粤科版高中通用技术选修3-简易机器人制作:简易机器人控制电路的构建_课件1
豫科版高中通用技术选修3:简易机器人制作机器人行程控制
简易机器人上也有很多地方可以采用基于旋 转编码器的反馈控制,如机器人小车的行程,它 是通过旋转编码器检测车轮的转角实现的。
谢谢
机器人行程控制
接下来就可以借助车轮上的旋转编码器和 反馈方法来控制机器人的行程了。由于只有一 个驱动轮上安装有编码器,为简化问题,这里 将用这个编码器的反馈信号同时控制机器人的 两个驱动轮以相等的速度直线前进。图6·4是 控制系统的示意图。
图6·4简易机器人行程控制系统
机器人行程控制的程序流程如图6·5所示,对应 的C程序清单列于程序清单6·1中。这个程序并不复 杂,它定义了4个变量counter累计编码器输出的脉冲 数,V1为编码器当前状态,V2代表上一次控制器读入 的编码器状态。需要特别说明的是,变量length代表 了机器人日标行程所对应的编码器脉冲数,由于车轮 (周长155mm)每转一圈编码器输出10个脉冲,因此该 变量的初值65就代表目标行程约为1000mm。
2、观察我们前面搭建的高台灭火机器 人和巡线运球机器人,考虑是否有其他转动 关节也可以釆用旋转编码器实现反馈控制, 动手试一试。
本章小结
机器人通常对运动精度有较高的要求,因此反 馈控制是其主要的控制方式。光电旋转编码器是机 器人上经常使用的一种转轴角度反馈传感器,它由 光电传感器和随轴转动的码盘组成。本章介绍的简 易旋转编码器包括一个反射式光电传感器和一个黑 白相间的码盘,通过光电传感器对码盘上的黑白区 间计数就可以得出轴的转角。
按以上行程与脉冲数的关系,同学 们可通过更改这个变量的初值设定目标 行程的其他值。
程序首先驱动机器人直线前进,然后执行for循 环不断读取编码器的状态(假设编码器接入通道1), 若两次采样的状态发生了变化(V1≠V2),说明编码 器转过了1个区间,则脉冲计数counter加程序再将 counter与length进行比较,如果counter达到 length的值,说明机器人的行程达到目标设定值, 则机器人停止,否则继续以原有速度前进。
粤科版高中通用技术选修3:简易机器人制作齿轮传动
讨论与分析
(四)蜗杆蜗轮传动
蜗杆蜗轮传动如图,蜗杆蜗轮的两轴在空间交错, 两轴间的夹角一般为90°。
(五)齿轮系
前面已经讨论了各种齿轮传动知直齿圆柱齿轮、圆 锥齿轮和蜗杆蜗轮传动等,它的传动形式都很简单。然 而实际的机械传动往往很复杂,在主动轴与动轴的距离 较远、要求较大传动比及多方向变换等情祝下,仅用一 对齿轮传动就蜗杆蜗轮传动是不够的,必须通过一系列 相互合的齿轮组成的传动装置将主动轴的运动传递到从 动轴。这种由一系列互相合的齿轮组成的传动装置称为 齿轮系,图所示的简易机器人中应用了齿轮系。
齿轮传动
ቤተ መጻሕፍቲ ባይዱ
一.了解齿轮传动
齿轮传动在现代机械中是应用最广泛的传动方式之 一,例如机械钟表的齿轮传动,齿轮传动的类型有很多, 在简易机器人中主要用到的有直齿面柱齿轮传动、齿条 与齿轮传动、圆锥齿轮传动和蜗杆蜗轮传动等。
(一)直齿圆柱齿轮传动
直齿圆柱齿轮传动是在两个齿轮在同一平 面上互相咬合组成。
讨论与分析
(二)齿条与齿轮的传动 齿条与齿轮传动如图所示。齿条与齿轮的
齿合能实现从转动到直线运动的转换。当固定 在转轴上的主动齿轮转动时能够移动的从动齿 条将形成直线运动,其中,从动齿条直线运动 的方向如图中箭头所示。
齿轮与齿条的运动
简易机器人的齿条与齿轮传动能通过主 动齿轮的转动来改变车轮的方向。
(三)圆锥齿轮传动
今天的学习到此结束,大家都学会了么?
