负荷传感型全液压转向系统的刚度分析
工程车辆全液压转向系统管路特性分析

动
与
冲
击
第 3 第 3期 O卷
J OURNALOFVI BRAT ON AND S I H0C K
工 程车辆 全液 压转 向系统 管路特 性分 析
葛振亮 ,侯友 山 ,姜
( 1烟 台大 学 机 电汽 车 工 程学 院 , 台 烟
勇
10 8 ) 00 3
24 0 ; 京 科 技 大学 土 木 与 环境 工 程 学 院 , 京 6 05 2北 北
ss m( HS )w set l hd h ya i c a c r t so y rui ppso F S n h n u n e o ie n yt F S a s bi e .T edn m c h r t ii fhdal ie f H S a dteif e cs fppl e e a s a e sc c l i
s se S d n mi e po s i y tm’ y a c r s n e t me;f rt e s o ta d lr e da t rpp l o h h r n a g imee ie i ne,t e fu d r ssa e a ui e s e ma lr h i e itnc nd f d s n e g ts le , l l t e s se r s o e a i l h y tm e p ns sr p d y,b tt e se rn y tm n u e ne sv ih fe ue c s ilt n,wi h n r a i g o u h te i g s se e d r s i tn ie h g -r q n y o clai o t t e ic e sn f h b t mpiu e a d fe u n y, wh c s un o d cv o t e sa ii o te i g s se oh a l d n r q e c t ih i c n u i e t h tb lt f se rn y t m. I c e sn h v lme ea tc y n r a i g t e ou l si mo uuso i i h y t m a mp o e t e d n mi e p n e s e d a d sa ii d l fo l n t e s se c n i r v h y a c rs o s p e n tb l y.Th td e u t r vd he rtc l t e su y r s lsp o i e a t o eia s p otfrt e d sg ff l y r u i te i g s se a d f rt e a ay i fp p ln es’ y a c c a a t rsis u p r h e in o ul h d a lc se rn y tm n h n l ss o i ei e n t d n mi h r ce it . o y o c
无人驾驶拖拉机电控液压转向系统的可靠性测试学士学位论文

本科毕业设计无人驾驶拖拉机电控液压转向系统的可靠性测试摘要本文主要针对我校自主研发的无人驾驶拖拉机电控液压转向系统,开展电磁阀可靠性测试,检验电磁阀对长期通电和频繁通断电的耐受性。
分析了现有电控液压转向系统的组成,包括有过滤器、定量泵、手动换向阀、转向器、液压泵、压力表、溢流阀、二位三通换向阀、三位四通电磁比例换向阀和油箱等,描述了其基本工作原理。
在工作过程中,二位三通换向阀需要频繁通断以实现手动和自动油路的切换,直接关系到系统工作的稳定性和可靠性。
因此,本文设计了一套二位三通换向阀的可靠性测试系统。
该测试系统包括:基于AT91SAM9263的嵌入式系统开发板、电磁阀驱动放大电路和美国HYDRAFORCE公司生产的SV-10-31N-24VDC电磁阀。
基于SBC6330XARM开发板,开发了测试程序。
ARM板主控电路产生PWM信号,通过驱动电路放大信号,控制电磁阀油路。
本次测试一共进行了4中不同的控制信号测试,分别为周期为2秒、1秒、0.6秒的方波以及持续输出3.3V高电平。
2秒、1秒和0.6秒的方波测试时间为30分钟,持续输入高电平的测试时间为60分钟。
测试结果表明:ARM主控板和驱动电路控制下有效地工作,电磁阀对长期通电和频繁通断具有较好的耐受性。
关键词:SBC6330X 驱动电路电磁阀Turning to the Reliability of the Testing System of UnmannedTractors HydraulicWu Zhangrong(College of Engineering, South China Agricultural University, Guangzhou 510642, China) Abstract:This paper mainly aim at my school unmanned tractors hydraulic steering system, carry out the solenoid valve solenoid valve reliability test, test of tolerance is energized for a long time and frequent on-off.The analysis of the existing electric hydraulic steering system composition, comprising a filter, the quantitative pump, a manual reversing valve, steering gear, hydraulic pump, pres sure gauge, pressure relief valve, reversing valve, two three three position four way electrom agnetic proportion reversing valve and the mailbox, the basic working principle described. I n the work process, two position three way directional control valve need frequent on-off swi tch to realize manual and automatic