基于遗传算法的伺服系统静态摩擦辨识01
基于同步电机的交流伺服系统的研究
j d { q =
,
l A
— —
{ = c f { T t B f c
( 3 式 )
流 实现无级调速 。但是直流 电机存在结构复杂,造价 昂贵 ,
机械换 向器与 电刷之 间存在换 向火花等 问题 , 将逐渐被交流
电机所替代 。随着 电力 电子学 、微 电子技术 、现代控制理论 和 计算机技术 的发展 , 越来越多的学者提 出了各种 动态性能
其 逆矩 阵通 过 Cak 变 换 与 pr 换 叠 加 构 成 : l e r a k变
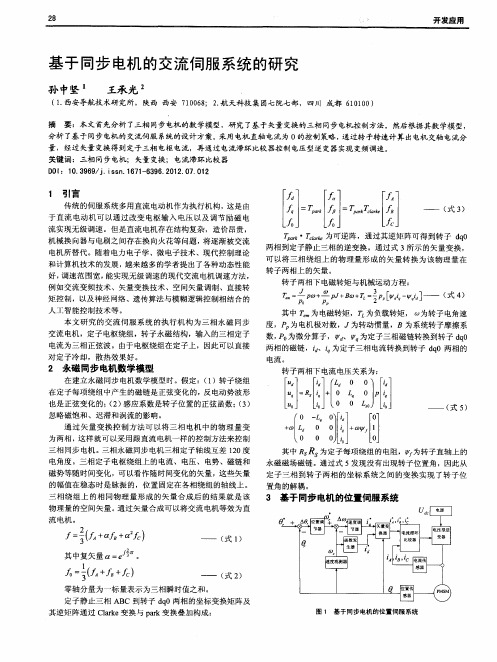
图 1 基于 同步 电机的位 置 伺服 系统
中国西部科技
21 0 2年 0 7月第 1 1卷第 0 7期总第 2 6期 7
采 用如 图 2所 示速 度观 测 器 , 以得到 电机 转速 的估计 值 。 可
根 据 转 子 速 度 计 算 出转 子 两 相 下 的直 轴 电流 的控 制 量 , 通过 ・ r 的逆 矩 阵计 算 出定 子 三 相 的 电枢 电流 的控 k e 制 量 ,控 制 三 相 逆 变 器 的各 相 导通 时 间产 生 S WM 波 形 , P
控制定子三相 电枢 电流从而实现 同步电机 的变频调速 。
3 基于同步电机 的位置伺服系统
厂丢 + + 厂 =( c )
其中复矢量 :P 。
f= + 厂) o ( + c
—— ( ) 式2
零 轴 分 量 为 一 标 量 表 示 为 三相 瞬 时值 之 和 。
定子静止三相 AB C到转子 d O两相 的坐标变换矩阵及 q
r 0
p c o
r P
+o : B+
‘
一 ] —— ( ) 式4
其中 度,
射电望远镜伺服系统的参数辨识与模型降阶

射电望远镜伺服系统的参数辨识与模型降阶
杨垒;刘志勇;王娜;李宁
【期刊名称】《新疆大学学报:自然科学版(中英文)》
【年(卷),期】2022(39)3
【摘要】应用基于系统模型的控制算法能够提高射电望远镜的指向精度和跟踪性能.因此,采用一种由相关分析法和特征系统实现算法组成的辨识方法来获得射电望远镜的参数模型.首先利用相关分析法对伪随机序列(PRBS)的特性进行分析,得到了系统的脉冲响应序列,依据由脉冲响应序列组成的Hankel矩阵的奇异值大小得到系统的模型阶次,并采用特征系统实现算法对Hankel矩阵进行转换,得到系统的参数模型.在保留系统主要动态特性的基础上,运用模型降阶技术对所得的传递函数进行降阶,得到一个低阶模型.最后以南山26米射电望远镜为平台进行模型辨识实验.实验结果表明:相对于子空间辨识方法,由本文提出的辨识方法得到的系统模型能够准确地描述26米射电望远镜的动态特性.
【总页数】8页(P306-313)
【作者】杨垒;刘志勇;王娜;李宁
【作者单位】中国科学院新疆天文台;中国科学院大学
【正文语种】中文
【中图分类】P111.44;TP273
【相关文献】
1.带离线参数辨识的降阶观测器PMSM无位置传感器控制
2.异步电机参数的降阶模型辨识
3.基于遗传算法的二自由度液压伺服系统模型降阶方法的研究
4.人体头部过载模型阶次的辨识与降阶研究
5.基于遗传算法的二自由度液压伺服系统模型降阶方法的研究
因版权原因,仅展示原文概要,查看原文内容请购买。
基于多目标遗传算法的永磁环形力矩电机H∞速度控制
电机系统节能基于多目标遗传算法的永磁环形力矩电机H∞速度控制孙宜标赵岩王成元(沈阳工业大学电气工程学院,沈阳110178)摘要数控转台用永磁环形力矩电动机回转送避系统采用畿接驱动技术喾,对负载扰动和参数爱讫更荛敏感,使系统盼伺服性能大大降低。
采用多蓄标遗传算法设计瓤速度控制器,对H。
速度控制器参数优化选取,与传统H。
速度控制相比,该控制方法可以有效地抑制负载扰动和参数变化对数控转台伺服系统的影响,使系统具有更强的鲁棒性,并获得良好的跟踪响应。
仿真结果袭躜,巍提出酶多嚣标遗传算法H。
速度控制使数控转套强转送进系统对负载抗动及参数变化具有更强的鲁棒性和快速幢。
关键词:赢接驱动;永磁环形力矩电机;多目标遗传算法;H。
速度控制凰Speed C ont r ol f or Pe r m a nent M a gne t R i ng T or que M ot or B as e d O i lM ul t i-obj ec t i ve G enet i c A l gor i t hm sSun Y i bi a o Z ha o Y an W a ng C he ngyu an(El e ct ri c E ngi neer i ng I ns t i t u t e of S h enya ng U ni ve r si t y of Techn ol og y,Sh enya ng110178)A bs t r act D ur i ng t o ado pt di r ec t dri ve t echnol o gy,p er m anent—m agn et r i ng t or que m ot or r ot a r yf eedi ng Sys t em us ed i n N C r ot ar y t a bl e is m or e se nsi t i ve t o l oad di s t urba nc es and param et er s var i at i ons.w hi ch gr ea t l y r educes s er v o per f or m ances of t he syst em。
电液伺服系统的自适应滑模控制研究
Abstract: For the chattering problem of sliding mode control (SMC) method, an adaptive SMC for electro-hydraulic servo system (EHSS) is presented. Factors causing system chattering are summarized for the uncertainties of EHSS. The corresponding control law and adaptive law are designed. Simulation results show that the proposed adaptive SMC for EHSS can effectively weaken the system chattering in comparison to the conventional SMC. Key words: control system emulation technique; electro-hydraulic servo system; sliding mode control; adaptive control
