回参考点故障
数控机床回参考点的故障分析与排除

数控机床回参考点的故障分析与排除1概述数控机床回参考点时根据检测元件的不同分绝对脉冲编码器方式和增量脉冲编码器方式两种,使用绝对脉冲编码器作为反馈元件的系统,在机床安装调试后,正常使用过程中,只要绝对脉冲编码器的后备电池有效,此后的每次开机,都不必再进行回参考点操作。
而使用增量脉冲编码器的系统中,机床每次开机后都必须首先进行回参考点操作,以确定机床的坐标原点,寻找参考点主要与零点开关、编码器或光栅尺的零点脉冲有关,一般有两种方式。
1)轴向预定点方向快速运动,挡块压下零点开关后减速向前继续运动,直到挡块脱离零点开关后,数控系统开始寻找零点,当接收到第一个零点脉冲时,便以确定参考点位置。
配FANUC系统和北京KND系统的机床目前一般采用此种回零方式。
2)轴快速按预定方向运动,挡块压向零点开关后,反向减速运动,当又脱离零点开关时,轴再改变方向,向参考点方向移动,当挡块再次压下零点开关时,数控系统开始寻找零点,当接收到第一个零点脉冲,便以确定参考点位置。
配SIEMENS、美国AB系统及华中系统的机床一般采用这种回零方式。
采用何种方式或如何运动,系统都是通过PLC的程序编制和数控系统的机床参数设定决定的,轴的运动速度也是在机床参数中设定的,数控机床回参考点的过程是PLC系统与数控系统配合完成的,由数控系统给出回零命令,然后轴按预定方向运动,压向零点开关(或脱离零点开关)后,PLC向数控系统发出减速信号,数控系统按预定方向减速运动,由测量系统接收零点脉冲,收到第一个脉冲后,设计坐标值。
所有的轴都找到参考点后,回参考点的过程结束。
数控机床回不了参考点的故障常见一般有以下几种情况:一是零点开关出现问题;二是编码器出现问题;三是系统测量板出现问题;四是零点开关与硬(软)限位置太近;五是系统参数丢失等等。
下面以本人在工作中遇到的几个实例介绍维修的过程。
2维修实例例1)XH714加工中心开机回参考点,X轴向回参考的相反方向移动。
毕业设计论文PPT答辩-FANUC-0i系统数控机床回参考点故障诊断与分析

第2章 数控机床的参考点
图2-3 增量栅格法返回参考点原理
10
第2章 数控机床的参考点
2、磁开关法
磁开关法是在机械本体上安装磁铁及磁感应原点开关 或者接近开关,当磁感应原点开关或接近开关检测到原点 信号后,进给电机立即停止,该停止点被认作为原点。磁 开关法常用于开环系统,由于开环系统没有位移检测反馈 装置脉冲编码器或光栅尺,所以不会产生栅格信号,通常 利用磁感应开关回零定位。
8
第2章 数控机床的参考点
继续移动。减速可削弱运动部件的移动惯量,使零 点停留位置准确。
(3)栅格法是采用脉冲编码器上每转出现一次的栅 格信号(又称一转信号PCZ)来确定参考点,当减速 撞块释放减速开关,触点状态由断转为通后,数 控系统将等待编码器上的第一个栅格信号的出现。 该信号一出现,工作台运动就立即停止, 同时数 控系统发出参考点返回完成信号,参考点灯亮, 表明机床回该轴参考点成功。有的数控机床在减 速信号由通(ON)转为断(OFF)后,减速向前继续 运动,当又脱开开关后,轴的运动方向与机床会 向相反的进给方向运动, 直到数控系统接受到第 一个零点脉冲,轴停止运动。同时数控系统发出 参考点返回完成信号,参考点灯亮,表明机床回 该轴参考点成功。
20
第3章 回零点的故障案例与分析
案例二: 某配套FANUC-0i系统的数控机床,回参考点动作正常,
但参考点位置随机性大,每次定位都有不同的值。 诊断:
由于机床回参考点动作正常,进一步检查发现,参考 点位置虽然每次都在变化,但却总是处在减速撞块放开后 的位置上。因此,可以初步判定故障的原因是由于脉冲编 码器“零脉冲”不良或丝杠与电动机间的连接不良引起的 故障。该机床伺服系统为半闭环结构,维修时采用隔离法, 脱开电动机与丝杆间的联轴器,手动压下减速开关,进行
有挡块式返回参考点故障的诊断与维修

下面以 FANUC 0i-D 系统的数控机床为例,简述有挡块式返回参考点的相关参数及其 设定方法。
Байду номын сангаас(1) 相关参数介绍 1)位置检测设定参数。
参数 1815
#7 #6 #5 #4 #3 #2 #1 #0
APC APZ
OPT
1815#1(OPT)决定位置检测装置。当 1815#1(OPT)设为 0 时表示机床采用电 动机内置脉冲编码器进行位置检测,设为 1 时表示使用分离型脉冲编码器或直线尺。
合
分值 师评 自评 互评 计
20
30
30 10
生文安 产明全
10
合计
100
有挡块式返回参考点故障的诊断与维修 实训2 诊断与维修自动停机故障 【任务描述】
某企业机加工车间一台使用 Oi Mate MD 系统的数控铣床,回零时发现其有 减速过程,但是找不到零点,须现场排除此故障。
【任务实施】
请结合现场实际,并参考教材内容,按如下步骤完成实训1: 1.观察故障现象 2.分析故障原因 3.诊断与排除故障 4.通电测试 5.对接交付使用 6.总结提升
程),减速信号(*DEC)由通(1)转为断(0)状态,工作台进 给会减速,按参数设定的慢速进给速度(V2)继续移动(减速可削弱运动部件的移
动惯量,使零点停留位置准确)。
有挡块式返回参考点故障的诊断与维修
3)栅格法是采用脉冲编码器上每转出现一次的栅格信号(又称一转信号 PCZ)来确定 参考点,当减速挡块释放减速开关(图 4-1-3 中③→④的过程),减速信号由断(0)转为 通(1)后,数控系统将等待编码器上的第一个栅格信号的出现。该信号一出现,工作台运 动就立即停止,以此位置作为机床零点,同时数控系统发出参考点返回完成信号,参考点灯 亮,表明机床该轴返回参考点成功。
数控机床回参考点的故障分析和排除
数控机床回参考点的故障分析和排除数控机床参考点又名原点或零点,是机床的机械原点和电气原点相重合的点,是原点复归后机械上固定的点。
机床参考点确立后,各工件坐标系随之确立,即参考点为工件坐标系的原始参照系。
文章通过对数控机床回参考点的确立,并结合回参考点的故障维修实例,从而归纳总结出回参考的故障排除方法。
标签:数控机床;参考点;测量反馈元件1 参考点的确立数控系统按检测反馈元件测量方式的不同分为绝对脉冲编码器方式和增量脉冲编码器方式两种。
数控系统反馈元件采用绝对脉冲编码器,坐标值实际位置是靠位置检测装置的电池来维持,因此系统断电后,绝对脉冲编码器会记住当前位置。
在数控机床正常使用过程中,只要保证绝对脉冲编码器的后备电池有效,机床开机就不需要再进行回参考点操作。
而采用增量脉冲编码器的数控系统,系统断电后,工件坐标系的坐标值就会消失,因此机床每次开机后都必须先进行回参考点操作,通过参考点来确定机床的坐标原点,从而建立正确的机床坐标系。
除此之外,机床在按下急停开关及机床出现故障并修复后都需要进行一次手动回参考点的操作。
数控机床各轴回参考点的运动中,各轴的运动速度是在机床参数中设定的,并且数控系统是通过PLC的程序编制和数控系统的参数设定决定的,因此,数控机床各轴回参考点是通过PLC和数控系统配合完成的。
2 数控机床回参考点的故障维修实例下面介绍几个第一重型机械集团公司的数控机床回参考点的故障维修实例:例1军工分厂一台型号为TK6516数控铣镗床,数控系统为SIEMENS840D,Y轴出现回参考点位置的准确性差的故障,从而影响加工精度的故障。
