“慧鱼模型”三自由度机械手
三自由度机械手臂实验报告书
苏州大学2013级机械电子专业《机电一体化》实验报告书学生姓名:学号:指导教师:机电工程学院2013.111 实验目的培养学生设计、修改方案并掌握利用模型进行检验方案是否正确。
2 实验原理在进行机构或产品的创新设计时,往往很难判断方案的可行性,如果把全部方案的实物都直接加工出来,不仅费时费力,并且很多情况下设计的方案还需模型来进行实践检验,所以不能直接加工生产出实物。
现代的机械设计很多情况下是机电系统的设计,设计系统不仅包含了机械结构,还有动力、传动和控制部分,每个工作部分的设计都会影响整个系统的正常工作。
全面考虑这些问题来为每个设计方案制作相应的模型,无疑成本是高昂的,甚至由于研究目的、经费或时间的因素而变为不可能。
慧鱼创意组合模型由各种可相互拼接的零件组成,由于模型充分考虑了各种结构、动力、控制的组成因素,并设计了相应的模块,因此可以拼装成各种各样的模型,可以用于检验学生的机械结构设计和机械创新设计。
3 实验设备和工具慧鱼创意组合模型、电源、计算机、控制软件等。
4 实验准备工作熟悉慧鱼创意组合模型的拼装,领取模型。
5 实验方法与步骤1)根据教师给出的创新设计题目或范围,经过小组讨论后,拟定初步设计方案。
2)将初步设计方案交给指导教师审核。
3)审核通过后,按比例缩小结构尺寸,使该设计方案可由慧鱼创意组合模型进行拼装。
4)选择相应的模型组合包。
5)根据设计方案进行结构拼装。
6)安装控制部分和驱动部分。
7)确认连接无误后,上电运行。
8)必要时连接电脑接口板,编制程序,调试程序。
步骤为:先断开接口板、电脑的电源,连接电脑及接口板,接口板通电,电脑通电运行。
根据运行结果修改程序,直至模型运行达到设计要求。
9)运行正常后,先关电脑,再关接口板电源。
然后拆除模型,将模型各部件放回原存放位置。
6慧鱼创意组合模型的说明1)构件的分类慧鱼创意组合模型的构件可分成机械构件、电器构件、气动构件等几大部分。
机械构件主要包括:齿轮、连杆、链条、齿轮(圆柱直齿轮、锥齿轮、斜齿轮、内啮合齿轮、外啮合齿轮)、齿轮轴、齿条、蜗轮、蜗杆、凸轮、弹簧、曲轴、万向节、差速器、齿轮箱、铰链等。
慧鱼实验报告---精品模板

慧鱼机器人模型组装综合实验施。
五、实验步骤(1)慧鱼模型名称及工作过程避障机器人(2)模型组件选择柱、块:固定支撑和机器人实体搭建;板:一侧具有平滑表面,通常用于制作平台或装饰;轮孔条:可用于轴、连杆等组件的支撑;连接件:在结构制作中起到衔接的作用。
连杆、链条、履带、齿轮、齿条、涡轮、蜗杆、凸轮、弹簧、曲轴、万向节等9V双向直流电机、按钮、灯、接线插头、光敏晶体管、电磁阀、接口板等储气罐、气缸、活塞、气弯头、电磁气阀、气管(3)模型组件组装【提示】:①各个组件之间是如何连接的;②组件连接中有哪些注意事项.可以附模型装配图。
构件连接方式:基本构件采用燕尾槽插接方式连接,可实现六面拼接,可多次拆装。
确保构件要到位,不滑动;注意电子元件正负极,接线稳定可靠不松动;整体美观,布线规范。
(4)接线电路连接:通信线路连接:①USB口连接方式:需要安装硬件驱动;②串口连接:硬件不支持热拔插,须关闭计算机后再进行硬件连接。
(5)端口设置及硬件调试路径一、菜单“选项”下的“设置接口"菜单;路径二、工具条上“检查接口和终端”按钮。
弹出端口设置对话框,在“端口"下拉列表中选择连接的接口,其他参数默认。
如果不知道端口号,可以在系统硬件信息中查看。
完成端口设置之后,可进行硬件的测试:路径一、菜单“选项”下的“检查接口”菜单;路径二、工具条上“检查接口和终端"按钮。
弹出“检查接口”对话框:M1~M4用鼠标点击,如果输出组件是电机,可以用左键和右键分别点击测试按钮,可以实现电机的不同转动方向;E1~E8连接按钮,E1~E8连接光敏晶体管(分别演示)。
在后面的编程中,需要使用数字量输入/输出接口号,因此硬件测试不仅仅是为了测试电路、通信线路连接是否正常,同时也是记录数字量输入/输出接口号与机器人关节控制之间的关系。
(6)程序设计打开LLWin软件,点击新建按钮,进入程序编辑界面。
右侧有一个浮动的窗体,窗体名为工具箱。
基于ROBO PRO软件的三自由度机械手圆弧轨迹的研究
2 三 自 由 度 机 械 手 的 组 成 及 工 作 原 理
机械 手 主要 由执 行机 构 、 驱动 系 统 以及位 置检 测 装 置等 组 成 。 执行 机 构主 要 包括 手部 和运 动机 构 ,手 部是 用 来抓 持工 件 ( 工 或 具) 部件 ; 动 机 构使 手 部 完成 各 种 转 动 ( 动) 移 动 或 复合 运 的 运 摆 、 动来 实现 规 定 的动 作 , 改变被 抓 持物 件 的位 置和 姿势 。 动 机构 的 运 升 降 、 缩 、 转 等 独立 运 动 方 式被 称 为机 械 手 的 自由度 , 过 慧 伸 旋 通 鱼 模 型搭 建 的机 械 手分 别存 在 旋转 ( 轮蜗 杆机 构) 升 降 ( 涡 、 螺旋 机