oil, directly related to the stability and reliability of the s ystem. Therefore, this paper designed a reliability test system of a set of two position three way reversing valve.The test system comprises: driver development board, AT91SAM9263 embedded syste m SV-10-31N-24VDC solenoid valve solenoid valve amplification circuit and the United Sta tes of America HYDRAFORCE company production based on. Based on the SBC6330XAR M development board, development test program. ARM main control circuit generates a PW M signal, through the drive circuit of signal amplification, electromagnetic valve control cir cuit.The tests were conducted in different control signal test 4, respectively, a period of 2 se conds, one second, 0.6 seconds of Fang Bo and continuous output 3.3V high level. 2 seconds , one second and 0.6 second square wave test time is 30 minutes, sustained high level input t est time is 60 minutes. The test results show that: ARM main control board and a driving cir cuit control work effectively, the solenoid valve on the long-term electricity and frequent on-off has better tolerance.Key words: SBC6330X drive circuit electromagnetic valve目录1 前言 (1)1.1 研究背景 (1)1.2 研究目的 (1)1.3 研究意义 (1)1.4 国内外研究状况 (1)2 拖拉机电控液压转向系统原理 (3)2.1 拖拉机原有转向系统 (3)2.2 拖拉机电控液压转向系统的工作原理 (5)2.3 待测试二位三通换向阀的工作特性 (8)3 液压转向系统测试电路设计 (9)3.1 ARM主控电路 (10)3.1.1 SBC6300X开发板CPU规格 (10)3.1.2 SBC6300X开发板主板功能接口 (11)3.1.3 SBC6300X开发板核心板功能 (11)3.2 驱动电路 (12)3.2.1 IRFR9540芯片简介 (12)4 ARM主控板控制程序设计 (13)4.1 开发板硬件环境初始化 (13)4.2 利用定时器实现IO引脚的PWM信号输出 (14)5 可靠性测试流程及结果 (14)5.1 可靠性测试流程 (14)5.2 可靠性测试结果 (15)参考文献 (16)附录 (17)致谢 (21)华南农业大学本科生毕业设计成绩评定表1 前言1.1 研究背景中国是一个农业大国,用占世界7%的耕地解决了世界22%的人口温饱问题,取得了举世瞩目的成就。
基于AMESim的全液压转向系统的仿真分析
基于AMESim的全液压转向系统的仿真分析贺海洋;李建朝【摘要】AMESim是法国EMAGINE公司开发的高级工程系统建模仿真软件,为机械液压控制等工程系统提供一个较为完善的时域仿真建模环境.通过在AMESim仿真软件中建立全液压转向系统中优先阀和转向油缸的仿真模型,得出系统的仿真结果曲线,并进行分析,这对进一步提高工程机械的转向性能有一定的指导意义.【期刊名称】《农业装备与车辆工程》【年(卷),期】2011(000)010【总页数】4页(P36-39)【关键词】AMESim;转向系统;优先阀;转向液压缸;仿真模型【作者】贺海洋;李建朝【作者单位】河南科技大学机电工程学院,河南洛阳471003;河南科技大学机电工程学院,河南洛阳471003【正文语种】中文【中图分类】TH137.3;TP391.9随着近年来我国铁路高速公路建设的高速发展,工程机械也朝着大型化趋势发展,工程机械转向阻力矩也随之提高,靠单级全液压转向器控制的液压动力转向系统已不能满足转向要求。
全液压转向系统具有转向灵活轻便、性能稳定、故障率低、布置方便等优点,广泛应用于装载机、挖掘机等各种工程机械的转向系统。
所以全液压转向系统的性能仿真分析和试验研究,对提高工程机械在工作中的可靠性和高效性有着非常重要的意义[5]。
由法国EMAGINEG公司开发的AMESim,作为一款优秀的的仿真软件,已成为流体、机械、热分析等复杂系统建模和仿真的优先选择平台[1]。
本论文首先分析了全液压转向系统的工作原理及各部件组成,在此基础上结合转向系统原理,在AMESim平台对系统关键元件建模仿真,研究分析了输入信号下全液压转向系统关键元件的工作特性。
全液压转向系统集转向器和流量放大器于一体,既具有转向器的负荷传感功能,又具有流量放大功能。
在转向油路与工作油路同时工作的情况下,液压转向泵供油优先满足转向油路使用,剩余部分供给工作油路使用。
因此,它既能保证转向油路可靠工作,又减小了液压泵排量,达到节能的目的。
负荷传感型全液压转向系统的数学模型及试验验证

负荷传感型全液压转向系统的数学模型及试验验证
李锦
【期刊名称】《农业装备与车辆工程》
【年(卷),期】2011(000)002
【摘要】根据负荷传感液压转向系统的工作原理和结构特点,建立负荷传感型全液压转向系统的数学模型,利用MATLAB仿真软件得到该系统相应的仿真曲线,与试验测试得到的实际数据曲线进行比较.结果表明,两种曲线具有高度的一致性,从而验证了该数学模型的正确性与可靠性,为今后进一步对该系统进行相关的研究提供了一定的理论基础.