图1 Fig. 1
电液伺服系统示意图
Diagram of electro-hydraulic servo system
在活塞上的力的平衡,导致以下运动方程:
Fg = A1P 1 − A2 P 2 = Mt
d2 y dy + Bt + Ks y + FL, 2 dt dt
( 1)
其中, Fg 为活塞产生的力; P 1和 P 2 为气缸两室的压力; A 1 和 A2 为这两个室的阀芯面积; M t 为活塞和活 塞负荷的总质量; Bt 为活塞和负载的黏性阻尼系数; Ks 为负载弹簧常数; y 为活塞位移; FL 为任意负 载力。 定义负载压降 PL = P 1−P 2 ,并考虑到气缸是对称缸, Ap = A 1 = A2 ,式( 1)可写为
永磁同步电机参数辨识方法
永磁同步电机参数辨识方法作者:吴茂刚吴清华来源:《中国科技博览》2016年第30期[摘要]常规的永磁同步电机参数辨识方法往往忽略逆变器死区等非线性因素,影响了参数辨识的精度。
为提高电机参数辨识的精度,本文采用无死区逆变器电路辨识电机定子电阻和直轴电感,采用常规有死区逆变器电路辨识交轴电感,采用基于最小二乘的线性回归法消除逆变器死区等非线性因素的影响,从而提高交轴电感的辨识精度。
实验结果表明,辨识值接近真实值,证明了方法的有效性。
[关键词]永磁同步电机电阻电感辨识中图分类号:TM351 文献标识码:A 文章编号:1009-914X(2016)30-0387-020 引言永磁同步电机(permanent magnet synchronous motor,PMSM)广泛应用于要求有良好静态性能和高动态响应的伺服系统中,高性能永磁同步电机矢量控制系统需要准确的电机参数[1],如电流环参数整定、最大转矩电流比控制、弱磁控制和电流解耦控制等。
参数辨识方法分为静态参数辨识和动态参数辨识,区别是电机运行状态不同,静态参数辨识方法相对简单、适合工程化应用,动态参数辨识方法相对复杂,辨识精度也往往受到局限。
目前研究的参数辨识方法主要有:最小二乘法[2]、扩展Kalman滤波法[3]、模型参考自适应法[4]、人工智能方法(神经网络[5]、模糊系统[6]、遗传算法[7]等)。
本文主要解决静态参数辨识中逆变器死区等非线性因素对辨识精度的影响,而在常规辨识方法中往往会忽略该因素的影响。
常规辨识方法采用直流实验法定子相电阻。
方法是施加直轴电压矢量,待电机定子电流进入稳态,由直轴电压与直轴电流比值计算定子电阻。
因逆变器死区等非线性因素,实际电压小于给定电压,因而计算值偏大。
常规辨识方法采用直流衰减法辨识定子直轴电感。
基本原理是通过特定的回路连接对电机加入直流电压激励,然后记录电流通过电阻的衰减曲线完成对电机参数的辨识。
不足之处是,对于测试电路有特定的要求,有时候还需要接入特定的测量仪器来辅助完成测试。
一种基于pdff的交流伺服驱动器控制参数自整定方法

一种基于pdff的交流伺服驱动器控制参数自整定方法一种基于PDFF的交流伺服驱动器控制参数自整定方法伺服驱动器是现代工业生产中不可或缺的设备之一,其控制参数的调整对于设备的稳定性和性能有着至关重要的作用。
针对现有控制参数调整不够具有实用性和高可靠性的情况,研究者提出了一种基于PDFF的自整定方法。
以下是该方法的具体内容:1. 系统建模首先,需要对交流伺服驱动器系统进行建模。
通过采集系统的调试数据和外部输入信号,利用PDFF(模糊神经网络和最小二乘法结合的PID控制器)对系统进行建模。
通过该模型,可以计算出系统的动态响应和实际输出值,并将其与期望输出进行对比,从而得到系统的误差信号。
2. 参数设计在建立系统模型的基础上,需要对系统控制参数进行设计。
基于“模型-参考模型”的控制思想,将期望输出值作为参考模型,对系统的控制参数进行设计。
通过对参考模型与实际动态响应的对比,确定系统的比例系数、积分系数、微分系数等参数的初值。
3. 目标函数优化在初值确定后,通过目标函数优化的方法对系统的控制参数进行自适应调整,从而实现系统的自整定。
目标函数优化的方法可以采用基于模拟退火、遗传算法等计算智能算法来实现。
4. 控制器输出最后,经过自整定后的控制器对系统进行实验,观察系统的状态响应。
通过实验数据的采集与处理,如果发现系统的状态响应符合预期,则说明自整定后的控制参数具有一定的适应性,可以用于实际控制中。
综上所述,基于PDFF的交流伺服驱动器控制参数自整定方法具有优秀的适应性和高可靠性,可以对系统的控制参数进行高效、精确的自适应调整,从而提高整个系统的稳定性和性能。
该方法对于现代工业生产中伺服驱动器的控制方案研究和实际生产应用具有重要的意义和价值。
【国家自然科学基金】_永磁直线伺服系统_基金支持热词逐年推荐_【万方软件创新助手】_20140802
科研热词 遗传算法 永磁直线同步电动机 h∞控制 龙门移动式数控机床 鲁棒控制 鲁棒性 零相位误差跟踪控制 闭环系统 重复控制 跟踪性 自适应控制 线性矩阵不等式 端部效应 直线电机 直线电动机 滑模控制 永磁直线伺服系统 永磁同步直线电动机 模糊控制 最优预见前馈补偿 径向基甬数神经网络 定量反馈理论 复合控制 周期性扰动 同步传动 双模控制 加权函数 位置伺服 交叉耦合补偿 不确定性 pdff控制
科研热词 永磁直线同步电动机 重复控制 端部效应 直接驱动 周期性扰动 永磁直线同步电机 pdff控制 鲁棒性 鲁棒 非线性辩识 速度跟踪 跟踪误差 跟踪性能 负载扰动 自适应模糊控制 自适应控制 自适应律 自适应反推 自构式模糊神经网络 结构奇异值 电动机参数 滑模控制 滑模变结构 模糊控制 时变周期信号 摩擦补偿 域转换 反推 参数辨识 位置控制 lyapunov稳定性 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
2013年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