维修人员首先检查该机床Y轴测量编码器的+5V电压是正常的,并且该轴在手动方式下能正常工作,回参考点的动作过程也正常,再检查参考点减速速度参数MD34040、位置环增益参数MD32200设置也都正确。
分析可能是由于编码器“零脉冲”受到干扰而引起的此故障,再经过仔细检查该故障轴后,发现该轴编码器的连接电缆的屏蔽线脱落,重新连接脱落的屏蔽线后,该故障轴回参考点位置准确,机床加工精度恢复。
FANUC-0i系统数控机床回参考点故障诊断与分析
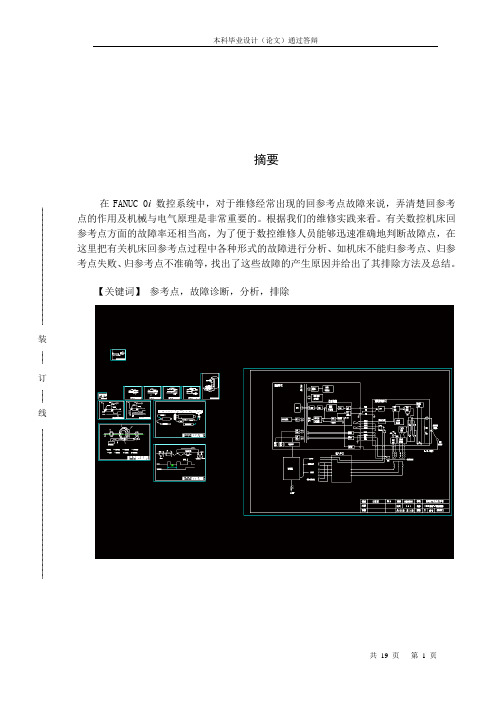
摘要在FANUC 0i数控系统中,对于维修经常出现的回参考点故障来说,弄清楚回参考点的作用及机械与电气原理是非常重要的。
根据我们的维修实践来看。
有关数控机床回参考点方面的故障率还相当高,为了便于数控维修人员能够迅速准确地判断故障点,在这里把有关机床回参考点过程中各种形式的故障进行分析、如机床不能归参考点、归参考点失败、归参考点不准确等,找出了这些故障的产生原因并给出了其排除方法及总结。
【关键词】参考点,故障诊断,分析,排除目 录摘要第1章 绪论 (1)1.1、数控机床的发展 (1)1.2、数控机床故障诊断技术的发展 (3)第2章 数控机床的参考点 (5)2.1、什么是参考点 (5)2.2、回参考点的目的 .........................................................6 2.3、回参考点的原理 (6)2.4、回参考点的方式 (10)第3章 回零点的故障案例与分析 (13)3.1、故障类型与分析 .........................................................13 第4章 小结 (18)参考文献 ………………………………………………………………19第1章 绪论1.1 数控机床的发展数字控制(Numerical Control)技术,简称数控(CNC)技术,是指用数字指令来控制机器的动作。
采用数控技术的控制系统成为数控系统。
采用存贮程序的专用计算机来实现部分或全部基本数控功能的数控系统,称为计算机数控(CNC )系统。
装备了数控系统的机床称为数控机床.数控技术是为了解决复杂型面零件加工的自动化而生产的。
1948年,美国PARSONS 公司在研制加工直升飞机叶片轮廓用检查样板的机床时,首先提出了数控机床的设想,在麻省理工学院的协助下,于1952年试制成功了世界上第一台数控机床样机。
后又经过三年时间的改进和自动程序编制的研究,数控机床进入了实用阶段,市场上出现了商品化数控机床。
数控机床回参考点故障分析与排除过程论文

数控机床回参考点的故障分析与排除过程摘要:本文针对数控机床回参考点故障的常见类型,通过分析回参考点的方式以及回参考点故障的排除方法,并以实例分析排除故障,使大家了解数控机床回参考点的故障分析及排除方法。
关键词:数控机床回参考点故障排除0 引言数控机床回参考点就是我们常说的机床回零点。
数控机床的参考点是机床厂家设定的(一般是接近机床各坐标轴的正极限位置)通常是不能改变的,通过机床正确回参考点,cnc系统才能确定机床的原点位置。
数控机床的原点是数控生产厂家设定在机床上的一个固定点,作为机床调整的基准点。
回参考点的操作是数控机床重要的功能环节之一,但由于操作频繁,在这个过程中常会遇到各种问题,若回参考点出现故障,将无法进行程序加工,回参考点的位置不准确,将影响到加工精度,甚至出现撞车事故。
因此,掌握回参考点常见故障的分析及诊断方法是非常必要的。
