双电机消除间隙
双电机消隙转台伺服系统的设计10

双电机消隙转台伺服系统的设计摘要:由于机械传动系统中齿轮轮齿的间隙会形成非线性误差,它影响着系统的动态性能和稳态精度。
本文针对齿轮传动中存在的齿隙非线性,以双电机驱动实现消除齿隙。
本文着重描述了该系统的控制原理和软硬件设计,根据所需消隙转矩和负载转矩、运动速度和加速度的关系,设计了实时消隙转矩补偿控制器实现系统完全消隙。
实验结果表明,采用双电机消隙的转台的定位精度得到有效的提高。
关键词:伺服系统;双电机消隙;定位精度0引言天线的性能参数如指向、波瓣宽度、增益等可以通过设计、计算和测试来确定,转台是天线性能参数测试时的主要设备,它可以为天线提供多种运动方式,并提供具体的位置信息。
但是由于机械加工时存在误差和机械磨损以及传动齿轮之间存在间隙,转台控制系统的跟踪精度和稳定性往往达不到预设的要求,所以消除齿轮间隙以提高传动精度显得尤为重要。
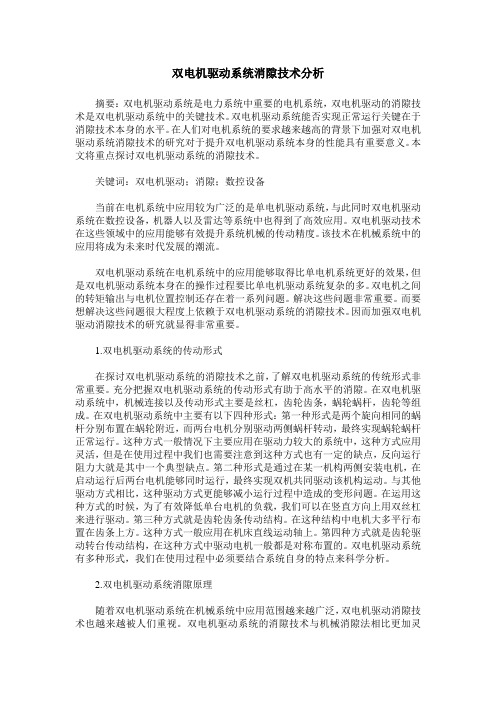
1实施方案1.1伺服系统硬件设计图1 双电机消隙伺服系统控制框架双电机消隙伺服系统控制框架如图所示,天线控制单元(威纶通触摸屏EMT3070A)通过自由协议和PCC间进行通信,实现速度指令、状态控制和状态信息等控制操作。
控制模块是实现系统闭环的关键环节,它接受来自编码器的转台位置参数和来自触摸屏、PCC的输入指令,对转台位置进行控制,并进行数字校正,实现转台的精确定位,同时监控转台运转情况,通过机械限位和软件监测实现转台的保护功能。
1.2双电机消隙原理采用双电机传动的方法来消除传动间隙,就要使一台电机工作在速度模式,作为消隙驱动的主动电机,输出的主动力矩和测试转台的运动方向一致;另外一台电机则工作在力矩控制模式下,作为消隙驱动的从动电机,为消隙机构的齿圈提供向后的张紧力。
图2 双电机消隙结构当转台顺时针运动时,电机1为速度控制模式,电机2为电流控制模式,两台电机分别作为主动电机和从动电机,力矩分别为M1、M2,则提供的总力矩M=M1-M2。
当转台工作在逆时针模式时,情况正好相反。
双电机驱动系统消隙技术分析
双电机驱动系统消隙技术分析摘要:双电机驱动系统是电力系统中重要的电机系统,双电机驱动的消隙技术是双电机驱动系统中的关键技术。
双电机驱动系统能否实现正常运行关键在于消隙技术本身的水平。
在人们对电机系统的要求越来越高的背景下加强对双电机驱动系统消隙技术的研究对于提升双电机驱动系统本身的性能具有重要意义。
本文将重点探讨双电机驱动系统的消隙技术。
关键词:双电机驱动;消隙;数控设备当前在电机系统中应用较为广泛的是单电机驱动系统,与此同时双电机驱动系统在数控设备,机器人以及雷达等系统中也得到了高效应用。
双电机驱动技术在这些领域中的应用能够有效提升系统机械的传动精度。
该技术在机械系统中的应用将成为未来时代发展的潮流。
双电机驱动系统在电机系统中的应用能够取得比单电机系统更好的效果,但是双电机驱动系统本身在的操作过程要比单电机驱动系统复杂的多。
双电机之间的转矩输出与电机位置控制还存在着一系列问题。
解决这些问题非常重要。
而要想解决这些问题很大程度上依赖于双电机驱动系统的消隙技术。
因而加强双电机驱动消隙技术的研究就显得非常重要。
1.双电机驱动系统的传动形式在探讨双电机驱动系统的消隙技术之前,了解双电机驱动系统的传统形式非常重要。
充分把握双电机驱动系统的传动形式有助于高水平的消隙。
在双电机驱动系统中,机械连接以及传动形式主要是丝杠,齿轮齿条,蜗轮蜗杆,齿轮等组成。
在双电机驱动系统中主要有以下四种形式:第一种形式是两个旋向相同的蜗杆分别布置在蜗轮附近,而两台电机分别驱动两侧蜗杆转动,最终实现蜗轮蜗杆正常运行。
这种方式一般情况下主要应用在驱动力较大的系统中,这种方式应用灵活,但是在使用过程中我们也需要注意到这种方式也有一定的缺点,反向运行阻力大就是其中一个典型缺点。
第二种形式是通过在某一机构两侧安装电机,在启动运行后两台电机能够同时运行,最终实现双机共同驱动该机构运动。
与其他驱动方式相比,这种驱动方式更能够减小运行过程中造成的变形问题。
双电机消隙

2 3 1
1 0 0 N F
TP Ei A Mn R o a Pn i D o k
