CBF 基本联机调试
北京利达LDEII主机调试说明

北京利达LDEII主机调试说明JB-QG-LD128E Ⅱ火灾报警控制器(联动型)调试手册(VER 1.12版本)版本说明:本版是配合LD128EⅡ火灾报警控制器(联动型)的调试而使用,控制器软硬件都根据调试和使用的实际情况作了相应的升级。
本版调试手册适用于LD128EⅡ监控软件和POT设置软件2.0版本。
本版对工程调试进行了更详尽的说明。
希望调试人员对新增加和修改部分仔细阅读,并及时反馈信息。
注意:请不要对控制器进行查毒操作!第一节系统简介JB-QG-LD128E Ⅱ火灾报警控制器(联动型)(以下简称LD128EⅡ)依据国标《GB4717-93》以及《GB16806-1997》设计,并通过了上述两个标准的检测。
LD128EⅡ采用对等网络架构设计,所有内部部件和外部扩展均通过CAN(Control Area Network)Bus网络完成,均是网络上的一个节点,通讯可靠,扩展方便。
内部部件由以下部分组成:一、主控部分采用嵌入式工业计算机,保证系统在满足设备技术条件的环境下长时间稳定工作,以及配合显示的器件、存储的器件、输入、打印等器件。
1、主板(编号:LD128E-E-C00-XXX)2、多功能板(编号:LD128E-E-C01-XXX)3、液晶(编号:LD128E-E-C02-XXX)4、打印机(编号:LD128E-E-C07-XXX)5、液晶升压板(编号:LD128E-E-C08-XXX)6、驱动板(编号:LD128E-E-D00-XXX)7、触摸屏二、驱动部分由1至16块驱动板组成,每个驱动板可输出4个探测回路。
每个回路可连接256(0-255)个总线设备(探测器、手报、输入输出模块、楼层显示器等)。
在一台机器内部最多可接16块驱动板(编号:LD128E-E-D00- XXX),总线设备表示为:X X —XXX地址号(000-255)回路号(00-31)总线设备可以为以下几种方式:1、报警类:包括感烟、感温探测器、手报按钮、输入模块等。
ABB CBF功能块之七
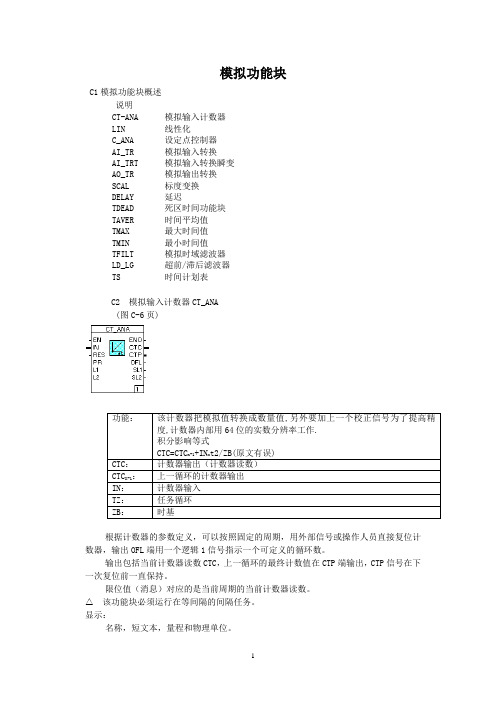
模拟功能块C1模拟功能块概述说明CT-ANA 模拟输入计数器LIN 线性化C_ANA 设定点控制器AI_TR 模拟输入转换AI_TRT 模拟输入转换瞬变AO_TR 模拟输出转换SCAL 标度变换DELAY 延迟TDEAD 死区时间功能块TAVER 时间平均值TMAX 最大时间值TMIN 最小时间值TFILT 模拟时域滤波器LD_LG 超前/滞后滤波器TS 时间计划表C2 模拟输入计数器CT_ANA(图C-6页)根据计数器的参数定义,可以按照固定的周期,用外部信号或操作人员直接复位计数器,输出OFL端用一个逻辑1信号指示一个可定义的循环数。
输出包括当前计数器读数CTC,上一循环的最终计数值在CTP端输出,CTP信号在下一次复位前一直保持。
限位值(消息)对应的是当前周期的当前计数器读数。
该功能块必须运行在等间隔的间隔任务。
显示:名称,短文本,量程和物理单位。
计数器当前读数CA(引脚CTC),上一周期计数器读数CP(引脚CTP)。
基值BV(引脚PR)显示为数字值。
当前计数器读数CTC和上一周期计数器读数CTP还显示为条状图。
限位值L1和L2显示为数字值,标识在相应的显示条中。
如果配置为可以复位,则显示复位按钮。
操作说明:可以改变基值BV(引脚PR)和限位值L1、L2(引脚L1、L2),可以配置计数器是否允许复位。
消息确认C2.1 参数:模拟输入计数器CT_ANA(图C-7页)Scale start: 零点,以实数形式输入Scale end: 量程,以实数形式输入Dimension: 物理单位,以文本形式输入或从列表中选择Reset counter by: (用什么复位计数器):Reseting value: 超过定义的最大允许值时复位如果输入为空白,复位值则无效.调试时显示值为0.0,该值不能改变Period duration: 经过一人固定周期时间复位,如T#2h(2小时复位一次).如果输入为空白,则周期无效,即永远运行。
CBF入门手册

工程师IT Control Builder F入门手册第 9.1版工程师IT Control Builder F入门手册第 9.1版注:本文档中的信息如有更改,恕不另行通知。
同时,对本协议信息的解释不在ABB 的职责范围内。
ABB对于本协议中可能出现的错误概不负责。
在任何情况下,ABB对于因本文件使用导致的任何性质或种类的直接、间接、附带或者相关损害不负责任。
同时,因本文件描述的任何软件或硬件的使用而导致的附带或相关损害,ABB也概不负责。
本文件以及文件的各部分在未征得ABB书面许可前不得进行复制,而文件涉及的内容不得透露给第三方或者用于未经授权的目的。
本文件描述的软件或者硬件必须经相关许可证授权,并应根据此类许可证的条款进行使用、复制或者披露。
本产品符合《EMC指令89/336/EEC》以及《低压指令72/23/EEC》规定的要求。
版权 © 2008ABB.保留所有权利发布时间:2008年7月文件编号:3BDD012560R0303商标:所有版权及商标归各自的所有者所有。
目录本书说明 (8)使用警告,注意,信息和提示图标 (8)排版公约 (8)专用术语 (8)相关文档 (8)第一章授权 (11)介绍 (11)Engineer IT – Control Builder F (11)Control Builder F 标准版 (11)Control Builder F 专业版 (12)Freelance 800F过程站的Control IT授权 (12)基本控制软件授权 (12)高级控制软件授权 (13)高级控制软件的附加选项: (13)使用I/O授权 (13)升级先前的软件版本 (14)FreeLance 800F的软件管理程序自动化哨兵升级 (15)第二章 Freelance 800F 安装 (16)概述 (16)Freelance 800F 技术在支持 (16)推荐PC组态 (16)产品选项 (17)选项和附加模块 (17)硬键钥匙 (17)Freelance 800F 软件首次安装 (19)安装核对表 (19)Windows XP完全安装 (19)网络和IP地址设置 (20)Windows XP 中的FTP 服务器 (21)虚拟内存大小 (22)禁止自动升级 (22)防病毒程序设置 (22)现有版本升级到新版本 (22)执行版本升级前的注意事项 (22)新版本安装之前的卸载 (23)启动安装 (23)安装Freelance 800F软件 (24)选择安装类型 (26)演示模式 (27)生产模式 (28)自定义模式 (29)从先前的版本导入数据 (32)修改模式 (34)修改选项 (34)修订选项 (36)删除选项 (36)修改安装 (36)常规设置 (37)Control Builder F的设置 (39)Digvis设置 (42)DigiBrowse设置 (43)DDE设置 (43)OPC Server 800F设置 (43)Trend Server 800F设置 (45)安装完成 (48)使用Check来检查安装 (49)Freelance 800F的DCOM组态 (50)所有工作站的重要基本组态 (50)组态CBF和DigiVis 站 (60)建立OPC或趋势服务器 (68)第三章初始步骤 (72)概括说明 (72)创建项目文件 (72)第一步:组态项目软件视窗 (72)第二步:组态硬件分配 (75)第三步:联机调试 (76)第四步:测试组态 (76)第五步:保存项目数据 (77)第六部:组态操作员站 (77)第七步:调试操作站 (77)使用警告,注意,信息和提示图标本书说明本书说明使用警告,注意,信息和提示图标该出版物包含了警告,注意,和信息,在这些地方适当地指出相关安全性和其它重要信息。
和利时电机SYNTRON森创产品说明书

版权申明SYNTRON森创®是北京和利时电机公司(以下简称和利时电机)于2005年推出的产品品牌。
这个品牌浓缩了公司的核心技术和影响力,是公司始终注重自主创新,保持技术优势的体现。
说明书的内容参照了相关法律基准和行业基准。