推荐指数 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2011年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
机器人视觉伺服控制研究进展与挑战
!第"#卷第$期郑州大学学报!理学版"%&’("#)&($ !$#*+年,月-./012340&56278.!)9:.;<7.=>."-52.$#*+机器人视觉伺服控制研究进展与挑战杨月全*!!秦瑞康*!!李福东*!!曹志强$!!季!涛*!!张天平*!*.扬州大学信息工程学院!江苏扬州$$"##A#$.中科院自动化研究所复杂系统管理与控制国家重点实验室!北京*##*A#"摘要!针对机器人视觉伺服研究’分别从基于位置的视觉伺服)基于图像的视觉伺服)混合视觉伺服等对视觉伺服的研究进展进行了回顾.从雅可比在线估计法)雅可比自适应估计法)深度独立雅可比矩阵估计法等多方面详细分析了无标定视觉伺服.在此基础上’就视觉伺服的实时性)可靠性)多传感器融合)多任务控制)基于离散时间域及混杂系统的控制器等’对机器人视觉伺服控制所面临的挑战及进一步研究进行了分析与展望.关键词!机器人#视觉伺服#雅可比矩阵#无标定中图分类号!K L$B$(,文献标志码!M文章编号!*,?*@,+B*!$#*+"#$@##B*@#+!"#!*#(*C?#"N O.7P P2.*,?*@,+B*($#*?$$$$%引言自从机器人诞生以来’其应用之初主要在工业制造领域’后逐渐扩大至军事)航天)医疗)娱乐)生活等领域**Q++.传统的机器人控制一般使用示教再现方式’这种方法精度很高’但缺乏灵活性.后来将b b W像机用到机器人上’带有视觉功能的机器人技术成为研究热点.最初是一种$看后走%方法’该方法首先对物体进行特征提取’计算出像机坐标系下物体的位姿信息’通过正向运动学得出期望位姿#然后根据期望位姿通过解逆运动学来求解相应的期望关节向量.这种方法只能运用于静止物体’而且进度受多方面影响’如标定精度)机器人结构参数等.为了提高任务精度’*A?C年;07S97和U2&51提出了传统的视觉反馈*A+’称之为$静态边走边看%’但受当时图像处理技术发展的限制’实时性无法得到满足.*A?A年’f7’’和L9S G正式提出了$视觉伺服%的概念**#+’与传统的视觉反馈的不同之处在于图像的处理与信息的反馈是同时进行的’控制精度)灵活性以及鲁棒性都有了较大提高.结合近几年的国内外对视觉伺服控制研究情况’本文重点对机器人视觉伺服控制进展进行了回顾’对该领域研究所面临的挑战进行了分析.&%机器人视觉伺服系统自从机器人视觉伺服被提出来以后’研究人员提出了许多伺服方法和伺服结构’按不同的标准可以将其分成不同的类别.根据摄像机个数不同’可分为单目视觉系统)双目视觉系统和多目视觉系统等.根据摄像机的安装方式’可分为手眼视觉系统!1H1@72@092>"和场景视觉系统!1H1@:&@092>"等.根据输出信号的形式’可分为基于动力学的视觉伺服和基于运动学的视觉伺服.根据摄像机参数的需求情况’可分为基于标定的视觉伺服和基于无标定的视觉伺服.下面’根据反馈信息的类型’从基于位置的视觉伺服)基于图像的视觉伺服和混合视觉伺服等对国内外研究现状进行分析.&,&%基于位置的视觉伺服在基于位置的视觉伺服结构中’其初始给定信息与反馈信息都以笛卡尔空间的形式呈现.在笛卡尔空间中’将机器人末端执行器和目标物体间的相对位姿定义为伺服任务.利用所采集的图像信号得到机器人的当前位姿信息’将当前位姿与期望位姿的差值传输给视觉控制器’形成闭环反馈***Q*B+.收稿日期!$#*?@#?@$C基金项目!国家自然科学基金项目!,**?"***".作者简介!杨月全!*A?*&"’男’江苏盐城人’教授’主要从事多机器人系统研究’=@F97’(H923I H45.1>5.<2#通信作者(秦瑞康!*AA$&"’男’江苏无锡人’硕士研究生’主要从事机器人视觉伺服控制研究’=@F97’(J72S57G923IH190.21:.Copyright©博看网 . All Rights Reserved.$B郑州大学学报!理学版"第"#卷在基于位置的模型依赖视觉伺服结构中’利用扩展卡尔曼滤波器来求得相对位姿’文献**"+采用拥有1H1@72@092>N1H1@:&@092>混合配置的多像机配置’这种方法计算量小.另外’广义预测控制器**,+与自回归模型**?+等方法也可用来估计机械手的位姿.在基于位置的模型无关的视觉伺服结构中’可以通过分解机器人当前和期望图像之间的本质矩阵**++’求得旋转和平移信息’以使其完成伺服任务.利用当前图像与目标图像间的对极几何关系’文献**A+得到两幅图像间分别在位置和方向上的参数.采用基于位置的视觉伺服控制器和常规L W控制器相结合的方法’文献*$#+实现了机器人对目标运动的跟踪.针对激光焊接工业机器人运动轨迹的精度问题’文献*$*+提出一种基于视觉反馈的激光焊接机器人轨迹跟踪控制策略.针对1H1@ :&@092>单目视觉配置的目标跟踪问题’文献*$$+提出了一种利用虚拟视觉伺服算法’使得b M W模型在图像空间中的投影收敛至目标边缘’从而实现笛卡尔空间中三维目标物的精确跟踪的基于模型的三维跟踪算法.针对利用视觉引导的机器鱼水下追踪问题’文献*$C+利用基于模糊滑膜控制机器鱼到达目标水深并保持该水深的位置’利用多步骤的方法控制机器鱼的走向’并且保持快速性与准确性.由于伺服任务的精度较大程度依赖于系统标定.像机标定包括像机内参标定与像机外参标定’主要有直接线性变换)K P97两步法*$B+)张正友平面标定法*$"+)平面圆标定法*$,+)平行圆标定法*$?+等.基于标定板的传统标定方法’为了进一步改进内参标定的精度’文献*$++在传统标定方法的基础上’提出一种共面点的改进摄像机标定方法.基于张正友标定法’文献*$A+提出一种新的基于遗传算法的摄像机内参标定优化.文献*C#Q C$+分别提出一种新的标定板块及配套的)远心镜头的)基于两相同圆的标定算法.以上方法都是针对标定模板的标定方法’无法应用于无模板的场合.另外’自标定方法*CC+研究主要有直接求解g S5RR9方程法*CB+)分层逐步标定法*C"Q C,+)绝对二次曲面自标定*C?+等.为了提高外参标定的精度’文献*C++提出了一种迭代计算的方法.针对位置姿态分开标定引起的测量误差’文献*CA+提出了一种奇异值分解的方法.以上的标定方法使得像机标定的精度问题得到有效解决.