i
i t s y s t e m
Masterห้องสมุดไป่ตู้Slave
3. 原理与运行模式—计算
精加工(黄色区域) 这时主动齿轮箱的输出力由安全系数C乘上加速力。 F2M_ max = c x F2a F2M_ max根据移动部件重量 m 和切削力 FP决定 => m2M_max = c x m F2M_Pmax= c x FP
Vorlagen Nr.: 1097-D005821 Rev.: 02
Ei 3,5m到 4 m X-轴 Y-s m a A Mn R o a Pn i D o k
T
P
i
i t s y s t e m
齿轮-齿条传动(龙门移动式)
3. 计算(计算)
较大的工作台面积 负载分配比(重量/切削力)70:30
i
i t s y s t e m
Master-Slave(齿轮-齿条传动主从消隙)
2.原理与运行模式—运行模式
黄色区域: 精加工(加速度较小) 灰色区域: 粗加工或快进(加速度较大), 两个小齿轮朝一个方向工作。 两个小齿轮扭矩方向相反— 无间隙
Vorlagen Nr.: 1097-D005821 Rev.: 02
优缺点g无间隙消除了齿面之间的间隙g更高的刚性2x单个刚性g更好的动态性能两个驱动单元同时工作g更高的精度因为更好的刚性和零间隙g可选用更小的减速箱电机齿轮齿条h成本更高2套驱动单元h更大的体积2x电机2x齿轮箱h更长的调试时间teamrapidovorlagennr
TP Ei A Mn R o a Pn i D o k
双电机消隙
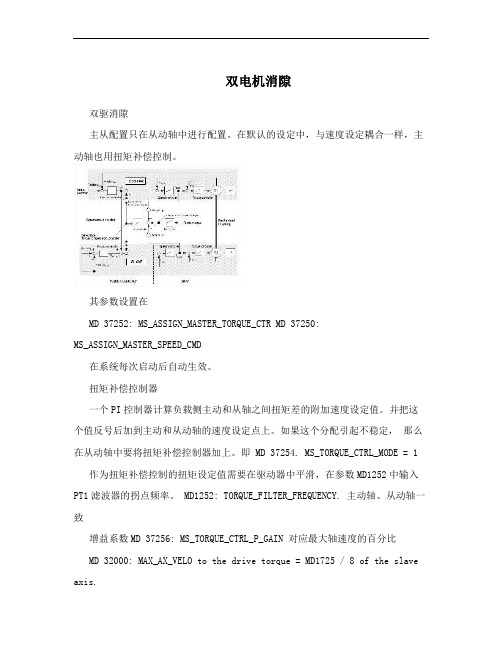
双电机消隙双驱消隙主从配置只在从动轴中进行配置。
在默认的设定中,与速度设定耦合一样,主动轴也用扭矩补偿控制。
其参数设置在MD 37252: MS_ASSIGN_MASTER_TORQUE_CTR MD 37250:MS_ASSIGN_MASTER_SPEED_CMD在系统每次启动后自动生效。
扭矩补偿控制器一个PI控制器计算负载侧主动和从轴之间扭矩差的附加速度设定值。
并把这个值反号后加到主动和从动轴的速度设定点上。
如果这个分配引起不稳定,那么在从动轴中要将扭矩补偿控制器加上。
即 MD 37254. MS_TORQUE_CTRL_MODE = 1 作为扭矩补偿控制的扭矩设定值需要在驱动器中平滑,在参数MD1252中输入PT1滤波器的拐点频率。
MD1252: TORQUE_FILTER_FREQUENCY. 主动轴、从动轴一致增益系数MD 37256: MS_TORQUE_CTRL_P_GAIN 对应最大轴速度的百分比MD 32000: MAX_AX_VELO to the drive torque = MD1725 / 8 of the slave axis.在默认设定中积分部分是无效的积分时间常数 MD 37258: MS_TORQUE_CTRL_I_TIME 以秒为单位输入。
扭矩补偿控制器的输出受参数MD 37260: MS_MAX_CTRL_VELO.的限制设定 MD 37256: MS_TORQUE_CTRL_MODE = 3或MS_TORQUE_CTRL_P_GAIN = 0,就可以使扭矩补偿控制器无效。
扭矩的分配可以通过扭矩补偿器的输入变量参数化。
从动轴的驱动扭矩可以用MD37268加权。
MD 37268: MS_TORQUE_WEIGHT_SLAVE,而主动轴的MD 37268: MS_TORQUE_WEIGHT_SLAVE, =(100 –MS_TORQUE_WEIGHT_SLAVE).当使用扭矩补偿器时机械耦合绝对是必须的,否则驱动器会从静止加速。
双电机电气消隙与单电机机械消隙对比

双电机电气消隙与单电机机械消隙对比导语:本文从原理、性价比、结构等方面说明双电机电气消隙与单电机机械消隙的区别。