量 sjue 坌 hi n e Fx y
基于 R B R O OP O软 件 的三 自由度机械 手圆弧轨迹 的研 究
李东亚 宋 天 麟
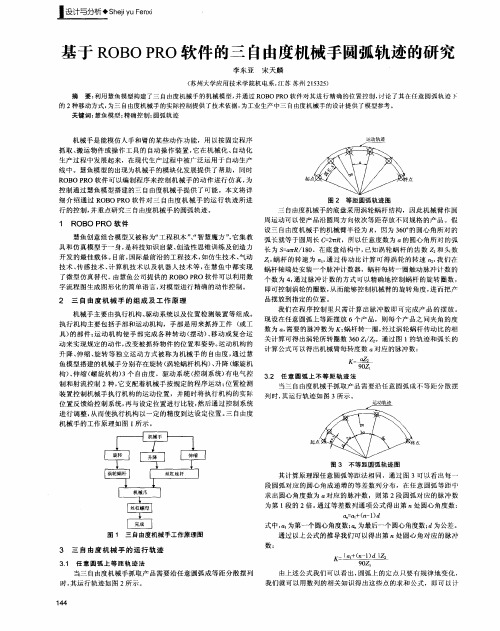
( 苏卅f 大学应用 技术学院机电系 , 苏 苏州 2 5 2 ) 江 13 5 摘 要: 利用慧鱼模型构建 了三 自由度 机械手 的机 械模型 , 并通 过 RO BOP O软件对其进 行精确 的位 置控制 , 论了其在任意 圆弧轨迹 R 讨
的 2种移 动方式, 为三 自由度机械手 的实际控 制提供 了技术依据 , 为工业生产中三 自由度机械手 的设计提 供了模型参考。
关键词 : 慧鱼模型; 精确控制; 圆弧轨迹
机 械 手是 能模 仿人 手 和臂 的某 些动 作 功 能 ,用 以按 固定 程 序 抓 取 、 运物 件 或 操作 工 具 的 自动 操 作装 置 , 搬 它在 机 械 化 、 自动化 生产 过程 中 发展起 来 ,在 现代 生产 过程 中被广 泛运 用 于 自动 生产
慧鱼实验_精品文档

慧鱼实验21世纪将是个全面创新的时代,如何培养、提升现代学生的创造力、想象力与科学技能,来迎接这个竞争的时代微型组合机器人能实现多种控制方式及多种模型设计,适合于机电一体化、工业自动控制、机械创新等课程,推荐采用PLC控制技术。
微型组合机器人配有教材,图文并茂、浅显易懂,对每一个模型都作深入浅出的原理说明、功能解释,鼓励学生举一反三、活学活用,让他们不断发展创新。
微型组合机器人是通过各种各样的构件(功能模块)组合拼装而成,因此,“构件”是模型的最小组成部分。
实验一计算机组合包创意实验设计一实验目的:1、熟悉慧鱼模型的各个模块。
2、了解三自由度机器人的基本结构。
3、能够运用计算机编程,合理控制机器人的运动。
4、能进行简单创意实验设计。
二实验器材:慧鱼计算机组合包一套慧鱼专用电源一套PC机一台LLWIN软件一套接口电路板一块三实验原理:如图所示(见附图):为一三自由度机器人,能够实现搬运工件的作用,三自由度机器人包括腰部、大臂以及夹钳。
腰部能够实现左右旋转运动,大臂能够实现上下的俯仰运动,夹钳则能够实现夹取物体。
该三自由度机械人总共涉及到6个行程开关以及3个电动机,其中M1驱动腰部旋转,M2驱动大臂俯仰,M3驱动夹钳的关闭。
E1用于限定夹钳的开闭位置,E2用于腰部旋转进行计数,E3限定了大仰起后的极限位置,E4用于夹钳的驱动轴旋转次数进行计数,E5对大臂处的蜗杆旋转次数进行统计,E6限制腰部旋转的极限一些置。
四实验内容1、按照装置图组装出机器人。
2、按照连线图将机器人各部与计算机数据线连好。
3、用计算机中的软件(LLWIN)对机器人进行控制操作。
(1)对各个部分进行检测:M1M2M3E1E2E3E4E5E6全部测试通过后再进行以下实验内容。
(2)调试出控制程度,进行连续操作。
4、对软件进行改编,使机器人实现更多的功能。
(1)实现夹取与放置的换位。
(2)改变大臂运动轨迹。
五实验思考题1、单个测试腰部可旋转,但整体测试时腰部却不按程序规定的运行,可能是什么原因2、大臂可以俯仰,但程序并不向下运行,会是什么原因3、夹钳不能开闭,会是什么原因4、如何实现运动轨迹投射到平面后为非矩形实验二移动机器人创意实验设计一实验目的:1、了解移动机器人的基本结构2、能够运用计算机编程,控制移动机器人的运动3、进行创意实验设计二实验器材:慧鱼移动机器人组合包一套慧鱼专用电池盒一个或专用电源一套PC机一台(要求:486、66以上,8M以上内存,空闲的LPT2口)LLWIN专用软件一套,(WINDOS3、1以上或WINDOWS95)接口电路板一块电缆若干三实验原理如图所地:为一跟踪光源移动机器人,能够跟踪光源而运动。
慧鱼模型工业机械手设计

摘要慧鱼创意组合模型主要有组合包、培训模型、工业模型三大系列,涵盖了机械、电子、控制、气动、汽车技术、能源技术和机器人技术等领域和高新学科,利用工业标准的基本构件(机械元件/电气元件/气动元件),辅以传感器、控制器、执行器和软件的配合,运用设计构思和实验分析,可以实现任何技术过程的还原,更可以实现工业生产和大型机械设备操作的模拟,从而为实验教学、科研创新和生产流水线可行性论证提供了可能,世界知名的德国西门子、德国宝马、美国IBM等一大批著名公司都采用慧鱼模型来论证生产流水线。