如对本说明书提供的内容有疑问,请向销售人员咨询,致电客服热线,联系官网客服或致信本公司。
和利时电机保留在不事先通知的情况下,修改本手册中的产品和产品规格参数等权力。
手册请联系销售人员,或在和利时电机的官方网站下载相关手册。
和利时电机具有本产品及其软件的专利权、版权和其它知识产权。
未经授权,不得直接或者间接地复制、制造、加工、使用本产品及其相关部分。
和利时电机具有本使用说明书的著作权,未经许可,不得修改、复制使用说明书的全部或部分内容。
安全有关的符号说明本说明书中与安全有关的内容,使用了下述符号。
标注了安全符号的都为重要内容,请安全注意事项安全注意事项目录 第一章产品概况 ................................................... - 1 -1.1产品概况 ................................................................................................................................ - 1 -1.1.1简介 ........................................................................................................................... - 1 -1.1.2低压伺服驱动器型号命名 ....................................................................................... - 3 -1.1.3低压伺服一体机型号命名 ....................................................................................... - 3 -1.1.4规格和性能 ............................................................................................................... - 4 -1.1.5电机配套 ................................................................................................................... - 4 -1.1.6产品构造 ................................................................................................................... - 5 -1.1.7安装尺寸 ................................................................................................................... - 5 - 第二章准备 ...................................................... - 12 -2.1通讯协议及软件 .................................................................................................................. - 12 -2.2操作面板 .............................................................................................................................. - 13 -2.2.1操作面板介绍 .........................................................................................................- 13 -2.2.2指示灯介绍 .............................................................................................................- 13 -2.2.3数码管 .....................................................................................................................- 13 -2.2.4按键 .........................................................................................................................- 14 -2.2.5键盘操作流程 .........................................................................................................- 15 - 第三章配线 ...................................................... - 16 -3.1接线总图 .............................................................................................................................. - 16 -3.2接线定义 .............................................................................................................................. - 17 -3.2.1 LS-10520M2系列接线定义 ..................................................................................- 17 -3.2.2 LS-10530BA系列接线定义 ..................................................................................- 18 -3.2.3 LS-10530BK系列接线定义 ..................................................................................- 19 -3.2.4 LS-10530D5系列接线定义...................................................................................- 20 -3.2.5 LS-10540D/LS-10550D系列接线定义................................................................- 21 -3.2.6 LS-20530DG系列接线定义..................................................................................- 22 -3.2.7 LS-20520E系列接线定义 .....................................................................................- 23 -3.2.8 LS-20530E / LS-20535E系列接线定义..............................................................