D2002ED调试说明书
OTIS DO2000门机调试手册 完整版(1)

P5-6:SPARE-备用端号。
P5-7:DOB-开门信号输入端,+30VDC为高电平有效。
P5-8:DO从开门及开门信号输入端口,+30VDC为高电平有效。
P5-9:SPARE2-备用端口。
P5-10:HL2-低压接地站,此端口作为-30VDC电源,区分开HL1高压接地端与HL2低压接地端。
第三章:自学习运行
5、关门阶段落5:此段距离是,速度已减到设定的关门停止速度时,以此速度运行的一段距离,在这段距离内因门刀,开锁滚轮待限制,不能运行太快,否则门刀,滚轮及门全关时撞击亦会发出一定噪音,此速度省缺值为3HZ以此速度运行直到关尽门,以一定的关门电压维持关门状态。
BP-2002D 坚固型中文机巡检器说明书-打印版
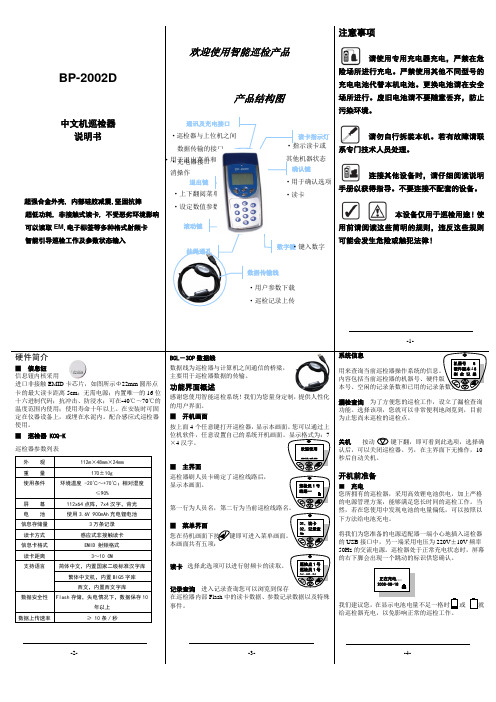
BP-2002D中文机巡检器说明书超强合金外壳, 内部硅胶减震,坚固抗摔超低功耗, 非接触式读卡, 不受恶劣环境影响 可以读取EM ,电子标签等多种格式射频卡 智能引导巡检工作及参数状态输入注意事项请使用专用充电器充电,严禁在危险场所进行充电。
严禁使用其他不同型号的充电电池代替本机电池。
更换电池请在安全场所进行。
废旧电池请不要随意丢弃,防止污染环境。
请勿自行拆装本机。
若有故障请联系专门技术人员处理。
连接其他设备时,请仔细阅读说明手册以获得指导。
不要连接不配套的设备。
本设备仅用于巡检用途!使用前请阅读这些简明的规则,违反这些规则可能会发生危险或触犯法律!硬件简介■ 信息钮 信息钮内核采用进口非接触EMID 卡芯片,如图所示Φ22mm 圆形点卡的最大读卡距离5cm ;无需电源;内置唯一的16位十六进制代码;抗冲击、防浸水;可在-40℃~70℃的温度范围内使用;使用寿命十年以上。
在安装时可固定在仪器设备上,或埋在水泥内。
配合感应式巡检器使用。
■ 巡检器 KCQ-K 巡检器参数列表外 观 112m ×48mm ×24mm重 量 170±10g使用条件环境温度 -20℃~+70℃;相对湿度≤90%屏 幕 112x64点阵,7x4汉字,背光 电 池 使用3.6V 900mAh 充电锂电池信息存储量 3万条记录 读卡方式 感应式非接触读卡 信息卡格式 EMID 射频格式 读卡距离 3~10 CM支持语言简体中文,内置国家二级标准汉字库繁体中文机,内置BIG5字库西文,内置西文字库数据安全性 Flash 存储,失电情况下,数据保存10年以上数据上传速率≥ 10条/秒BCL -30P 数据线数据线为巡检器与计算机之间通信的桥梁,主要用于巡检器数据的传输。
功能界面概述感谢您使用智能巡检系统!我们为您量身定制,提供人性化的用户界面。
■ 开机画面按上面4个任意键打开巡检器,显示本画面。
您可以通过上位机软件,任意设置自己的系统开机画面。
DO2000门机调试说明

DCSS5调试说明书一.自学习过程:(分Step1 和Step2)Step1:↓按“3”键↓按“3”键(为了得到SETUP菜单,请按 shift&7)↓按“1”键↓按“1”键↓按<GO ON/GO BACK>键,<ENTER>选择马达的类型。
↓选择开门的型式为中分或双折,TLD为双折门,CO为中分门↓选择开门的宽度,<ENTER>↓<GO ON/GO BACK>↓选择编码器的类型,<ENTER>Step2:↓观察门的移动并回答,如果门完全打开,它又开始关门↓门完全关闭,又问2.学习门的宽度:Learn DOORWAY编码器积累了开关门过程的脉冲来描述门的宽度。
当门完全打开,回答下面的问题3.学习爬行距离:Learn Creep WaysDCSS5 学习门锁距离和转矩必须从开门和关门锁,开门的爬行距离和关门的爬行距离从门锁距离开始。
↓<Enter>门将进行好几次的短路线的开和关如果爬行距离测试完成,DCSS5将进入下一步。
4.学习转矩:Learn TorquesDCSS5 用检测速度开门,找出完全开门所需的最小的转矩,如果这个跟踪行为超出了转矩的范围;测试将重新给一个增加的转矩,所有的爬行和关门转矩都取决于检测时的转矩数↓<ENTER>如果自学习转矩可使门完全打开,DCSS5关上门重新准备下一个步骤。
就结束了,显示如下:5.学习前进增益:Learn Forward Gain此参数是由速度和加、减速度来提供↓<Enter>首先开始开门运行测试间断性动作,如果距离比开门要长就重试,直到修改控制参数。
这个循环一直进行,直到找到最佳的控制参数;影响它的参数有两个p1:FeedUp-Gain; p2:FeedDown-Gain到此DCSS5已完全安装好了。
二.参数设置:KEY:333↓按“3”键↓按“3”键↓按“3”键,进入Setup-Field“参数设置范围”栏当重新写入一个参数时,DCSS将检查他的值,这个值必须在最大和最小值之间,如果参数超出这个极限,最大值将代替这个值。
德大伺服刀库调试说明书

AIS 感應伺服模組 ATC 設定建議
VERSION:2015/10/15
