各系列伺服脉冲接线图纸
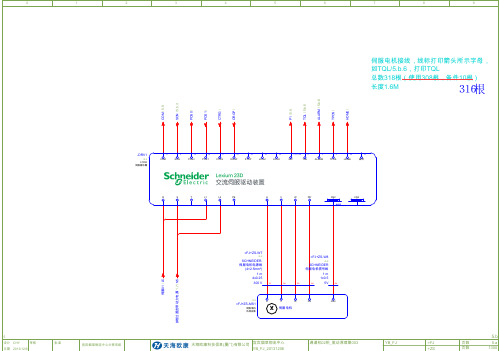
伺服接线图
=FJ+ZS-W8
/6.8
B线过渡皮带动力电源 1.7 / N5
伺服01 / L5
SCHNEIDER. 伺服电机电源线 (4×2.5mm²) 1m 4x0.25 300 V
YE
GN
RD
SCHNEIDER 伺服电机信号线 1m 1x0.5 5V BK
BK/3.5Fra bibliotekUV
W
PE
CN2
=FJ+ZS-MS1
33
32
31
30
7,5,3,1,28
6
4
2
HOME /
26
ORGP /
P1 / 5.9
CTRG /
TPOS /
POS0 /
POS1 /
27
COM
SON
POS0
POS1
CTRG
ORGP
STOP
JOGU
JOGO
24V
TQL
ALARM
TPOS
HOME
备用
R
S
T
L1
L2
PE
U
V
W
PE'
CN2
编码器
CN3
=FJ+ZS-W7
7
8
9
ALARM / 5.a.6
伺服电机接线,线标打印箭头所示, 如TQL/5.b.6,打印TQL 总数10根(使用8根,备件2根) 长度1.5M
SON / 5.a.3
TQL / 5.a.6
COM / 6.0
P1 / 6.0
JOGU /
JOGD /
SPD0 /
SPD1 /
8根
-DRV2
埃斯顿伺服参数及IO接线

埃斯顿伺服参数及IO接线一、速度模式(内部接点)1、IO接线CN1-13——24VDC+CN1-14——/S-ON 伺服ON 输入CN1-15——/P-CON 零钳位CN1-41——/P-CL 内部速度选择输入CN1-42——/N-CL 内部速度选择输入CN1-9——/S-RDY 伺服准备就绪输出/P-CON /P-CL /N-CL 运行速度0 0 0 00 0 1 speed10 1 0 speed20 1 1 speed31 0 0 speed41 0 1 speed51 1 0 speed61 1 1 speed72、参数设置Pn000.0——0 外部伺服ON 需重启Pn005.1——3 控制方式:内部速度控制(接点)需重启Pn316——内部设定速度1Pn317——内部设定速度2Pn318——内部设定速度3Pn319——内部设定速度4Pn320——内部设定速度5Pn321——内部设定速度6Pn322——内部设定速度7Pn306——加速时间二、位置模式(内部接点)1、IO接线CN1-13——24VDC+CN1-14——/S-ON 伺服ON 输入CN1-9——/S-RDY 伺服准备就绪输出CN1-11——/COIN 定位完成输出2、参数设置Pn000.0——0 外部伺服ON 需重启Pn201——电子齿轮比分子需重启Pn202——电子齿轮比分母需重启Pn005.1——C 控制方式:内部位置控制(接点)需重启Pn600——×10000脉冲Pn601——×1脉冲Pn632——点位速度控制1Pn684——0 选择点位控制的终点三、位置模式(脉冲列指令)1、IO接线CN1-13——24VDC+CN1-14——/S-ON 伺服ON 输入CN1-31——/PULS 指令脉冲输入CN1-32——/SIGN 指令符号输入CN1-34——24VDC+ 集电极开路电源输入CN1-9——/S-RDY 伺服准备就绪输出CN1-11——/COIN 定位完成输出2、参数设置Pn000.0——0 外部伺服ON 需重启Pn201——电子齿轮比分子需重启Pn202——电子齿轮比分母需重启Pn005.1——1 控制方式:位置控制(脉冲列指令)需重启Pn004.2——0 符号+脉冲指令四、辅助参数Fn001 恢复出厂值伺服OFF时可设Fn002 点动(JOG)。