- 25 -3.2.9 LS-20540E系列接线定义 .....................................................................................- 27 -3.2.10 DM一体机系列接线(驱动器后置一体机).....................................................- 29 -3.2.11 SM一体机系列接线(驱动器侧背一体机) .....................................................- 29 -3.2.11.1类型1 ....................................................................................................................- 29 -3.2.11.2类型2 ....................................................................................................................- 32 -3.3其他接线说明 ...................................................................................................................... - 33 -3.3.1 地线连接..................................................................................................................- 33 -目录3.3.2 编码器差分输出接线 ..............................................................................................- 33 -3.3.3 数字输入接线 ..........................................................................................................- 33 -3.3.4 数字输出接线 ..........................................................................................................- 33 -3.3.5 手动控制制动器接线 ..............................................................................................- 34 -3.3.6 位置模式接线 ..........................................................................................................- 34 -3.3.7 内部速度模式接线 ..................................................................................................- 35 -3.3.8 外部速度/转矩模式接线图 .....................................................................................- 35 - 第四章设定 ...................................................... - 36 -4.1电机方向 .............................................................................................................................. - 36 -4.2状态参数 .............................................................................................................................. - 36 -4.3功能参数 .............................................................................................................................. - 37 -4.3.1工作控制模式 .........................................................................................................- 37 -4.3.2系统基本参数控制 .................................................................................................- 37 -4.3.3数字输入端口 .........................................................................................................- 38 -4.3.4内部控制信号 .........................................................................................................- 38 -4.3.5数字输出端口 .........................................................................................................- 41 -4.3.6脉冲端口输入输出 .................................................................................................- 41 -4.3.7目标到达状态判断 .................................................................................................- 42 -4.3.8位置环控制参数 .....................................................................................................- 43 -4.3.9模拟量输入参数 .....................................................................................................- 44 -4.3.10内部速度参数 .........................................................................................................- 45 -4.3.11速度环调节参数 .....................................................................................................