DEX
ቤተ መጻሕፍቲ ባይዱ
目錄
5. AIS 配線配置與建議 .......................................................................................................................
KINCO ED系列伺服驱动器使用手册
1Байду номын сангаас
KINCO ED 系列伺服驱动器使用手册
5.1 对象词典(OBJECT DICTIONARY) ............................................................. 36 5.2 对象操作表(DIRECT OBJECT ENTRY) ......................................................... 36 5.3 设备控制(DEVICE CONTROL) ............................................................... 37
2.5.1 使用原则 ........................................................................... 7 2.5.2 使用环境 ........................................................................... 8 2.5.3 安装要求 ........................................................................... 8 2.5.4 电气连接前要求 ..................................................................... 8 2.5.5 操作 ............................................................................... 8
MedWeldTD2200梅达焊接控制器参数设置说明1
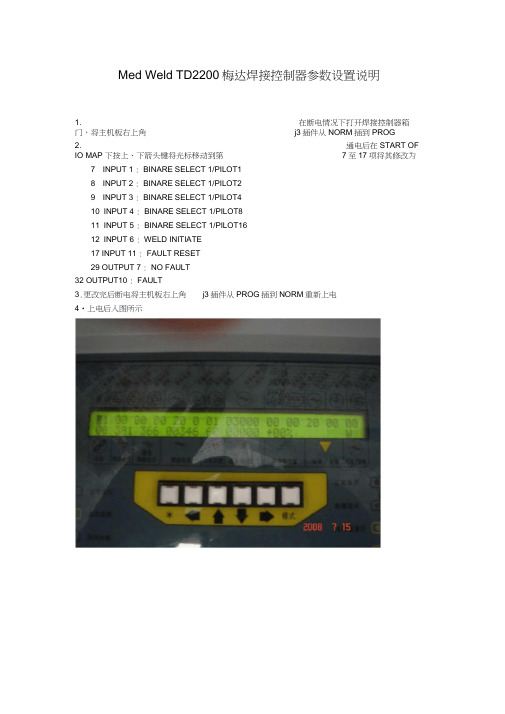
Med Weld TD2200梅达焊接控制器参数设置说明1. 在断电情况下打开焊接控制器箱门,将主机板右上角j3插件从NORM插到PROG2. 通电后在START OF IO MAP 下按上、下箭头键将光标移动到第7至17项将其修改为7 INPUT 1 : BINARE SELECT 1/PILOT18 INPUT 2 : BINARE SELECT 1/PILOT29 INPUT 3 : BINARE SELECT 1/PILOT410 INPUT 4 : BINARE SELECT 1/PILOT811 INPUT 5 : BINARE SELECT 1/PILOT1612 INPUT 6 : WELD INITIATE17 INPUT 11 : FAULT RESET29 OUTPUT 7 : NO FAULT32 OUTPUT10 : FAULT3.更改完后断电将主机板右上角j3插件从PROG插到NORM重新上电4•上电后入图所示5.按“ *”键直至进入下图画面通过左右箭头移动光标上下箭头更改参数将 (其中1-30组参数相同) SCH :程序号 PRE-HEAT :预热 01( AVC ) 02( AVC )30 (AVC ) (ACC-SEAM ) (AVC ) 31(AVC ) (AVC-SEAM ) (AVC )WELD :焊接 (ACC-SEAM )POST-HEAT :(后热) (AVC )共31组参数更改为下所示SCH 01 -SCH316.按“ *”键回到第四步所示画面后按“ MODE ”键直至进入下图画面将SCH 01- SCH 31共31组改为如下所示 SCH VALVE RET TXR PRESSURE STPR FORG E01 01 0 017 1 00 000 02 01 0 017 1 00 000 030101710000031 010 017 100 0007.