【总页数】4页(P28-31)
【作者】李锦
【作者单位】韶关学院,广东,韶关,512005
【正文语种】中文
【中图分类】U463.4
【相关文献】
1.双泵合/分流负荷传感型全液压转向系统的应用 [J], 景军清;徐新跃
2.FD420A型叉车负荷传感全液压转向系统及转向机构的优化设计 [J], 王树德;张宪雷
3.负荷传感型全液压转向系统的稳定性分析 [J], 李锦;毛桂生
4.负荷传感型全液压转向系统的稳态误差分析 [J], 李锦
5.负荷传感型全液压转向系统的刚度分析 [J], 李锦
因版权原因,仅展示原文概要,查看原文内容请购买。
全液压转向系统的动态特性仿真

Ke wo d : Hy ru i te n e ; D n mi ef r n e;S mu ai n y rs da l s r gg a c ei r y a c p r ma c o i lt o
全液压 转 向器作 为 一种 输 出功率 较 大 的全助 力 转 向器 ,广泛应用 于小 型汽 车 、铰 接工 业 车辆 ( 如
W ANG Xio n Z a mig , HANG Ha ,DEN Ja mig , B a mi i G in n AO Xio n
ห้องสมุดไป่ตู้
( . c o l fMe h t nc n ie r g o a t iaJa tn nv ri 1 S h o c ar isE gn ei fE s Chn ioo g U iest o o n y,Na c a gJ n x 3 01 n h n i g i 0 3,C ia a 3 hn ;
《农业装备与车辆工程》2010年总目次

C D仿真在客车外流场分析方面的应用研究 (-0 F 42)
设计 与研究
悬架非线性振动研究综述 浅谈汽 车的转 向系统
(—) 13 f— ) 7 1
(- 1 11) ( 1) 卜 4
天然 气汽 车浅谈
履带 车辆松 软路面通过 性分析
发 动机排气 门热一 机械耦 合应力 数值分析 (— 4 43)
负荷传感型全液压转向系统的稳态误差分析(_4 22)
套 阀式 液压凿 岩机设 计研究 基于‘ 眼” 蝇 传感网络的大型车辆防撞系统研究 (— 7 22) (-) 33 基于 A A D MS高位 自卸汽车运 动仿真 分析 (— 3 23) 我国 E P电子稳定系统推- 蔓 影响因素分析 (-) S 广 37
(—0 6 1) (一 3 6 l) (一 8 6l) (— 1 62 )
( — 4 62 )
某型 汽车仪表 台模态 及刚度有 限元分 析 (一 6 6l)
钢板弹簧柔性体建模及整车性能仿真 80 30气体 机可视化 发动机 缸套 的试 制 汽车超 车安全辅 助判 断系统 的研究
气缸盖 的有限元 研究
21 0 0年第 l 2期 ( 总第 2 3 ) 3期
农 业装 备与车辆 工程
A RC L U A Q IM N G IU T R LE UP E T& V H C EE G N E I G E IL N I E RN
No l 2 l 2 O 0
(oal 2 3 T tl 3 ) y
基于 A S S N Y 二次开发的载货车车架参数化, 系统 揽
基于显式有限元法 的汽车碰撞仿真研究
究
(— 2 5 2)
(- 5 52 ) -
双泵合-分流负荷传感型全液压转向系统的应用
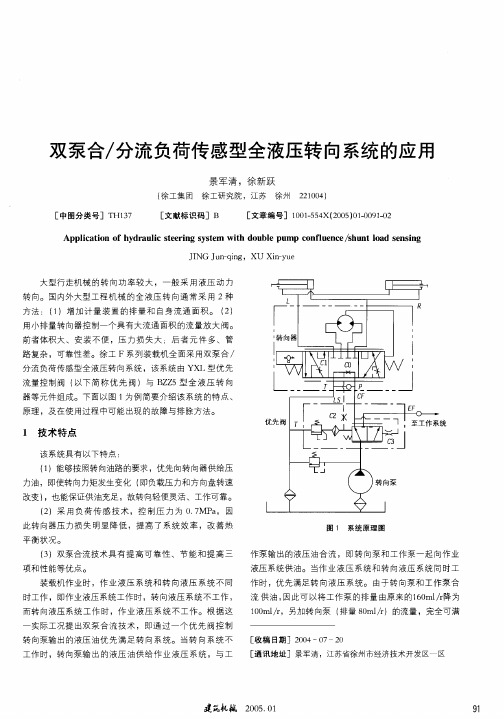
熄火转向时,计量装置起油泵作用, 输出的压力油 推动转向油缸活塞,油缸回油腔排出的油液经转向器内 的单向阀返回变节流口C 的上游,即熄火转向时与优先 1
阀无关。
2 工作原理
优先阀是一个定差减压元件,无论负载压力和油泵 供油量如何变化, 优先阀均能维持转向器内变节流口C 1 两端的压差基本不变,保证供给转向器的流量始终等于 方向盘转速与转向器排量的乘积。 转向器处于中位时,如果发动机熄火, 油泵不供油, 优先阀的控制弹簧把阀芯向右推, 接通 C F油路。发动机启 动后, 优先阀分配给C F油路的油液, 流经转向器内的中 位 节流口C , ) 产生压降。c 两端的压力传到优先阀阀芯的两 o 端,由 此产生的液压力与弹簧力、液动力平衡, 使阀芯处于 一个平衡位置。由于c 的液阻很大, o 只要很小的流量便 可以产生足以推动优先阀阀芯左移的压差, 进一步推动 阀芯左移,开大 E F阀口,关小 C F阀口,所以流过 C F 油路的流量很小。 