AbstractFischer creative combination model mainly include the combination packages, training mode , industrial model three series, covers the mechanical, pneumatic, automotive, electronics, control technology, energy technology and robot technology, and high and new disciplines, using industrial standard of the basic building blocks (mechanical components/electrical components, pneumatic components), supplemented by sensor, controller, actuator and software, using design and experimental analysis, can implement any reduction of technology process, more can realize industrial production and the simulation of large mechanical equipment operation for feasibility experiment teaching, scientific research and innovation and production lines provides a possible, world famous Germany Siemens, Germany's BMW, the United States a large number of famous companies such as IBM model is used to demonstrate the production assembly line.目录摘要 (I)1 绪论 (1)1.1慧鱼创意模型实验介绍 (1)1.2机械手的组成和分类 (4)1.2.1 机械手的组成 (4)1.2.2 机械手的分类 (7)1.3机器人领域的未来发展趋势 (8)1.4课题的提出及主要任务 (9)1.4.1 课题的提出 (9)1.4.2 课题的主要任务 (10)2 机械手的设计方案 (11)2.1工作原理 (11)2.1主要机构构件的介绍 (12)2.2.ROBOP RO的介绍 (14)2.3如何编程 (15)3组装过程 (23)6 结论 (26)致谢 (28)1 绪论1.1 慧鱼创意模型实验介绍1964年,慧鱼创意教学组合模型(fischertechnik)诞生于德国,是由德国发明家Arthur Fischer 博士在 1964 年从其专利“六面拼接体”的基础上发明的。
基于PLC的3自由度机械手的控制系统

第29卷第3期2008年6月华 北 水 利 水 电 学 院 学 报Journa l of Nort h China Institut e of W ate r Conservancy and Hydroe l ec tric Powe rVol 129No .3 Jun .2008收稿日期作者简介刘晓燕(—),女,河南许昌人,在读硕士研究生,主要从事机电控制及自动化方面的研究文章编号:1002-5634(2008)03-0048-02基于PL C 的3自由度机械手的控制系统刘晓燕1,乔文生2,陈俭培1,王丽君1(1.华北水利水电学院,河南郑州450011;2.北京京航公司,北京100076)摘 要:利用“慧鱼”组合模型构建了3自由度机械手的机械模型,并对其运动原理和各模块间的相互作用进行了分析与研究,在此基础上利用PLC 实现了机械手的控制过程,对设计中出现的电源不匹配问题,通过使用中间继电器和稳压直流电源对其进行控制.实践表明,整个控制系统运行可靠,为实际3自由度机械手的控制提供了技术参考.关键词:3自由度机械手;PLC;行程开关;中间继电器中图分类号:TP241.2 文献标识码:A 3自由度机械手又称3D 机械人,能够实现3个自由度方向(水平、垂直和旋转)的抓取或放置物品,具有操作范围大、灵活性好、应用广泛的特点[1].1 3自由度机械手的工作原理1.1 结构简介采用慧鱼组合模型对3自由度机械手进行了构建,模型结构如图1所示[2].1—底座;2—旋转台;3—小圆柱;4—抓手行程开关;5—抓手电机;6—手臂;7—垂直行程开关;8—垂直螺杆9—螺杆轴齿轮;10—惰轮;11—垂直电机齿轮;12—垂直电机;13—水平电机;14—水平行程开关;15—水平螺杆;16—水平螺母;17—垂直螺母;18—旋转行程开关图1 3自由度机械手组合模型1.2 工作原理3自由度机械手能够实现在不同的方向上抓取物体,其运动系统主要由4部分组成:水平、垂直、旋转和手爪运动系统.