EC2000伺服驱动器接线图与选型
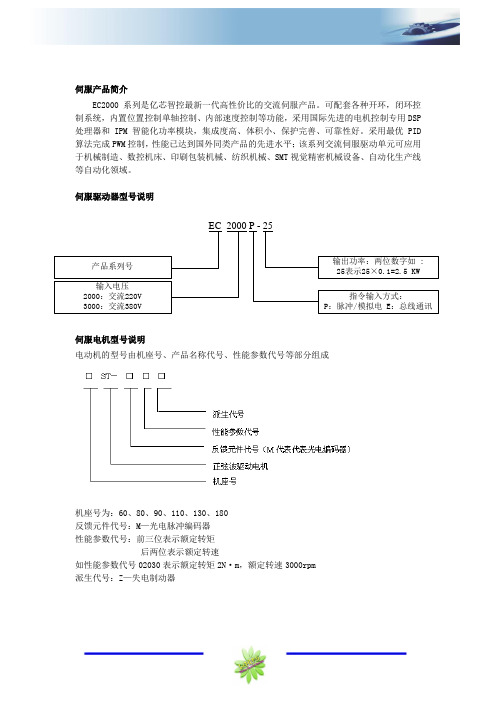
伺服产品简介EC2000系列是亿芯智控最新一代高性价比的交流伺服产品。
可配套各种开环,闭环控制系统,内置位置控制单轴控制、内部速度控制等功能,采用国际先进的电机控制专用DSP 处理器和IPM 智能化功率模块,集成度高、体积小、保护完善、可靠性好。
采用最优PID 算法完成PWM 控制,性能已达到国外同类产品的先进水平;该系列交流伺服驱动单元可应用于机械制造、数控机床、印刷包装机械、纺织机械、SMT 视觉精密机械设备、自动化生产线等自动化领域。
伺服驱动器型号说明伺服电机型号说明电动机的型号由机座号、产品名称代号、性能参数代号等部分组成机座号为:60、80、90、110、130、180 反馈元件代号:M —光电脉冲编码器 性能参数代号:前三位表示额定转矩后两位表示额定转速如性能参数代号02030表示额定转矩2N·m,额定转速3000rpm 派生代号:Z —失电制动器EC 2000 P - 25输出功率:两位数字如 : 25表示25×0.1=2.5 KW 输入电压2000:交流220V 3000:交流380V产品系列号指令输入方式:P :脉冲/模拟电 E :总线通讯伺服驱动器与伺服电机匹配参照表伺服驱动器伺服电机型号功率驱动器型号0.2Kw EC2000P-02 60ST-M006300.4Kw EC2000P-04 60ST-M013300.6Kw EC2000P-06 60ST-M019300.75Kw EC2000P-07 80ST-M024301.0Kw EC2000P -10 80ST-M040250.75Kw EC2000P -07 90ST-M024300.6Kw EC2000P -06 110ST-M020301.2Kw EC2000P -12 110ST-M040301.5Kw EC2000P-15 110ST-M050301.8Kw EC2000P-18 110ST-M060301.2Kw EC2000P-12 110ST-M060200.8Kw EC2000P-08 110ST-M040201.0Kw EC2000P-10 130ST-M040251.3Kw EC2000P-13 130ST-M050251.5Kw EC2000P-15 130ST-M060252.0Kw EC2000P-20 130ST-M077251.5Kw EC2000P-15 130ST-M100152.6Kw EC2000P-26 130ST-M100262.3Kw EC2000P-23 130ST-M150153.8Kw EC2000P-38 130ST-M150252.7Kw EC2000P-27 180ST-M172153.0Kw EC2000P-30 180ST-M190154.5Kw EC2000P-45 180ST-M215202.9Kw EC2000P-29 180ST-M270104.5Kw EC2000P-45 180ST-M270153.7Kw EC2000P-37 180ST-M350105.5Kw EC2000P-55 180ST-M350157.5Kw EC2000P-75 180ST-M48015 备注:伺服驱动器型号较多,需针对具体电机型号来配置,请联系我们技术部伺服驱动器性能指标适配电机容量0.1~7.5 KW输入电源主回路单相或三相 AC 220(-15%~+10%)V 50 Hz /60Hz 开关电源回路单相 AC 220(-15%~+10%)V 