KRC启动时序说明
acs系列交通信号控制机用户手册
交通信号控制机用户手册
用户安全使用注意事项
1.概述
本 手 册 的 使 用 对 象 是 具 有 资 格 安 装 、操 作 和 维 护 交 通 信 号 控 制 机 的技术人员。其内容包括正确使用信号控制机的所有的必要信息。 当然,为了更好地使用我们的产品,请您仔细阅读本说明书,以免 由于错误操作而引起设备损坏。
联系方式 浙江中控电子技术有限公司 地址:杭州市滨江区六和路 309#中控科技园 邮 编 : 310053 电 话 : 0571-86667999 传 真 : 0571-86667816 网站:
2
ACS 系列交通信号控制机用户手册
目录
1.概述.............................................................................................................................................1 2.合格用户.....................................................................................................................................1 3.应用的一致性...........................................................................................错误!未定义书签。 4.安装和启动装置.........................................................................................................................2 5.操作装置...................................................................................................错误!未定义书签。 6.预防性维护或设备保养...........................................................................错误!未定义书签。 目录 ..................................................................................................................................................3 第一章 产品介绍.............................................................................................................................5
Control4 IC Realtime 快速启动指南说明书

[ This note applies to all integration approved IC Realtimeequipment including recorders and cameras][ 2-Dec-16]ContentsMaterials needed (1)Overview (1)C4 Composer & IC Realtime Setup (2)Troubleshooting (5)Materials neededIC RealtimeDVR / NVR / IPC / IP PTZ Cat5/6 cable Laptop w/ a RJ-45 NIC port VGA/HDMI monitor OverviewThis aim of this guide is to cover the integration of IC Realtime equipment into the Control4 automated home using the Composer software. For general integration settings and troubleshooting techniques, please refer to theQsG_General-Integration-Guide.pdf.C4 Composer & IC Realtime SetupStep 1: First the home automation system requirements need to be considered. Either H.264 or MJPG are available from the IC Realtime equipment. As of this writing, Control4 is capable of utilizing either theH.264 or MJPG streams depending on the C4 hardware.With that in mind, the IC Realtime equipment will need to be setup first. The 2nd stream (or extra stream)is configured to use the preferred settings per format (H.264(~2Mb) or MJPG(D1, 5fps, ~2Mb)).For