常见机械机构动画大全
机构原理动画直观非常经典
搅拌机
该机构是一曲柄摇杆机构的应用实例,利用连杆上E点的轨迹来进行搅拌。
5
夹具机构
当工件被夹紧后,BCD成一直线,机构处于死点位置,即使工 件的反力很大,夹具也不会自动松脱,该例为利用死点位置的 自锁特性来实现工作要求的。
6
K=1的曲柄摇杆机构
从动件摇杆处于两极限位置时,对应主动件曲柄位置AB1、 AB2共线,即极位夹角θ=0,K=1,机构没有急回特性。
1
双曲柄机构
当曲柄AB为原动件作匀速回转时,曲柄CD跟随作周期性的匀速圆周回转, 当曲柄从位置AB1转过φ1角到位置AB2时,从动件CD转过180°,当曲柄从 位置AB2转过φ2角到位置AB1时,从动件CD转过180°,因为φ1>φ2 ,即 t1>t2,从动曲柄的角速度不是常数,而是作变角速度回转。
36
链传动
链传动靠链轮和链之间的啮合传递运动,而链轮之间有挠性 链条,兼有啮合传动和挠性传动的特点。因此,可在不宜采 用带传动和齿轮传动的场合考虑采用链传动。
37
开口式带传动
传递平行轴之间的运动,两带轮转向相同。 带传动适于中心距较大的传动;传动平稳,可缓冲吸振; 过载时打滑,能起安全保护作用。带传动的主要缺点是不能 保证准确的传动比,带的寿命和传动效率较低。适合于小功 率的动力传动,在机械传动系统中,多用于高速级。
46
外接圆柱摩擦轮
主从动件转向相反,传动比:i=n1/n2=r2/r1,图中n1、r1及 r2可输入,从而得出 不同尺寸的摩擦轮传动。
47
内接圆柱摩擦轮
主从动件转向相同,传动比:i=n1/n2=r2/r1,图中n1、r1及 r2可输入, 从而得出不同尺寸的摩擦轮传动。
48
齿轮传动
高级机械原理全动画图解

运动轨迹与运动规律
机构的运动轨迹是指机构中某一点或 某一构件在运动时所形成的轨迹。机 构的运动规律则是指机构中某一点或 某一构件在运动时所遵循的规律,如 简谐运动、匀速运动等。了解机构的 运动轨迹和运动规律对于确定机构的 运动性能和进行机构设计具有重要意 义。
03 连杆机构全动画图解
连杆机构类型及特点
运动副
连接两个构件并使它们之间产 生相对运动的装置,如铰链、
滑轨等。
机械原理发展历程及趋势
发展历程
机械原理经历了从手工制造到机械制造、从简单机械到复杂机械、从静态分析 到动态分析的发展历程。
发展趋势
随着计算机技术的飞速发展,机械原理正朝着数字化、智能化、集成化的方向 发展,未来将更加注重机械系统的动态性能、控制精度和节能环保等方面的研 究。
07 轮系全动画图解
轮系类型及特点
定轴轮系
所有齿轮的轴线都固定不动,适 用于传递固定传动比的运动和动
力。
周转轮系
至少有一个齿轮的轴线是绕其他齿 轮的轴线转动的,可实现复杂的运 动和动力传递。
混合轮系
定轴轮系和周转轮系的组合,兼具 两者的特点,可实现更为复杂的运 动和动力传递。
定轴轮系传动比计算方法
传动比定义
输入轴转速与输出轴转速之比, 或输出轴扭矩与输入轴扭矩之比。
传动比计算
传动比等于相邻两齿轮齿数的反 比,即i=n1/n2=z2/z1,其中n
为转速,z为齿数。
注意事项
计算传动比时需考虑齿轮的旋向, 以及是否存在变位齿轮等因素。
周转轮系传动比计算方法
传动比定义
与定轴轮系相同,为输入轴转速 与输出轴转速之比,或输出轴扭 矩与输入轴扭矩之比。
THANKS FOR WATCHING
机械机构运动(原理)动画