50 Hz /60Hz控制方式三相全波整流 IGBT PWM正弦波驱动使用环境温度工作温度: 0℃~+80℃ 存贮温度:-40℃~+80℃湿度小于90%(无结露)耐振动/耐冲击小于0.5G(4.9m/S2)/10~60 Hz(非连续运行)控制特性速度频率响应<=400Hz速度波动率0~100%负载:±0.01﹪额定电压±10%:±0.01﹪调速比1: 30000脉冲频率<5MHz速度控制加减速时间0~10s外部速度指令输入±10V 输入电压内部速度设定功能可内部设定7种速度输入阻抗20KΩ位置控制反馈脉冲2500线/转输入脉冲种类方向+脉冲;正负极性脉冲输入脉冲形式 1 差分输入; 2 集电极开路输入内部位置控制具有单轴功能,可以实现8段位置定位,速度、加减速时间及定时器可调电子齿轮比1< α/β <32767位置信号输出 1 A相,B相,Z相差分输出; 2 集电极开路输出Z相I/O 信号控制输入信号启动、报警清除、增益切换、脉冲清除、零速钳制、命令输入反向控制、扭矩限制、速度限制、速度命令选择、紧急停止、正转/反转禁止极限、正/反向运转扭矩限制、正转/反转寸动输入、电子齿轮比分子选择、脉冲输入禁止控制输出信号①伺服准备好输出;②伺服报警输出;③定位完成输出/速度到达输出;④抱闸输出IO引脚多功能规划可以根据参数规划输入/输出引脚功能内部功能通信功能RS-232、RJ-485通信再生制动内置保护功能超速、主电源过压、功率模块故障、欠压、过流、过载、过热、制动异常、编码器异常、电机型号设定无效、控制电源异常、位置超差等监视功能电机转速、当前位置脉冲数、位置指令脉冲数、位置偏差、电机转矩、电机电流、直线速度、转子绝对位置、指令脉冲频率、运行状态、输入输出端子信号、当前给定电压等显示,操作5位LED数码管、4个按键适用负载惯量小于电机惯量的5倍伺服电气接线图R S T TS R 电源三相AC380V电源地PE U V Wr t控制电路交流接触器滤波器变压器断路器数控系统隔离(必配)(必配)(选配)(必配)380V 220Vz -+-+-+-+-+-++-+--FG++-+--+开关选择1伺服使能开关选择2开关选择0伺服紧急停止CW 转矩限制CCW 转矩限制CW 禁止CCW 禁止Z 相输出信号地Z 相输出信号速度到达信号地速度到达信号定位完成信号地定位完成信号报警输出信号地报警输出信号准备好信号地准备好信号2203115AL M-1314编码器接口(CN2)3961121710311121514101391415458131278652413142伺服电机增量式编码器V W U PE脉冲反馈A 脉冲反馈C脉冲反馈B PAOUT+CN1A 25PEPBOUT-PZOUT-PZOUT+PBOUT+B232232124PAOUT-S TR MCNFB57SONCOM+CN1433564181644DC 12-24V单相或三相 AC 220V109AL M+18111912电磁刹车信号电磁刹车信号地37 交流伺服驱动单元Z1920AGND- 速度指令(-10V~+10VDC) 速度指令地速度控制模拟电压输入接线图PEU W V 增量式编码器伺服电机2413142568712138541514913101415121131071211693编码器接口(CN2)1413AL M-1531202 交流伺服驱动单元37电磁刹车信号地电磁刹车信号12191118AL M+910单相或三相 AC 220VDC 12-24V441684163543CN1COM+SON75NFBMCR TS PAOUT-242132223BPBOUT+PZOUT+PZOUT-PBOUT-PE25A