一)机械消隙产品(法国REDEX产品):单个电机输入两个齿轮输出形式,(REDEX产品为一个电机输入,两个减速机带齿轮输出,通过专利技术,在减速机中间加预负载,运用机械原理将减速机内部及齿轮齿条之间的背隙全部消除)如图示:二)双电机电气消隙产品(德国STOBER产品):双电机输入两个齿轮输出形式(即,两个电机输入,两个减速机带齿轮输出,运用电气控制,致使一个电机驱动的时候,另一个电机进行制动,将齿轮齿条及减速箱内部背隙全部消除)如图示:德国STOBER双电机电气消隙与其他消隙产品的比较:STOBER电气消隙系统特点如下:结构区别:双电机电气消隙原理是将其中一个电机做制动处理,从而取得预加载力。
也就是说,一个电机驱动一个电机制动,从而消除减速机及齿轮齿条的背隙;性能优越:重复定位精度可以达到0.01(1道以内);控制灵活:需要大力矩加速的时候,两个电机可以同时驱动;硬件要求:齿条和减速机的精度没有要求,可以通过电气补偿方式让消隙效果达到最好;成本控制:比同等的欧洲机械消隙产品成本低;发展前景:性能优越、精度高、成本低,在竞争日益激烈的市场中越来越受到各个厂家的青睐;同行业应用:目前中国生产大型机床,龙门镗铣、落地镗等需要做齿条传动消隙处理的机床基本上都使用的是STOBER双电气消隙产品,主要客户应用情况见部分客户列表REDEX机械式消隙系统特点如下:结构区别:单电机机械消隙实际是通过反向的扭动其中一个齿轮来获取预加载力,也就相当于将一个齿轮固定,在另一个齿轮上加了一个扭力弹簧;性能一般:只能满足一般应用(重复定位精度一般都在0.02以上);模式固定:机械方式预设的单一工作模式,不能根据实际需求做调整;硬件要求:减速机和齿条的精度要求比较高,硬件产品的精度越高消隙效果越好,相应的增加了硬件的成本;发展现状:机械消隙产品设计巧妙,通过简单的结构消除了齿轮与齿条之间的背隙,随着社会发展,机床精度要求越来越高,机械消隙产品已经不能满足应用,越来越多的被高精度、低成本的电气消隙产品所取代。
齿轮消隙与双电机消隙的应用
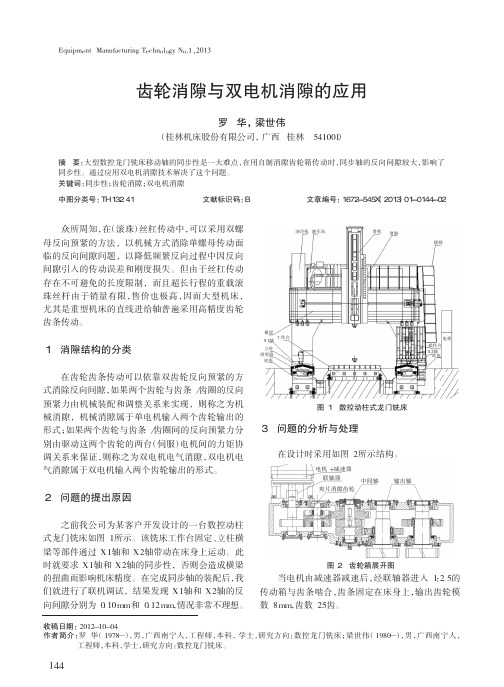
图 4 双电机驱动图示
具体做法如下:本数控动柱式龙门铣床采用西
门子 840D 数控系统。给每个电机预设一个 20 %额
定扭矩的预加应力,设定一个电机为主驱动电机,左
齿轮要求出力大;另一个为副驱动电机,右齿轮要求
出力小,如表 1 所列。Leabharlann 表 1 主、副电机驱动力矩示意
中图分类号:TH132.41
文献标识码:B
文章编号:1672-545X(2013)01-0144-02
众所周知,在(滚珠)丝杠传动中,可以采用双螺 母反向预紧的方法,以机械方式消除单螺母传动面 临的反向间隙问题,以降低频繁反向过程中因反向 间隙引入的传动误差和刚度损失。但由于丝杠传动 存在不可避免的长度限制,而且超长行程的重载滚 珠丝杆由于销量有限,售价也极高,因而大型机床, 尤其是重型机床的直线进给轴普遍采用高精度齿轮 齿条传动。
Abstract:The synchronism of the movable shaft of the large scale CNC gantry-type milling machine is a difficult problem, and the reversing space of the synchronizing shaft is larger in driving of the anti-backlash gear box by self-made, which will affect the synchronism. The problem is settled through the using of the double-motor anti-backlash. Key words:synchronism;gear backlash;double-motor anti-backlash
双电机消隙控制方法

双电机消隙控制方法:
机械调整方法:
确保主电机及调压电机的接线正确,并确保两者的相位差为90度。
打开主电机和调压电机的电源开关,使主电机进入待机状态,调压电机在较小功率下启动。
等待主电机转子旋转到一定程度后,调整调压电机的电压和频率,使其与主电机同步旋转。
在调整过程中,需要准确把握调压电机的运转状态及主电机转子的位置。
当主电机转子旋转到需要的位置时,调节调压电机的电压和频率,直至调压电机停止运转,此时消隙完成。
电子控制方法:
在两台伺服驱动器的电流环输入叠加方向相反的消隙转矩,在电机转速为0时,维持齿轮的消隙状态。
针对双电机驱动系统的间隙消除技术分析研究

摘要为了提高数控机床的传动精度,在国家863计划项目“大型舰艇螺旋桨用重型七轴五联动车铣复合加工机床”的资助下,本文研究了双电机间隙消除技术,以消除数控转台的机械传动间隙和传动误差,提高机床传动精度。
本文的主要研究内容如下:1) 通过对双电机驱动系统的结构特点的分析,阐述了这种传动方式消除间隙的基本原理、工作过程和四种较好的控制方式。
阅读大量国内外相关文献,对双电机间隙消除技术的发展状况和趋势进行深入的分析与总结。
2) 从双电机的基本结构入手,研究了驱动系统中存在的齿隙非线性因素;在考虑系统传动柔性的基础上,采用机理建模法,通过对电机电气学方程、机械动力学方程的分析与综合,将两组电机侧的参数耦合到负载侧,建立了基于永磁同步电机的双电机驱动系统的动力学模型。
3) 探讨了双电机的消隙控制算法,设计了电气预载控制器、智能PI差速负反馈控制器和模糊-PI复合位置控制器,达到转速同步和间隙消除的目的。
由电气预载控制器来产生偏置电压信号,以去除传动链中的传动间隙;由智能PI差速负反馈控制器产生校正信号,确保双电机转速同步,消除系统在动态过程中可能存在的齿隙;由模糊-PI 控制来确保转台理想的位置控制精度和响应速度。
4) 构建了整个伺服系统速度环和位置环SIMULINK仿真模型,在计算了实验平台的相应物理参数基础上,给出了最优控制器设计算法,进行控制器参数优化选择。
然后对系统的阶跃响应、正弦响应、负载扰动响应等进行试验分析,为系统的设计和现场调试提供一定的理论参考。
关键词:齿隙非线性消隙双电机同步驱动AbstractAt the support of the national 863 project -- “Seven Axis and Five-linked Turning and Milling Numerical Control Machine Tool of Manufacturing Large Marine Propeller”, the theory and technology of anti-backlash with dual-motor driving system has been researched in this paper, for the purpose to eliminate the mechanic clearance and increase the transmission precision of machine tools. The details are as following:1) According to the analyses about the structure feature of the dual-motor driving system, the basic theories has been proposed, including the working principle, process and the common control mode to eliminate transmission error. Through reading a lot of related literatures around the world, present development and their promising future of anti-backlash technologies has been analyzed and summarized based on dual-motor driving system.2) Start with analyzing the basic structure of the dual-motor driving system, the backlash nonlinearity has been studied. Then the mechanical dynamics equations and electrical equations has been synthesized. While