5989-7743CHCN 用于雷达和电子战系统的先进设计系统连接解决方案
E+H固体雷达料位计FMR56,57
目录
Micropilot FMR56, FMR57
重要文档信息 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 文档符号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 功能与系统设计 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 测量原理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 输入 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 测量变量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 测量范围 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 工作频. . . . . . . . . . . . . . . . . . . . . . 8 发射功率 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 输出 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 输出信号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 报警信号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 线性化功能 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 电气隔离 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 通信规范参数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 电源 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 接线端子分配 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 仪表插头 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 供电电压 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22 功率消耗 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24 电流消耗 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24 电源故障 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 电势平衡 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 接线端子 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 电缆入口 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 电缆规格 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 过电压保护 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26 性能参数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 参考操作条件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 最大测量误差 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 测量值分辨率 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 响应时间 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 环境温度的影响 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 安装 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29 安装条件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29 测量条件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35 在容器中安装(自由空间) . . . . . . . . . . . . . . . . . . . . . . . 36 带保温层的容器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45 环境条件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46 环境温度范围 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46 环境温度范围 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46 储存温度 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50 气候等级 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50 海拔高度符合 IEC61010-1 Ed.3 标准 . . . . . . . . . . . . . . . 50 防护等级 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50 抗振性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50 清洗天线 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50 电磁兼容性(EMC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
第三版 IO-Link 手册说明书

