基于磁强计的皮卫星姿态角测量误差
基于太阳电池板与磁强计的小卫星姿态确定算法研究
( 南京 航 空航 天大 学 导 航 研 究 中心 ,南 京 20 1 ) 106
摘 要 :直 接 将太 阳 电 池板 电 流 作 为量 测 量 进 行 姿 态 确 定 , 仅 可 观 性 不 高 , 不 利 于 计 算 量 的 减 少 。分 析 不 也
维普资讯
第2 8卷第 1 期
20 0 7年 1 月
宇 航 学 报
J u u f t n uis o n d o r a t As o c
Vo . 8 12
No. 1
Jn ay 2 0 a ur 0 7
基 于太 阳 电池 板 与磁 强计 的小 卫 星 姿态 确 定 算 法研 究
2 太 阳矢量 的估计
在文 献 [ ] , 2 中 直接将 获得 的太 阳 电池 板与 太 阳 之间 的夹角 作为 量 测值 , 构建 量 测 方程 进 行 滤 波计
计太 阳矢 量 , 与磁 强 计 结 合 , 再 利用 T ID 算 法 获 RA
得量 测 四元数 , 然后 进行 卡尔 曼滤 波 。最 后 , 系统 对 进 行 了仿 真 。
研 究课 题 。
, 。 a为 。时太 阳电池板 所产 生 的电流 。这 n 是 :
就是 利用 太 阳电池 板 电流 测量 太 阳矢 量 的基 本关 系
式 。事 实 上 , 阳电 池板 光 照一 电流特 性 还 受 到温 太 度、 空间辐 射 、 球 反 照 等微 小 的影 响 。文 献 [ ] 地 2 对 地球 表 面反照 的建模进 行 了较 为详细 的介绍 。在本
1 太 阳 电池板测 量原 理分 析
算, 不计 算 太 阳矢 量 。这种 方 法 需 对量 测 方 程 进行 线性化 , 然会带 来 高阶项 的截 断误差 , 必 同时 降低 了 系统 的可观测 性 ; 外 当量 测 矢 量增 多时 计 算量 迅 此 速文 先计 给 算 太 阳矢 量 , 卫 星上 安 装 的 磁 强计 矢 量 构 成 观测 与
双矢量定姿基本原理

双矢量定姿基本原理一、引言双矢量定姿(Dual Vector Attitude Determination,DVAD)是一种基于磁力计和太阳传感器的姿态测量方法。
它能够通过测量磁场和太阳方向来确定卫星的三维姿态,是卫星导航、通信、遥感等领域中常用的姿态控制技术之一。
二、双矢量定姿原理1. 磁力计原理磁力计是一种能够测量周围磁场强度的仪器。
在卫星上,通过安装三个正交的磁力计,可以同时测量地球磁场在三个轴向上的分量。
由于地球磁场在不同位置和时间具有不同的强度和方向,因此可以利用这些数据来确定卫星相对于地球坐标系的姿态。
具体而言,假设卫星坐标系为x-y-z轴,地球坐标系为X-Y-Z轴,则可以得到以下公式:Bx = Bx0*cosα + By0*sinαBy = -Bx0*sinα + By0*cosαBz = Bz0其中,Bx、By、Bz分别表示卫星坐标系下的地球磁场分量;Bx0、By0、Bz0表示地球坐标系下的地球磁场分量;α表示卫星坐标系x轴与地球坐标系X轴之间的夹角。
由此可见,只需要测量出卫星坐标系下的地球磁场分量和卫星坐标系x 轴与地球坐标系X轴之间的夹角,就可以计算出卫星相对于地球坐标系的姿态。
2. 太阳传感器原理太阳传感器是一种能够测量太阳方向的仪器。
在卫星上,通过安装两个正交的太阳传感器,可以同时测量太阳在卫星坐标系中的方向。