按“ MODE ”键回到第四步所示画面其中液晶屏第一行第一组数字为程序号,第八组数字为电流大小,更改为如下所示01 00 00 00 20 0 01 03000 00 00 00 20 00 0002 00 00 00 20 0 01 03500 00 00 00 20 00 0003 00 00 00 20 0 01 04000 00 00 00 20 00 0004 00 00 00 20 0 01 04500 00 00 00 20 00 0005 00 00 00 20 0 01 05000 00 00 00 20 00 0006 00 00 00 20 0 01 05500 00 00 00 20 00 0007 00 00 00 20 0 01 06000 00 00 00 20 00 0008 00 00 00 20 0 01 06500 00 00 00 20 00 0009 00 00 00 20 0 01 07000 00 00 00 20 00 0010 00 00 00 20 0 01 07500 00 00 00 20 00 0011 00 00 00 20 0 01 08000 00 00 00 20 00 0012 00 00 00 20 0 01 08500 00 00 00 20 00 0013 00 00 00 20 0 01 09000 00 00 00 20 00 0014 00 00 00 20 0 01 09500 00 00 00 20 00 0015 00 00 00 20 0 01 10000 00 00 00 20 00 0016 00 00 00 20 0 01 10500 00 00 00 20 00 0017 00 00 00 20 0 01 11000 00 00 00 20 00 0018 00 00 00 20 0 01 11500 00 00 00 20 00 0019 00 00 00 20 0 01 12000 00 00 00 20 00 0020 00 00 00 20 0 01 12500 00 00 00 20 00 0021 00 00 00 20 0 01 13000 00 00 00 20 00 0022 00 00 00 20 0 01 13500 00 00 00 20 00 0023 00 00 00 20 0 01 14000 00 00 00 20 00 0024 00 00 00 20 0 01 14500 00 00 00 20 00 0025 00 00 00 20 0 01 15000 00 00 00 20 00 0026 00 00 00 20 0 01 15500 00 00 00 20 00 0027 00 00 00 20 0 01 16000 00 00 00 20 00 0028 00 00 00 20 0 01 16500 00 00 00 20 00 0029 00 00 00 20 0 01 17000 00 00 00 20 00 0030 00 00 00 20 0 01 17500 00 00 00 20 00 0031 00 00 00 20 0 01 40 00 00 00 20 00 00。
DO2000门机调试
第一章:关于DO2000门机系统DO2000是变频变压类型的门机,它输入输出接口逻辑控制及驱动部分都集成于一电子板中,该类型门机使用220VAC交流电源经微处理控制逆变调压调频输出三相交流电来驱动动性马达运转由马达带动一皮带皮带以一固定支架连接该轿门从而马达转动时皮带带动轿门运行,门机运行以频率为速度调整的单位以改变频率实现改变速度距离的单位可精到毫米此门机性能良好技术成熟应得到客户承认。
第二章:自学习运行前的准备检查所有连入门机的连线(包括弧20VAC电源线)主要有下列线:•P1:L1—主电源VAC中的相线PE—主接地线N-主电源220VAC中的零线•P8P9P10由门机板输出到马达U,V,W三相电源•P13PE-马达的接地线•P2—1:EDS-与安全回路相连接,AC110V,急停信号,高电平有效•P2-2:TCL—是轿顶的检修信号,AC110V,高电平有效。
•P2—4:HL1-另一AC110V的接地线。
•P3-1:+15V 200MA--速度传感器的+15V电源。
•P3-2:T1-速度传感器反馈给门机信号1•P3-3:T2—速度传感器反馈给门机信号2.•P3-4: GND-速度传感器的—15V电源。
•P3—5:SHIELD ENCODER CABLE—屏蔽及接地。
•P4—1:RXAO•P4—2:RXBO•P4—3:TXAO•P4—4 :TXBO与门机的串行通信线。
•P5—1:+30VINPUT—给门机板的+30VDC工作电源。
•P5—2:DOS—输出+30VAC•P5—3:DOL•P5—4:ISO-门区安全信号输出端号,低电平有效,最高电压为+30VDC.•P5-5:NDG/EDP—强迫关门信号输出端,最高电压为+30VDC.•P5-6:SPARE-备用端号.•P5—7:DOB-开门信号输入端,+30VDC为高电平有效。
•P5-8:DO从开门及开门信号输入端口,+30VDC为高电平有效。
•P5—9:SPARE2—备用端口。
D2002E专业技术说明书08年版.