转动方向盘时, 转向器的阀芯与阀套之间产生相对 角位移,当角位移达到某值后,中位节流口C 完全关 O 闭,油液流经转向器的变节流口C ,产生压降,C 两 1 1 端的压力传到优先阀阀芯的两端,迫使阀芯寻找新的平 衡位置。如果方向盘的转速提高,在变化的瞬间,流过 转向器的流量小于方向盘转速与转向器排量的乘积,计 量装置带动阀 套的转速低于方向盘带动阀芯的转速, 结 果阀芯相对阀套的角位移增加,变节流口C 的开度增 1 加。这时,只有更大的流量才能在 C 两端产生转速变化 1 前的压差,以便推动优先阀阀芯左移。因此, 优先阀内 接通 C , F油路的阀口开度将随方向盘转速的提高而增大。 最终, 优先阀向转向器的供油量将等于方向盘转速与转 向器排量的乘积。 转向油缸达到行程终点时,如果继续转动方向盘, 油液无法流向转向油缸, 这时负载压力迅速上升,变节 流口C 两端的压差迅速减小。当转向油路压力超过转向 1 安全阀的调定值时, 该阀开启。压力油流经节流口C 产 2 生压降, 这个压降传到优先阀阀芯的两端, 推动阀芯左 移, 迫使接通C F油路的阀口关小, 接通 E F油路的阀口 开大, 使转向油路的压力下降。
负荷传感液压转向系统仿真及试验徐杰

当转向器处于中位时, 发动机熄火时, 油泵不供 油, 弹簧把优先阀的阀芯推向右端, 使 EF 油路关闭, CF 油路接通。发动机启动后, 液压泵输出油液经优先 油液经转向器中位节 阀 CF 阀口进入转向器 P 接口,
86
液压与气动
2014 年第 6 期
节流阀使马达转速为 n = 40 r / min, 调节溢流阀给转向 器施加不同的负载压力, 测得输出流量, 绘制全液压转 向器压力与流量的特性曲线, 如图 13 所示。
图2 负荷传感全液压转向器仿真模型
面积大小。油液的流向取决于方向盘带动转向柱的转 动方向, 每个阀口的过流面积取决于转向杆的相对变 形量, 也就是转向盘的输入量。其中马达具有转子、 定 子作为计量马达的功能, 转动负载模拟转子定子之间 单向阀改变液流走向从而 的粘性摩擦以及转动惯量, 实现转向器左右转向的功能。
仿真结果与分析
当模型建立完毕后,进入 AMESim 仿真软件的运 在工具栏选 Simulation 中选择时域模式, 在这 行模式, 种模式下进行仿真, 可得到仿真模型各参数结果曲线 。 模拟方向盘输入信号的曲线如图 3 示, 输入的信 号为正弦周期信号, 液压源为恒定流量源。 图 4 为节 流口 a 的参数设置。
要: 详述了负荷传感液压转向系统的结构和工作原理, 据此在 AMESim 中对转向器建模分析。转向 器的静态试验和动态试验验证了负荷传感转向器模型的正确性。此外负荷传感液压转向系统的静态性能试 摘 能量损失小、 系统稳定性良好的特点。 验和动态性能试验表明负荷传感液压系统具有响应速度快、 关键词: 负荷传感; AMESim; 液压转向系统; 仿真; 试验 中图分类号: TH137 ; U463 文献标志码: B 4858 ( 2014 ) 06008306 文章编号: 1000-
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 Dm
—
() 1
+
进而影响车辆的不足转 向度 ,另外对车辆的转向
越高 .现代工程车辆上 已广泛采用全液压转 向系 统, 特别是随着液压技术的不断进步 , 工程车辆有 向大型化和小型化两端发展 的趋势。负荷传感型
全液压 转 向系统具 有更 好 的转 向调 节性 能 和明 显 的节 能效果 。 而越 来越 多 地被 运用 , 视为 全 液 从 被 压转 向系统 的发 展方 向 。 转 向系 统 刚度 会 改 变 车 辆前 轮 的侧 偏 刚 度 ,
21 0 0年第 3期
农 业装 备与 车辆工 程
A R C L U A Q IME T&V H C E E G N E I G G IU T R LE U P N E IL N IE R N
No3 O1 . 2 0
( 总第 2 4 2 期)
(oM y2 ) T tl 2 4
流量和各节流 口面积的计算公式推导可得负荷传 感 型全液压转向系统的数学模型 。再通过对转向
系统 的数学模型 、转向油缸工作腔流动连续方程 及转 向油缸动力平衡方程进行拉氏变换 ,并进行 简化 。 可得到油缸活塞位移的表达式[: ]