IO-Link手册第三版请访问:/CN目录引言第4页第1部分:IO-Link简介第5页◆老派传感器第5页◆微型开关量传感器驱动第5页◆I O-Link:开放式低成本传感器接口第5页◆I O-Link节点第5页◆I O-Link系统第6页◆I O-Link接口在IEC 61131-9中被标准化为SDCI第6页◆物理层IO-Link标准化接口第6页◆物理层电气规范第7页◆自动化体系中的IO-Link第7页◆I O-Link:实现智能传感器第7页◆工业传感器生态系统第8页第6部分:提高系统性能第24页◆散热第24页◆测试A第24页◆测试B第24页◆测试C第24页◆热性能第24页◆分立解决方案第25页◆集成解决方案第25页◆选择TVS二极管第25页◆I O-Link保护电路第25页◆65 V(绝对最大值)如何帮助提供保护(对比40 V)第25页◆65 V绝对最大值的保护优势第25页◆小结第26页◆I O-Link信号摆率如何影响IO-Link电缆辐射?第26页引言当今的无风扇可编程逻辑控制器(PLC)和IO-Link®网关系统须消耗大量功率,具体取决于I/O配置(IO-Link、数字输入/输出、模拟输入/输出)。
随着这些PLC演变成新的工业4.0智能工厂,我们必须深谋远虑,实现更智能、更快速、更低功耗的解决方案。
这场革命的核心是一项名为“IO-Link”的新技术,能帮助实现灵活制造,从而改善工厂吞吐量,提高运营效率。
这项激动人心的新技术正使传统传感器转变为智能传感器。
ADI公司提供一系列先进的工厂自动化解决方案,并通过我们的IO-Link技术产品系列进一步改进性能,为实现工业4.0铺路架桥。
MAX22513是该产品系列的最新成员,这是一款微型双通道IO-Link收发器,集成了浪涌保护和DC-DC转换器,可减少热耗散并提高工厂车间传感器的稳定性。
为了帮助我们的客户缩短上市时间,我们与来自IO-Link联盟的软件协议栈供应商合作开发了一系列经过全面验证和测试的参考设计,本手册对此进行了详细说明。
E+H雷达物位计FMR50

• 介质类型和过程条件改变时,仍可进行可靠测量 • HistoROM 数据管理,便于调试、维护和诊断 • 多路回路跟踪确保最高可靠性 • SIL2 认证,符合 IEC 61508 标准;同构冗余或异构冗余系统的安全等级可达
SIL3 • 无缝集成至控制系统或资产管理系统中 • 本国语言显示的直观用户界面 • 符合 SIL 和 WHG 要求的简便的功能验证
目录
Micropilot FMR50
重要文档信息 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 文档符号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 功能与系统设计 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 测量原理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 输入 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 测量变量 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 测量范围 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 工作频率 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 发射功率 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 输出 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 输出信号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 报警信号 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 线性化 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 电气隔离 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 通信规范参数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 电源 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 接线端子分配 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 仪表插头 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24 供电电压 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 功率消耗 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 电流消耗 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 电源故障 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 电势平衡 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 接线端子 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 电缆入口 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 电缆规格 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29 过电压保护 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30 性能参数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31 参考操作条件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31 最大测量误差 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31 测量值分辨率 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32 响应时间 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32 环境温度的影响 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32 安装条件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 安装条件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 测量条件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37 在容器中安装(自由空间) . . . . . . . . . . . . . . . . . . . . . . . 