由于太阳在不同位置和时间具有不同的方向,因此可以利用这些数据来确定卫星相对于地球坐标系的姿态。
具体而言,假设卫星坐标系为x-y-z轴,则可以得到以下公式:cosθ = cosθ1*cosθ2 + sinθ1*sinθ2*cosφsinψ = sinθ1*sinφ / sinθ其中,θ1、θ2分别表示两个太阳传感器测得的夹角;φ表示两个太阳传感器所在平面与xy平面之间的夹角;ψ表示卫星绕z轴旋转的角度;θ表示卫星与太阳的夹角。
由此可见,只需要测量出两个太阳传感器测得的夹角、所在平面与xy平面之间的夹角以及卫星与太阳的夹角,就可以计算出卫星相对于地球坐标系的姿态。
地磁导航中磁测姿态解算误差分析

地磁导航中磁测姿态解算误差分析龙达峰;刘俊;张晓明;李杰【摘要】在弹载地磁导航应用中,磁测姿态系统解算精度受不同误差源的影响.为提高磁测精度,根据误差理论对磁测系统进行了误差机理分析与建模;建立了偏航误差、地磁分量误差和传感器测量误差的误差传递关系,为传感器选型及后续误差补偿提供理论参考.仿真结果表明,各误差间的传递关系呈现非线性关系,在全射向范围内误差以零度俯仰角为成中心对称分布规律.此外,若弹体靠近或沿着地磁方向飞行时,都会出现很大的解算误差,甚至于方程无解.因此有针对的避开上述飞行方案,能提高磁测姿态解算精度.【期刊名称】《科学技术与工程》【年(卷),期】2015(015)006【总页数】6页(P204-209)【关键词】地磁导航;误差分析;误差模型【作者】龙达峰;刘俊;张晓明;李杰【作者单位】中北大学仪器科学与动态测试教育部重点实验室,太原030051;中北大学仪器科学与动态测试教育部重点实验室,太原030051;中北大学仪器科学与动态测试教育部重点实验室,太原030051;中北大学仪器科学与动态测试教育部重点实验室,太原030051【正文语种】中文【中图分类】TN911.6地磁导航具有其他导航方式不可替代的优点,正在成为近几年军事导航领域的研究热点和关注焦点。
由于磁测姿态方程组的相关性使其无法从中直接提取全部姿态角,现有的磁测解算方法大多是建立在预知其中一个姿态角,再求解姿态方程组得到其余两个姿态角,预知姿态角通常是借助其它辅助传感器获得[1]。
针对大多数炮射高速旋转弹,其弹道偏航角变化很小,现有的磁测姿态方法有两个假设条件:其一是假设射程内偏航不变,通常取值炮位射向作为已知偏航角;二是假设全弹道范围内地磁场分量不变,即为常值地磁分量。
实际上,基于上述两个假设必然会带来偏航姿态角误差和地磁分量误差,从而影响到最终姿态角解算的精度[1,2]。
除此外,地磁传感器测量误差也是影响姿态角解算精度重要因素,传感器测量误差成因比较复杂,其中传感器的灵敏度误差、零偏误差以及载体涡流磁场和随机干扰磁场等都会造成测量数据的不准确[2—7]。
三轴磁强计测量误差修正方法

三轴磁强计测量误差修正方法
郝寿;绳涛;陈小前
【期刊名称】《航天器环境工程》
【年(卷),期】2011(028)005
【摘要】三轴磁强计测量误差修正对卫星姿态确定和控制具有重要意义.文章针对三轴磁强计测量误差的来源进行理论分析,引入磁场输入引起的常值漂移,建立了三轴磁强计测量误差修正模型,并基于该模型在磁环境模拟器中对Honeywell公司的三轴磁强计(HMR2300R)进行标定.实验结果表明改进模型可以将测量误差控制在50 nT以内,满足低成本敏感器在微小卫星姿态确定中的应用要求.