a more detailed setup on configuring the IC Realtime equipment and troubleshooting tips, please seethe QsG_General-Integration-Guide.pdfStep 2: Launch Composer. To add the IC Realtime driver set to the Composer library, select “Driver”then “Add or Update Driver …”. Navigate to the IC Realtime Control4 driver set and add each .c4i file (6 total).The Different Drivers:IC Realtime IP Camera (Fixed) – Video & snapshots for fixed IC Realtime IPCsIC Realtime IP Camera (PTZ) – Video, snapshot, and control for IC Realtime IPC PTZsIC Realtime Camera LED Switch – IR LED control for any IC Realtime cameraIC Realtime NVR Navigator – Control over an IC Realtime recorderIC Realtime NVR (Fixed) - Video & snapshots for fixed IC Realtime analog camerasIC Realtime NVR (PTZ) - Video, snapshot, and control for IC Realtime analog PTZ camerasStep 3: To confirm that the drivers are loaded, in the top right corner click on search. In the search box, type IC and hit enter. Right click on the driver and select info to find the version and date information.Step 4: Next, select the driver that corresponds to the IC Realtime equipment and drag it to the desired location in the “System Design” pane. You will be prompted to name the new driver instance.Then fill in the fields under the “Camera Properties” tab. We suggest setting the username / passwordfirst and the IP field last. After each field, you must click on the corresponding “Set” button.Step 5: Once the fields are set, click on the “Camera Test” tab. T he snapshot, MJPG, and H.264 URLs / streams are listed and testable.Step 6: The “Advanced Properties” section contains a collection of settings pulled from the camera/recorder with only a few exceptions. The PTZ speed/timing are locally storage and used to construct thecommand strings. Generally, we would suggest settings the different options in the camera’s /recorder’s interface.Notable fields include:“Load Optimized Defaults” –select “Load” and the cameras extra stream settings will be loaded withthe recommended settings for MJPG integration (D1 5fps 2Mb & optimized for MJPG).“H.264 Stream Selector” –Choose between “Main” or “Extra” for the H.264 Stream source.Troubleshooting∙To test the command strings (or variations), under the “Advanced Properties” section, set the “Debug” field to “Yes” and click “Set”. Now cli ck on the “Lua” tab. From here you can see the commands being sent and sen d commands to test.