- 45 -4.3.12转矩电流指令滤波参数 .........................................................................................- 45 -4.3.13控制限制参数 .........................................................................................................- 46 -4.3.14增益切换 .................................................................................................................- 47 -4.3.15速度模式加减速时间 .............................................................................................- 48 -4.3.16电磁制动器 .............................................................................................................- 48 -4.3.17报警保护配置 .........................................................................................................- 48 -4.3.18通讯参数设置 .........................................................................................................- 50 -4.3.19电流环控制参数 .....................................................................................................- 51 -4.3.20泄放参数配置 .........................................................................................................- 51 -4.3.21历史报警码 .............................................................................................................- 52 -4.4试运行 .................................................................................................................................. - 52 -4.4.1基本流程 .................................................................................................................- 52 -4.4.2JOG模式空载试运行(键盘面板上操作) ........................................................- 54 -4.4.3速度模式空载试运行(总线通讯操作) .............................................................- 54 -目录 第五章调整 ...................................................... - 55 -5.1控制模式的选择 .................................................................................................................. - 55 -5.2输入输出的配置 .................................................................................................................. - 56 -5.2.1输入信号端口分配 .................................................................................................- 56 -5.2.2输出信号端口分配 .................................................................................................- 57 -5.3基本参数 .............................................................................................................................. - 58 -5.3.1伺服使能 .................................................................................................................- 58 -5.3.2急停 .........................................................................................................................- 58 -5.3.3指令取反 .................................................................................................................- 58 -5.3.4零速到达 .................................................................................................................- 59 -5.3.5目标速度到达 .........................................................................................................- 59 -5.3.6速度一致 .................................................................................................................- 59 -5.3.7目标转矩到达 .........................................................................................................- 59 -5.3.8超程 .........................................................................................................................- 60 -5.3.9恢复出厂默认参数 .................................................................................................