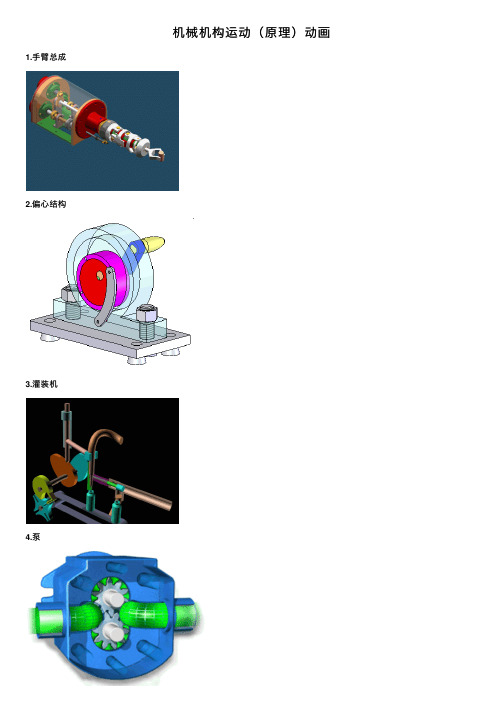
机械机构运动(原理)动画1.⼿臂总成
2.偏⼼结构
3.灌装机
4.泵
5.涡轮变速箱
6、⽔平对置两缸发动机
7、阻尼原理
8、冲击夹持机构
9、滚珠丝杠传动机构
10、齿轮传动机构
11、⾷品制作
12、3D打印
13、神奇的家具
14、炒⽠⼦机构
15、马⽿他⼗字机芯
⽤于控制时钟的秒针运动
16棘轮机构
往复摆动的蓝⾊滑块使得棘轮旋转⽅向相同,橙⾊棘⽖和黄⾊棘⽖推动棘轮,红⾊弹簧维持棘⽖和棘轮的接触
17、插床机构
18、铰链机构
19、印刷机构
20、可以翻跟头的⾃⾏车
21、飞机的星形发动机
22、⼿枪的机械原理
23、飞机螺旋桨同步射击器
24、缝纫机
25、汽车变档结构
26、转⼦发动机
(内燃机的⼀种,把热能转为旋转运动⽽⾮活塞运动)
27、椭圆规
28、等速万向节
(汽车等速万向节,这就是为啥前轮驱动的汽车的轮⼦还能转)29、弹药装填系统
30、直列式发动机
31、⽔平对置式发动机
32、⽕车的推进原理
(⽕车的推进原理)
33、喷⽓式发动机
34、双涵道涡轮发动机
35、四冲程发动机⼯作原理
36、离合器
37、破碎机
38、泥浆泵
39、斯特林发动机
40、太阳能加热装置
动画实在太多了,还是简化⼀下吧,⼀组⼀组的上吧!
41、平⾯连杆机构
42、凸轮机构
43、间歇运动机构
44、螺旋传动带传动链传动
45、齿轮传动蜗杆传动
46、齿轮系
41、还是⽐较期待有⼀台这样的电脑!不久的将来应该可以实现。
机械结构动画图(1)
平行双曲柄机构
当机构处于AB1C1D和AB2C2D时,机构的传动角γ=0,即为死点位置, 若在此位置由于偶然外力的影响,则可能使曲柄转向不定,出现误动作。 当原动件曲柄作匀速回转,从动曲柄也以相同角速度匀速同向回转,连 杆作平移运动。
机械结构动画图(1)
平行机构
该机构为机车驱动轮联动机构,是利用平行曲柄来消除机构死点位 置的运动不确定状态的。
从动件摇杆处于两极限位置时,对应主动件曲柄位置AB1、 AB2共线,即极位夹角θ=0,K=1,机构没有急回特性。
机械结构动画图(1)
翻台机构
本机构为翻台震实式造型机的翻台机构, 是双摇杆机构,当造型完毕后,可将翻台 F翻转180°,转到起模工作台的上面,以 备起摸。
机械结构动画图(1)
对心曲柄滑块机构
机械结构动画图(1)
摆动导杆机构
该机构具有急回运动性质,且其传动角始 终为90度,具有最好的传力性能,常用于 牛头刨床、插床和送料装置中。
机械结构动画图(1)
定块机构
该机构是通过将曲柄滑块机构中的滑 块固定而演化得出,它可把主动件的 回转或摆动转化为导杆相对于滑块的 往复移动。
机械结构动画图(1)
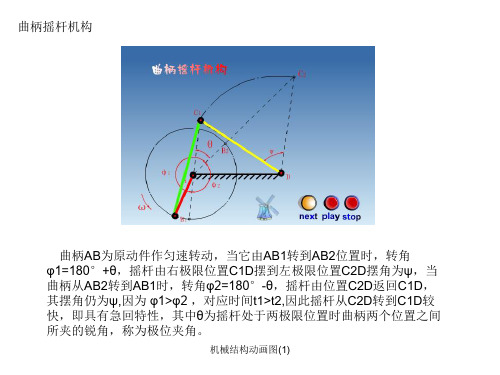
曲柄摇杆机构
曲柄AB为原动件作匀速转动,当它由AB1转到AB2位置时,转角 φ1=180°+θ,摇杆由右极限位置C1D摆到左极限位置C2D摆角为ψ,当 曲柄从AB2转到AB1时,转角φ2=180°-θ,摇杆由位置C2D返回C1D, 其摆角仍为ψ,因为 φ1>φ2 ,对应时间t1>t2,因此摇杆从C2D转到C1D较 快,即具有急回特性,其中θ为摇杆处于两极限位置时曲柄两个位置之间 所夹的锐角,称为极位夹角。
螺母固定不动,螺杆转动并移动.这种结构以固定螺母为主 要支承,结构简单,但占据空间大.常用于螺旋压力机、螺旋 起重器、千分尺等.