在实际应用过程中’每当系统发生改变的时候都需要重新精确标定.这种伺服方法在伺服控制中计算量较大’由于机器人运动过程中可能部分或者全部不在视野之内’使得伺服任务较难以完成.&,’%基于图像的视觉伺服基于图像的视觉伺服将给定信息与反馈信息均定义在图像特征空间.通过当前图像与期望图像相关特征的比较’求出两种图像间的误差关系’并将此作为控制信号’形成闭环反馈’通过控制机器人’使其末端执行器满足当前图像与期望图像特征相等的条件以完成伺服任务.使用此种伺服结构’比较重要的一个任务就是解决图像雅可比矩阵的求解问题*B#Q B"+.求解图像雅可比矩阵也就是求解机器人末端执行器空间速度与图像特征变化率之间的变换关系.常数近似法是利用目标位姿得到的图像雅可比矩阵用于整个伺服过程’这种求解方法只能在期望位姿的小范围内完成伺服任务.文献*B*+中指出在线估计不需要三维物体模型和精确像机标定参数.直接估计法是在机器人进行伺服任务时’用辨识来直接获取图像雅可比矩阵.与基于位置的视觉伺服控制方法相比’这种伺服控制方法无须进行位姿估计’也无须对物体三维重构’复杂程度大大降低.此外’这种方法不需要精确手眼标定’因此对手眼标定误差的鲁棒性较强.但这种方法也存在一些弊端.首先’这种伺服控制方法可以确保伺服系统局部渐近稳定’但确定稳定域大小却有一定的困难*BC+.其次’其本身是在二维空间定义的’无法对三维空间的路径直接控制’此时的路径可能无法达到最优.此外’雅可比矩阵的求解过程中还存在奇异性问题和局部极小值的问题.文献*BB+指出选取C个以上的图像特征可一定程度上避免奇异性问题.&,/%混合视觉伺服无论是基于位置的视觉伺服’还是基于图像的视觉伺服’都存在各自的优缺点’因此’法国专家_9’7P等人提出了混合视觉伺服的方法*B,+.与基于图像的视觉伺服相比’混合视觉伺服可使任务空间严格收敛’与基于位置的视觉伺服相比’混合视觉伺服不需要物体的三维模型信息.在这种伺服结构中’需要提前知道机器人的期望位姿信息’由机器人当前位姿与期望位姿之间的关系可得到对应的单应性矩阵’通过这个矩阵对机器人旋转操作控制.由图像特征的变化得到平移信息’从而对机器人平移操作控制.此方法实现了对机器人平移运动和旋转运动的部分解耦’也可将其称为基于单应性矩阵的视觉伺服控制.这种方法一定程度上可解决局部极小值问题.此外’文献*B,+指出这种视觉伺服方法不存在奇异性问题.文献*B?+对像机标定和手眼像机标定的误差进行了稳定性和鲁棒性分析.但是这种混合视Copyright©博看网 . All Rights Reserved.C B!第$期杨月全#等$机器人视觉伺服控制研究进展与挑战觉伺服方法也存在不足’主要是单应性矩阵的求解问题.文献*B,+指出单应性矩阵的求解对特征点的个数有要求’单应性矩阵的求解过程耗时大’而且可能存在多解问题’另外单应性矩阵的求解过程中对图像噪声比较敏感.’%基于无标定的视觉伺服传统视觉伺服一般需要像机内外参数标定*B+Q""+’受像机畸变以及图像噪声的影响’使得标定的结果很难达到要求.鉴于基于标定的视觉伺服仍存在很多的问题’*AAB年f&P&>9等提出了无标定视觉伺服*"*+.这种方法的本质是通过求解图像雅可比矩阵设计视觉控制器’在只有粗略的像机内外参数以及粗略的机器人结构和运动参数的情况下控制机器人.无标定视觉伺服分为雅可比在线估计法)雅可比自适应法)深度独立雅可比矩阵估计法等.’,&%雅可比在线估计法该法又称为雅可比直接估计’是一种研究较为广泛的方法*",Q,?+.针对不同运行速度的系统’文献*"*+提出了静态加权E S&H>12法和指数加权递归最小二乘法的辨识方法.针对不依赖先验知识的情况’文献*"++提出了一种基于切比雪夫多项式构成成本函数的E S&H>12图像雅可比矩阵估计方法’该方法有较好的收敛速度与系统性能.为了解决大偏差对系统的影响问题’基于误差仿射模型’利用拟牛顿法估计图像雅可比矩阵’文献*"A+提出了大偏差条件下的无标定视觉伺服控制策略.针对残差项的问题’基于动态割线法获得图像雅可比矩阵’文献*,#+提出了全局f1P P792矩阵逆的W@E h D;直接估计法.针对高斯牛顿法在大残量情况时可能不收敛或不能收敛到期望值的问题’文献*,*+提出了一种采用a@_方法的无标定视觉伺服控制方法.在雅可比的求解过程中’环境噪声会对其求解造成影响’文献*,$+提出了一种基于卡尔曼滤波器的雅可比在线估计方法.针对计算雅可比伪逆矩阵引起的奇异性问题’文献*,,+提出了一种递推最小二乘法估计图像雅可比矩阵伪逆.针对视觉信息获取延时问题’文献*,?+提出了一种带有时延补偿的视觉跟踪方法.’,’%雅可比自适应估计法雅可比自适应估计法不需要任何手眼系统参数’利用各种自适应算法对手眼系统参数进行在线估计*,+Q?++.在运动学方面’基于单应性矩阵分解’文献*,++提出了一种1H1@:&@092>系统运动学自适应控制策略.利用分解单应性矩阵的方法’文献*,A+设计高增益鲁棒控制器使得旋转误差稳定’以补偿未知深度信息和像机标定内参的自适应控制器使得平移误差稳定.在动力学方面’针对深度信息不断变化目标跟踪问题’文献*?*+设计了自适应跟踪控制器.基于李雅普诺夫方法的自适应控制策略’文献*?C+对特征点的深度信息进行补偿.基于自适应控制问题’文献*?,+提出一种基于;W6分解的模型在线标定方法.在视觉跟踪方面’针对运动学和动力学参数的不确定问题’文献*??+提出了一种利用T9<GP:1RR723设计的自适应雅可比跟踪方法’设计观测器避免关节和任务空间加速度问题.在不测量图像空间速度的情况下’文献*?++提出了一种基于非线性观测器的控制方法’通过自适应控制器实现了深度信息)动力学参数以及深度无关运动模型参数的分离.’,/%深度独立雅可比矩阵估计法该法既能对未标定摄像机参数补偿’也可对未知变化运动的深度信息补偿’且对深度信息无约束*?A Q+"+.利用;’&:721@a7算法与图像误差梯度最小下降法在线估计系统未知参数信息’文献*?A+首次提出了深度独立雅可比矩阵的无标定视觉伺服控制方法.在定位方面’文献*+#+提出了一种可同时处理动力学参数)机器人几何参数以及摄像机内外参数的自适应定位方法.在动态跟踪方面’文献*+$+将基于深度独立雅可比矩阵估计法应用于1H1@:&@092>场景系统的单特征点动态轨迹跟踪问题.针对未知物体的跟踪问题’文献*+B+提出了一种利用非线性观测器’在线估计未知物体运动状态的动态视觉跟踪方法’设计了基于深度独立雅可比矩阵估计的动态跟踪器.