38 在导波管中安装 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42 在旁通管中安装 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45 带保温层的容器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48 环境条件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49 环境温度范围 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49 环境温度范围 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49 储存温度 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50 气候等级 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50 海拔高度符合 IEC61010-1 Ed.3 标准 . . . . . . . . . . . . . . . 50 防护等级 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50 抗振性 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50 清洗天线 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50 电磁兼容性(EMC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50 2
“萨德”X波段ANTPY-2雷达参数,探测距离计算,搜索模式及其对抗思路

“萨德”X波段AN/TPY-2雷达参数、探测距离计算、搜索模式及其对抗思路萨德(THAAD),末段高空区域防御系统,是美军先进的导弹防御系统。
末段高空区域防御系统由携带8枚拦截弹的发射装置、AN/TPY-2X波段雷达、火控通信系统(TFCC)及作战管理系统组成。
它与陆基中段拦截系统配合,可以拦截洲际弹道导弹的末段,也可以与“爱国者”等低层防御中的“末段拦截系统”配合,拦截中短程导弹的飞行中段,在美国导弹防御系统中起到了承上启下的作用。
X波段AN/TPY-2有源相控阵雷达AN/TPY-2高分辨率X波段固态有源相控阵多功能雷达是THAAD系统的火控雷达,是陆基移动弹道导弹预警雷达,可远程截获、精密跟踪和精确识别各类弹道导弹,主要负责弹道导弹目标的探测与跟踪、威胁分类和弹道导弹的落点估算,并实时引导拦截弹飞行及拦截后毁伤效果评估。
AN/TPY-2雷达采用了先进的雷达信号处理技术以及薄化的相控阵天线技术,使其探测波束不但功率大而且非常窄,因此分辨率非常高,对弹头具有跟踪和识别能力,对装备诱饵突防装置的弹道导弹具有很大威胁。
除了探测距离远、分辨率高之外,还具备公路机动能力,雷达还可用大型运输机空运,战术战略机动性好,其战时生存能力高于固定部署的雷达。
雷达探测距离分析结合网上关于“萨德”的AN/TPY-2雷达的基本参数和具有一定合理性的假设来分析萨德在前置部署模式(Forward-Based Mode,FBM)和末端部署模式(Terminal Mode,TM)下由雷达方程计算出的最大探测距离。
在使用公式之前,需要分析一些众所周知的参数的合理性,数据是否精确不重要,重要的是计算方法和涉及的理论知识。
雷达波长(9.5GHz)TPY-2雷达工作在X波段,频段范围8~12GHz,众多报道都说是9.5GHz,那就用这个计算好了。
天线增益G(48.77dB)天线孔径面积9.2m2,拥有72个子阵列,每个子阵列有44个发射/接收微波接口模块,每个模块有8个发射/接收组件,72x44x8=25344个阵元。
IEEE标准列表
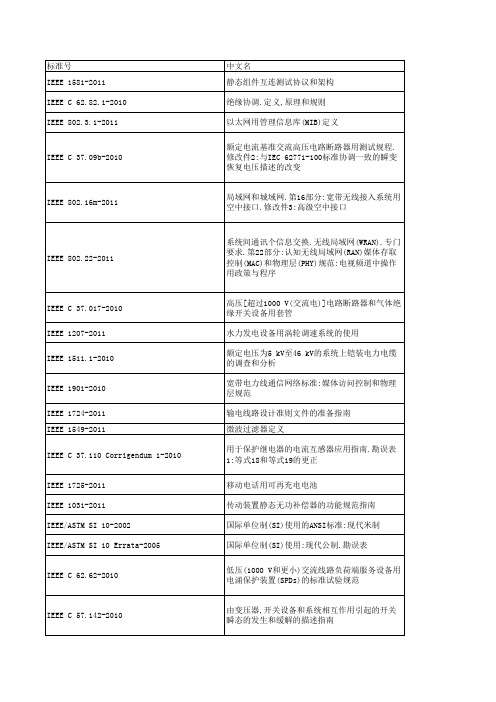
IEEE NESCIR551-2009
IEEE NESCIR550-2008 IEEE NESCIR549-2008 IEEE NESCIR548-2009 IEEE NESCIR547-2008 IEEE NESCIR546-2007 IEEE NESCIR545-2007 IEEE NESCIR544-2007 IEEE N42.48-2008
IEEE 1636.2-2010
IEEE 1609.4-2010 IEEE 1410-2010 IEEE C 63.10-2009 IEEE C 57.19.00 Errata-2010 IEEE C 57.12.00-2010 IEEE C 37.90.1 Errata-2003 IEEE C 37.46-2010 IEEE C 37.239-2010 IEEE C 37.13.1a-2010 IEEE 82 Errata-2009
第38节:法规384C设备接地与连接
第21节.法规215C1非载流部件的一般要求.总论
说明.第21节:电路、支撑结构和设备的接地 215C5b规则的一般要求.非流动运输部分
第21节:法规215C1接地电路、支持结构和设备的 一般要求.非载流部件.总论
第26节:强度要求 说明.第1节:现有设备的国家电气安全规程规则 013B3应用(2007版本,第2页)(26-3-2009) IR548
应用在电力输电和配电系统中的大功率电子器件 (1 MW或更大)控制结构用指南
38 kV以上高架配电系统野生动物防护设施的电 气,机械和耐用性能测试指南
降低鸟类引起的断电指南
基于ADSP-TS201的/雷达恒虚警实现
基于ADSP-TS201的/雷达恒虚警实现2009-09-04 17:55:18 作者:来源:浏览次数:18 文字大小:【大】【中】【小】1 引言雷达恒虚警(CFAR-Constant False Alarm Rate)在雷达系统中有着重要的作用和地位。
恒虚警处理可以避免杂波变化影响的检测阈值,提高雷达在各种干扰情况下的检测能力。
美国模拟器件公司(ADD的ADSP-TS201处理器具有高速运算能力、可时分复用、并行处理、数据吞吐率高等特点。