CN1PAOUT+脉冲反馈B 脉冲反馈C脉冲反馈A 开关选择2伺服使能开关选择1+--+-++FG--+-++-+-+-+-+-+-指令脉冲方向输入地指令脉冲方向输入36323834指令脉冲输入信号指令脉冲输入信号地z准备好信号准备好信号地报警输出信号报警输出信号地定位完成信号定位完成信号地速度到达信号速度到达信号地Z 相输出信号Z 相输出信号地CCW 禁止CW 禁止CCW 转矩限制CW 转矩限制伺服紧急停止开关选择0位置控制外部脉冲输入接线图0.4~1KW伺服驱动器外形尺寸1.5~3KW伺服驱动器外形尺寸3~7.5KW伺服驱动器外形尺寸电机型号180ST-M17215 180ST-M19015 180ST-M21520 180ST-M27010 额定功率(KW) 2.7 3.0 4.5 2.9额定线电220 380 220 380 220 380 220 380 压(V)额定线电流(A)10.5 6.5 12 7.5 16 9.5 12 7.5额定转速(rpm)1500 1500 2000 1000额定力矩(N.m)17.2 19 21.5 27峰值力矩(N.m)43 47 53 67反电势112 167 97 158 84 140 138 224 (V/1000r/min)力矩系1.642.65 1.58 2.5 1.34 2.26 2.253.6 数(N.m/A)转子惯3.4×10-3 3.8×10-34.7×10-3 6.1×10-3量(Kg.m2)绕组(线间)电0.7 1.47 0.4 1.15 0.24 0.71 0.48 1.37 阻(Ω)绕组(线间)电3.5 7.8 2.42 6.4 1.45 4 3.26 8.6 感(mH)电气时间常数5 5.36 5.57 6 5.6 6.79 6.27 (ms)重量(Kg)19.5 20.5 22.2 25.5电机型号180ST-M27015 180ST-M35010 180ST-M35015 180ST-M48015 额定功率(KW) 4.3 3.7 5.5 7.5额定线电220 380 220 380 220 380 220 380 压(V)额定线电流(A)16 10 16 10 19 12 32 20额定转速(rpm)1500 1000 1500 1500额定力矩(N.m)27 35 35 48峰值力矩(N.m)67 70 70 96反电势103 172 134 223 113 181 94 156 (V/1000r/min)力矩系1.692.7 2.23.5 1.84 2.9 1.5 2.4 数(N.m/A)转子惯6.1×10-38.6×10-38.6×10-39.5×10-3量(Kg.m2)绕组(线间)电0.28 0.796 0.31 0.93 0.21 0.62 0.104 0.273 阻(Ω)绕组(线间)电1.74 4.83 3.28 9.1 1.57 4 0.772.14 感(mH)电气时间常数 6.2 6 10.58 9.78 7.47 6.45 7.4 7.8重量(Kg)25.5 30.5 30.5 40电机型号130ST-M04025 130ST-M05025130ST-M06025130ST-M07725130ST-M10015130ST-M10025130ST-M15015130ST-M15025额定功率(KW) 1 1.3 1.5 2 1.5 2.6 2.3 3.8 额定线电压(V)220 220 220 220 220 220 220 220 额定线电流(A) 4 5 6 7.5 6 10 9.5 17 额定转速(rpm)2500 2500 2500 