y 互d ㈤: q k
d i1 .9 9j s . 7 — 122 1 . . 1 o:0 6/.s 1 3 3 4 . 00 0 0 3 in 6 0 30
负荷传感型全液压转 向系统 的刚度分析
李锦
( 韶关学院 , 广东 韶关 52 0 ) 10 5
摘要: 通过对转 向系统的数 学模型 、 向油缸 工作 腔流动连续方程及 转向油缸 动力平衡方程进行拉 氏变换 , 转 得 到油缸活塞位移表达式。在此基础上 . 通过 MA L B软件绘制 出了负载刚度频率特性伯德 图, TA 并对负载变 化频 率与 系统刚度的关 系进行 了分析 , 出影响 系统刚度的主要参数 , 负荷传 感型全液压转向 系统的设计 得 为
与 改进 提 供 理 论依 据
关键词 : 负荷传 感; 转向 系统 ; 刚度 分析
中图分类号 : 4 34 U 6.
文献标识码 : A
文章编号 :6 3 34 (0 0 0 — 0 8 0 17 — 12 2 1 )3 0 3 — 2
S i n s a y i fF l h d a l t e i g S s e fLo d s n i g T p t e sAn l ss o u l y r u i S e rn y t m o a - e sn y e f - c
Ke wo d :l a - e sn ;se r g s se y r s o d s n i g te i y t m;s f e sa ay i n t f s n l s in s
工程 车辆 的转 向系统对 整 机性 能起 着非 常 重
通过对负荷传感型全液压转向系统各节流 口
要的作用 .随着工程车辆对转 向系统的要求越来
se rn y i d rwo kn h mb r n h y a c e u l r m q a in fs ei g c l d r a x rs i n o y id rp so t ei g c l e r i g c a e ,a d t e d n mi q i b u e u t s o t rn y i e , n e p e so fc l e itn n ii o e n n d s l c me t wa b a n d . On t i b ss t r u h t e ip a e n s o t ie s a i , h o g h MA AB o t r t ma o t h b d d a r m o r q e c h TL s f wa e o p u te o e ig a f fe u n y c a a trsiso a t f e s,t er l t n h p b t e h o d c a g sfe u n y a d t e s s m t n s a n lz d,t e h r ce t fl d s f s i c o in h e ai s i ewe n t el a h n e r q e c n h y t si e sw sa a y e o e f h ma n p r me es a e t g h y tm t n s r b a n d I p o i e h o ei a a i f rd s n a d i r v h d a l i a a tr f ci t e s se si e swe e o ti e . t r v d s t e r t lb ss o e i n mp o e o n f c g f y rui c se rn y tm fla — e sn y e te g s se o d s n ig t p . i o
L i IJn
( hounU i ri , h ou n5 2 0 , hn ) S aga nv sy S aga 10 5 C ia e t
Ab t a t n t i p p r y L p a e t n fr n h t e t a d l ft e se r g s se sr c :I s a e ,b a l c r s mig t e mah mai l h a o c mo e t e n y t m,te f w c n iu t q a in o o h i h o o t i e u t f l n y o