进行仿真,验证系统设计的可行性,观察模糊控制的效果,并对部分基础电路进行设计。
通过仿真结果分析得出平均巡航响应时间加快了15.9秒,响应超调量平均减小了15.02%。
有助于模糊控制在汽车巡航系统中应用的普及。
关键词: 巡航控制系统; MATLAB; 模糊PID; 仿真Research on Automobile Cruise Control SystemBased on DSPAbstract:With the development of automobile industry and carrying trade,automobile will be more and more widespread.More comfortable,more convenient and safer vehicle will be needed.Automobile cruise control system,which not only could relieve the drivers’ burden but also could make the driving comfortable,is a kind of accessorial driving system.Cruise control system has high nonlinearity and non-determinacy with time changing.And CCS,which is effected by some factors such as external load disturbers and complicated running modes,will not have a good running effect with the traditional PID contr01.A kind of CCS which is based on Fuzzy PID control is introduced in the thesis.First,the background of cruise control system and its status and developing trend is expatiated on in the dissertation.The composing of CCS is also introduced in detail.The principium of CCS is described by analyzing a kind of closed loop system.After analyzing the cruise control system briefly, Fuzzy-PID is confirmed as the control method of the system.Then the Fuzzy PID controller is designed.As the object is a car, the thesis analyzes the resistances and disturbs while the car’s running.And the automobile dynamics model is given.After setting up the model by means of MATLAB,the result is analyzed.From the result,we may know that Fuzzy PID control could make the overshoot smaller and the response time shorter.The effect of Fuzzy PID method is given,SO it is a suitable method for CCS.Paper is based on the traditional automobile cruise control system, improved and optimized the PID control. Play to the advantages of fuzzy control to improve the existing vehicle cruise control system, so that the control process has some intelligence. Cruise control will help to improve the effectiveness and reduce the speed of change, the maximum fuel savings and reduce exhaust pollution, improveengine efficiency, improved vehicle power and comfort. Finally, use the Fuzzy Logic Toolbox in MATLAB software to simulate the design of the system, to verify the feasibility of the system design, observe the effect of fuzzy control, and design some basic circuit. By analysis the simulation results, the average cruise speed up response time of 15.9 seconds, average response overshoot reduced 15.02%. Help of fuzzy control application in the automobile cruise control system in popularity. Keywords:cruise control system ; MATLAB ; Fuzzy PID; simulation目录1 绪论 (1)1.1引言 (1)1.2汽车巡航控制系统的历史背景和研究现状 (1)1.2.1巡航控制系统的历史背景 (1)l.2.2巡航控制系统的国内外研究和应用现状 (2)1.3巡航控制系统的发展趋势 (3)1.4课题来源及主要研究内容 (4)2 巡航控制系统的组成和工作原理 (4)2.1巡航控制系统简介 (4)2.2汽车巡航控制系统的组成与工作原理 (6)2.2.1 CCS的组成部件 (7)2.2.3 CCS ECU (8)2.3巡航控制原理 (9)3 巡航控制系统的建模仿真 (10)3.1采用模糊控制的原因 (10)3.2模糊控制的特点 (11)3.3模糊控制对汽车巡航控制系统的积极作用 (12)3.4模糊控制器的设计 (13)3.4.1 定义输入语言变量 (13)3.4.2 定义输出语言变量 (14)3.4.3 提出模糊控制规则 (14)3.4.4 规则表的建立 (16)3.5模糊PID控制系统的设计 (17)3.6模糊PID控制系统的软件仿真 (20)3.6.1 MATLAB软件简介 (20)3.6.2 SIMULINK简介 (21)3.6.3 模糊逻辑仿真工具箱简介 (21)3.7仿真模型的建立 (22)3.7.1 汽车动力仿真模型的建立 (22)3.7.2 PID控制器仿真模型的建立 (23)3.7.3 利用模糊逻辑工具箱建立模糊控制器 (24)3.7.4 仿真结果分析 (30)结论 (33)参考文献 (35)谢词............................................ 错误!未定义书签。
1 绪论1.1 引言随着汽车工业和公路运输业的发展,汽车将走进千家万户,驾驶人员非职业化的特点将突出,车辆驾驶的自动化己成为汽车发展的主要趋势。
跨入二十一世纪,人们需要更加舒适、简便和安全的交通工具,以适应快捷的生活节奏,因此对汽车的智能化要求更加迫切,随着计算机和电子技术的不断发展,性价比不断提高,为汽车的自动化提供了雄厚的物质基础,汽车实现智能化已不是梦想。
车辆自动变速器及其控制技术是智能汽车非常重要的内容。
是汽车辅助驾驶系统和自动驾驶系统的基础,是目前我国智能汽车发展必须解决的核心技术之一。
此外,随着我国高速公路网建设纵横迅速延伸,自动巡航控制也具备了广泛的发展和应用前景。
科技的发展使相应电子技术在汽车上应用得越来越广泛,汽车电子化程度越来越高,特别是微控制器进入汽车控制领域后,给汽车发展带来了划时代的变化,汽车的动力性、操作稳定性、安全性、燃油经济性、对环境的友好性都得到了大幅提升。
在大陆型国家,驾驶汽车长途行驶的机会较多,而且在高速公路上行驶时变换车速的频率及范围都较少,能以较稳定的车速行驶。