- 60 -5.4位置模式调整 ...................................................................................................................... - 61 -5.4.1脉冲指令方式的选择 .............................................................................................- 61 -5.4.2脉冲指令窗口滤波器 .............................................................................................- 61 -5.4.3脉冲指令平滑滤波器 .............................................................................................- 62 -5.4.4指令脉冲禁止功能 .................................................................................................- 62 -5.4.5电子齿轮的设定 .....................................................................................................- 62 -5.4.6位置到达信号 .........................................................................................................- 65 -5.4.7位置接近信号 .........................................................................................................- 65 -5.4.8位置超差警告 .........................................................................................................- 66 -5.4.9位置脉冲误差清零 .................................................................................................- 66 -5.5速度模式调整 ...................................................................................................................... - 66 -5.5.1外部模拟量速度模式运行 .....................................................................................- 66 -5.5.2内部速度模式运行 .................................................................................................- 67 -5.5.3加减速时间 .............................................................................................................- 68 -5.5.4零速给定 .................................................................................................................- 69 -5.6转矩模式调整 ...................................................................................................................... - 69 -5.6.1转矩指令增益的调整 .............................................................................................- 69 -5.6.2转矩指令偏移量的调整 .........................................................................................- 69 -5.6.3转矩指令方向的设置 .............................................................................................- 69 -5.6.4转矩指令低通滤波器 .............................................................................................- 69 -5.6.5模拟转矩指令零值箝位 .........................................................................................- 70 -目录5.6.6转矩控制时的速度限制 .........................................................................................- 70 -5.7共振抑制 .............................................................................................................................. - 71 -5.8转矩限制 .............................................................................................................................. - 72 -5.9增益切换 .............................................................................................................................. - 73 -5.10增益调整 .............................................................................................................................. - 75 -5.10.1速度环增益调整 .....................................................................................................- 75 -5.10.2位置环增益调整 .....................................................................................................