机械原理动画演示 四杆机构 凸轮机构 齿轮机构 链传动 带传动 液压传动

滚子对心移动从动件盘形凸轮机构
机构中凸轮匀速旋转,带动从动件往复移动,滚子接触,摩擦阻力小, 不易摩擦,承载能力较大,但运动规律有局限性,滚子轴处有间隙, 不宜高速。
平底移动从动件盘形凸轮机构
机构中凸轮匀速旋转,带动从动件往复移动,压力角始终为零度,传力特性好, 结构紧凑,润滑性能好,摩擦阻力较小,适用于高速, 但凸轮轮廓不允许呈下 凹,因此实现准确的运动规律受到限制。
转动导杆机构
该机构是通过将曲柄滑块机构中的曲柄固定演 化而成,它可将主动件的匀速回转转化为导杆 的非匀速摆动,且具有急回特性。
插齿机
该机构由两个四杆机构组成,粉红色的杆、红色杆、绿色杆、机架组成曲柄摇杆机 构,绿色杆、橙色杆、黄色杆、机架组成摇杆滑块机构,当粉红色的曲柄匀速回转 时,绿色杆作变速摆动,通过橙色的连杆使黄色的滑块向下切削时作近似匀速运动, 往上则因曲柄摇杆机构的急回运动性质使插齿刀快速退回。
牛头刨主机构
这是一个六杆机构,曲柄整周匀速转动,带 动刨刀往复移动,该机构利用摆动导杆机构的 急回特性使刨刀快速退回,以提高工作效率。
摇块机构
该机构是通过将曲柄滑块机构中的连杆固定而演化得出, 它可把主动件的匀速回转运动转化为导杆相对于滑块的往复 移动并随滑块摆动的形式。
插床导杆机构
利用摆动导杆机构的急回特性使插刀快速退回,以提高工作效率。
平行双曲柄机构
当机构处于AB1C1D和AB2C2D时,机构的传动角γ=0,即为死点位置, 若在此位置由于偶然外力的影响,则可能使曲柄转向不定,出现误动作。 当原动件曲柄作匀速回转,从动曲柄也以相同角速度匀速同向回转,连 杆作平移运动。
曲柄摇杆机构
曲柄AB为原动件作匀速转动,当它由AB1转到AB2位置时,转角 φ1=180°+θ,摇杆由右极限位置C1D摆到左极限位置C2D摆角为ψ,当 曲柄从AB2转到AB1时,转角φ2=180°-θ,摇杆由位置C2D返回C1D, 其摆角仍为ψ,因为 φ1>φ2 ,对应时间t1>t2,因此摇杆从C2D转到C1D较 快,即具有急回特性,其中θ为摇杆处于两极限位置时曲柄两个位置之间 所夹的锐角,称为极位夹角。
机械结构和传动相关动态图原理,趣味十足!