AmCells数字传感器 (KLDC 型及其称重显示器 (D2001E/D2002E型说明书 2005年 8月版目录第一章概述 (2)一、数字传感器基本工作原理二、称重显示器原理三、系统特点四、数字传感器与仪表通讯格式第二章技术参数 (3)一、 KLDC 型数字传感器技术指标二、 D2001/D2002型称重显示器技术指标第三章安装连接 (5)一、仪表前视图和后视图二、传感器与仪表的连接三、打印机与仪表的连接四、大屏幕与仪表的连接使用五、串行通讯接口第四章查看传感器内码................................................................................. 10 第五章角差调整 (11)一、手动方式二、自动方式(四角自动调整第六章标定................................................................................................ 13 第七章修改传感器地址................................................................................. 16 第八章传感器替代功能设置........................................................................... 18 第九章安装调试 (19)一、秤台和传感器的安装二、仪表参数设定三、秤台的安装调整四、四角误差调整五、标定第九章操作方法 (21)一、开机及开机自动置零二、手动置零(半自动置零三、去皮功能操作四、日期与时间的设置及操作五、数据记录的贮存操作六、称重数据的删除七、日报表打印八、注意事项第十章常见故障与解决方法………………………………………………………………… 24 第十一章维护保养及注意事项 (27)第一章概述一、数字传感器基本工作原理数字式传感器系统,是在传统电阻应变式传感器基础上,结合现代微电子技术,微型计算机技术的集成而发展起来的一种新型的电子称重技术。
爱登堡调试、使用、维护、说明EDVF22、32E(V2.31)
Illustration for adjustment,using and maintenance
适用 EDVF22、32E 控制系统
For EDVF22、32E control system V2.31
2009.03
EDVF22、32E(V2.31)调试、使用、维护说明
前言
上海爱登堡电梯有限公司技术文件
感谢您选择并使用上海爱登堡电梯有限公司的有机房系列电梯。
EDVF22、32E 电控系统是我司自主开发的高性能 VVVF 电梯系统,调试
简单,性能稳定,适用于群控电梯。在调试本系列电梯前,谨请仔细阅读该手
册,以确保日后电梯能够正常安全的运行。本手册为随机发送的附件(其中第
一部分为安装调试,第二部分为使用维护),请您使用后务必妥善保管。本手册
2.2.1 轿厢主控器( GOW-01C) 通讯接口 P9 端子定义:
代号 1 2
说明 通讯信号正极 CANH 通讯信号负极 CANL
代号 3 4
2.3 轿厢主控器( GOW-01C) P10 端子电气接口:
说明 24V 电源负极 24V 电源正极
2.3.1 轿厢主控器( GOW-01C) P10 端子功能:
六、 平衡系数的检查:
在进入快车调试之前应先检查电梯的平衡系数是否达到规定的 40%~50%。具体方法 是在轿厢内放入相当于该电梯额定载重 40%~50%的载荷,将轿厢置于与对重同样的高 度,切断总电源,在机房内由一人使制动器松闸,另一人用手上下盘动电动机轴上的 盘车手轮,即可感觉出轿厢与对重是否平衡。如轿厢侧偏重,则应加对重铁,反之则 卸掉部分对重铁,直至两边基本相等。该项检查仅为初步调查,精确的平衡系数测定 需待电梯正常运行后采用电流法测平衡系数。
DOP200泵的操作手册收集资料
类型:泵的类型编号:零件号和系列号订单号:制造商订单编号序列号:序列号WK.: 生产周/年生产商:DESMI A/S DK-9400 Nørresundby电话 +45 96 32 81 11 传真 +45 98 17 54 991.0综述目录代斯米卸载泵,类型DOP-2002.0 运输和安装2.1 2.2 泵的运输安装3.0 应急策略3.1 3.2 3.3 3.4 DOP-200泵的现场操作就位摆放回收4.0运行4.1 4.2 4.3 4.4 4.5运行之前泵的运行运行后的回收运行后检查爆炸性环境5.0预防性检修5.1 5.2 5.3 5.4 必需的工具和物品运行后运行间隙和储存期间液压马达和轴承外壳6.0 设备保养6.1 6.2 6.3 6.4 6.5 6.6 6.7 必需的工具和物品盘轮安装盘的检查/更换泵螺杆、密封环、盘轮轴、盘轮轴承、密封盘/轴承盘、耐磨盘和V型密封的检查/更换定子切割刀的检查/调整/更换液压马达的检查/更换圆锥形滚柱轴承和轴密封的检查/更换输出连接器的更换7.0 故障维修1.0技术规格1.1尺寸/流量1.2材料规格1.3液压系统2.0图纸附录:DOP-200 尺寸图481488DOP-200 安装图4814443.0DOP-200 零件清单4.0DOP-200 推荐的备件清单4.1 4.2推荐的标准备件, 681945推荐的2年使用的备件, 6819855.0丹佛斯液压马达备件清单/使用细则1.0综述代斯米卸载泵,类型DOP-200(参见附录的尺寸图和安装图),专门用于多种应急和辅助泵送工作。