1 返回参考点的方式数控机床回参考点时根据检测元件的不同分绝对脉冲编码器方式和增量脉冲编码器方式两种,使用绝对脉冲编码器作为反馈元件的系统,由于系统断电后位置检测装置靠电池来维持坐标值实际位置的记忆,所以在机床安装调试后的正常使用过程中,只要绝对脉冲编码器的后备电池有效,机床开机不必再进行回参考点操作。
而使用增量脉冲编码器的系统,由于系统断电后,工件坐标系的坐标值就失去记忆,所以机床每次开机后都必须先进行回参考点操作,通过参考点来确定机床的坐标原点,建立正确的机床坐标系。
另外机床在按下急停开关后以及机床出现故障并修复后都需要进行一次返回参考点的操作。
回参考点方式一般有如下五种:1.1 轴向预定点方向快速运动,挡块压下零点开关后减速向前继续运动,因栅格法是采用脉冲编码器或光栅尺发出的栅格信号来确定脉冲参考点的,所以当轴部挡块压下零点开关后,系统开始查询脉冲编码器或光栅尺发出的基准信号,当该信号出现时,便控制回参考点坐标轴制动停止。
此时所处位置便是数控机床坐标系的参考点。
数控机床返回参考点常见故障分析
如上述测量的值在规定范围内,说明: 如上述测量的值在规定范围内,说明:
1)减速开关及接线不良,活更换减速开关 或重新接线 2)减速挡块位置不正确,重新调整减速挡块 3)进给伺服电动机内装编码器不良,拆开伺服电动机内 装编码器进行清洗,检查连接电缆及电缆的插座是否 良好 4)全闭环检测装置不良或有灰尘及油污,清洗光栅尺的 长光栅 5)如果只是每天早上首先开机出现,则更换系统的备份 电池 6)伺服放大器或者系统主板不良,则更换不良部件
2、机床能够正常执行返回参考点操作,但 参考点位置出现随机偏差
出现上述测速量超差的原因及处理方法: 1)伺服电动机与丝杠联结松动,紧固伺服电动 机与丝杠的联轴节。 2)丝杠螺母副间隙过大,调整丝杠螺母副的间 隙或者更换整套丝杠螺母副 3)丝杠两端固定或支撑的轴承间隙过大或不良, 调整丝杠两端的轴承间隙或更换轴承
数控机床返回参考点常见故障分析
主要内容: 1、数控执行返回参考点控制中
出现超程报警 2、机床能够正常执行返回参考 点操作,但参考点位置出现随 机偏差 3、机床参考点绝对位置丢失报 警(#300)
1、数控执行返回参考点控制中出现超程报 警
1、机床执行返回参考点控制中出现超程报警 (1)机床返回参考点过程中无减速动作或者一 直以减速移动故障原因 1)减速开关及接线不良 2)减速开关与挡块位置不当 3)减速开关信号系统的I/O接口故障 4)系统本身不良
故障的诊断: 通过系统PMC状态监控画面,检查机床在返回 参考点控制过程中信号是否正常,如果信号不 变化,则为减速开关不良。如果信号变化正常, 则为系统本身故障
(2)机床返回参考点过程中有减速动作 故障原因: 1)机床离参考点位置太近 2)减速挡块与机床超程保护开关太近 3)系统一转信号不良 故障的诊断与处理
回参考点的故障及处理方法

机 械管理开发
ME CHANI C AL MANAGE MEN T AND DE VEL O PMEN T
T o t a l 1 7 5
No . 1 1 , 2 0 1 7
峨蚋麟
D O I : 1 0 . 1 6 5 2 5 0 . c n k i . c n l 4 - 1 1 3 4 / t h . 2 0 1 7 . 1 1 . 1 6
1 . 2 . 2 F A N U C 0 - T系统 1 ) 选择 H A N D L E方式 , 用手轮将机床刀 台移到 靠 近参 考位 置处 。 2 ) 选择 M D I 方式 , 将参数 P 2 1 = 1 0 0 0 , P 2 2 = 0 , 机 床关断 电源。