【总页数】4页(P463-466)
【作者】郝寿;绳涛;陈小前
【作者单位】国防科学技术大学航天与材料工程学院,长沙410073;国防科学技术大学航天与材料工程学院,长沙410073;国防科学技术大学航天与材料工程学院,长沙410073
【正文语种】中文
【中图分类】V412.4+2;TH762.3
【相关文献】
1.微小卫星三轴磁强计测量误差校正方法 [J], 刘燎;孙华苗;何波;薛力军;张迎春
2.航姿系统三轴磁强计动态校正研究 [J], 李翔;刘晓琴;宋百麒
3.弹载三轴磁强计的椭球拟合补偿方法 [J], 安亮亮;王良明;钟阳
4.基于椭球拟合的三轴磁强计两步校准法 [J], 于向前;陈傲;宋思宇;高爽;邵思霈;刘斯;肖池阶;曲亚楠;宗秋刚;陈鸿飞;邹鸿;施伟红;王永福
5.基于SERF原子磁强计的三轴磁场顺序补偿方法研究 [J], 康翔宇;徐俊;范正焜;李阳;高秀敏
因版权原因,仅展示原文概要,查看原文内容请购买。
一种八位置数字磁强计系统误差标定方法_林恒
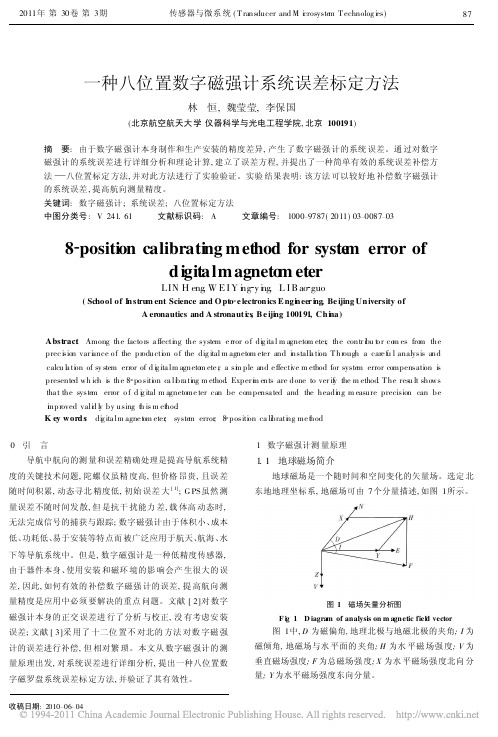
H
p x
=
s in
s in
H
b x
+
cos
H
b y
-
s in
cos
H
b z
,
H
p y
=
cos
H
b x
+
s in
H
b z
,
H
p z
=
-
s in
cos
H
b x
+
s in
H
b y
+
cos
cos
H
p z
.