该处理器片内集成大容量存储器,性价比高,并兼有ASIC 和FPGA的信号处理性能、指令集处理器的高度可编程性与灵活性,适用于高性能、大存储量的信号处理和图像应用。
本文主要讨论基于ADSP-TS201的恒虚警实现方法。
2 ADSP-TS201简介ADSP-TS201采用超级哈佛结构,静态超标量操作适合多处理器模式运算,可直接构成分布式并行系统和共享存储式并行系统。
ADSP-TS201的主要性能指标如下:最高工作主频600 MHz(1.67 ns指令周期);支持IEEE浮点格式32 bit数据和40 bit扩展精度浮点格式。
同时支持8/16/32/64 bit 的定点数据格式;允许128 bit的数据、指令和I/O端口访问,内部存储器带宽33.6 GB/s;32 bit的地址总线提供4 G的统一寻址空间;14通道的DMA控制器支持硬件和软件中断,支持优先级中断和嵌套中断;4个全双工LINK端口支持最达500 MB/s的传输速度;JTAG仿真接口允许多片DSP仿真。
3 ADSP-TS201与TS101性能比较ADSP-TS201与ADSP-TS101相比,主要在运行速度、存储器结构和链路口结构上有差别,如表1所列。
通过比较可以看出ADSP-TS201的性能比较好,故选用ADSP-TS201实现雷达恒虚警检测。
4恒虚警检测原理4.1选大单元平均CFAR(GO-CFAR)云雨杂波和低分辨率雷达的海浪和地物杂波的包络服从瑞利分布,其概率密度函数为:门限VT一旦确定,背景噪声(干扰)和杂波干扰会使虚警概率增加,因此恒虚警处理十分必要。
丹麦眼镜蛇雷达已公开资料
丹麦眼镜蛇雷达背景“丹麦眼镜蛇”(AN/FPS-108)是一部巨大的大功率相控阵雷达,位于Aleutian群岛西端的Shemya岛上(北纬52.7°,东经174.1°)。
雷达的阵面法线方向为319°(即正北往西41°),与地平线夹角为20°。
“丹麦眼镜蛇”于1977年投入使用,起初的主要任务是监视前苏联的弹道导弹试验,辅助进行预警和空间监视。
在20世纪90年代初,美国对“丹麦眼镜蛇”进行了一次大的改进,并在随后进行多次改进。
在1994年4月之前,“丹麦眼镜蛇”一直和空间监视网络(SSN)连接,为空间监视网络的一部分。
后来由于预算的原因,它与空间监视网络通信中心的连接被关闭了。
在此之前,操作过程(尤其是对其低海拔监视范围的界限)限制了它可检测的空中目标的尺寸。
后来在1999年进行的实验证明了它在跟踪空间小碎片方面的能力,因此于1999年10月,它又被重新连接到了空间监视网络。
但是为了降低运行成本,“丹麦眼镜蛇”将占空比从6%降至1.5%,其功率降为额定功率的1/4,以便减少发射功率。
当有弹道导弹试验时,它能够在30秒内恢复到全功率工作状态。
从2003年3月开始,“丹麦眼镜蛇”重新开始全功率工作,成为空间监视网络中的一个探测器。
“丹麦眼镜蛇”还被纳入了美国陆基中段防御(GMD)国家导弹防御系统。
技术性能“丹麦眼镜蛇”雷达的天线直径为29m,共有34768个单元,其中15360为有源单元,其余为无源单元。
有源单元在阵面按锥形递减的方式排列,阵面边缘有源天线的密度为中心的20%。
为了获得高的距离分辨力,天线单元被分为96个子阵,每个子阵有160个辐射单元,发射时由行波管(TWT)进行供电(96个TWT)。
雷达的峰值功率为15.4MW,平均功率为920kW,最大占空比6%,波束宽度为0.6。
按照最初的构造,宽带模式下,“丹麦眼镜蛇”使用脉冲宽度为1ms,带宽为200MHz (利用线性调频脉冲压缩得到)的宽带波形,频率在1.175~1.375GHz之间,但是这种信号仅限于视线角小于22.5的情况。
先进制程芯片在轨飞行验证通用系统设计
Vol. 40, No. 6航 天 器 环 境 工 程第 40 卷第 6 期650SPACECRAFT ENVIRONMENT ENGINEERING2023 年 12 月https:// E-mail: ***************Tel: (010)68116407, 68116408, 68116544先进制程芯片在轨飞行验证通用系统设计王红霞1,刘鸿瑾1,2*,张绍林1,2,李 宾1,徐 建2,马远航1,于薇薇1,付宝玲1,刘迎辉3,邓 峥3,张雷浩3(1. 北京轩宇空间科技有限公司,北京 100104; 2. 北京控制工程研究所; 3. 中国空间技术研究院:北京 100094)摘要:中国空间站的建立为国产先进制程芯片提供了真实的在轨飞行验证条件。
为实现不同种类、不同型号国产先进制程电子元器件在空间辐射环境中的验证,设计了一种通用的在轨飞行验证系统。
系统采用“主控单元+试验单元”的平台架构,运用在轨可更换模块和可重构的系统设计,支持航天员定期在轨更换试验模块以完成验证任务的在轨升级。
文中给出系统的硬件设计、软件数据管理机制以及在轨飞行验证结果。
结果表明,该系统设计有效,成功完成了16 nm FinFET、28 nm亿门级FPGA、高速DAC 等10类20余款国产先进制程芯片的在轨工作监测,可为国产先进制程芯片空间适用性研究提供参考。
关键词:先进制程芯片;空间辐射环境;空间适用性;在轨飞行验证;系统设计中图分类号:V417+.3文献标志码:A文章编号:1673-1379(2023)06-0650-07 DOI: 10.12126/see.2023044Design of a universal system for in-orbit flight verification ofadvanced process chipsWANG Hongxia1, LIU Hongjin1,2*, ZHANG Shaolin1,2, LI Bin1, XU Jian2, MA Yuanhang1, YU Weiwei1,FU Baoling1, LIU Yinghui3, DENG Zheng3, ZHANG Leihao3(1. Beijing Sunwise Space Technology Co., Ltd., Beijing 100104, China;2. Beijing Institute of Control Engineering;3. China Academy of Space Technology: Beijing 100094, China)Abstract: The establishment of China’s space station provides real in-orbit flight verification conditions for domestic advanced process chips. To realize the verification of different types and models of advanced process domestic chips in space radiation environment, a