针对系统建模偏差或者外部干扰所导致的测量误差大和关节速度无法测量的问题’在使用深度无关矩阵实现参数线性表达的基础上’文献*+"+提出了一种采用浸入与不变流形观测器对关节速度进行估计的无标定视觉伺服.’,0%其他无标定视觉伺服方法除了以上C种方法’还有其他无标定视觉伺服方法.在只知道摄像机内部粗略参数的情况下’文献*+,+ Copyright©博看网 . All Rights Reserved.B B郑州大学学报!理学版"第"#卷提出了一种采用图像特征信息和相对位姿分别作为平移运动和旋转运动反馈信号’使得定位系统渐近稳定的策略.基于自抗扰控制器’文献*+?+提出一种将图像雅可比矩阵近似误差作为扰动进行补偿和估计的无标定视觉伺服方法.由于机器人的视觉系统与机械手末端之间的关系是一个非线性时变问题’而现在的优化方法可能会导致某些情况下无解’或需要强约束条件.故也有基于智能学习方法展开的研究*++Q AC+.针对人工神经网络的结构选取问题’文献*+A+设计了基于人工神经网络的视觉跟踪控制器’完成三维目标跟踪任务.针对自由度机器人平动的视觉定位问题’文献*A*+提出了一种利用人工神经网络对全局有效的非线性视觉映射关系模型拟合的无标定视觉伺服策略.由于雅可比矩阵本质上是线性和局部的’这影响了神经网络对全局非线性输入输出关系的逼近能力.自抗扰控制器是针对不确定系统的非线性控制器*AB Q AA+.将机器人视觉与机器人末端执行器之间的未知映射关系作为未建模动态’文献*A"+利用自抗扰控制器的思想设计控制器完成伺服任务.基于耦合的自抗扰控制器思想’文献*A,+通过对系统建模的不确定性及其未知外扰进行非线性补偿’完成了相互耦合的不依赖于系统特定任务的无标定手眼协调控制器的设计.基于自抗扰控制器思想’文献*A?+通过对系统未建模动态和外部扰动的补偿’完成了不依赖于任务的无标定手眼协调控制器的设计.利用一个外部扩展状态观测器估计未建模动态和外部扰动’文献*+?+设计了基于非线性状态误差反馈的控制策略./%面临的挑战经过几十年的发展’机器人视觉伺服研究和应用取得了很大的发展和成就.但可以看出大多数的伺服算法仍有一定的局限性.为了将机器人视觉伺服系统应用于实际中’必须解决其精确度)实时性)可靠性以及鲁棒性等问题和要求’在这些方面仍面临很大挑战.第一’视觉伺服的实时性问题.视觉伺服的过程中包含图像采集)图像处理)特征提取与分析)控制信息!如位姿)深度信息等"转换生成等.无论是基于位置的视觉伺服过程中的位姿估计’还是基于图像的视觉伺服过程中的图像雅可比矩阵估计)深度信息估计等’都需要有较强的算法来提高实时性.为了拓宽伺服系统的应用领域’如何进一步改善系统的实时性仍是当前亟待深入研究的问题之一.第二’复杂动态环境下视觉伺服的可靠性问题.近年来针对视觉伺服的研究’往往将其处于理想的静态环境下’或者假设环境已知对系统约束处理’但真实环境是复杂的’多变的)未知的动态约束可能会导致机器人碰撞或者目标物遮挡#其次’在实际应用中会有图像噪声)控制延时和模型误差等问题’从而使得系统的稳定性以及动态性能受到影响.因此’针对视觉伺服可靠性’还有很多问题值得深入探索.第三’多传感器的信息融合问题.当前的研究大多是利用单一视觉传感器进行的’但其自身存在某些缺陷’如探测空间受限.在复杂的实际环境中’如何有效地使多视觉传感器的信息进行有效融合’从而提高实际控制的性能成为研究重点.第四’多任务控制问题.当前大多数的视觉伺服方法是基于单任务控制问题.但在一个实际应用中往往有多个任务’如机器人抓取系统)装配系统等’处理多任务控制问题是必不可少的.第五’基于离散时间域以及混杂系统的控制器设计问题.由于当前大多数的动态视觉伺服控制器都是基于连续时间域的机器人动力学设计的’但是实际应用多是在离散时间域或连续N离散时间域混合情形下实现的.因此’如何基于离散时间域)混杂系统的机器人运动学和动力学设计与分析’开展动态视觉伺服控制器问题变得越来越重要.0%总结本文根据反馈方式对视觉伺服分为基于位置的视觉伺服)基于图像的视觉伺服和混合视觉伺服等C类’对其控制结构)算法等进行了回顾分析.此外’特别对无标定视觉伺服进行了着重分析和小结.最后’就当前视觉伺服研究所面临的挑战进行了分析.Copyright©博看网 . All Rights Reserved."B!第$期杨月全#等$机器人视觉伺服控制研究进展与挑战参考文献!**+!g f6V;f U W-’f c)DEV._7’7:9S H S&T&:P@93’7F RP1[S&F:&>9H92>:&F&S S&\*b+N N L S&<11>723P&[:01+:0U2:1S29:7&29’b&2@ [1S12<1&2b&2:S&’’M5:&F9:7&2’V&T&:7<P92>%7P7&2.g52F723’$##B(??*Q.*$+!_U a a;;’M c6h)’_=-U M;a.U F931T9P1>87P59’P1S8&<&2:S&’[&S[7j1>\7236M%P:S9<G723’7219S72[S9P:S5<:5S172\72> *b+N N L S&<11>723P&[$#*C U===U2:1S29:7&29’b&2[1S12<1&2V&T&:7<P92>M5:&F9:7&2!U b V M".g9S’P S501’$#*C("?,A Q "??B.*C+!a6cVb’b f=)bK’L6e-.U2:1S21:T9P1>S1F&:1P5R1S87P&S H P H P:1F[&S K1’1@F1>7<721S&T&:9RR’7<9:7&2*b+N N L S&<11>723P &[U===^&S GP0&R&2M>892<1>V&T&:7<P92>7:P;&<79’U F R9<:P.6;M(U===b&F R5:1S;&<71:H’$##A(*"C Q*"+.*B+!U;f U W MK’g6V c g U e._&:7&292>S19’@\&S’>P12P723P H P:1F&[9P F9’’T7R1>12:1S:972F12:S&T&:*-+.L S&<11>723P&[:01 \&S’><&23S1P P&272:1’’7312:<&2:S&’o95:&F9:7&2’$##B’,!*#"(B+CB Q B+CA.*"+!赵清杰’连广宇’孙增圻.机器人视觉伺服综述*-+.控制与决策’$##*’*,!,"(+BA Q+"C.*,+!方勇纯.机器人视觉伺服研究综述*-+.