- 75 -5.10.3增益调整注意事项 .................................................................................................- 75 -5.11电磁制动 .............................................................................................................................. - 76 -5.12编码器的输出 ...................................................................................................................... - 77 -5.13干扰对策 .............................................................................................................................. - 77 -第六章通讯 ...................................................... - 79 -6.1Modbus总线设置 ................................................................................................................ - 79 -6.2CAN总线设置..................................................................................................................... - 79 -6.3通讯协议 .............................................................................................................................. - 79 -第七章故障警告及处理 ............................................ - 80 -7.1报警代码 .............................................................................................................................. - 80 -7.2报警状态指示灯 .................................................................................................................. - 83 -7.3性能异常及解决办法 .......................................................................................................... - 83 -第八章维护与保养 ................................................ - 84 -8.1伺服电机的检查 .................................................................................................................. - 84 -8.2伺服驱动器的检查 .............................................................................................................. - 84 -产品概况第一章产品概况1.1 产品概况1.1.1 简介LS系列低压伺服驱动器(以下简称LS驱动器),是和利时电机根据市场需求推出的新一代高性能、高可靠产品。
S7-300-400联机调试使用说明

最小安 装
改变安 装的路
径
定义STEP7 V5.2安装路径
指明安 装路径
点击 OK
选择安装帮助文档的内容
一般默认值为英 语,不用可将其
左端小沟去掉
可选的 语言有 如图的 几种, 选择其 中一种 或几种 打勾
选择下一步 进入下一步
安装
选中要添加的从站设备,双击就可添加入网络中。
双击鼠标弹 出网络配置
窗体
图标即为 选择
从站 站号
点击OK
配置从站的数据传输方式技术定义
展开从站选 择通讯方式 将要使用的通讯方 式拖到图示位置
若从站设备在设备区没有可通过添加设备的GSD文件 来增加设备,如下面窗体所示:
5. 联机调试 下面我们将主要介绍绍怎样进行与PLC联机,上
下载程序及其联机调试的知识。
要进行与PLC联机可以有几种方法,由于上面提 到的我们采用的为PC Adapter 现在我们将主要从这 个方面介绍:
采用PC Adapter,首先需要将PC Adapter 与 PLC和安装有Step7 的计算机连接起来,由于在PC Adapter 与计算机连接端的接口不能直接到计算机 上,因此我们需要自己制作一根连接电缆,电缆的长 度必须小于15米,且为多芯屏蔽线,线的芯数只要不 小于 7芯即可。
若使用向导我们可点击Next,进入向导使 用。否则可点接击Finish,直接进入程序。
出现向导画面,可按引导选择CPU型号及 其名称,MPI地址
MPI的地 址
可选的 CPU的型
号
CPU的 名称
点击 Next
此窗体中将显示OB块选择,编程方式及其是否 创建源文件(用于高级编程)
ABB CBF功能块之五

开关量功能块D2 二进制输出,M-BOUT〈图D6〉功能:用于安排一个二进制输出的设置,允许工作在手动方式或自动方式。
在手动方式,输出由操作员控制。
在自动方式,输出由输入信号控制。
如果手动方式和自动方式同时使用,则手动优先。
机器用一个SMA输出信号指示当前的工作方式为手动(逻辑0信号)还是自动(逻辑1信号)。
显示:名称,很短的文字说明,用M和A表示工作方式,另外还显示状态说明。
该功能有一个小面板。
操作说明:操作员可以用按钮M和A完成手动/自动以及自动/手动工作方式之间的相互转换。
在手动方式时,操作员可以用按钮0/1控制输出。
D2.1参数:二进制输出M-BOUT。
〈图7〉工作方式〈OPERA TING MODE〉MANUAL ●启动手动工作方式AUTOMA TCI ●启动自动工作方式LOCK MANUAL ☑不允许转换到手动方式☐可以转换到手动方式LOCK AUTOMA T ☑不允许转换到自动方式☐可以转换到手动方式显示文字〈DISPLAY TEXT FOR 〉状态1 显示二进制信号1的说明,该说明可以直接输入或通过选择窗口输入状态0 显示二进制信号0的说明,该说明可以直接输入或通过选择窗口输入初始设置〈UITIAL SETTICGDS〉手动工作方式启动时输出为:〈MAUUAL V ALUE OUT〉设置为逻辑-1设置为逻辑-0手动值的可访问性能在手动工作方式可以改变输出值不允许操作员改变输出值D3 单稳振器,MONO-F<图D-9>.功能:功能块产生一个二进制输出信号,信号的持续时间可以配置.二进制信号的上沿或下降作为去发信号.RES 是一个复信号,可以提前复输出信号。
在输出端TS可以查询脉冲宽度,在TC端可以查询信号为纸的时间。
OUT端输出为逻辑1时可以生成一个消息。
(图D-9)显示:名称,文字,脉冲持续时间DT(端子TS)和纸电子时间TC(端子TC),以及Reset(复位).操作说明:可以改变脉冲宽度(在有效量程范围内),可以复位(OUT端设置为0)消息确认。
CBF收银机操作说明
CBF收银机操作说明cbf-7000触摸屏餐饮系列说明书版本202110[1]目录第一章硬件安装说明1.1产品清单。
11.2收银机接口说明。
11.2安装和接线细节。
21.4安装和测试。