适于处理极其粘稠的液体,像重型原油或糖蜜状物质;也适于处理低粘度液体,如柴油燃料或水;它也可以处理溢油现场常见的垃圾。
该泵会轻柔地处理中度的没有进行混合的和乳化了的介质,比如油和水。
可应用在以下方面,比如:·· · · · ·重型原油、燃料油或乳化物的应急卸载 收油系统(收油机)中的输油泵 油坑的清理 应急消防辅助输出或压载 应急舱底排水The DESMI DOP-200 的基本设计源于改进的阿基米德螺杆泵。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、秤台和传感器的安装....................................... 20 二、称重显示器参数设定....................................... 20 三、秤台的安装调整........................................... 20 四、四角误差调整 ............................................ 21 五、标定 .................................................... 21
严禁在秤台上进行电焊操作或其他强电操作,在雷雨季节,必须落实可靠的避雷措施, 防止因雷击造成传感器和称重显示器的损坏,确保操作人员的人身安全和称重设备及相 关设备的安全运行。
三、打印机与称重显示器的连接
1、打印机接口采用标准的并行输出,接插件采用 D 型 25 芯插头座,其各引脚的定义
见图 2-4。
数字传感器具有数据自动采集预处理,存贮和记忆功能,并具有唯一标记,多只 传感器组秤后,仪表可分别检查每个传感器的状态,便于故障诊断。 5、具有较高的组秤灵活性 6、保密性好,具有防作弊功能:
能有效防止遥控器作弊,一旦发现就会自动采取出错报警。 7、各接口与微处理器隔离 8、标定与参数设置分开
1、性能指标 置零范围
2、显示 分度值
小数点 3、通讯接口
4、打印接口 5、键盘
数字键 功能键 6、实时时钟
7、数据贮存 8: ±4% ±10% ±20% ±40% ±100%F.S 可选 置零键:±1% ±2% ±4% ±10% ±20%F.S 可选 6 位 VFD 显示, 6 个状态指示符。 1,2,5*10k,(k 为正整数、负数和零)可分两个量程段进 行设置 0~3 位小数可设置 大屏幕通讯方式:RS232 和 20mA 电流环可选 PC 通讯方式: RS232 标准 25 针并行接口
第十章 操作方法...................................................................................................................... 22
一、开机及开机自动置零....................................... 22 二、手动置零 ................................................ 22 三、去皮功能操作 ............................................ 22 四、日期与时间的设置及操作................................... 22 五、数据记录的贮存操作....................................... 22 六、补充打印: ............................................... 24 七、称重数据的删除:......................................... 24 八、日报表打印 .............................................. 24 九、注意事项 ................................................ 24
ST DO D1 D2 D3 D4 D5 D6 D7
BUSY
1 2 3 4 5 6 7 8 9 10 11 12 13
14 15 16 17 18 19 20 21 22 23 24 25
GND (图 2-4)打印机接口信号
-4-
2、打印须知: ▢!打印功能必须在设置后,方可投入正常使用。 ▢!称重显示器打印端口输出引线与打印机连接必须准确无误,须使用专用的打印连接线。
目录
第一章 仪表特点........................................................................................................................ 1 第二章 技术参数........................................................................................................................ 1 第三章 安装连接........................................................................................................................ 3