将
H
p x
,
H
p y
代入式
(
1)即可计算出磁航向角
m [1] 。
由于地磁南北极和地理南 北极之间存在磁偏角, 因此,
8 position calibrating m ethod for system error of d igita lm agnetom eter
L IN H eng, W E I Y ing y ing, L I B ao guo
( School of In strum ent Science and O pto e lectron ics E ngin eer ing, Be ijing Un iversity of A eronautics and A stronaut ics, B e ijing 100191, Ch ina)
Abstract: Among the facto rs a ffecting the system e rror o f dig ita l m agnetom eter, the contr ibu to r com es from the prec ision var iance o f the production o f the dig ital m agnetom eter and installa tion. T hrough a care fu l analysis and calcu la tion of sy stem error of d ig ita lm agnetom ete r, a sim ple and e ffective m ethod for system error compensation is presented wh ich is the 8 po sition ca libra ting m ethod. Exper im ents are done to ver ify the m ethod. T he resu lt shows tha t the system error o f d ig ital m agnetome ter can be compensa ted and the heading m easure precision can be improved valid ly by using th is m ethod. K ey word s: dig ita lm agne tom eter; system error; 8 position ca librating me thod
三轴磁航向传感器的全姿态误差补偿

计算与测试三轴磁航向传感器的全姿态误差补偿袁智荣(西北工业大学三六五所,陕西西安710072)摘 要:通过对三轴磁航向测量原理及误差形成原因的分析,提出了一套快速有效的补偿办法。
实验结果表明,采用自动罗差补偿方法,可将全姿态磁航向的测量误差在20°情况下修正到1°以内,在工程引用中得到了满意的效果。
关键词:磁航向;误差;罗差中图分类号:TP202 文献标识码:A 文章编号:1000-9787(2003)09-0034-03All status error compensation about three axism agnetic heading sensorYUAN Zhi-rong(The365th I nst,N orthw estern Polytechnic U niversity,Xi’an710072,China)Abstract:Through analysing the reason about three axis magnetic heading measured principle and error,a fast and effective method about compensation is brought forward.The experimental result indicats the all status error about magnetic heading measure is corrected less than1degree from20degree by automatism compass error compensatory method,this has gained the satisfactory effect in engineering adduction.key w ords:magnetic heading;error;compass error0 引 言众所周知,捷联式三轴磁传感器的罗差修正是一项极烦琐的工作,许多科研工作者通过努力,取得了显著的成绩,使用泊森(Porsen)[1]公式虽然具有较高的补偿准确度,但是求取系数的方法仍然比较麻烦,需要外加测试程序,对操作人员要求比较高,相对工作量也大,不适于批量作业。