2第二章销售前台2.1前台登陆…………………………………………………………………………………………………………………..32.2日常流程介绍…………………………………………………………………………………………………………..32.2.1点菜流程…………………………………………………………………………………………………………….32.2.2点菜/消单流程…………………………………………………………………………………………………..52.2.3外卖流程…………………………………………………………………………………………………………….52.2.4收银交款…………………………………………………………………………………………………………….82.2.5交款对账…………………………………………………………………………………………………………….82.3系统参数设置2.3.1 POS机的参数设置。
102.3.2一般设置参数。
112.3.3标签打印设观设置。
122.3.5高级设置。
132.3.6账单设置。
142.3.7页眉和页脚的设置。
152.3.8机组维护。
152.3.9打印机方案设置……………………………………………………。
152.3.10项目厨房打印设置152.4订购界面的参数设置2.4.1功能显示设置…………………………………………………………………………………………………….162.4.2界面布局设置…………………………………………………………………………………………………….16第三章收银机后台3.1前台管理。
173.1.1考勤管理173.1.2员工通勤管理173前台。
3 173.1.4营业日结束173.1.5销售流程173.1.6收银机流程183.1.7前台业务参数和账单设置183.1.8客户管理183.1.9系统参数183.2基础数据3.2.1大类设置..............................................................................................................................193.2.2小类设置..............................................................................................................................193.2.3品项设置 (19)3.2.4装置设置。
消防核中警HJ9000调试指导书
消防核中警HJ9000调试指导书【消防核中警HJ9000调试指导书】一、引言消防核中警HJ9000是一款先进的消防报警系统,具备高度灵敏的监测和报警功能,广泛应用于各类建造物和场所。
本指导书旨在提供HJ9000调试的详细步骤和注意事项,确保系统的正常运行。
二、调试前准备1. 确认安装环境:检查HJ9000的安装位置是否符合要求,避免干扰和遮挡。
2. 确认供电情况:检查系统的电源是否正常,确保供电稳定。
3. 确认设备连接:检查各个传感器和控制器的连接是否坚固,避免信号传输中断。
4. 准备调试工具:准备好调试所需的计算机、数据线和调试软件。
三、调试步骤1. 启动系统:按照HJ9000的启动流程,将系统连接电源,并等待系统启动完成。
2. 进入调试模式:使用调试软件登录系统管理界面,进入调试模式。
3. 检查传感器:逐一检查各个传感器的连接情况,确保传感器正常工作。
可通过调试软件查看传感器的状态和数据。
4. 校准传感器:根据实际情况,对传感器进行校准,确保传感器的灵敏度和准确性。
5. 配置报警参数:根据建造物的特点和需求,设置合适的报警参数,包括报警阈值、报警延时等。
6. 测试报警功能:通过摹拟火灾等突发事件,测试报警功能是否正常,确保报警信号能够准确传输和触发。
7. 调试联动控制:对联动控制设备(如喷淋系统、排烟系统)进行调试,确保其能够与HJ9000系统正常联动。
8. 检查报警记录:查看系统的报警记录,确认系统的报警记录功能正常运行,并能够提供准确的报警信息。
四、调试注意事项1. 安全第一:在调试过程中,要注意遵守安全操作规程,确保自身和他人的安全。
2. 严格按照操作手册进行:在调试过程中,要严格按照操作手册和指导书的要求进行操作,避免误操作导致系统故障。
3. 注意数据保护:在调试过程中产生的数据,要做好备份和保护工作,以防数据丢失或者泄露。
4. 及时记录调试过程:在调试过程中,要及时记录调试的步骤和结果,以备后续参考和分析。
ABB程序设计AC800F9.2趋势服务器设置
AC800F9.2趋势设置
AC800F9.2的趋势设置较以前的版本有很大的改进。
设置上变的容易的多,具体设置步骤如下:
一、 安装:
安装时要特别注意,不要安装Bulk Data Manager这个选项,如果安装有可能在检查时出现‘达到编译极限’的错误。
二、 系统设置:
本版本的设置比较简单,像9.1版本的通一所有机器的用户名和密码以及其它的一些关于Windows的设置都不是必要的。
三、 组态:
同其它版本一样,在项目树中插入一个网关,并将网关类型设定的为‘TRN-网关’设定一个端口号并记住本号。
在想作为趋势服务器的计算机中进行Configer设置,将上面组态的‘TRN-网关’的ID 设定进去。
在OPC tunl 的Configurtor中进行如下设置,Tunnel即是‘TRN-网关’中所设定的端口号;DA Server的填写如下图,最后数字为‘TRN-网关’的ID。
在服务器机器上开启Trend-Server和System Tray;。
VIS上不需要任何设置,如果联不上可以重新启动VIS,或是重新启动计算机。
如果还是联不上哪么在CBF程序中联机调试后检查“设定系统时间”或是在服务器上如上图重启服务。
山东恒拓科技发展有限公司
王汝强
2010-12-20
米东天山水泥电石渣项目调试现场。
EAW音频处理器DX1208联机调试步骤
3、单击 Add 按钮添加到设备 IP 地址列表 4、单击 OK 回到(图 1)界面
(图 2)
3) 将电脑的 IP 地址设置为 192.168.1.102 或者自定义为与指定目标同一网 段的 IP 地址(图 3)。
如左图设定好后单击“确定”退 出
(图 3) 4) 连接设备(用两条 568-B 类网线分别连接 PC 和 DX1208 设备到
交换机)(图 4)
IP:192.168.1.101 CAT-5
CAT-5
图4
IP:192.168.1.102
5) 回到图 1 界面单击 “Go Online”,系统搜索目标设备,搜索到 设备后便成。(图 5)
√
图5 二、调试 6) 双击图 5 中的“DX1208”,打开如下控制界面。(图 6)
输入 菜单
输入通道选择
输入通道滤 波器调节
为通道命名
旁通与恢复 滤波器
静音 按键
幻象电源 开关
信号优先
级调节
图6
门限器调节 压缩器调节
独奏按键
7) 信号优先级调节(根据需要进行调节,做普通混音不需此步骤) 图7
优先级菜 单
图8
9) 输出通道参数调节。图 9输出菜单输出道选择输入通道滤 波器调节
为通道命名
旁通与恢复 滤波器
通道延时调 节
图9
限幅器调节
10) 多台 DX1208 联机后数字信号传输控制(如只有 1 台 DX1208 则 无需此步)图 10
DXLINK 菜单
控制所有的数字输入和数 字输出通道的电平和静音
图6输入通道选择输入通道滤波器调节旁通与恢复滤波器门限器调节压缩器调节信号优先级调节为通道命名幻象电源开关输入菜单静音按键独奏按键不同级别的电平差限幅器调节本机输入通道优先级调节联机系统内其他dx1208的数字输出到本机的数字输入通道优先级调节本机输出通道选择本机数字输出到系统联机的其他dx1208的通道选择自动混音输出菜单选择相应的输入通道到相应的输出通道enable为激活该通道输出通道选择输出菜单输入通道滤波器调节旁通与恢复滤波器限幅器调节为通道命名通道延时调10多台dx1208联机后数字信号传输控制如只有1台dx1208无需此步图10图10dxlink菜单控制所有的数字输入和数字输出通道的电平和静音11逻辑输出输出控制根据需要配置逻辑控制如没有相应需要则无需此步图11