∙Ensure that the IP address, port #s, and username/password fields are correctly filled in with accurate information.∙Ensure that the Composer Software & drivers are up-to-date.∙If the main stream changes, ensure that the IC Realtime equipment meets the minimum firmware requirements for integration.∙If failing to get an image or getting a poor image, ensure that the IC Realtime ENCODE settings are correctly set.∙If experiencing control issues, ensure controls are functional at the IC Realtime device.For a more detailed setup on configuring the IC Realtime equipment and troubleshooting tips, please see theQsG_General-Integration-Guide.pdfIC Realtime LLC3050 N Andrews Avenue Extension | Pompano Beach, FL 33064 | (866) 997-9009Designs and specifications subject to change without notice. Copyright © 2015 IC Realtime, LLC. All rights reserved.。
Kramer SL-240C 快速启动指南说明书
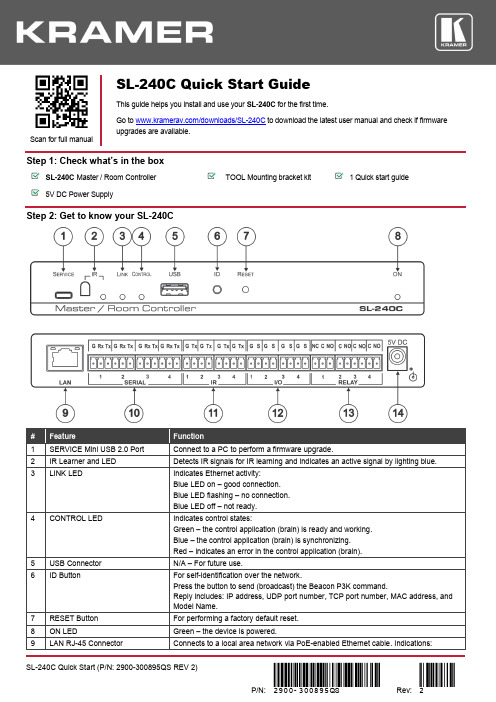
SL-240C Quick Start (P/N: 2900-300895QS REV 2)P/N:Scan for full manualSL-240C Quick Start GuideThis guide helps you install and use your SL-240C for the first time.Go to /downloads/SL-240C to download the latest user manual and check if firmware upgrades are available. Step 1: Check what’s in the boxSL-240C Master / Room ControllerTOOL Mounting bracket kit1 Quick start guide5V DC Power SupplyStep 2: Get to know your SL-240CStep 3: Install the SL-240CInstall SL-240C using one of the following methods:∙ Fasten a bracket (included) on each side of the unit and attach it to a flat surface.For more information go to /downloads/SL-240C .∙ Mount the unit in a rack using an optional RK-T2B rack adapter.Step 4: Connect the inputs and outputsAlways switch OFF the power on each device before connecting it to your SL-240C . For best results, we recommend that you always use Kramer high-performance cables to connect AV equipment to the SL-240C .Step 5: Connect the powerConnect to a local area network via PoE-enabled Ethernet cable or, optionally, connect the 5V DC power supply to the SL-240C and plug the power supply into the mains electricity.Safety InstructionsCaution: There are no operator serviceable parts inside the unit.Warning: Use only the Kramer Electronics power supply that is provided with the unit.Warning: Disconnect the power and unplug the unit from the wall before installing.See for updated safety information. .。
库卡KRC4机器人启动时序说明