2500 1500 2500 1500 2500 额定力矩(N.m) 4 5 6 7.7 10 10 15 15 峰值力矩(N.m)12 15 18 22 25 25 30 30 反电势(V/1000r/min)-69.3 68 65 68 103 70 114 67 力矩系数(N.m/A)1 1 1 1.03 1.67 1 1.58 0.88转子惯量(Kg.m2)0.85×10-31.06×10-31.26×10-31.53×10-31.94×10-31.94×10-32.77×10-32.77×10-3绕组(线间)电阻(Ω)2.76 1.84 1.21 1.01 1.29 0.73 1.1 0.49 绕组(线间)电感(mH)6.42 4.9 3.87 2.94 5.07 2.45 4.45 1.68 电气时间常数(ms)2.893.19 3.26 3.8 3.93 3.644.45 4.02 重量(Kg)7.7 8.2 8.9 10 11.5 11.5 14.4 14..4电机型号110ST-M02030110ST-M04030110ST-M05030110ST-M06020110ST-M06030110ST-M04020额定功率(KW)0.6 1.2 1.5 1.2 1.8 0.8 额定线电压(V)220 220 220 220 220 220 额定线电流(A)2.5 5.0 6.0 4.5 6.03.3 额定转速(rpm)3000 3000 3000 2000 3000 2000 额定力矩(N.m)2 4 5 6 6 4 峰值力矩(N.m)6 12 15 12 18 12 反电势(V/1000r/min)56 54 62 83 60 79(N.m/A)0.8 0.8 0.83 1.33 1.0 1.2转子惯量(Kg.m2)0.31×10-30.54×10-30.63×10-30.76×10-30.76×10-30.54×10-3 绕组(线间)电阻(Ω)4.02 1.09 1.03 1.46 0.81 2.41绕组(线间)电感(mH)8.48 3.3 3.43 4.7 2.59 7.3电气时间常数(ms)2.13.0 3.33 3.2 3.2 3重量(Kg) 4.5 5.5 5.5 6.1 6.7 6.7电机型号90ST-M024290ST-M0243090ST-M0352080ST-M0243080ST-M0402560ST-M0063060ST-M0133060ST-M01930额定功率(KW)0.5 0.75 0.75 0.75 1.0 0.2 0.4 0.6 额定线电压(V)220 220 220 220 220 220 220 112 额定线电流(A) 2.0 2.8 3.0 3.0 4.4 1.2 2.8 3.734 额定转速(rpm)2000 3000 2000 3000 2500 3000 3000 3000 额定力矩(N.m) 2.4 2.4 3.5 2.39 4 0.637 1.27 1.91 峰值力矩(N.m)7.1 7.1 10.5 7.1 12 1.911 3.8 5.73 反电势(V/1000r/min)67 44 67 44 56 0.411 0.411 0.411力矩系数(N.m/A)1.2 1.0 1.2 0.8 0.9 0.5 0.5 0.5转子惯量(Kg.m2)2.45×10-42.45×10-43.4×10-42.4×10-43.5×10-40.17×10-40.3×10-440.438×10-4绕组(线间)电阻(Ω)5.99 3.5 4.06 2.88 1.83 11.6 5.83 3.49 