universal in-orbit verification system was designed. The system adopts a platform architecture of “main control unit + test unit”, as well as a scheme of in-orbit replaceable module and reconfigurable system design, allowing astronauts to regularly complete in-orbit upgrades of chips. This paper describes the hardware design of the system, the software data management mechanism and the in-orbit flight verification results. It is indicated that the proposed design is effective, for with the design, in-orbit monitoring of more than twenty types of domestic chips in ten categories were successfully completed, including the 16 nm FinFET, the 28 nm billion gate FPGA, and the high-speed DAC. This study may provide a reference for the research on the aerospace applicability of domestic advanced process chips.Keywords: advanced process chips; space radiation environment; space applicability; flight verification; system design收稿日期:2023-04-06;修回日期:2023-11-30基金项目:空天高性能处理器芯片北京市工程研究中心创新能力建设项目(编号:202110102651302615)引用格式:王红霞, 刘鸿瑾, 张绍林, 等. 先进制程电子元器件在轨飞行验证通用系统设计[J]. 航天器环境工程, 2023, 40(6): 650-656WANG H X, LIU H J, ZHANG S L, et al. Design of a universal system for in-orbit flight verification of advanced process chips[J]. Spacecraft Environment Engineering, 2023, 40(6): 650-6560 引言空间环境充满来自各种高能粒子和射线的辐射,辐射效应可能导致某些航天器集成电路(IC)芯片的失效。
24GHz FMCW雷达收发器芯片组的特点与应用介绍
24GHz FMCW雷达收发器芯片组的特点与应用介绍本文介绍了适于汽车和工业传感器应用的24GHz FMCW雷达收发器芯片组,ADF5904搭配IC (发射机ADF5901芯片和ADF4159 PLL)使用兼具高性能相位噪声、输出功率和高速斜坡能力,使该器件针对传感器具有更低的噪底性能。
ADF5904:4通道、24GHz接收机下变频器MMICADF5904集成式多通道接收机下变频器具有10dB噪声系数性能,优于竞争型对手器件3dB。
该器件功耗低50% ,采用小型、性价比高的5mm×5mm LFCSP塑料封装。
该器件的四个片内接收通道采用简单的单端连接与四个独立天线相连,从而简化了射频传输线设计和PCB布局布线,同时缩小了电路板尺寸。
接收机下变频器可同时直接放大并转换4路24GHz接收机信号,以产生高质量、高幅度基带信号或降低频率信号,以便轻松连接ADI 4通道模数转换器或模拟前端(AFE)。
ADF5904还提供集成式温度传感器,无需使用分立式检测元件,这些元件原本可能需要在系统装配和测试期间占用额外的时间与资源来校准。
ADF5904针对采用数字波束成形的多通道接收机高频应用设计,如汽车ADAS雷达、微波雷达传感器和工业雷达系统,在这些应用中,能效正在成为越来越重要的系统级设计考虑因素。
ADF5904 24GHz接收机具有同类一流的接收机灵敏度,相比竞争型RF IC技术整体功耗更低,因而适合此类应用以及其它传感器应用。
主要特性4 个接收通道,接收机通道增益:22dB;噪声系数:1 0 d B ,P 1 d B :-10dBm;功耗:0.5mW(全部4个通道开启);LO输入范围:-8dBm至+5dBm;接收机至IF隔离:30dB;RF信号带宽:250MHz;。
基于Qt和ARINC429总线的航电仿真系统设计与实现
计算机工程应用技术本栏目责任编辑:梁书基于Qt 和ARINC429总线的航电仿真系统设计与实现王嘉颖,杨榛,程耀,李兴,霍凯(上海航天电子技术研究所,上海201109)摘要:针对机载雷达研制过程中的实际调试需要,设计了用于模拟机上航电系统数据收发的航电仿真系统;对航电仿真系统的设计过程及ARINC429总线进行介绍,并使用Qt 自定义控件开发GUI 界面;测试表明,基于Qt 自定义控件和ARINC429总线的航电仿真系统性功能有效,满足机载雷达调试过程中的数据模拟需求。
关键词:GUI 界面;航电仿真系统;ARINC429总线中图分类号:TP311文献标识码:A文章编号:1009-3044(2021)12-0241-03开放科学(资源服务)标识码(OSID ):对于雷达而言,研制过程中各分系统的通信接口调试是必不可少的,而机载雷达在交付整机前不具备与机上航电设备的实装进行通信接口调试的条件,并且,这些外部输入是雷达正常工作的必要条件,所以,一个能在地面配合雷达处理单元进行通信接口调试,模拟各个外部设备数据收发的航电仿真设备就显得尤为必要。
航电设备通常使用ARINC429总线进行信息传输,例如波音737、757和767系列、空客A310/A320等。
本文结合ARINC429总线与Qt 自定义控件,设计了一套模拟机载航电设备数据收发的航电仿真系统,测试表明,该系统满足机载雷达研制过程中的外部数据模拟需求。
1系统设计航电仿真系统主要用于在雷达交付主机前在实验室环境中为某机载雷达提供输入的测试激励,并验证其输出的状态和数据是否正常。
主要工作原理为在加固笔记本的平台下,通过GUI 界面进行数据输入并发送给雷达处理单元,完成对雷达的状态和数据的验证。
1.1系统结构图1系统框图航电仿真系统可以分为硬件平台和模拟器软件两部分,硬件平台由一台装有ARINC429板卡,配备x86平台和Windows7操作系统的便携式加固机构成,模拟器软件运行于该硬件平台上。