每一个运动系统的控制部分都是由1个直流电机、2个行程开关组成.以垂直运动系统为例介绍3自由度机械手的工作原理.垂直运动系统主要由3个主要部件组成:电机、限位行程开关和计数行程开关.电机为垂直运动提供动力:这里所选用的电机为直流电机,通9V 电压,正向旋转;通以-9V 电压,反向旋转.限位行程开关限制垂直运动的极限位置,也是垂直运动的起始位置:当机械手臂向上运动碰到上面的限位行程开关后,机械手臂停止运动.计数行程开关是用来计量电机的旋转圈数的,从而可以精确计算垂直运动的距离,起到定位的作用.垂直运动具体的运动过程可分为定位阶段和复位阶段.定位阶段:驱动电机使手臂从初始位置开始下降,通过定位行程开关计数使手臂到达指定位置停止.复位阶段:驱动电机反转使手臂上升,直到碰到限位行程开关结束.整个垂直运动以PLC 为核心,通过外接电路(一方面行程开关的信号经由外接电路输入到P LC 中,另一方面P LC 发送指令给电机,使电机产生相应的运动)进一步驱动执行机构动作.控制系统的结构如图2所示.:2008-01-20:1984.图2 控制系统的结构框图2 控制系统设计受实验室条件限制,采用了AFP12217-F 型[3]可编程控制器来实现3自由度机械手运动的控制过程.整个控制系统以可编程控制器为中心,通过继电器与稳压电源组成的外接电路与输入输出装置相连.主要的输入量为运动过程中的限位行程开关和计数行程开关,输出量为控制运动机构动作的电机.具体的控制过程如下:1.机械手开夹(抓手计数开关计数)ϖ旋转台正转到位置1ϖ垂直电机下降ϖ水平电机伸长(水平计数开关计数)到位置2ϖ闭夹夹取工件;2.垂直电机动作(上升)ϖ旋转台正转ϖ水平电机做收缩动作(水平计数开关计数)到位置3→垂直电机动作(下降)ϖ开夹(抓手计数开关计数)ϖ放工件;3.垂直电机动作(上升到顶部)ϖ旋转台反转到位置4ϖ水平电机做伸长动作(水平计数开关计数)→垂直电机动作(下降到底部)ϖ闭夹夹取工件; 4.垂直电机动作(上升顶部)ϖ旋转台反转ϖ水平电机做收缩动作(水平计数开关计数)ϖ垂直电机动作(下降)ϖ开夹放物件(抓手计数开关计数). 图3为实现整个控制作用的部分P LC 梯形图.3 设计中产生的问题及解决措施控制电机是9V 驱动,而P LC 输出电压是24V ,这样就出现了电源不匹配的问题,使用中间继电器和稳压直流电源即可解决.具体做法是:将2个中间继电器的接地端和9V 端联在一起,这样2个继电器原本的4个端子被化解为2个,然后将电机的2个输入端分别接在2个中间继电器上,再将2个中间继电器的输入端(24V 电源和接地端)分别接在P LC 控制面板上,这样就可以实现P LC 程序控制电机的正、反转.图3 PLC 梯形图参 考 文 献[1]柳洪义,宋伟刚.机器人技术基础[M ].北京:冶金工业出版社,1999:1-20.[2]德国慧鱼公司.操作手册L LW i n 3.0[Z].2004.[3]吴键强,姜三勇.可编程控制器应用技术[M ].哈尔滨:哈尔滨工业大学出版社,2000:23-46.3-DO F M a n ipu l a tor C on tr ol Syste m Ba sed on PLCL IU Xiao 2yan 1,Q IAO W en 2sheng 2,CHEN Jian 2pei 1,WANG L i 2jun 1(1.North China Institute of Wa ter Conservancy and Hydroelectri c Po wer,Zheng zhou 450011,Chi na;2.Be iji ng J inghang Co r porati on,B eijing 100076,Ch i na )Ab stra ct:F ische rt echnik ha s been adop t ed to e stablis h t he 3-DOF mani pula t or m echani ca l struc t ure,and the princ i p l e s of the move 2ment and t heir int e rac ti ons be t w een t he module s are analyzed and researched .On this basis,the PLC is used t o i m p le m ent t he control proce ss of the m ani pulat or .For the problem tha t po we r