the elasticity of the driving axis was taken into account, the kinetic model of the dual-motor driving system has been set up base on PMSM, with transforming the parameters from the side of motor to the side of load.3) The control algorithms to eliminate the backlash has been discussed, while the electrical preload controller, the intelligent PI velocity difference controller and fuzzy-PI position controller has been designed which is to eliminate the backlash in static and dynamic process and guarantee the control precision and response rapidity.4) The SIMULINK model of the whole servo system has been built and the MATLAB optimize control program has been layout. Then the parameters of the equipments have been calculated and the simulation experiment has been carried out. The result of simulation and experiment will give theory consultation for system design and field debug.Keywords:Backlash-nonlinearity, Anti-backlash, Dual-motor, Synchronized driving独创性声明本人声明所呈交的学位论文是我个人在导师的指导下进行的研究工作及取得的研究成果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4)当两台伺服电机输出同向力矩使系统以足够大的输出合力矩朝某个方向运行过程中需要减速并反向运行时,将执行由3)到1)再到2)的变化规律。
也不妨换一种描述方式来理解双电机电气消隙:
1)由两个电机分别驱动的齿轮与齿条啮合时,两个齿轮都对齿条出力,不过在绝大多数情况下都是一个力大,另一个力小。
2)轻载下,两个齿轮出力的方向相反,哪个力大就往那个方向移动,只不过出力大的齿轮驱动齿条移动,出力小的齿轮阻止齿条移动。
众所周知,在(滚珠)丝杠传动中,可以采用双螺母反向预紧的方法以机械方式消除单螺母传动面临的反向间隙问题,以降低频繁反向过程中因反向间隙引入的传动误差和刚度损失。环面包络滚子蜗杆传动,也可以借助双滚子包络环面技术以机械方式实现反向预紧,消除传动间隙。
同理,在齿轮齿条传动、齿轮齿圈传动也可以依靠双齿轮反向预紧的方式消除反向间隙,如果两个齿轮与齿条/齿圈的反向预紧力由机械装配和调整关系来实现,则称之为机械消隙,机械消隙属于单电机输入两个齿轮输出的形式;如果两个齿轮与齿条/齿圈间的反向预紧力分别由驱动这两个齿轮的两台(伺服)电机间的力矩协调关系来保证,则称之为双电机电气消隙,双电机电气消隙属于双电机输入两个齿轮输出的形式。
此前一直都在讲双电机电气消隙的力矩控制原理,需要注意的是双电机电气消隙的运行过程中,无论两个齿轮的出力方向相反,还是相同,哪怕其中一个齿轮的出力恰好为零,两个齿轮的实际运行速度名义上总是相同的。
在双电机电气消隙的实际应用中,用于消隙控制的两台电机同时就是直线伺服轴的驱动电机,在机床中驱动进给轴的伺服系统一般不会简单地工作于电流模式,虽然不排除这种应用方法,为此有必要讨论工作于速度模式或位置模式的伺服系统如何实现双电机电气消隙。