绕组(线间)电感(mH)11.8 7.2 9.7 6.4 4.72 22 12.23 8.47 电气时间常数(ms)1.972.06 2.39 2.22 2.58 1.9 2.1 2.4 重量(Kg)7.73.84.13 2.86 3.8 1.11 1.33 1.78 编码器线数(PPR)2500电机绝缘等级Class F(155℃)防护等级IP65使用环境环境温度:-20℃~+50℃环境湿度:相对湿度<90%(不结霜条件)电机绕组插座绕组引线U V W PE 插座编号2 3 4 1编码器插座信号引线5VVA+ B+Z+A-B-Z-U+V+W+U-V-W-PE 插座编号2 3 4 5 6 7 8 9 10 11 12 13 14 15 1 颜色红黑蓝绿黄蓝黑绿黑黄黑棕灰白棕黑灰黑白黑60系列伺服马达外形尺寸60系列额定转矩(N·m)0.0955 0.159 0.318 0.637 1.27 1.91 LA 85 93 113 101 122 146 LB 20 20 20 30 30 30 LC 1.5 1.5 1.5 3 3 3 LD 8 8 8 7 7 7 LE 38 38 38 50 50 50 LF 60 60 60 60 60 60 LG 66.5 66.5 66.5 70 70 70 LZ 5.5 5.5 5.5 4.5 4.5 4.5 S 8 8 8 14 14 1480系列伺服马达外形尺寸额定转矩(N·m) 1.27 2.39 3.5 4 L 123 150 178 19090 系列伺服马达外形尺寸额定转矩(N·m) 2.4 3.5 4 L 149 171 181110 、130系列伺服马达外形尺寸110系列130系列额定转矩(N·m)2 4 5 6 4 5 6 7.7 10 151500 2500 1500 2500LA 159 189 204 219 166 171 179 192 213 209 241 231 LB 55 55 55 55 57 57 57 57 57 57 LC 5 5 5 5 5 5 5 5 5 5 LD 12 12 12 12 14 14 14 14 14 14 LE 95 95 95 95 110 110 110 110 110 110 LF 110 110 110 110 130 130 130 130 130 130 LG 130 130 130 130 145 145 145 145 145 145 LZ 9 9 9 9 9 9 9 9 9 9 S 19 19 19 19 22 22 22 22 22 22180 系列伺服马达外形尺寸额定转矩(N·m)17.2 19 21.5 27 35 48 LA 226 232 243 262 292 346。
松下A5系列脉冲型接线方法
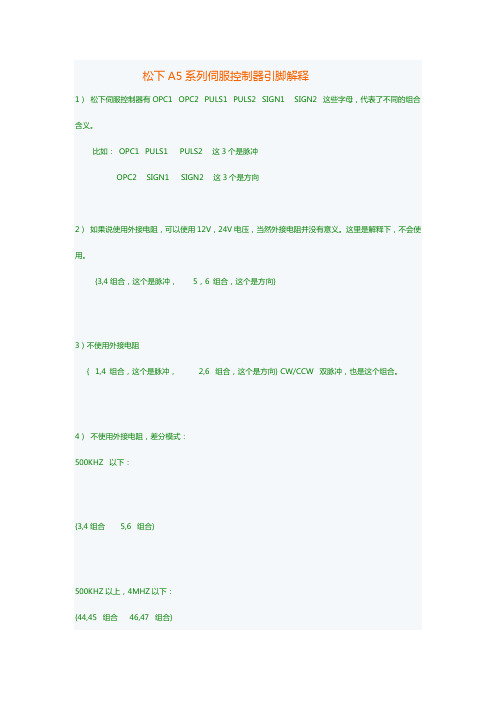
松下A5系列伺服控制器引脚解释
1)松下伺服控制器有OPC1 OPC2 PULS1 PULS2 SIGN1 SIGN2 这些字母,代表了不同的组合含义。
比如:OPC1 PULS1 PULS2 这3个是脉冲
OPC2 SIGN1 SIGN2 这3个是方向
2)如果说使用外接电阻,可以使用12V,24V电压,当然外接电阻并没有意义。
这里是解释下,不会使用。
{3,4组合,这个是脉冲,5,6 组合,这个是方向}
3)不使用外接电阻
{ 1,4 组合,这个是脉冲,2,6 组合,这个是方向} CW/CCW 双脉冲,也是这个组合。
4)不使用外接电阻,差分模式:
500KHZ 以下:
{3,4组合5,6 组合}
500KHZ以上,4MHZ以下:
{44,45 组合 46,47 组合}