doe s n o tm atch wit h the equi pment t hat happens during t he design,by using the y D y,T ,y 2,f f 3DOF K y 3DOF ;L ;;y94第29卷第3期刘晓燕等: 基于PLC 的3自由度机械手的控制系统 in t e r med ia t e re la s an d regu l a t o r C po w er supp l it is co n tro ll ed .he p ractice sh ow s tha t t h e w ho l e co n tro l s stem op erati o n is re lia b le an d it p rov id s th e techn ical su p po rt o r the con tr o l o t h e actua l -man i p u la t o r .e w or d s:-man i p u la t o r P C trip s w itch in ter m ed i a te rela。
慧鱼实验
21世纪将是个全面创新的时代,如何培养、提升现代学生的创造力、想象力与科学技能,来迎接这个竞争的时代?微型组合机器人能实现多种控制方式及多种模型设计,适合于机电一体化、工业自动控制、机械创新等课程,推荐采用PLC控制技术。
微型组合机器人配有教材,图文并茂、浅显易懂,对每一个模型都作深入浅出的原理说明、功能解释,鼓励学生举一反三、活学活用,让他们不断发展创新。
微型组合机器人是通过各种各样的构件(功能模块)组合拼装而成,因此,“构件”是模型的最小组成部分。
实验一计算机组合包创意实验设计一实验目的:1、熟悉慧鱼模型的各个模块。
2、了解三自由度机器人的基本结构。
3、能够运用计算机编程,合理控制机器人的运动。
4、能进行简单创意实验设计。
二实验器材:慧鱼计算机组合包一套慧鱼专用电源一套PC机一台LLWIN 软件一套接口电路板一块三实验原理:如图所示(见附图): 为一三自由度机器人,能够实现搬运工件的作用,三自* 由度机器人包括腰部、大臂以及夹钳。
腰部能够实现左右旋转运动,大臂能够实* 现上下的俯仰运动,夹钳则能够实现夹取物体。
该三自由度机械人总共涉及到6个行程开关以及3个电动机,其中M1驱动腰部* 旋转,M2驱动大臂俯仰,M3驱动夹钳的关闭。
E1用于限定夹钳的开闭位置,E2用* 于腰部旋转进行计数,E3限定了大仰起后的极限位置,E4用于夹钳的驱动轴旋转* 的次数进行计数,E5对大臂处的蜗杆旋转次数进行统计,E6限制腰部旋转的极限* 位置。
四实验内容1、按照装置图组装出机器人。
2、按照连线图将机器人各部与计算机数据线连好。
3、用计算机中的软件(LLWIN)对机器人进行控制操作。
(1) 对各个部分进行检测:M1M2M3E1E2E3E4E5E6全部测试通过后再进行以下实验内容。
(2) 调试出控制程度,进行连续操作。
4、对软件进行改编,使机器人实现更多的功能。
(1) 实现夹取与放置的换位。
(2) 改变大臂运动轨迹。
基于PLC的三自由度机械手控制系统设计与实现
的抓取或放置物品,具有操作范围大,灵活性好,应用广 泛的特点Cz]。
可编程控制器(PLC)是一种专门为工业应用而设 计的进行数字运算操作的电子控制装置。由于其具有 可靠性高,功能强,编程简单,人机交互界面友好等特性 而广泛用于工业控制系统。
步进电机是将电脉冲信号转变为角位移或线位移 的开环执行元件。在非超载情况下,电机的转速、停止 位置只取决于脉冲信号的频率和脉冲数目[3]。这一线 性关系的存在,加上步进电机只有周期性误差而无累计 误差的特点,使其在速度、定位等控制领域应用得非常 广泛。
大学,2006. [9]孙岩洲,邱毓昌,丁卫东.电源频率对介质阻挡放电的影响
口].高电压技术,2002,28(11):43—53. [10]王振绪.提高大型高频臭氧发生器电能利用率的研究[D1
南京:河海大学,2006.
作者简介陈 飞 男.1983年出生,福建福州人,在读硕士。主要从事臭氧发生管的研究。 朱天字 男,1961年出生,江苏靖江人。硕士,教授。主要从事大型高频臭氧发生嚣的研究。 157
垒皇至蕉苤瘗昱g
参考文献
(I)主界面
9’手动上作方式界面
(c)自动工作方式界面
1-13王小玲.工业机械手的PLC控制[J].机电工程机术,2004,
33(9):32—36.
[2]李勇成.基于PLC的步进电机控制在工业机械手中的应用 [J].科技信息,2008(18):30—31.
[3]韩志强,刘晓婷.步进电机PLC控制的研究设计[J].轻工机 械,2006,24(4):114—115.