机械结构和传动相关动态图原理,趣味十足!翻转翼型的风力涡轮机1由于黄色的筒形凸轮、粉红色翼型只在涡轮机柱的一侧显示了它们朝向风流(蓝色箭头)的面。
因此,风总是在涡轮机的蓝色轴上施加扭矩。
下面这个动图展示的是细节。
黄色尾舵有助于将凸轮块(在棕色柱上枢转)向风流方向旋转。
其实这种结构也可以只使用一个凸轮,并通过绿色条(构建平行四边形机构)连接每一列的翼型,如下面动图所示。
翻转翼型的风力涡轮机2黄色翼型显示他们朝向气流(红色箭头)的面,由于绿色盘形凸轮,仅在涡轮机柱的一侧,所以风总是在涡轮机的蓝色轴上施加扭矩。
俯视看一下它的运动细节↓↓绿色尾舵有助于将凸轮块(在棕色柱上枢转)向风流方向旋转。
半圆形翼型风力涡轮机当黄色翼型位于蓝色水平杆下方时,另一黄色翼则朝向风流(蓝色箭头)。
翼型面垂直布置,以确保风吹动翼面为涡轮机产生持续的扭矩。
蓝尾舵有助于旋转蓝色杆(在棕色柱上转动)朝向风流。
紫色垂直齿轮轴将扭矩传递给发电机(未示出)。
不同位置视图展示↓↓旋转和平移动作构件1输入部分是黄色桶形凸轮和绿色圆盘凸轮。
输出部分是粉红色轴,它向前移动→向右转→向后移动→向左转。
桶形凸轮控制直线运动。
绿色盘形凸轮控制90度转到,角运动。
不同的角度下面这个动图更好理解↓↓旋转和平移动作构件2蓝色输入曲柄使粉色销(固定到橙色管上的部件)沿着基座的矩形跑道移动。
因此,管运动如下:向前移动 - 向右转 - 向后移动 - 向左转。
内部透视图↓↓齿轮齿条驱动绿色支架和蓝色圆柱体固定在底座上。
灰色滚子承受齿轮的径向力。
这种设计避免了长滑道,易于组装并减小了摩擦力。
开门机构这是一种简单的开门机构,这种机构在断电的情况下,用曲柄(未示出)转动灰色蜗杆即可。
下面是细节展示Delta 机器人1黄色部分由三个步进电机通过空间连杆控制。
绿色和粉色条构建了3个平行四边形机构。
机械知网:分享知识,传播价值。
在一些设计中,它们之间的旋转接头被球形接头取代。
机械设计动画汇总(PPT80页)
连杆机构(连杆曲线)
• 一般连杆机构连杆上 的点的轨迹(简称连 杆曲线)是比较复杂 的,有的连杆曲线像 逗号,有的像“8” 字,有的像香蕉。 图示机构利用连杆曲 线实现了机构输出运 动的间歇运动。
连杆机构的应用(炉门)
• 机构为铰链四杆机构。 用连杆作为炉门,设 计时,要求炉门实现 平面一般运动。
连杆机构(摆动导杆)
• 摆动导杆中注意导杆 为往复摆动
运动简图(鄂式破碎机)
• 鄂式破碎机中包括了 许多零部件,其中有 许多与机构的运动无 关,并且各个构件的 结构形状也与机构的 运动无关。这些与运 动无关的部分在机构 的运动简图中都可以 不反映出来。
运动副(移动、转动)
• 图示为移动副和转动 副,均属于平面运动 副,每一个运动副都 提供了两个运动约束, 它们也因所允许的运 动而得名。 移动副和转动副是工 程中最常见的运动副。
棘轮机构
• 摇杆往复摆动,使棘 爪推动棘轮逆时针方 向间歇运动,并靠止 动爪防止棘轮反转, 弹簧用来保证止动爪 能够正常工作。
不完全齿轮机构
• 当主动轮的齿与从动 轮的齿啮合时将推动 从动轮转动,而当主 动轮齿与从动轮齿脱 离啮合时,从动轮将 停止转动。两轮轮缘 备有锁止弧,可以防 止从动轮的游动,起 到定位作用。
连杆机构设计(急回)
• 设计的目的是确定机构中 各个构件的杆长 。 画出摇杆两个极限位置的 机构图,可以发现在铰链 点C的极限位置C1和C2已 知的情况下,问题的关键 在于确定固定铰链点A的 位置。 进一步分析可知,点A,、 C1和C2确定了一个圆, 对应弧C1C2的圆周角是 极位夹角。利用点C1和 C2、极位夹角就可以画出 这个圆。铰链点A应当在 此圆上。
• 在电动机中,由于转子与 电机的固定部分(定子) 之间形成了转动副,则缠 绕在转子上的导线受到的 电磁力对于转动副的转动 中心线形成电磁转矩,使 得转子转动,电动机的输 出运动为转动,这类电动 机称为旋转电动机,简称 旋转电机。
精巧的机械动图,分分钟了解零部件结构!
精巧的机械动图,分分钟了解零部件结构!