KUKAKRC4门盖线启动时序说明机器人启动时序如下图此情况为正常启动KRC时时序图:详细时序介绍如下首先$EXT_START机器人启动信号开始前,首先机器人需要满足的启动条件有:ROBÆPLC信号:$USER_SAF(机器人用户安全信号) 为高电平、$ALARM_STOP(机器人急停正常)为高电平;PLCÆROB信号:$DRIVES_OFF(伺服准备,伺服上电前必须为1)为高电平、$MOVE_ENABLE:机器人运动使能为高电平;当这些信号满足后,PLC紧接着给机器人伺服上电命令$DRIVES_ON,该信号为一个类似脉冲信号,该信号触发ROBÆPLC信号$PERI_RDY(驱动装置处于待机运行状态即示教器上I信号常亮)变为常1,在$PERI_RDY为1后短暂时间后$DRIVES_ON变为0;$DRIVES_ON信号变为0的同时PLC给ROB清除错误信号$CONF_MESS为1,该信号清除错误后触发机器人给PLC信号$STOP_MESS(正常情况为0),同样情况,当$STOP_MESS变为0时$CONF_MESS变为0;当以上条件都满足后此时我们按启动按钮$EXT_START,触发CELL程序进行执行状态;先触发$PRO_ACT(程序号激活),示教器表现为S、I、R等为绿;触发程序号请求信号$PGNO_REQ为1;PLC收到程序号请求后开始程序号校验工作并将校验信号PGNO_PARITY发送给PLC 此时PLC校验完成,并将程序号有效信号$PGNO_V ALID发送给机器人,在此前机器人会提示等待程序号有效信息,一旦收到此信号,机器人开始执行调用程序;然后CELL程序执行信号变为0,同时子程序执行变为1,$APPL_RUN(应用程序运行)变为1;并且$PGNO_REQ不再发出,从而触发PLC给的信号程序号校验和程序号有效信号不再为1;机器人在任务程序执行中;当任务程序结束的时候触发$APPL_RUN(应用程序运行)变为0,CELL程序继续进入下一次执行中,机器人此时进入下一次循环执行中急停或安全停止后再启动的时序如下图此图为外部安全停止后的再启动时序,详细时序如下介绍:在正常执行程序状态下$APPL_RUN(应用程序运行)信号为1,当$USER_SAF(机器人用户安全信号正常情况下为1)例如在安全门开启后触发后即变为0;从而触发$STOP_MESS信号为1即为出现错误信息,CELL程序停止执行,$APPL_RUN 变为0;$PRO_ACT(程序号激活)信号被触发变为了0;$PERI_RDY(驱动装置处于待机运行状态)该信号原在伺服上电后一直为1,在安全信号被触发后也被置为了0;以上所有信号都是在安全信号被触发后发生;如果此时我们需要再启动,我们又从$DRIVES_ON信号开始再次伺服上电,接着清除错误,启动,整个过程再次如上面启动情况进行了程序循环中。
仁宝开机时序图文详解版

1:保护隔离电路当PACIN为高时,PQ19导通,PQ14,PQ15导通产生B+供电,PACIN来自适配器检测电路,如图PU56是一个比较器,当适配器电压分压高于RTCREF时,输出高电平的ACIN和PAIN,而RTCVREF产生于PU10;至此保护隔离开启。
需要另外说明的是,仁宝隔离电路一个最重要特点就是其点火回路,所谓电路回路就是一种保护机制,仁宝会对公共点电压进行欲供电,当检测到有短路(表现为公共点电压降低)就为拉低ACON(针对此图纸)。
从而拉低PAION,从而关闭保护隔离,其预充电电路如下:(当B+供电短路,PU5A比较器输出低电平的ACON,从而拉低PACIN,关闭隔离;)2:待机电压该待机芯片是MAX1632,芯片工作流程为:PIN22 V+得到供电,PIN10 SKIP#和PIN23 SHDN# 信号无效时,从PIN 21 得到线性电压VL ,PIN9REF得到2.5VREF,从PIN 4 12OUT 得到+12VALWP , 当芯片PIN7 和PIN28正常获得开启信号(该芯片为自开启,不接受外部控制),从而得到+5VALWP,+3VALWP;+5VALWP,+3VALWP 经过PJ4和PJ5将电压转为+5VALW,+3VALW;然后提供给EC和南桥的返回挂起电。
EC得到+3VALW供电,PIN158,PIN160晶振起振正常,PIN19 ECRST复位正常后,EC会读取ROM信息,进行GPIO引脚定义,则EC待机正常,之后,EC从PIN3 RSMRST#引脚送出南桥的返回挂起电路的复位信号,在南桥的得到供电,时钟信号正常后,再接收正常的RSMRST#后,南桥RTC电路正常待机,等待用户按下开关,等候开机;至此待机结束;用户按下开关:开关信号ON/OFF,被用户按下开关时出现高—低—高的变化,该变化送个EC的ON/OFF引脚;EC接收到该信号高—低—高的变化后,会有两个动作,(1)送出EC-ON信号,该信号送到开关引脚,将EC_ON转换为EC_ON#,EC_ON#又会使PQ31导通,使电池给VS供电,产生+5VP;(2)送出信号PWRBTN#给ICH,通知南桥用户按下开关,需要南桥开启相关信号;南桥接收到PWRBTN#信号后,会因此太高PM_SLP_S5#,PM_SLP_S4#,PM_SLP_S3#,PM_SLP_S1#,并将抬高后的信号返回给EC;当EC接收到这些抬高后的SLP信号后,会依次发出SYSON,SUSP#, VR_ON开启信号,从而开启响应状态的电压;SYSON作为内存电压的开启信号,首先开启的是内存供电,开启内存电压的供电芯片是ISL6225,产生+2.5VP;同时,SYSON通过转换电路,一方面将SYSON转换为SYSON#,另一方面将SYSON#转换为12V SUSON的电压(注意此时SYSON#信号转换为了SUSON),用于高电压的开启信号,这两个电压为后续的电压转换做准备;SYSON#开启USB供电;SUSON开启+3V供电;SUSP#(1)ISL6225的EN2脚,用于开启+1.25VP;(2)开启+5VDDA;(3)转换为+12V的SUSP(中间转换为RUNON),利用RUNON开启+5VS,+3VS,+1.5VS;VRON ,直接开启+1.2Vp,间接开启CPU核心供电;至此,加电完成;当VCC_CORE正常后,ISL6207送出VGATE信号给EC和ICH;于此同时,EC也会送出PM_PWROK给ICH,当南桥接收到VGATE和PM_PWROK信号后,内部相与运算,送出PCIRST#去复位北桥,从而北桥复位CPU;总结:仁宝电压好信号并不经过EC的检测,还有就是SYSON 主要开启+X V 电压,SUSP#主要开启+X VS电压;。