萎 X4 x5
X6
Y2
几
U
上^F
4.. Y3
几
基于“慧鱼”模型的工业机械手设计
②手腕
起 到连接 手部 和手臂 的作 用 ,主要起 支撑作 用 ,机器 程序 运动 ,并 同时机械 手接受 的指令 信息 被存储 起来 ,同 人 一般要有 6 个 自由度才 能使末端操作 器到达 目 标位 置和处 时按 其控 制系统 的按 照接收 的信息对 各末 端操作 器发 出指
于 期 望 的状 态 。
成。
分 ,手臂 的回转运 动和升 降 ( 或俯 仰 )运动均 与立柱 有密
切的联系。
⑤机座
①夹持部分 这是 机械 手 的独 立 的执行部 件 ,夹持部 分采 用蜗轮 蜗
杆 机构控制手抓的加紧 、释放 。
机 械 手 的各 执 行 机 构 部 件 和驱 动 系统 都 安 装 在 机 座
中发生相对运动。
经过 历 史 的 考 验 ,机 器 人 对 我们 的生 产 和 生 活越 来 越重 要 。单 位 时间 内的次 品率也越 来越低 ,同时我们 工作 更加 轻松 ,只需 控制好 操作 面板 ,也就 是机器 人 的控 制 系 统 。与此 同时 ,生产 出来 的产 品品质更 加完 美 ,这 样可 以
关键 词 :工 业 机 械 手 ; 慧鱼 模 型 ;ROB O P r o
中 图分类 号 :T P 2 4 2 文 献标 识码 :A
1 . 设 计 题 目的 提 出及 主 要 任 务
荷 大小都 发生 变化 ,运 动速 度和定 位精度也 不行 ;运动 平 稳 性要好 ,精度 要高 ,它是 机械手 的重要 指标 ;重量 和转 动 惯量要 小 ,为了提 高运动 运动速 度 ,尽量 减小 臂部 的重 量 ,同时还要 注意偏 重力矩 ,也就 是让臂 部 的重 心与立 柱 的重 心尽量靠 近 ;导向性要 好 ,一面手 臂在直 线运动 过程
三自由度机械手毕业设计
图2.3.1机械手基座的旋转运动
电机输出动能,经减速箱调节速度并传递到蜗杆,蜗杆与齿轮啮合传动,齿轮转动带动整个底座进行旋转运动。
2、自由度二:机械手的水平运动,如图2.3所示
图2.3.1机械手的前后运动
电机输出动能,经减速箱调节速度并传递到丝杆,再通过链条和螺旋机构转化为工作台的前后运动。
3、自由度三:机械手的垂直运动
图2.3.2机械手的上下运动
电机输出动能,经减速箱调节速度并传递到丝杆,再通过链条和螺旋机构转化为水平前后运动,最后经连杆机构转化为机械手的上下运动
4、机械手爪的夹紧与放松运动
图2.3.3通过上面的电机控制开夹
图2.3.4机械手夹紧与放松运动
电机输出动能,经减速箱调节速度并传递到传动轴,不同轴线的各传动杆通过万向铰链进行连接并传递动力,最近将杆件的旋转运动通过螺旋机构转化为手爪的夹紧或松开运动。
三自由度机械手
一、概述
1.1机电一体化技术
1.1.1机电一体化技术的定义和内容
机电一体化技术综合应用了机械技术、计算机与信息技术、系统技术、自动控制技术、传感检测技术、伺服传动技术,接口技术及系统总体技术等群体技术,从系统的观点出发,根据系统功能目标和优化组织结构目标,以智能、动力、结构、运动和感知等组成要素为基础,对各组成要素及相互之间的信息处理、接口耦合、运动传递、物质运动、能量变换机理进行研究,使得整个系统有机结合与综合集成,并在系统程序和微电子电路的有序信息流控制下,形成物质和能量的有规则运动,在高质量、高精度、高可靠性、低能耗意义上实现多种技术功能复合的最佳功能价值的系统工程技术。
慧鱼创意组合模型的主要部件采用优质尼龙塑胶制造,尺寸精确,不易磨损,可以保证反复拆装的同时不影响模型结合的精确度;构件的工业燕尾槽专利设计使六面都可拼接,独特的设计可实现随心所欲的组合和扩充。它由各种型号和规格的零件构成,类似于积木。零件的种类很多,几乎包括了机械课程和日常生活中的所有零件,如机械零件: 连杆、凸轮、齿轮(普通齿轮、锥齿轮、斜齿轮、内啮合齿轮、外啮合齿轮等)、蜗轮、蜗 杆、螺杆、铰链、带、链条、轴(直轴和曲轴)、联轴器、弹簧、减速器、齿轮箱、车轮等;电气零件:直流电机、灯泡、电磁气阀、行程开关、传感器(光敏、热敏、磁敏、触敏)、可调直流变压器、电脑接口板、PLC 接口板、红外线发射接收装置等;气动零件:储气罐、汽缸、活塞、气弯头、手动气阀、电磁气阀、气管等。由这些零件的不同组合便可构造出各式各样的模型,这些模型主要可分为两大类:技术组和机器人组。技术组又包括传感器技术组、气动技术组、汽车技术组、太阳能技术组、万能组合包。机器人组又包括3D 机器人、计算机器人、实验机器人、工业机器人、移动机器 人和气动机器人。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