3 ) 开机, 参数 P 2 1 = 1 0 1 1 , 机床关断电源 。 4 ) 开机 , 参数 P 2 2 = 0 0 1 1 , 机床关断电源 。
的电动机每转的栅格信号使伺服电动机停止 ,将该 位置 定位 机床 的参 考 点 。 选择一个适合操作的位置 ,设置挡块和减速开 关, 把这个位置作为机床的零点。具体操作如下:
置, 从而建立一个正确的机床坐标系。 这就是数控机
床返 回机床参考点 的目的。 机床坐标轴移动到预先指定好 的准确位置 ( 即 参考点) , 这个参考点到位后把该点的机床坐标值人
到一转信号后 ,按系统参数设定方向移动到栅格信 号位置停止 , 该位置为机床的参考点位置 , 回参考点
操作 完 成 , 见图 1 。
实际坐标记数器 出错( 发生多记或少记现象) 的故障,
不管该轴进行多少次往复运动操作 ,机床控制系统
总能保持 以参考点为基准 ,保持实际位置与实际坐 标的一致 。 一旦机床在运动中出现坐标轴出错 , 机床 出现报警 , 且 自动要求执行重新返 回参考点的操作 , 在重新返 回参考点之前 , 报警无法消除 , 也不能进行 自动循环 和 M D I 操作 。因此 , 上述指定的参考点位
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三、故障诊断与维修
第一种情况:机床回参考点无减速动作,一直 运动到触及限位开关超程而停机,没有找到参 考点。 故障诊断:减速开关失效,接触开关压下后不 能复位,或减速挡块松动而移位,零点脉冲不 起作用,致使减速信号没有输入到数控系统 故障维修:
回参考点故障
图9 诊断维修流程图
回参考点故障
回参考点故障
图1 某数控机床参考点和原点位置关系图
回参考点故障
二、数控机床返回参考点的工作方式
1.方式一:
回参考点时,轴先以快移速度V1向参考点快速移动, 碰到参考点开关挡块后,减速到V2并继续前移,脱开挡 块后,当轴到达测考点偏移量而停止于 参考点。如图2所示:
回参考点故障
图3 方式二
回参考点故障
3. 方式三
回参考点时,轴先以速度V1快速向参考点 方向移动,碰到参考点开关后速度制动到零, 然后反向以速度V2慢速移动,到达测量系统零 标志产生栅格信号时,速度即制动到零,再前 移参考点偏移量而停止于参考点。如图4所示:
回参考点故障
图4 方式三
回参考点故障
回参考点故障
三、XH713/4加工中心返回参考点的工作过程
图6 XH713/4加工中心 返回参考点的工作过程
回参考点故障
图7 XH713/4加工中心 返回参考点的操作流程
四、常见故障分析
1.故障类型
类型一:出现超程并报警。 类型二:回不到参考点,参考点指示灯不亮。 类型三:回参考点时报警,并有报警信息
回参考点故障
4.返回参考点故障诊断与维修的一般流程
图8 返回参考点故障诊断与维修流程图
回参考点故障
5.注意事项
(1)事先掌握数控机床实际出厂时的机床参考点的具 体位置。
(2)调整后要重新进行螺距误差补偿和重新对刀进行 刀具补偿。
(3)如果机床为加工中心,还要对换刀点进行重新调 整,否则容易出现换刀时撞刀故障。
回参考点故障
任务实施:
一、任务准备 设备:XH713/4加工中心若干台 资料:与设备对应的数控系统操作说明书,机 床厂家提供的机械说明书、电气说明书、维修 手册,机床使用单位提供的维修记录单等 工具:机床维修常用工具包、千分表或激光测 量仪等。
回参考点故障
二、故障勘察
该加工中心配用FANUC-OMD控制系统,采用 半闭环控制方式,使用增量脉冲编码器做为检 测反馈元件,采用方式一返回参考点。出现超 程报警,回参考点绿灯不亮,数控系统出现 “NOT READY”状态。出现故障后,操作工人 没有再开过机床,也没有断电。