智能系统学报’$##+’C!$"(*#A Q**B.*?+!黎志刚’段锁林’赵建英’等.机器人视觉伺服控制及应用研究的现状*-+.太原科技大学学报’$##?’$+!*"($B Q C*.*++!贾丙西’刘山’张凯祥’等.机器人视觉伺服研究进展(视觉系统与控制策略*-+.自动化学报’$#*"’B*!""(+,*Q +?C.*A+!;f U V M U e’U)c6=f.D57>7239S&T&:TH87P59’[11>T9<G729P P1F T’723:9P GP*-+.L9::1S2S1<&327:7&2’*A?C’"!$"(AA Q *#,.**#+f U a a-’L M V g^K.V19’:7F1<&2:S&’&[9S&T&:\7:09F&T7’1<9F1S9*b+N N L S&<11>723P&[72:1S F9:7&29’P H F R&P75F&272>5P@ :S79’S&T&:P.^9P0723:&2(Wb’*A?A($CC Q$B,.***+K M e a c VD’g a==_M)a.f H TS7>R&P7:7&2@T9P1>87P59’P1S8&723\7:0&2’721<9’7TS9:7&2[&S905F92&7>S&T&:*b+N N L S&<11>@ 723P&[:01U===N V;-U2:1S29:7&29’b&2[1S12<1&2U2:1’’7312:V&T&:P92>;H P:1F P.-9R92(;12>97’$##B(,+,Q,A*.**$+D M);)V’W M)U ML’W U i c)^=.%7P59’P1S8&723:&929S T7:S9S H R&P1\7:0S1P R1<::&92&TO1<:378129P723’1G2&\2’123:0 *b+N N L S&<11>723P&[:01M F1S7<92b&2:S&’b&2[1S12<1.^9P0723:&2’$##+(*$,*Q*$,?.**C+董鹏飞.基于位置的工业机器人视觉伺服控制系统研究*W+.广州(华南理工大学’$#*".**B+李国栋’田国会’薛英花.基于‘V b&>1技术的家庭服务机器人视觉伺服抓取操作研究*-+.东南大学学报!自然科学版"’$#*#’B#!;*"(C#Q C,.**"+a U L L U=a a c%’;U b U a U M)c E’%U a a M)U a.=H1@72@092>N1H1@:&@092>F5’:7@<9F1S987P59’P1S8&723*b+N N L S&<11>723P&[:01 BB:0U===b&2[1S12<1&2W1<7P7&292>b&2:S&’.;187’’1’$##"("C"B Q"C"A.**,+g c U%cM-’f c6;f M)D U).V19’@:7F187P7&2[11>T9<G[&S P1S8&723S&T&:7<F927R5’9:&S\7:0P1’[@:52723<&2:S&’’1S*-+.U=== :S92P9<:7&2P&2P H P:1F P F9292><H T1S21:7<P’*AA*’$*!*"(*CB Q*B$.**?+^=;K_c V=WE’^U a;c)^-.W7S1<:>H29F7<<&2:S&’&[9S&T&:5P7239212>@R&72:F&52:1><9F1S992>g9’F92[7’:1S R&P7@ :7&21P:7F9:7&2*b+N N L S&<11>723P&[:01U===U2:1S29:7&29’b&2[1S12<1&2V&T&:7<P92>M5:&F9:7&2.;9<S9F12:&’b M’*AA*( $C?,Q$C+B.**++D=c V D U=%Df’V M W6a c%%W.MRS9<:7<9’F1:0&>[&S>1<&F R&P7:7&2&[:011P P12:79’F9:S7j*-+.M RR’71>F9:01F9:7<9’P<7@ 12<1P’$#*B’+!*?,"(+?""Q+??#.**A+E M;V U V’V U%a U)=’;f U_;f c)U U.%7P59’0&F723(;5S[723&2:011R7R&’1P*-+.U2:1S29:7&29’O&5S29’&[<&F R5:1S87P7&2’*AAA’CC!$"(**?Q*C?.*$#+赵艳花’卢秉娟.基于位置的机器人视觉伺服控制*-+.洛阳理工学院学报!自然科学版"’$##+’*+!$"(??Q?A.*$*+张文增’陈强’都东’等.基于三维视觉的焊接机器人轨迹跟踪*-+.清华大学学报!自然科学版"’$##?’B?!+"(*$?#Q *$?C.*$$+张鹏程’徐德.基于b M W模型的目标跟踪和定位算法研究*-+.高技术通讯’$#*B’$B!,"(,$C Q,C*.*$C+e6-’;6)h’i6W’1:9’.=F T1>>1>87P7&2@357>1>C@W:S9<G723<&2:S&’[&S S&T&:7<[7P0*-+.U===:S92P9<:7&2P&272>5P:S79’1’1<:S&27<P’$#*,’,C!*"(C""Q C,C.*$B+K;M U V.M81S P9:7’1<9F1S9<9’7TS9:7&2:1<027J51[&S0730@9<<5S9<H CWF9<072187P7&2F1:S&’&3H5P723&[[@:01@P01’[K%<9F1S9P92>’12P1P*-+.U===O&5S29’&2S&T&:7<P92>95:&F9:7&2’$##C’C!B"(C$C Q CBB.*$"+/f M)D/.M[’1j7T’121\:1<027J51[&S<9F1S9<9’7TS9:7&2*-+.U===:S92P9<:7&2P&2R9::1S2929’H P7P92>F9<072172:1’’7312<1’$###’$$!**"(*CC#Q*CCB.Copyright©博看网 . All Rights Reserved.,B郑州大学学报!理学版"第"#卷*$,+孟晓桥’胡占义.一种新的基于圆环点的摄像机自标定方法*-+.软件学报’$##$’*C!""(A"?Q A,".*$?+黄凤荣’胡占义’吴毅红.单幅图像测量的一种新方法*-+.自动化学报’$##B’C#!B"(B+?Q BA".*$++刘杨豪’谢林柏.基于共面点的改进摄像机标定方法研究*-+.计算机工程’$#*,’B$!+"($+A Q$AC.*$A+徐中宇’李春龙’孙秋成’等.