RKC温控器CD901中文说明书
•oooRKC温控器- CD-901 o RKC温控器系列- 精品推荐oRKC温控器- CB-900RKC温控器- CD-701RKC温控器- CH-102REX-C400o RKC温控器- CD-901 - 详细信息o RKC温控器CD-901 主要结构及功能: ·自主校正功能 ·加热/制冷控制 ·外型、接线与RKC一致·大屏LED显示 ·温度报警 ·操作、性能与RKC相同o RKC温控器使用警告·接线警告:- 如果仪器失效或发生错误,可引起系统故障,安装外部保护电路以防止类事故;- 为防止仪器损坏或失效,选用适当的保险丝保护电源线及输入/输出线以防强电源冲击。
·电源供给:- 为防止仪器损坏或失效,用额定电夺供电;- 为防止仪器损坏或失效,所有接线工作完成后方可供电。
·禁止在易燃气体附近使用:- 为防火、防爆或仪器损坏,禁止在有易燃、易爆气体,排方蒸气的场所中使用。
·严禁触及仪器内部:-- 为防止触电或燃烧,严禁触及仪器内部。
只有本厂服务工程师可以检查内部线路或更换部件,仪器内部有高电压、高温部件,非常危险!·严禁改动仪器:- 为防止事故或仪器失效,不禁改动仪器。
·保养:- 为防止触电,仪器报废或失效,只有本厂服务工程师可以更换部件;- 为保证仪器持续且安全使用,应定期保养,仪器内某些部件可能随使用时间的延长而损坏。
RKC温控器操作注意·断电后方可清洁仪器;·清除显示器上的污渍请用软布或棉纸;·显示器易被划伤,禁止使用硬物体操作面板按键,否则会损坏或划伤按键。
RKC温控器概述CH、CD系列智能温度控制器就是采用专用微处理的多功能调节仪表,它采用开关电源与表面贴装技术(SMT),因而仪表精致小巧,性能可靠。
特有的自诊断功能,自整定功能与智能控制功能,使操作者可能通过简单的操作而获得良好的效果。
RKC温控器使用说明方案

R KC温控器使用说明书一,型号说明:CD101CD401CD501CD701①②③④⑤*⑥⑦—⑧⑨CD901F;PID动作及自动演算(逆动作)D;PID动作及自动演算(正动作)W;加热/冷却PID动作及自动演算(水冷)*1A;加热/冷却PID动作及自动演算(风冷)*1②输入类型;③范围代码;(FK02)④第一控制输出(OUT1)(加热侧)M;继电器接点输出T;闸流控制管输出V;电压脉冲输出8;电流输出(DC4—20mA)7;电流输出(DC0—10mA)U;闸流控制管驱动用触发器输出(移相方式)G;闸流控制管驱动用触发器输出(过零方式)⑤第二控制输出(OUT2)(制冷侧)无记号;当控制是F或DM;继电器接点输出T;闸流控制管输出V;电压脉冲输出8;电流输出(DC4—20mA)⑥第一报警(ALM1)⑦第二报警(ALM2)N;未设报警K;附待机上限偏差报警A;上限偏差报警L;附待机下限偏差报警B;下限偏差报警P;加热器断线报警(CTL—6)*3C;上、下限偏差报警S;加热器断线报警(CTL—12)*3D;范围内报警R;控制环断线报警*4E;附待机上限偏差报警V;上限设定值报警F;附待机下限偏差报警W;下限设定值报警G;附待机上、下限偏差报警H;上限输入值报警J;下限输入值报警⑧通信功能N;无通信功能5;RS—485(双线系统)⑨防水/防尘功能N;无防水、防尘功能1;有无防水、防尘功能*1W或A型无自主校正功能*2第二报警(ALM2);选项*3不能被定为第一报警(ALM1)*4控制环断线报警只能在第一报警和第二报警中二,操作﹡(SET ) (SET )﹡﹡ (SET )﹡﹡﹡﹡可选运行/停止功能,按住﹤R/S 键1秒可在任意时间选此功能。
﹡﹡按住2秒以上。
﹡﹡﹡按SET 键时同时按﹤R/S 键*1输入类型和输入范围显示,通电后,可立即确认输入类型和输入范围。
例如;热电偶K 型输入,0,400 ℃。
①输入类型代码,输入的简化显示,显示温度单位输入类型代号 ②显示输入范围。
KRC操作

卸码垛集成项目KRC4培训手册v1.0一、KUKA 工业机器人介绍库卡(KUKA)公司是世界工业机器人和自动控制系统领域的顶尖制造商,其产品广泛应用于汽车、冶金、食品和塑料成形等行业。
其机器人重复定位精度0.015-0.2MM(KR180PA<±0.06 MM、KR470-2PA<±0.08 MM),平均故障时间超过7万小时。
Kuka机器人由三部分构成,分别是a)机械手(机器人机械系统)1底座,2转盘,3平衡配重(液压),4连杆臂,5手臂,6手专用的卸码垛机械手一般拥有4或5个伺服电机,通过减速器与各轴相连,实现4个自由度。
本体主要要铸铝与铸钢构成。
b)控制系统(krc4控制柜)控制伺服电机的运动,内部元件可能有高达780v的高压,维修检查时请关闭电源并且至少等待5分钟,直至中间回路完全放电。
1电源滤波器,2总开关,3控制系统面板(csp),4控制系统PC,5带驱动器的驱动电源(KPP),6、7驱动器,8制动滤波器,9控制柜电路板(ccu),10 继电器,11转换器,12保险元件,13蓄电池,14接线板,15外壳1镇流电阻,2热交换器,3外部风扇,4低压电源件c)手持操作与编程器(smartPAD)Kuka机器人二、KUKA smartPAD概览。