“慧鱼模型”三自由度机械手设计小册学院:机电工程学院班级:机械设计与制造指导老师:姓名:学号:************一、概述 (1)1.1机电一体化技术 (1)1.1.1机电一体化技术的定义和内容 (1)1.1.2机电一体化系统组成 (1)1.2. 慧鱼机器人 (2)1.2.1慧鱼创意教学组合模型简介 (2)二、机器人的组成 (3)2.1组成构件 (3)2.2慧鱼机器人分析 (6)2.2.1机器人机构组成 (6)2.2.2主要成分构成及功能 (7)2.3. 机器人的工作空间形式 (9)2.4机器人的机械运动形态和变换控制 (11)2.5机器人的位移、速度、方向的控制方法 (13)一、概述1.1机电一体化技术1.1.1机电一体化技术的定义和内容机电一体化技术综合应用了机械技术、计算机与信息技术、系统技术、自动控制技术、传感检测技术、伺服传动技术,接口技术及系统总体技术等群体技术,从系统的观点出发,根据系统功能目标和优化组织结构目标,以智能、动力、结构、运动和感知等组成要素为基础,对各组成要素及相互之间的信息处理、接口耦合、运动传递、物质运动、能量变换机理进行研究,使得整个系统有机结合与综合集成,并在系统程序和微电子电路的有序信息流控制下,形成物质和能量的有规则运动,在高质量、高精度、高可靠性、低能耗意义上实现多种技术功能复合的最佳功能价值的系统工程技术。
1.1.2机电一体化系统组成1.机械本体机械本体包括机架、机械连接、机械传动等,它是机电一体化的基础,起着支撑系统中其他功能单元、传递运动和动力的作用。
2.检测传感部分检测传感部分包括各种传感器及其信号检测电路,其作用就是检测机电一体化系统工作过程中本身和外界环境有关参量的变化,并将信息传递给电子控制单元,电子控制单元根据检查到的信息向执行器发出相应的控制。
3.电子控制单元电子控制单元是机电一体化系统的核心,负责将来自各传感器的检测信号和外部输入命令进行集中、存储、计算、分析,根据信息处理结果,按照一定的程度和节奏发出相应的指令,控制整个系统有目的地进行。
4.执行器执行器的作用是根据电子控制单元的指令驱动机械部件的运动。
执行器是运动部件,通常采用电力驱动、气压驱动和液压驱动等几种方式。
5.动力源动力源是机电一体化产品能量供应部分,是按照系统控制要求向机械系统提供能量和动力使系统正常运行。
提供能量的方式包括电能、气能和液压能。
1.2. 慧鱼机器人1.2.1慧鱼创意教学组合模型简介1964年,慧鱼创意教学组合模型(fischertechnik)诞生于德国,是由德国发明家Arthur Fischer 博士在 1964 年从其专利“六面拼接体”的基础上发明的。
它是技术含量很高的工程技术类智趣拼装模型,是展示科学原理和技术过程的理想教具,也是体现世界最先进教育理念的学具,为创新教育和创新实验提供了最佳的载体。
慧鱼创意组合模型的主要部件采用优质尼龙塑胶制造,尺寸精确,不易磨损,可以保证反复拆装的同时不影响模型结合的精确度;构件的工业燕尾槽专利设计使六面都可拼接,独特的设计可实现随心所欲的组合和扩充。
它由各种型号和规格的零件构成,类似于积木。
零件的种类很多,几乎包括了机械课程和日常生活中的所有零件,如机械零件:连杆、凸轮、齿轮(普通齿轮、锥齿轮、斜齿轮、内啮合齿轮、外啮合齿轮等)、蜗轮、蜗杆、螺杆、铰链、带、链条、轴(直轴和曲轴)、联轴器、弹簧、减速器、齿轮箱、车轮等;电气零件:直流电机、灯泡、电磁气阀、行程开关、传感器(光敏、热敏、磁敏、触敏)、可调直流变压器、电脑接口板、PLC 接口板、红外线发射接收装置等;气动零件:储气罐、汽缸、活塞、气弯头、手动气阀、电磁气阀、气管等。
由这些零件的不同组合便可构造出各式各样的模型,这些模型主要可分为两大类:技术组和机器人组。
技术组又包括传感器技术组、气动技术组、汽车技术组、太阳能技术组、万能组合包。
机器人组又包括3D 机器人、计算机器人、实验机器人、工业机器人、移动机器人和气动机器人。
在慧鱼实验过程中,通过对各类模型的认识和组装,从而可以熟悉并掌握各类机械设备和自动化装置的常用结构和工作原理。
在模型的组建中,将运用到机械加工、气动技术、电子电路和软件编程等知识,从而加深了对这些相关课程的理解。
另外通过慧鱼模型的搭建和组装也培养了实际动手的能力、解决实际问题的能力和创新设计的能力二、机器人的组成2.1组成构件2.2慧鱼机器人分析此次机电一体化创新设计项目,我们所完成的是慧鱼工业机器人中的三自由度机械手,它能够通过智能控制接口盒的编程控制实现三个自由度方向(旋转、水平、垂直)的夹取或放置物品,因此操作范围大,灵活性好。