利用磁强计数据确定卫星三轴姿态的方法
利用磁强计数据确定卫星三轴姿态的方法
周健;朱振才;王建宇
【期刊名称】《宇航学报》
【年(卷),期】2001(022)002
【摘要】针对低轨、低精度、低费用的小卫星,本文研究了仅依靠磁强计的测量数据,通过卡尔曼滤波得到三轴的姿态角和角速率的算法。
其次,提出了一整套验证该算法的方法,并用MATLAB完成了数值仿真。
【总页数】5页(P106-110)
【作者】周健;朱振才;王建宇
【作者单位】中国科学院上海技术物理研究所,;中国科学院上海技术物理研究所,;中国科学院上海技术物理研究所,
【正文语种】中文
【中图分类】V448.22
【相关文献】
1.三轴磁强计姿态确定 [J], 田菁;吴美平;胡小平
2.基于磁强计和红外地平仪的卫星轨道姿态一体化确定方法 [J], 邢艳军;曹喜滨;张世杰
3.卫星姿态确定与三轴磁强计校正 [J], 黄琳;荆武兴
4.利用磁强计数据确定卫星姿态的简易滤波算法 [J], 谢祥华;姜长生;朱秋芳
5.三轴磁强计与太阳电池阵组合的皮卫星姿态确定方法 [J], 李东;李正华;金仲和;王跃林
因版权原因,仅展示原文概要,查看原文内容请购买。
基于磁强计的卫星自主定轨
基于磁强计的卫星自主定轨 3赵黎平 周 军 周凤岐西北工业大学 , 西安 710072摘 要 针对低轨小卫星 , 提出一种低成本的自主导航方法 。
该方法采用一个三 轴磁强计作为测量手段 , 通过卫星所在位置的地磁场强度的量测值与国际地磁场 模型 ( IG RF ) 之间的差值来提供导航信息 , 利用推广的卡尔曼滤波技术来确定 卫星的轨道 。
仿真研究的结果验证了该方法的可行性 。
主题词 小型卫星 自主式导航 磁强计 卡尔曼滤波M agnetometer - B a s ed Automous Satellite N avigationZhao Liping Zhou J u n Zhou FengqiN orthwestern P olytechnical University , Xi ′an 710072Abstract A si mple autonomous orbit d e termin a t i on s ystem f o r l ow ear th or biting s pacecraf t s is devel oped . This or bit estimation algorithm only based on the measurements of the magni 2 tude o f the geomagnetic f i eld vector. A n extended K alm an f i lter is used to deduce a minimun error estimate of the spacecraf t position . For small satellites , this system is attractiv e because no additional hardware is required besides a magnetometer and an on - board computer. Re 2 sults of this simulation show that pre cision of our method is about 2 km .Sub ject term s Small satellite Autonomous na vigation Magnetometer K alman f i ltering 引 言1 卫星自主导航是指卫星不依赖地面支持 , 而利用星上自备的测量设备实时的确定自己 位置和速度的能力 。
轨道误差 姿态误差
轨道误差姿态误差
轨道误差是指航天器或卫星在其预定轨道上的偏差。
这些偏差可能是由于推进系统的不精确性、外部扰动、引力摄动等因素导致的。
轨道误差对于卫星导航、通信和遥感等应用来说非常重要,因为它们会影响卫星的定位精度和覆盖范围。
为了减小轨道误差,需要进行精确的轨道测量和控制,以及对推进系统和导航系统进行精准校准。
姿态误差是指航天器或飞行器在其预定姿态或方向上的偏差。