a)正面说明:b)背面说明:白色按键(长条或者圆形)是手动许可开关,绿色按键是手动程序正序运行按键三、KUKA smartPAD 显示及操作a)读取并解释机器人控制系统的信息提示。
b)KUKA机器人的工作模式Kuka机器人总共提供四种运行模式,分别是●T1(手动慢速运行)✓用于测试运行,编程与示教✓程序执行时的最大速度250mm/s✓手动移动时的最大速度250mm/s●T2(手动快速运行)✓用于测试运行✓程序执行时速度等于编程设定速度✓手动移动:无法进行●AUT(自动运行)✓用于不带上位控制系统的机器人✓程序执行时速度等于编程设定速度✓手动移动:无法进行●EXT(外部自动运行)✓用于带上位控制系统(PLC)的工业机器人✓执行程序时速度等于编程设定速度✓手动移动:无法进行我们只用到T1、EXT两种模式,其他模式请勿尝试。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
JEE – KUKA
长城KRC4门盖线启动时序说明
巨一自动化装备有限公司
机器人启动时序如下图
此情况为正常启动KRC时时序图:详细时序介绍如下
首先$EXT_START机器人启动信号开始前,首先机器人需要满足的启动条件有:ROBÆPLC信号:$USER_SAF(机器人用户安全信号) 为高电平、$ALARM_STOP(机器人急停正常)为高电平;
PLCÆROB信号:$DRIVES_OFF(伺服准备,伺服上电前必须为1)为高电平、$MOVE_ENABLE:机器人运动使能为高电平;
当这些信号满足后,PLC紧接着给机器人伺服上电命令$DRIVES_ON,该信号为一个类似脉冲信号,该信号触发ROBÆPLC信号$PERI_RDY(驱动装置处于待机运行状态即示教器上I信号常亮)变为常1,在$PERI_RDY为1后短暂时间后$DRIVES_ON变为0;
$DRIVES_ON信号变为0的同时PLC给ROB清除错误信号$CONF_MESS为1,该信号清除错误后触发机器人给PLC信号$STOP_MESS(正常情况为0),同样情况,当$STOP_MESS变为0时$CONF_MESS变为0;
当以上条件都满足后此时我们按启动按钮$EXT_START,触发CELL程序进行执行状态;先触发$PRO_ACT(程序号激活),示教器表现为S、I、R等为绿;
触发程序号请求信号$PGNO_REQ为1;
PLC收到程序号请求后开始程序号校验工作并将校验信号PGNO_PARITY发送给PLC 此时PLC校验完成,并将程序号有效信号$PGNO_V ALID发送给机器人,在此前机器人会提示等待程序号有效信息,一旦收到此信号,机器人开始执行调用程序;
然后CELL程序执行信号变为0,同时子程序执行变为1,$APPL_RUN(应用程序运行)变为1;
并且$PGNO_REQ不再发出,从而触发PLC给的信号程序号校验和程序号有效信号不再为1;
机器人在任务程序执行中;
当任务程序结束的时候触发$APPL_RUN(应用程序运行)变为0,CELL程序继续进入下一次执行中,机器人此时进入下一次循环执行中
急停或安全停止后再启动的时序如下图
此图为外部安全停止后的再启动时序,详细时序如下介绍:
在正常执行程序状态下$APPL_RUN(应用程序运行)信号为1,当$USER_SAF(机器人用户安全信号正常情况下为1)例如在安全门开启后触发后即变为0;
从而触发$STOP_MESS信号为1即为出现错误信息,CELL程序停止执行,$APPL_RUN 变为0;
$PRO_ACT(程序号激活)信号被触发变为了0;
$PERI_RDY(驱动装置处于待机运行状态)该信号原在伺服上电后一直为1,在安全信号被触发后也被置为了0;
以上所有信号都是在安全信号被触发后发生;
如果此时我们需要再启动,我们又从$DRIVES_ON信号开始再次伺服上电,接着清除
错误,启动,整个过程再次如上面启动情况进行了程序循环中。
对于外部急停触发的机器人停止,$ALARM_STOP信号被触发变为0,其他信号同安全
停止,再启动也是一样;
对于以上变量我们做了一张变量表可以看出变量值的变化情况,如下:
序号 1 2 3 4 5 6 7 8 9
备注 准备就
绪
运动过程中 原位
同时动作 00 1 0 0 1
条件
home run pause E_stop 1 1 0 1 0 0 Rc_rdy1 1 1 1 0 0 1 0 0 0 Alarm_stop 1 1 0 0 1 1 1 1 1 User_saf 1 1 1 1 1 1 1 1 1 Peri_rdy 1 1 0 0 1 0 1 0 0 Rob_cal 1 1 1 0 1 1 1 1 1 I_O_actconf 1 1 1 0 1 1 1 1 1 Stop_mess 0 0 1 0 1 1 1 1 1 IntEstop 1 1 0 0 1 1 1 1 1 Pro_act 1 1 0 0 0 0 0 0 0
Pgno_req 0/1闪
烁
0 0 0 0 0 1 1 1
Appl_run 0 1 0 0 0 0 0 0 0 Pro_move 0 1 0 0 0 0 0 0 0 In_home 1 0 0 0 0 0 1 1 1 On_path 1 1 1 1 1 0 1 1 1 Near_posret 1 1 1 1 1 1 1 1 1 Rob_stopped 1 0 1 1 1 1 1 1 1
综上:
以上为KRC机器人启动时序,PLC程序将根据该时序进行启动功能块的编程,做好各
交互信号的对接,从而实现了我们机器人自动启动。