回参考点故障
相关知识:
一、数控机床返回参考点的工作原理
采用增量编码器或光栅尺回参考点的方法称为增 量栅格法。在机床断电后编码器或光栅尺就失去了 对各坐标位置的记忆,因此在每次开机后都必须让 各坐标轴回到机床的一个固定点上,这一操作就称 为回参考点或回零操作。目前数控机床多采用带减 速挡块的栅格信号返回参考点控制,XH713/4加工 中心就是采用增量栅格法回参考点。
图5 方式四
回参考点故障
数控机床回参考点的过程是PLC系统与数控系统配合 完成的,由数控系统给出回零命令,然后轴按预定方向 运动,压下零点开关(或脱离零点开关)后,PLC向数控 系统发出减速信号,数控系统按预定方向减速运动,由 测量系统接收零点脉冲,收到第一个脉冲后,设计坐标 值。所有轴都找到参考点后,回参考点的过程结束。
引言
数控机床操作第一步是干什么? 那么,怎么回参考点呢? 那机床参考点又是如何设定的? 如何解决回参考点的故障呢?
回参考点故障
任务:加工中心返回时未找到参考点
教学目标: 返回参考点故障的诊断思路及排除方法
知识点:
1.数控机床返回参考点的工作原理 2.数控机床返回参考点的工作方式 3.加工中心返回参考点的工作过程 4.加工中心返回参考点常见故障分析
回参考点故障
图2 方式一
回参考点故障
2.方式二
回参考点前,先用手动方式以速度V1快速将轴移到 参考点附近,然后启动回参考点操作,轴便以速度V2慢 速向参考点移动。碰到参考点开关挡块后,数控系统即 开始寻找位置检测装置上的零标志。当到达零标志时, 发出与零标志脉冲相对于的栅格信号,轴即制动到速度 为零,然后再前移参考点偏移量而停止,所停位置即为 参考点。如图3所示:
4. 方式四
回参考点时,轴先以快移速度V1向参考点方向移动, 碰到参考点开关挡块后速度制动到零,再反向微动直至 脱离参考点开关挡块,然后又沿原方向微动撞上参考点 开关挡块,并且以速度V2慢速前移,到达测量系统零标 志产生栅格信号时,速度制动到零,再前移参考点偏移 量而停止于参考点。如图5所示:
回参考点故障
第二种情况:返回参考点过程有减速,但直到触及极限 开关报警而停机,没有找到参考点。
故障诊断: 没有发出零标志位信号 零标志位置失效 零标志位信号在传输或处理过程中丢失 测量系统硬件故障,不能识别 故障维修:
回参考点故障
图10 诊断维修流程图
回参考点故障
第三种情况:返回参考点过程有减速,且回 参考点的零标志位信号出现,也有制动到 零的过程,但参考点的位置不准确。
回参考点故障
任务引入:
XH713/4加工中心在返回参考点时未找到参 考点,出现超程报警,回参考点绿灯不亮,数控 系统出现“NOT READY”状态。
试从机械系统、电气系统、数控系统三个方 面对故障现象产生的原因进行全面分析,并排除 这一故障。
回参考点故障
任务分析:
手动回参考点操作是建立机床坐标系的前提, 便于编程和加工,另一方面可以消除丝杠间隙的 累计误差及丝杠螺距误差,补偿对加工的影响。 若回参考点出现故障将无法进行加工,位置不准 确将影响加工精度,甚至出现撞车事故。因此, 分析和排除回参考点故障是非常必要的。
回参考点故障
2.故障原因
(1)机床回零过程无减速动作或一直以减速回零,多数 原因为减速开关及线路故障。
(2)机床回零动作正常,而系统得不到一转信号,原因 可能是电动机编码器及线路故障或系统线路板故障。
回参考点故障
3.故障分析点
(1)检查减速挡块和减速开关的状态 (2)检查回原点的模式 (3)检查各种参数设置