一、称重显示器前视图和后视图.................................. 3 二、数字传感器与称重显示器的连接 .............................. 4 三、打印机与称重显示器的连接.................................. 4 四、大屏幕与称重显示器的连接使用: ............................ 5 五、串行通讯接口:............................................ 7
≤85%RH 15 分钟 500mA GB/T 7724-2008 n=3000 III pi =0.5 IP43 I类
▢!特别提醒:
本公司称重显示器的交流电源地线必须可靠接地,以确保人身安全和称
重显示器性能的可靠性!
-2-
第三章
一、称重显示器前视图和后视图
安装连接
(图 2-1)前 视 图
(图 2-2) 后 视 图
D2002E 型
电子称重仪表
调试说明书
2012 年 4 月版
●使用前请仔细阅读本产品说明书 ● 请妥善保管本产品说明书,以备查阅
宁波柯力传感科技股份有限公司
浙换 2012F123-33
浙制 00000577 号
▢!安全需知
1、非专业人事,请勿拆卸仪表。 2、传感器与仪表的连接必须可靠,传感器的屏蔽线必须可靠接地,连接线不 允许在仪表通电的状态下进行插拔,防止静电损坏仪表或传感器。 3、传感器和仪表都是静电敏感设备,在使用中,必须切实采取防静电措施, 严禁在秤台上进行电焊操作或其他强电操作,在雷雨季节,必须落实可靠的 避雷措施,防止因雷击造成传感器和仪表的损坏,确保操作人员的安全和称 重设备及相关设备的安全运行。 4、请确保仪器可靠接地(接地阻抗<0.1Ω )。勿与其它大功率负载共同接地。
0—9 20 个(其中 10 个与数字键复合使用) 可显示年/月/日、时/分/秒,自动闰年、闰月调整。 断电数据保护 可贮存 256 条称重记录, 256 组车号, 断电数据保护
AC 220V 50Hz -10℃ ~ 40℃ -25℃—55℃
-1-
相对湿度 预热时间 保险丝 9、执行标准: 10、最大检定分度数: 11、准确度等级: 12、误差分配系数: 13、IP 等级: 14、设备等级:
第十一章 定时关机功能设置.................................................................................................... 25 第十二章 常见故障与解决方法 ............................................................................................... 26 第十三章 维护保养及注意事项 ............................................................................................... 29 附录一 出厂默认参数............................................................................................................ 30
附单: ....................................................... 31
第一章 仪表特点
1、具有高精度、高可靠性 2、一致性、互换性好 3、信号抗干扰能力强
数字传感器的通讯传输距离可达 75 米,抗干扰能力明显增强,数字传感器内模 拟信号的传输距离极短,同时传感器外壳(弹性体)本身又是一个良好的屏蔽罩,仅 这两个特点决定了其抗干扰能力的优势,在很大程度上提高了系统的稳定性。 4、具有自我识别功能,便于故障诊断
-3-
二、数字传感器与称重显示器的连接
1、▢!数字传感器的连接采用 5 芯航空插头。图 2-3 标注了各引脚的意义。 2、▢!数字传感器与称重显示器的连接必须可靠,数字传感器的屏蔽线必须可靠接地。连
接线不允许在称重显示器通电的状态下进行插拔,防止静电损坏称重显示器或传感器。 3、▢!数字传感器和称重显示器都是静电敏感设备,在使用中必须切实采取防静电措施,
倘若连接错误,将损坏称重显示器输出端口或打印机输入端口,甚至损坏称重显示器 和打印机。 ▢!在使用打印机时,必须先将连接线准确连接,再接通称重显示器电源,最后开启打印