5)另外牵涉到一些常闭点,是否可以不接线的问题,这个通过前面板是没法设置的,只能通过调试软件,麻烦了一点,所以,还是得接线,该接0V的,还是得接。
比如:NOT , POT。
安川5系列耐环境型伺服接线及基本参数设置说明

一、 安川5系列伺服调试如下:(1)接线说明: 1、电源线连接 单相200V 电源接线三相200V 电源接线电源端 驱动器端 电源端 驱动器端L L1 R L1N L2 S L2L3 T L3FG 外壳接地 FG 外壳接地 L L1C R L1CN L2C注意:1、SGMJV 、SGMA V 系列伺服供电电源为单相AC200V 时,电源接线时L3端子上不需接线,只需将驱动器Pn00B 参数默认0000改成0101即可;2、SGMGV 、SGMSV 系列伺服供电电源为三相AC200V 供电;3、控制电源L1C 与L2C 接AC200V 电源;4、供电电源允许偏差±10%;T L2C2、电机与驱动器连接接线图:(此部分连接线与标准型号不同) SGMJV 系列伺服接线图 (单位mm )动力线相与相、相与地之间不允许短路,如因短路造成伺服损坏,后果自负!电机侧插头端子1 U2 V3 W4 FG5 +24 接刹车6 0V编码器线(可用4×0.2带屏蔽线)电机端驱动器端1 +5V 12 0V 2 5 PS 5 6 /PS 6 外壳 FG 外壳注意:1、编码器线需带屏蔽双绞电缆线,外屏蔽与两端端子外壳需连接可靠;2、动力线电机侧4号端子,请切记连接驱动器外壳接地;3、动力线相与相、相与地线之间不允许短路,如由于用户接线错误或短路引起伺服损坏,后果自负;(2)参数设置: 1、增益参数调整设置参数No.名称 设定单位 出厂值 设定值 设定说明 Pn100 速度环增益0.1Hz 400 1000 加大数字增益增强,增益越强电机响应性越好,但增益过大电机会有震动Pn101 速度环积分时间参数0.01ms 2000 1500 减小数字增益增强,增益越强电机响应性越好,但增益过大电机会有震动 Pn102 位置环增益0.1/s 400 1000 加大数字增益增强,增益越强电机响应性越好,但增益过大电机会有震动Pn103 转动惯量比% 100 150 先使用安川调试软件进行自动整定,再进行手动微调Pn401 扭矩指令滤波器时间参数0.01ms10030 减小数字增益增强,增益越强电机响应性越好,但增益过大电机会有震动1、将Pn170第0位设置为0,使免调整功能无效;2、使用安川调试软件进行转动惯量及增益自整定;3、手动进行在线增益微调2、位置控制模式参数设置参数No.名称 设定单位 出厂值 设定值 设定说明 Pn000功能选择 ——00000010位置控制(脉冲序列指令),正转指令时正转Pn170免调整类开关 ——14012201使免调整功能有效,根据负载大小进行参数调整Pn200位置控制指令形态选择开关 ——00000001默认是符号+脉冲,正逻辑;例上位机提供指令形态为CW+CCW,正逻辑的设置Pn20E电子齿轮比(分子) 148192设定值以13位编码器为例,即为电机编码器分辨率Pn210电子齿轮比(分母)115000设定电机转一圈所需的脉冲数Pn212编码器分频脉冲数 1P/Rev20481250设定编码器每圈脉冲数经伺服驱动器倍频反馈给上位机Pn50A输入信号选择1——21008100内部参数设置允许正转侧驱动Pn50B输入信号选择2——65436548内部参数设置允许反转侧驱动3、速度控制模式参数设置参数No.