基于遗传算法的摄像机内部参数标定优化方法*-+.吉林大学学报!理学版"’$#*B’"$ !,"(*$,?Q*$?*.*C#+文涛’左东广’李忠科’等.一种鲁棒的高精度摄像机标定方法*-+.计算机应用研究’$#*"’C$!**"(CB+A Q CBA*.*C*+李林娜’毕德学’马丽.基于有序图像序列与可控外部参数的远心镜头标定方法*-+.天津科技大学学报’$#*"’C#!B"( ,#Q,B.*C$+张虎’达飞鹏’李勤.基于两相同圆的自标定方法*-+.仪器仪表学报’$#*#’C*!C"(,*+Q,$B.*CC+孟晓桥’胡占义.摄像机自标定方法的研究与进展*-+.自动化学报’$##C’$A!*"(**#Q*$B.*CB+_M;W.M P1’[@<9’7TS9:7&2:1<027J51[&S9<:78187P7&2P H P:1F P*-+.U===:S92P9<:7&2P&2S&T&:7<P92>95:&F9:7&2’*AA,’*$ !*"(**B Q*$#.*C"+f=e W=)M’M;K V c_g.=5<’7>192S1<&2P:S5<:7&2[S&F<&2P:92:72:S72P7<R9S9F1:1S P*b+N N L S&<11>723P&[:01*C:0U2:1S29@ :7&29’b&2[1S12<1&2L9::1S2V1<&327:7&2(M5P:S79’%71229’*AA,(CCA Q CB*.*C,+L c a a=h=e;_’D c c aa%.;1’[@<9’7TS9:7&2[S&F:019TP&’5:1<&27<&2:01R’9219:72[727:H*b+N N L S&<11>723P&[:01U2:1S29@ :7&29’b&2[1S12<1&2b&F R5:1S M29’H P7P&[U F931P92>L9::1S2P.E1S’72(;RS7231S%1S’93’*AA?(*?"Q*+$.*C?+K V U D D;E.M5:&<9’7TS9:7&292>:019TP&’5:1J59>S7<*b+N N L S&<11>723P&[:01U===b&F R5:1S;&<71:H b&2[1S12<1&2b&F R5:1S %7P7&292>L9::1S2V1<&327:7&2.M S312:729(;92-592’*AA?(,#A Q,*B.*C++/f M)Df.f92>N1H1<9’7TS9:7&2[&S1’1<:S&27<9P P1F T’H S&T&:P*-+.U===K S92P9<:7&2P&2V&T&:7<P92>M5:&F9:7&2’*AA+’*B !B"(,*$Q,*,.*CA+W M)U U a U W U;g’E M e V c@b c V V c b f M)c=.K01>59’J59:1S27&29RRS&9<0:&092>@1H1<9’7TS9:7&2*b+N N L S&<11>723P&[*C:0 U2:1S29:7&29’b&2[1S12<1&2L9::1S2V1<&327:7&2.M5P:S79(%71229’*AA,(C*+Q C$$.*B#+b f M6_=K K=h’E c6g U V;’E c6K f=_eL’1:9’.;:S5<:5S1[S&F<&2:S&’’1>F&:7&2*-+.U===:S92P9<:7&2P&2R9::1S2929’H@ P7P92>F9<072172:1’’7312<1’*AA,’*+!""(BA$Q"#B.*B*+W=a6b MM’c V U c a cD’D U c V W M)cLV.c2@’7211P:7F9:7&2&[[19:5S1>1R:0[&S7F931@T9P1>87P59’P1S8&723P<01F1P*b+N N L S&<11>723P&[$##?U===U2:1S29:7&29’b&2[1S12<1&2V&T&:7<P92>M5:&F9:7&2.U:9’H(V&F1’$##?($+$C Q$+$+.*B$+L U=L_=U=V-M’_b_6V V M eD%’a U L g U)f.62<9’7TS9:1>>H29F7<87P59’P1S8&723*-+.U===:S92P9<:7&2P&2S&T&:7<P92> 95:&F9:7&2’$##B’$#!*"(*BC Q*B?.*BC+b f M6_=K K=h.L&:12:79’RS&T’1F P&[P:9T7’7:H92><&281S312<1727F931@T9P1>92>R&P7:7&2@T9P1>87P59’P1S8&723*_+.a&2@ >&2(;RS7231S a&2>&2’*AA+(,,Q?+.*BB+b f M6_=K K=h’f6K b f U);c);.%7P59’P1S8&<&2:S&’’R9S:U(T9P7<9RRS&9<01P*-+.U===S&T&:7<P92>95:&F9:7&2F939@ 4721’$##?’*C!B"(+$Q A#.*B"+_M/’;6-.V&T5P:52<9’7TS9:1>87P59’P1S8&723<&2:S&’T9P1>&2>7P:5S T92<1&TP1S81S*-+.U P9:S92P9<:7&2P’$#*"’"A(*AC Q $#B.*B,+_M a U;=’b f M6_=K K=h’E c6W=K;.$@W87P59’P1S8&723*-+.U===:S92P9<:7&2P&2S&T&:7<P92>95:&F9:7&2’*AAA’*"!$"($C+Q$"#.*B?+_M a U;=’b f M6_=K K=h.K01&S1:7<9’7F RS&81F12:P72:01P:9T7’7:H929’H P7P&[921\<’9P P&[F&>1’@[S1187P59’P1S8&723F1:0@ &>P*-+.U===:S92P9<:7&2P&2S&T&:7<P92>95:&F9:7&2’$##$’*+!$"(*?,Q*+,.*B++江祥奎’纪旭.一种摄像机标定系统的实现*-+.西安邮电大学学报’$#*"’$#!""(?*Q?".*BA+胡小平’左富勇’谢珂.微装配机器人手眼标定方法研究*-+.仪器仪表学报’$#*$’CC!?"(*"$*Q*"$,.*"#+冯春’周文.手眼系统中摄像机标定和手眼标定的同步算法*-+.机械设计与制造’$#*"!*$"("+Q,*.*"*+f c;c W Mg’M;M W M_.