▲滚珠丝杠传动,是由丝杠及螺母二个配套组成的。
是目前传动机械中精度最高也是最常用的传动装置。
滚珠丝杆副是在丝杠与螺母间以钢球为滚动体的螺旋传动元件。
它可将旋转运动转变为直线运动,或者将直线运动转变为旋转运动。
因此滚珠丝杠副既是传动原件,也是直线运动与旋转运动相互转化元件。
▲偏心轮机构,是由曲柄作成偏心轮形状的平面四杆机构。
偏心轮机构的使用场合多用来带动机械的开关、活门偏心轮就是指装在轴上的轮形零件,轴孔偏向一边.轴旋转时,轮的外缘推动另一机件,产生往复运动。
▲三脚架(易拉宝)工作过程演示;
▲挖掘机的工作过程;
▲单片摩擦离合器
▲多片摩擦离合器
▲电磁摩擦离合器
好文欣赏
●一大波动态机械原理图来袭,值得收藏!
●德国先进机械技术,精彩动图演示工作原理!●科学如此奥妙!20张动态图揭秘机械的神奇原理
— End —。
汽车机械基础-常见机构(含动画)
第一节 机构常识
双副构件
注:点划线表示与其 联接的其他构件
第一节 机构常识
双副构件
第一节 机构常识
三副构件 (一个构件和 三个外副)
第一节 机构常识
三副构件 (一个构件和 三个外副)第一节 机构常识来自第一节 机构常识2
1
移动副
第一节 机构常识
2 1
转动副
第一节 机构常识
凸轮机构
滚子推杆
汽车机械基础
第二单元 常见机构
机器的组成
机器一般由4个部分组成:动力部分、执行部分、传动部 分及控制部分组成。 机器由机构组成,机器和机构统称为机械。
零件
加工制造的最小单元
机器的组成
1.构件 ——机器中每一个独立的运动单元。
组成—— 可由一个零件构成,也可由若干零件刚性联接而成。 构件
内 燃 机 连 杆
第一节 机构常识
机构
有一个构件作为机架,并可传递运动和力, 同时各构件间能够相对运动的连接方式组成的构 件称为机构。 机器由机构组成,机器和机构统称为机械。
机构分类
(1) 平面机构:各构件在同一平面或相互平 行的平面内运动的机构。
(2) 空间机构:不满足平面机构运动条件的 机构。
第一节 机构常识
1)低副:面接触的运动副。如 :
移动副
转动副
2)高副:点或线接触的运动副。
齿轮副
凸轮副
构件的相对运动形式
1)平面运动副: 组成运动副两 构件间作相对 平面运动
转动副 2)空间运动副: 组成运动副两 构件间作相对 空间运动。 螺旋副
齿轮副
球面副
第一节 机构常识
平面机构的运动副(低副、高副)
低副:两构件间呈面接触的运动副,可分为转动副和移动副。 转动副:组成运动副的两构件只能在一个平面内相对转动。 移动副:组成运动副的两构件只能沿某一轴线相对移动。
机械结构动画图
曲柄AB为原动件作匀速转动,当它由AB1转到AB2位置时,转角 φ1=180°+θ,摇杆由右极限位置C1D摆到左极限位置C2D摆角为ψ,当 曲柄从AB2转到AB1时,转角φ2=180°-θ,摇杆由位置C2D返回C1D, 其摆角仍为ψ,因为 φ1>φ2 ,对应时间t1>t2,因此摇杆从C2D转到C1D较 快,即具有急回特性,其中θ为摇杆处于两极限位置时曲柄两个位置之间 所夹的锐角,称为极位夹角。
齿轮齿条机构
该机构可以把齿轮的旋转运动转化为齿条的往复移动,或者把齿条的往复移动 转化为齿轮的旋转运动。
定轴轮系1
该机构中所有齿轮均具有固定几何轴线位置,可以实现大的传动比、变速、变向 及回转的合成或分解。
定轴轮系2 该机构中所有齿轮均具有固定几何轴线位置,可以实现大的传动比、变速及变向
•
树立质量法制观念、提高全员质量意 识。20.10.2420.10.24Saturday, October 24, 2020
•
安全在于心细,事故出在麻痹。20.10.2420.10.2409:24:2009:24:20October 24, 2020
•
踏实肯干,努力奋斗。2020年10月24日上午9时24分 20.10.2420.10.24
•
追求至善凭技术开拓市场,凭管理增 创效益 ,凭服 务树立 形象。2020年10月24日星期 六上午9时24分 20秒09:24:2020.10.24
谢谢大家!
•
严格把控质量关,让生产更加有保障 。2020年10月 上午9时 24分20.10.2409:24Oc tober 24, 2020
•
作业标准记得牢,驾轻就熟除烦恼。2020年10月24日星期 六9时24分20秒 09:24:2024 October 2020