名称 设定单位 出厂值 设定值 设定说明 Pn000功能选择 ——00000000速度控制(模拟量指令)正转指令时正转Pn170免调整类开关 ——14012101使免调整功能有效,根据负载大小进行参数调整Pn212编码器分频脉冲数 1P/Rev20481250设定编码器每圈脉冲数经伺服驱动器倍频反馈给上位机Pn300速度指令输入增益 0.01v/额定转速6001000例:以指令为DC10V时,电机以额定转速运行Pn50A输入信号选择1——21008100内部参数设置允许正转侧驱动Pn50B输入信号选择2——65436548内部参数设置允许反转侧驱动4、带刹车伺服需要设置的参数:参数No.名称 设定单位 出厂值 设定值 设定说明 Pn50E输出信号选择1——32110000设置为所对应的输出信号无效Pn50F输出信号选择2——00000100例:从CN1-25、26输出端子输出制动器信号(/BK)二、 输入输出信号的连接:1、位置控制的连接示例:2、速度控制的连接示例:三、部分参数一览:。
维宏系统安川伺服电机接线定义
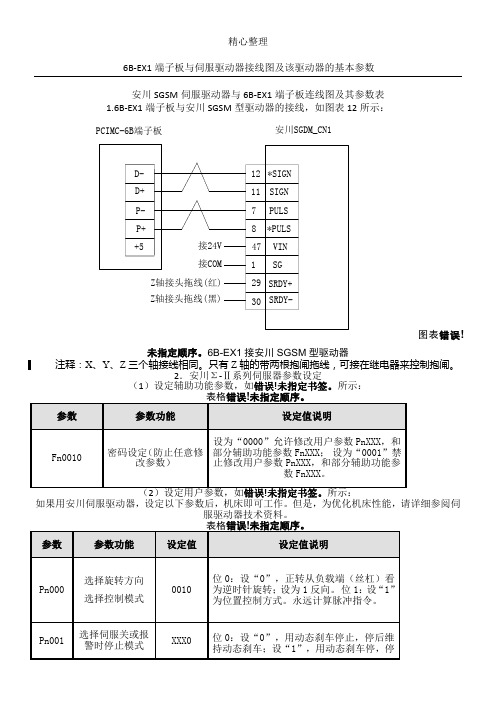
安川SGSM伺服驱动器与6B-EX1端子板连线图及其参数表
1.6B-EX1端子板与安川SGSM型驱动器的接线,如图表12所示:
图表16B-EX1接安川SGSM型驱动器
注释:X、Y、Z三个轴接线相同。只有Z轴的带两根抱闸拖线,可接在继电器来控)设定辅助功能参数,如表格1所示:
表格1
参数
参数功能
设定值说明
Fn0010
密码设定(防止任意修改参数)
设为“0000”允许修改用户参数PnXXX,和部分辅助功能参数FnXXX;
设为“0001”禁止修改用户参数PnXXX,和部分辅助功能参数FnXXX。
(2)设定用户参数,如表格2所示:
选择伺服关或报警时停止模式
XXX0
位0:设“0”,用动态刹车停止,停后维持动态刹车;设“1”,用动态刹车停,停后可自由转动;
Pn200
选择脉冲指令方式
XXX5
位0:设为“5”,选择输入指令方式为脉冲加方向、负逻辑;
Pn50A
选择功能
8170
位1:设“0”,启用/S-ON信号,从40脚输入;设为“7”伺服器永远为ON。位3:设“8”,不使用正转禁止输入信号P-OT。
Pn50B
选择功能
6548
位0:设“8”不使用反转禁止输入信号N-OT。
Pn50F
选择功能
0300
伺服电机带制动器时设置;
位2:设为“3”,从CNI-29、30输出刹车互锁信号/BK,控制刹车用的24V继电器。
Pn50E
选择功能
0000
伺服电机带刹车时设置;
四位数中不能有“3”,防止CN1-29、CN1-30脚复用为其它功能,以致刹车失效。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
.
. .
各系列伺服脉冲接线图
<1>NPN
接线方式(24V输入型):适用A,A+,AB,A2伺服。
<2>NPN
接线方式(5V输入型):适用A,A+,AB,A2伺服。
.
. .
<3>PNP
接线方式(24V输入型):适用A,A+,AB,A2伺服。
.
. .
<4>PNP
接线方式(5V输入型):适用A,A+,AB,A2伺服。
.
. .
<5>
差动接线方式:适用A,A+,AB,A2伺服。
.
. .
<6>NPN
接线方式(24V输入型):适用B2伺服。
.
. .
<7>NPN
接线方式(5V输入型):适用B2伺服。
.
. .
<8>PNP接线方式(24V输入型):适用B2伺服。
.
. .
<9>PNP
接线方式(5V输入型):适用B2伺服。
.
. .
<10>
差动接线方式:适用B2伺服。
.
. .
注:上图唯有
<1>为详细画法,其余均为省略画法,由此可参考<1>.