这些偏差可能是由于姿态控制系统的不精确性、外部扰动、惯性测量单元误差等因素导致的。
姿态误差对于航天器的稳定性、精确控制和任务执行都至关重要。
为了减小姿态误差,需要进行精确的姿态测量和控制,以及对姿态控制系统和传感器进行精准校准。
从工程角度来看,轨道误差和姿态误差都需要通过精密的测量和控制系统来进行修正和校准。
针对轨道误差,可以采用推进系统的校准、轨道测量和修正等手段来减小误差。
而对于姿态误差,可以通过惯性测量单元的校准、姿态控制系统的精确调节等方式来减小误差。
此外,从科学研究的角度来看,轨道误差和姿态误差的研究也是航天领域的重要课题之一。
科学家们致力于开发更精确的测量和控制技术,以应对复杂多变的航天环境,提高航天器的定位精度和控制稳定性。
在未来,随着航天技术的不断发展,相信对轨道误差和姿态误差的研究也会取得更多突破,为航天事业的发展提供更强有力的支持。
3-3卫星定位测量中的误差分析处理.
任务四卫星定位测量中的误差分析处理任务介绍:在GPS测量中包含系统误差和偶然误差,其中系统误差影响尤其显著。
本任务将对各种GPS测量的误差进行分析,并在分析的基础上提出为消除或减弱各项误差对定位结果的影响应采取的相应措施。
任务分析:在GPS观测中理解与GPS卫星有关的误差、与卫星信号传播有关的误差和与接收设备有关的误差。
掌握消除或减弱三种误差的方法。
相关的理论知识:与GPS卫星有关的误差、与卫星信号传播有关的误差和与接收设备有关的误差。
归纳总结:通过GPS实测来讲解卫星定位测量误差。
1、卫星定位测量中的误差来源及分类按测量误差的性质,误差有偶然误差、系统误差与粗差三类。
偶然误差从群体上服从正态分布规律,主要影响观测结果的精密度。
GPS 观测中的偶然误差主要为观测误差,如对中误差、量天线高的误差等;系统误差是在大小与方向上具有偏向性的误差,它主要影响观测成果的准确度。
在GPS观测中,如钟差、轨道误差等具有系统性偏差。
GPS 观测中主要的误差源为系统误差。
系统误差可以采取模型改正、将系统偏差当作未知参数与结果一并求解和求差法等方法消减其影响。
粗差是不允许的,关键在于如何探查它的存在,并予以剔除。
粗差将影响成果的可靠性。
2、与卫星有关的误差与GPS空间卫星有关的误差主要包括卫星钟的误差和卫星的轨道误差。
1)卫星钟差由于卫星的位置是时间的函数,因此GPS的观测量均以精密测时为依据,而与卫星位置相对应的时间信息,是通过卫星信号的编码信息传送给接收机的。
在GPS定位中,无论是码相位观测或是载波相位观测,均要求卫星钟与接收机钟保持严格同步。
实际上,尽管GPS卫星均设有高精度的原子钟(铷钟和铯钟),其稳定度在10-12以上,但它们与理想的GPS时之间,仍存在着难以避免的偏差或漂移,这种偏差的总量约在1 ms以内。
对于卫星钟的这种偏差,一般可由卫星的主控站,通过对卫星钟运行状态的连续监测确定,并通过卫星的导航电文提供给接收机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第37卷第6期2007年11月吉林大学学报(工学版)JournalofJilinUnive飓ity(EngineeringaⅡd
nchnology
Edition)
基于磁强计的皮卫星姿态角测量误差郁发新1,郑阳明2,谢长雄2,金佳军2,金仲和2(1.浙江大学航空航天系.杭州310027}2.浙江大学信息与电子工程学系,杭州3l0027)
V01.37No.6Nov.2007
摘要:采用三轴磁强计测量地磁场矢量,与轨道演化和国际地磁场参考模型(IGRF)计算获得的地磁场矢量进行比较,获得姿态角度信息的方法适合体积小、重量轻、功耗低的皮卫星应用环境。地磁场矢量实际测量误差和轨道模型演化计算的地磁场矢量误差是皮卫星姿态角测量的两大误差源。通过分析获得磁强计A/D采样、磁传感器误差、温度漂移、铁磁材料等因素导致地磁场矢量实际测量误差为1.74。。皮卫星自身的特点不允许采用复杂的sPG4轨道演化模型,基于Kepler轨道模型和IGRF地磁场模型计算获得的地磁场矢量误差为o.5。。因此,基于三轴磁强计的皮卫星姿态角测量误差为2.24。。关键词;航空、航天科学技术基础学科;皮卫星,三轴磁强计;角度误差分析中圈分类号:V412.41文献标识码:A文章编号:1671—5497(2007)06—1460—05
ErroraIlaIysisofpico。船tellite8ttitIldean毋eII,e嬲uren*ntbased伽唧et0Ineter