%1S P9:7’187P59’P1S8&723\7:0&5:G2&\’1>31&[:S51O9<&T792*b+N N L S&<11>723P&[:01U===N V;-N D U U2:1S29:7&29’b&2[1S12<1&2U2:1’’7312:V&T&:P92>;H P:1F P.D1S F92H(_527<0’*AAB(*+,Q*AC.*"$+付清山.机器人无标定视觉伺服控制研究*W+.南京(东南大学’$#**.*"C+梁新武.机械手无标定动态视觉伺服研究*W+.武汉(华中科技大学’$#**.*"B+毛尚勤.微操作系统的机器视觉与无标定视觉伺服研究*W+.武汉(华中科技大学’$#*C.*""+陶波’龚泽宇’丁汉.机器人无标定视觉伺服控制研究进展*-+.力学学报’$#*,’B+!B"(?,?Q?+C.*",+L U=L_=U=V-M’_b_6V V M eD%’a U L g U)f.K S9<G7239F&8723:9S31:\7:0F&>1’72>1R12>12:87P59’P1S8&723(9RS1>7<:781 1P:7F9:7&29RRS&9<0*b+N N L S&<11>723P&[:01U===U2:1S29:7&29’b&2[1S12<1&2V&T&:7<P92>M5:&F9:7&2.E1’375F(a15812’Copyright©博看网 . All Rights Reserved.。
双电机驱动伺服系统的控制与仿真研究
acrc n n -a igpr r ne nodrodmi s eavree et o akah an wcnrl t d cuayadat j i mm n e o f mac.I re i n ht d es f s f cls , e o t h t i h fc b o me o
精度及抗干扰能力 , 为了削弱齿隙非线性对系统产生的不利 影 响, 提出 了一种新 的控制方 法 , 采用遗 传算法 和 R F神经 网 B 络相结合。针对 R F神经网络控制器参数难 以确定的问题 , R F 经网络的隐层 中心值 和宽度进行 了优化 。 B 对 B 神 用递推最
小二乘法训练隐层和输出层之 间的权值 。最后在双电机驱动伺 服系统 中进行 了仿真 , 结果表 明系统跟踪 响应速度快 , 态 稳 精度高 , 抗干扰能力强 , 具有较高 的鲁棒性 , 证明所提出的控制策略是有效 的。 关键词 : 双电机驱动; 遗传算法 ; 神经 网络
中 图分 类 号 :P 7 T23 文 献 标 识 码 : B
S u y o n r la d Sm u a i n o a - o o ii g S r o S se t d n Co t o n i l t fDu l m t r Drvn e v y t m o
c mb n n e e i ag r h w t BF n u a ewo k wa r p s d o ii g g n t lo i m i R e r ln t r s p o o e .Ai n tt e p o lm h tn u a ew r a c t h mi g a h r b e ta e r n t o k p - l r mees a e df c h t e d tr n d,t i me h d wa s d t p i z h e tr n i t so F h d e a e , a t r r i u o b ee mie i f h s t o s u e o o t miet e c ne sa d w dh f RB i d n l y r a d r c r in la t q a e meh d w su e o tan t e weg t ew e i d n ly ra d o t u a e . F n l n e u so e s s u r t o a s d t ri h ih sb t e n h d e a e n u p tly r ia l h y,t e s lt n e p rme t i u l i a i x e i n n d a —mo o r i g s Y o s s m H WS t a h y tm a u c e p n e s e d,hs mu o trdi n ev y t v e S O h tt e s s e h s q ik r s o s p e ih
大惯量伺服系统智能PID算法研究的开题报告
大惯量伺服系统智能PID算法研究的开题报告一、选题背景和意义近年来,随着机械、电子等科学技术的快速发展,各种伺服系统得到了广泛应用。
在伺服系统中,PID算法作为一种基础控制算法,被广泛应用于伺服系统中的运动控制系统、温度控制系统及压力控制系统等领域。
然而,在一些大惯量系统中,传统的PID算法控制往往效果不佳,甚至出现系统不稳定、过渡过程时间长等问题,这是由于大惯量系统的惯性大、负载惯性大,导致系统响应时间慢,不稳定等原因。
因此,采用智能PID算法进行大惯量伺服系统控制研究,具有非常重要的意义和实际应用价值。
二、研究内容和思路本研究计划在了解大惯量系统特点的基础上,研究采用智能PID算法进行大惯量伺服系统控制的方法。
具体研究内容如下:1.基于系统模型,建立大惯量伺服系统的数学模型。
2.分析大惯量伺服系统特点,探究传统PID算法在大惯量系统控制中的不足。
3.研究智能PID算法在大惯量伺服系统控制中的应用。
4.设计智能PID算法控制器及优化控制参数,提高大惯量系统控制精度和稳定性。
5.验证智能PID算法控制方法在大惯量伺服系统中的效果和优化方案的可行性。
三、研究计划和技术路线(1)研究计划第一阶段:理论分析及文献综述(1个月)1.分析大惯量伺服系统特点及传统PID算法控制的不足。
2.对智能PID算法进行综述,包括神经网络PID算法、模糊PID算法、遗传算法PID控制器等。
第二阶段:智能PID算法在大惯量伺服系统中的应用研究(2个月)1.基于大惯量伺服系统模型,设计智能PID算法控制器及优化控制参数。
2.分析大惯量伺服系统控制实验数据,对比传统PID算法及智能PID 算法的控制效果。
第三阶段:优化方案验证及总结(1个月)1.在实际大惯量伺服系统中,验证智能PID算法控制方法的效果和优化控制参数的可行性。
2.总结研究成果及存在的问题,提出后续优化方向及建议。
(2)技术路线1.建立大惯量伺服系统的数学模型,包括系统动力学模型、控制模型等。