双电机消除间隙
由于丝杠传动存在不可避免的长度限制,而且超长行程的重载滚珠丝杆由于销量有限售价也极高,因而大型机床,尤其是重型机床的直线进给轴普遍采用高精度齿轮齿条传动。直线电机直接驱动技术的出现虽然在理论上可以实现无限接长,以规避丝杠传动的长度限制和超长滚珠丝杠的成本问题,但直线电机尚不足以满足某些重型机床的驱动需求,因而高精度齿轮齿条传动Байду номын сангаас是大型机床直线进给的有效解决方案。
3)工作台右移时,由和齿条左齿面啮合的齿轮向右驱动齿条;工作台左移时,由和齿条右齿面啮合的齿轮向左驱动齿条。
4)负载较轻时,两个齿轮对齿条的左右齿面施加足够大的反向驱动力,这样一来,无论朝哪个方向反向运行,都不会产生反向间隙。
5)负载足够大时,两个齿轮对齿条的同向齿面施加方向一致的驱动力,以提高负载驱动能力。
双电机电气消隙需按照特定的消隙控制曲线驱动两台电机。假设用于双电机电气消隙的两个伺服电机的规格参数完全一致,两台电机的驱动电流的最简单关系为I1=It+Io,I2=It-Io,其中Io为消隙偏置电流,It是和输出合力矩对应的目标驱动电流,不论消隙偏置电流Io的大小如何,两个伺服电机的输出合力矩为Kt*I1+Kt*I2=Kt*(It+Io)+Kt*(It-Io)=2Kt*It。不同厂商的消隙控制曲线会有各自的特色,不过都必须遵循一个统一的原则,以确保永远不会出现两个齿轮对齿条的实际驱动力同时为零的情况,即任何时候两个电机中至少有一个电机会通过齿轮对齿条施加不为零且足够大的驱动力。
相对于机械消隙,双电机电气消隙在性能上更具优势:
1)更高的重复定位精度,据称可达到1道(南方谓之1丝)。
2)更大的控制灵活性,一方面,两个电机以目标策略反方向驱动可以消除反向间隙,另一方面,当需要加大驱动力矩时,两个电机也可以同向驱动。
3)成本控制,对于可驱动大型和重型机床的大规格伺服电机而言,由于可以同时使用两台伺服电机,就有可能允许选用更小规格的伺服电机,系统综合成本反而未必高于单一大规格伺服电机驱动的机械消隙。
2)当系统需要的输出合力矩增大时,两台伺服电机的驱动电流按照特定的电流曲线变化,其中一台伺服电机的输出力矩将继续增大,另一台伺服电机的输出力矩逐渐减小至零,再反向增大,由阻力变为驱动力。
3)当两台伺服电机输出同向力矩使系统以足够大的输出合力矩朝某个方向运行过程中需要减速停止时,两台伺服电机的驱动电流将按照特定的电流曲线反转,其中输出力矩较大的一台伺服电机的驱动电流将逐渐减小到消隙偏置电流,另一台伺服电机的驱动电流则会在前一台伺服电机的驱动电流减小到消隙电流之前减小到零,再反向增大至消隙电流,输出力矩也相应地由驱动力恢复为阻力。
原则上,双电机电气消隙运行过程中,可分为以下几种工作情形:
1)当系统需要的输出合力矩为零(静止或匀速)时,两台伺服电机的驱动电流分别为±Io,对应的输出力矩大小相等、方向相反。Io为消隙偏置电流,对应的输出力矩为消隙偏置力矩,消隙偏置力矩必须足以克服传动链本身的动静摩擦阻力,以及弹性形变等传动死区环节等所需的力矩总和。
3)载荷足够大时,两个齿轮的出力方向都变得与移动方向相同,共同驱动齿条移动。
4)载荷从轻载逐渐加大的过程中,原出力方向与移动方向相反的那个齿轮的出力会逐渐变小,并越过零点,再反向变大。
5)当载荷从足够大的重载逐渐减小为轻载的过程中,原出力较小的那个齿轮的出力会逐渐变小到零,越过零点后再逐渐反向变大。
以齿轮齿条传动的双电机电气消隙为例,假设两个齿轮的轴位置固定,安装于齿轮上方的齿条在齿轮的驱动下可带动工作台沿水平方向左右移动,则双电机电气消隙的工作原理是:
1)两个电机分别驱动各自的齿轮与齿条啮合。
2)静态下,一个齿轮与齿条的左齿面啮合并适度保持向右的驱动力,另一个齿轮与齿条的右齿面啮合并适度保持向左的驱动力。
总之,由于双电机电气消隙性能优越、精度高、成本低,在竞争日益激烈的市场中仍具有良好的发展前景,并受到大型和重型机床厂家的青睐。
蜗轮蜗杆传动也同样可以采用由两台(伺服)电机分别驱动的两个蜗杆实现(双电机)电气消隙,两个蜗杆间的反向预紧力或驱动力也分别由驱动这两个蜗杆的伺服电机的力矩协调关系来保证,从而消除单一蜗杆传动难于避免的反向间隙。