2.2.1机器人机构组成如图2.1所示,该机器人为三自由度机械手,其机械手爪有夹紧和松开物件的功能,由三个电机驱动三个自由度的运动,由一个电机控制手爪的夹紧和松开。
可实现整体的旋转、水平、垂直运动及手爪的夹紧、松开运动。
该机械人可通过PC 对控制芯片进行编程,从而输出控制信号到各电机,驱动机械人的运动方向或行程,从而夹取或放置物件。
图2.1 机械手机构组成2.2.2主要成分构成及功能1、机械手基座旋转运动图2.2.1机械手基座旋转运动UG模型图该运动主要构件有电动机、减速箱、蜗杆、齿轮。
2.机械手水平运动图2.2.2机械手水平运动UG模型图该运动主要构件有主要运动构件有电动机、减速箱、丝杆、螺旋传动块、导杆。
3、机械手垂直运动图2.2.3机械手垂直运动UG模型图该运动主要构件有主要运动构件有电动机、减速箱、丝杆、螺旋传动块、连杆机构4、机械手爪夹紧与松开运动图2.2.4机械手爪夹紧与松开运动UG模型图该运动主要构件有主要运动构件有电动机、减速箱、传动轴、万向铰链、螺旋传动块、连杆机构。
2.3. 机器人的工作空间形式该机器人的工作空间形式主要有三个自由度的运动和机械手爪的夹松运动。
1、自由度一:机械手基座的旋转运动,如图2.3.1所示图2.3.1 机械手基座的旋转运动电机输出动能,经减速箱调节速度并传递到蜗杆,蜗杆与齿轮啮合传动,齿轮转动带动整个底座进行旋转运动。
2、自由度二:机械手的水平运动,如图2.3所示图2.3.1机械手的前后运动电机输出动能,经减速箱调节速度并传递到丝杆,再通过链条和螺旋机构转化为工作台的前后运动。
3、自由度三:机械手的垂直运动图2.3.2机械手的上下运动电机输出动能,经减速箱调节速度并传递到丝杆,再通过链条和螺旋机构转化为水平前后运动,最后经连杆机构转化为机械手的上下运动4、机械手爪的夹紧与放松运动图2.3.3通过上面的电机控制开夹图2.3.4机械手夹紧与放松运动电机输出动能,经减速箱调节速度并传递到传动轴,不同轴线的各传动杆通过万向铰链进行连接并传递动力,最近将杆件的旋转运动通过螺旋机构转化为手爪的夹紧或松开运动。
2.4机器人的机械运动形态和变换控制1、机械手基座的旋转运动如下图所示,传动方式为:控制信号—电机—减速箱—圆柱蜗杆传动—基座电动机减速箱图2.4.1机械手基座的旋转运动机构简图2、机械手的水平运动如下图所示,传动方式为:控制信号—电机—减速箱—螺旋机构—机架图2.4.2机械手的前后运动机构简图3、机械手的垂直运动如下图所示,传动方式为:控制信号—电机—减速箱—螺旋机构—连杆机构—机架图2.4.3机械手的垂直运动机构简图电动机 减速箱电动机 减速箱4、机械手爪夹紧与放松运动如下图所示,传动方式为:控制信号—电机—减速箱—传动轴—万向铰链—传动轴—螺旋机构—连杆机构—手爪电动机夹紧气缸图2.4.4机械手爪夹紧与放松运动机构简图2.5机器人的位移、速度、方向的控制方法该机器人整体与控制芯片盒连接,并通过PC的程序编制与载入,将控制信号输送到电机。
其中速度控制信号将控制电机的速度从而实现机器人的运动速度转变,并且时间控制信号将于速度控制信号配合实现机器人的运动位移量可调。
为了防止超出行程,各主要机械运动构件附近安装有限位行程开关,以限制运动的极限位置,同时也是运动的起始位置;当各运动构件运动碰到两边的限位行程开关后,机器人将停止运动。
1、机械手基座的旋转运动位移速度控制动力源(电机)接收到控制芯片的位移速度控制信号后动作,由于电机转速较高,通过减速箱的作用,调节电机转速到较低的合适量。
动力输出轴通过蜗轮机构将动力转换为基座齿轮的转动。
躯干的理论旋转范围为0°~360°。
2.机械手的水平运动位移速度控制动力源(电机)接收到控制芯片的速度位移控制信号后动作,由于电机转速较高,通过减速箱的作用,调节电机转速到较低的合适量。
然后动力轴的转动通过螺旋机构转化为机架的水平前后运动。
3、机械手的垂直运动位移速度控制动力源(电机)接收到智能控制接口盒的速度位移控制信号后动作,由于电机转速较高,通过减速箱的作用,调节电机转速到较低的合适量。
减速箱输出动力到丝杆,再通过螺旋机构转化为机架的前后水平运动,最后通过连杆机构转化为机械臂的上下摆动。
4、机械手爪夹紧与放松运动位移速度控制动力源(电机)接收到控制芯片的速度位移控制信号后动作,由于电机转速较高,通过减速箱的作用,调节电机转速到较低的合适量。
减速箱输出动力到传动轴,各传动轴因轴线不在同一水平线上故需通过万向铰链连接,最后传递到螺旋机构,带动连杆机构从而形成机械手爪的夹紧与松开运动。