YuFa—xinl,zhengYang-min矿,xiechang.xion92,JinJia-jun2,JinZhong-he2
(1.D印州m册zo,A8㈣fifjⅡ一A5舯"dⅡffci,加巧i删g孤f卯描鲫.H4≈铲^o"310027,c^fn4f
2.m加r£优跏fD,
h,om8加≈口耐髓比加n缈&g:”胛一”g,矗町缸砧‰撕搿妇,协糟妇D”3l0027,吼i触)
Abstr眦t:Themethodofobtainingattitudean91ebythecomparisonofthemagneticfieldvectorfromactualmeasurementusing3一axismagnetometerwiththedataealculatedfr。morbitpropagationandInternatjonalGeomagneticReferenceField(IGRF)modelissuitableforPico—satelljteapplicationofsmallvoIume,1ightweight,andIowpowerconsumption.TheattitudeangIeerrorconsistsofmagneticfieldvectormeasurementerrorandmagneticfieldvectorcalculationerror.Aftertheanalysis,itwasclearthatA/Dconverter,magnetic5ensorerfor,temperature,nearbyferrousmaterials,etc.willresultinmeasurementerrorupto1.74。.Andthecalculatedm89neticfieldvector
盱rorisab。ut0.50whenKeplerorbitp∞pagatorandIGRFmodelwasused.Therefo抟,thetotal
attitudeangleerroris2.249.Keywords.basicdisciplinesofaer08PaceandtechnologyIpico-satelIite;3一a】【ismagnetometer’a“gle
erroranalysis
收稿日期:2006—09—17.基金项目:“973”国家重点基础研究发展规划项目(G1999033110)f高等学校全国优秀博士学位论文作者专项资金资助项目(200035)}教育部科学技术研究重点项目(104096).作者筒介:郁发新(1975一).男。副教授,博士.研究方向一数字信号处理,皮卫星系统和雷达系统设计.EfTmn}f'¨@iIl∞L自uedlL∞
通讯联系人一郑阳明(1977一),男.博士.研究方向:数字信号处理,皮卫星系统设计.E_mail:y眦heng@面耻m.动u.edu.cn
万方数据第6期郁发新,等:基于磁强计的皮卫星姿态角测量误差
皮卫星是以微机电系统(MEMs)技术和精密制造为基础的一种全新概念的公斤级微小卫星。虽然皮卫星技术还处在技术开发和试验阶段,但它成本低、体积小、重量轻、功耗低的优势使其在科学研究、商业应用上受到高度重视。但正是这些特点,许多常规姿态测量器件不能满足皮卫星的应用环境“’2]。而皮卫星应用一般不需要很高精度的角度信息,并且皮卫星受自身体积限制姿控能力也较弱,因此寻找一种简单易用具有一定精度的角度测量方法就能满足皮卫星姿态控制要求。随着地磁场模型的日趋完善,三轴磁强计比较适合皮卫星进行地磁场矢量实际测量,并与轨道演化计算得到的地磁场矢量相比较,获得皮卫星姿态角度信息口“]。传统磁强计的用法通常是与Kalman滤波器结合,自主确定轨道参数o“]。磁强计测量获得地磁场强度代人Kalman观测方程,利用轨道运动模型建立状态方程,计算获得微小卫星轨道参数。这种用法没有利用地磁场矢量角度信息,不能确定皮卫星姿态角。而作者利用三轴磁强计测得地磁场矢量角度信息来确定皮卫星姿态角度,因此地磁场矢量角度测量误差会影响姿态角度确定精度。本文重点分析由磁强计A/D采样、磁传感器误差、温度漂移、铁磁材料等因素导致的地磁场矢量角度测量误差。随着近地轨道模型理论的发展,现在有比较精确可靠的SGP4模型和高阶IGRF地磁场模型用于地磁场矢量计算n。]。但皮卫星体积小、重量轻、功耗低的特点不允许采用计算复杂、需要资源较多的sGP4轨道模型进行,只能采用的精度较低的Kepler轨道模型和近似的IGRF地磁场模型进行地磁场矢量计算,计算还将产生地磁场矢量计算误差。为此,作者通过研究实际测量的地磁场矢量误差和计算获得的地磁场矢量误差,最终获得皮卫星姿态角度误差。1皮卫星三轴磁强计设计三轴磁强计是一种可靠、廉价的姿态敏感器,可以分别测得不共面的三个方向上的地磁分量的强度,就能测得地磁矢量的方向和强度,由此可获得地磁参考矢量在卫星本体坐标系中的方位。皮卫星选用HONEYwEI。L公司的三轴磁强计模块HMC200301。如图1所示。它的最大优点是体积小、低功耗,非常适合皮卫星平台应用。HMc2003的三轴磁阻混合电路利用了3个玻莫合金磁阻桥路和电子接口电路来测量磁场的方向和强度。传感器的磁敏感方向分别沿着双列直插混合电路的长、宽、高(XyZ)3个方向。测量范围为40pG~2G。电路同时输出对应于xYz轴的模拟量。利用混合电路的线性度和灵敏度通过测量地磁的变化可提供皮卫星姿态。混合电路具有较高的带宽,可用于测量高速运动的皮卫星所在位置的地磁场矢量。
幽lHM髓帅3梗块Fi磐1M0duIeofHMC2003基于HMC2003模块设计的三轴磁强计组成框图如图2所示。HMc2003模块输出的对应于xyZ轴磁场强度的电压,8051单片机控制口位A/D进行采样并将采样后的数据送至姿态控制计算机,用于姿态角计算。电源模块主要给HMc2003、ADC和单片机供电。EEPROM存放单片机控制程序。
计算机凰2基于HMc2帅3横块的三轴磁强计组成框图F培2str呲tⅡ婵0f3-axis砌gⅡe岫eterba辨d∞HMC2003
2皮卫星三轴磁强计测角误差分析(1)A/D采样产生的测角误差假设待测地磁场矢量强度为L,△L是x、y、z三轴中A/D采样误差的最大值,如图3所示。当△L垂直于地磁场矢量时,角度误差最大,定义该误差为地磁场矢量测角误差血,计算式为
△口一arctan(△L/L)(1)
万方数据吉球大学学报(工学版)第37卷圈3地磁场矢■角度误差模型Fi备3A哩ker卅m删dofm印etitmMv眦t吖
A/D转换器主要包台两项误差:量化台阶和A/D采样非线性。A/D转换器采用TI的TLc2558芯片,位数为12位,有效位为11位,利用公式(1)获得的A/D非线性和A/D量化台阶带来的测角误差为
△oA,D—arctan(21/2”+21/212)≈0.06。(2)(2)磁传感器产生的测角误差尽管玻莫台金磁阻是性能优异的磁传感铝,可以很可靠地分辨小于o.04mG的磁场,而且增益误差和偏移可以被补偿,但传感器噪声、线形度、重复性、电源电压波动误差是磁传感器固有的误差,不能够被补偿掉。利用HMc2003模块的数据手册和式(1)角度误差公式,可以获得如表1所示的碰传感器误差带来的测角误差。襄l磁传毫嚣误差带来的翻角误差Ta№lAn咖HT"0fⅢ鲫岫枷”
娄鼓最太误差值磁场误差/mG耐角误差/(。)
(3)温度漂移产生的测角误差温度对磁阻传感器的影响主要包括:灵敏度温度系数和温度漂移。实验发现温度变化时,磁阻传感器x、y和Z轴地磁场分量等比例变化,因此在矢量角度的计算中,灵敏度温度系数变化因素可以相互抵消,无需考虑。磁传感器的温度漂移不存在等比例变化特征,因此对地磁场矢量测角存在影响。在
HMc2003磁阻传感器模块中采用set/Reset技术口],可在一定程度上消除磁阻传感器与运算放大器温度漂移,整流传感器和运算放大器偏移电压也可消除外部磁场对传感器产生的非永久性影响,提高磁强计测量磁场的线性度和重复性。在Set/Reset模式下,通过一个交流耦合驱动器产生双向对称电流脉冲,对应正负向的磁场强度+H/一H。在正式测量地磁场以前,首先施加set脉冲,相当于施加+H的磁场强度,输出电压为V乙。;然后施加Reset脉冲,相当于施加一H的磁场强度,输出电压为y…(如图4所示),则
有方程组fV。。=+HS+y埘…1V乙。。=一Hs+V。
幽鲁
霉田彝
田4set/R黜t电路输出矾g.4outputofset/R船etcirc叫l
由式(3)可以解得磁阻传感器的偏移和灵敏
度。通过set/Reset方式可以使磁阻传感器读数受温度的影响小于100ppm/℃。皮卫星通过被动热控技术,使温度控制在一5~45℃范围内,因此利用式(1)可以获得温度漂移导致的地磁场矢量测角误差为加T—arctan(O.0001×50)≈O.29。(4)
(4)铁磁材料产生的测角误差铁磁材料干扰分为硬铁干扰和软铁干扰。硬铁干扰产生于永久磁铁和被磁化的金属。这些干扰会保持大小和指向恒定。在零磁场环境中,硬铁干扰能够被准确测得,可以被补偿掉,它带来的误差近似为零。软铁干扰来源于地球磁场和磁强计附近的任何磁性材料之间的相互作用,像硬铁材料一样,软