谢谢
高中通用技术粤教版选修3简易机器人制作第一章《第一节二、单片机的特点和应用》优质教案省级比赛获奖教案
高中通用技术粤教版选修3简易机器人制作第一章《第一节二、单片机的特点和应用》优质课教案省级比赛获奖教案公开课教师
面试试讲教案
【名师授课教案】
1教学目标
1、知识与技能
(1)知道单片机的特点及应用;
(2)能正确地将Arduino控制板、扩展板、面包板、下载线连接好;
(3)掌握LED灯电子元件的连接;
(4)能编写简单的程序控制LED灯闪烁。
2、过程与方法
(1)利用Arduino开发系统实现广告灯效果;
(2)以小组探究方式参与互动,能提出问题,分析问题并解决问题;
(3)理解Arduino C语言编程的基础知识,为以后的arduino探究活动奠定知识基础
3、情感态度与价值观
(1)通过观察、操作等探究活动,培养学生实践能力和科学素养;
(2)培养小组合作的团队精神和乐于思考、勇于探索的科学精神;
(3)激发学生对单片机的学习兴趣。
2学情分析
高二年的学生,对于单片机还比较陌生。
基于目前高中生的知识结构水平,本节课先以一些比较有趣的单片机作品如摇摇棒、智能小车、音乐发声器等导入,逐步引导学生深入探究单片机原理和Arduino开发系统。
通过一系列的任务让学生利用Arduino开发系统实现广告灯效果。
让学生动手组装硬件和编写简单程序实现广告灯效果,使学生获得巨大的成就感,同时促进他们探究一些和生活息息相关的科学原理。
紧密联系生活实际,从学生现实生活所接触的现象向技术内容延伸,使学生从中得到感染并与之产生共鸣,从而获得积极的情感体验。
3重点难点
1、重点:(1)知道单片机的特点及应用;。
豫科版高中通用技术选修3:简易机器人制作机械系统的组成
机体的作用相当于人体的躯干,机器人的驱动 装置、传动装置、执行机构三者都要安装在机体上。 机体要有足够的强度,以保证机器人在实现各项功 能时足够坚固,其作用类似于自行车的车架,汽车 的底盘等。
综上所述,在机器人的机械系统中,传动装置起着 非常重要的作用,它把驱动装置输出的单一运动形式变 化成多种运动方式,满足不同执行机构的要求。机器人 中传动装置最为复杂,也最富有创意,因此本章重点介 绍各种机械传动的方式。
机械系统的组成
学习导航 1、机器人机械系统由哪几部分组成? 2、常见的机械传动方式有哪些?
在第一章中我们提出了一种高台灭火机器人 的设计方案。为了解释简易机器人机械系统的组 成,图4·1给出了一个灭火机器人机械系统具体 结构的示例,它由驱动装置、传动装置、执行机 构和机体4部分组成。这与实用机器人的机械系 统组成是一致的。
图4·1灭火机器人结构举例
人体运动的动力来自于肌肉的伸缩,汽车开动需要 发动机,遥控玩具车则通常需要电机驱动。机器人与任 何机械一样,也有赖于驱动装置来产生运动,完成各种 动作。图4·1中简易机器人的驱动装置是微型电机,图 4·2中家庭服务机器人采用气动人工肌肉作为驱动装置。 机器人的驱动装置还包括汽缸、液压缸等。
谢谢
执行机构是用来完成特定作业任务的装置。例如,机床 的刀具用于对毛坯进行切削加工,自行车的轮子和车把分别 实现滚动前行和转向,消防车的高压水枪则扮演灭火的角色 等。显然,机器人应该借助不同的执行机构去完成不同的作 业任务,焊接机器人的执行机构是焊枪,喷涂机器人的执行 机构是喷枪,清洁机器人的执行机构是清水喷淋头和刷子, 而灭火和巡线运球机器人的执行机构分别为风扇和手爪。图 4·4中机器人的执行机构(手爪)正在抓握一个鸡蛋。
简易机器人制作方法
简易机器人制作方法
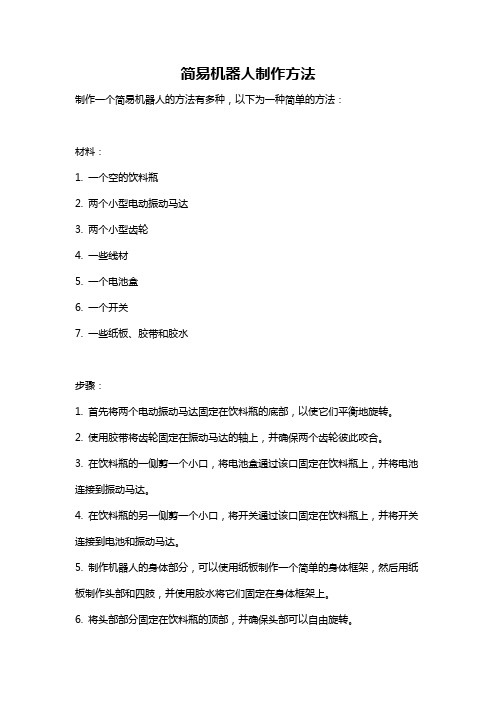
制作一个简易机器人的方法有多种,以下为一种简单的方法:
材料:
1. 一个空的饮料瓶
2. 两个小型电动振动马达
3. 两个小型齿轮
4. 一些线材
5. 一个电池盒
6. 一个开关
7. 一些纸板、胶带和胶水
步骤:
1. 首先将两个电动振动马达固定在饮料瓶的底部,以使它们平衡地旋转。
2. 使用胶带将齿轮固定在振动马达的轴上,并确保两个齿轮彼此咬合。
3. 在饮料瓶的一侧剪一个小口,将电池盒通过该口固定在饮料瓶上,并将电池连接到振动马达。
4. 在饮料瓶的另一侧剪一个小口,将开关通过该口固定在饮料瓶上,并将开关连接到电池和振动马达。
5. 制作机器人的身体部分,可以使用纸板制作一个简单的身体框架,然后用纸板制作头部和四肢,并使用胶水将它们固定在身体框架上。
6. 将头部部分固定在饮料瓶的顶部,并确保头部可以自由旋转。
7. 使用胶水将身体框架固定在饮料瓶的底部,以使机器人稳定地站立。
8. 根据需要,您可以为机器人设计和添加其他功能,例如眼睛、嘴巴等。
请注意,这只是一个简易机器人的基本制作方法,您可以根据自己的想法和兴趣进一步改进和定制机器人的功能和外观。
粤科版高中通用技术选修3:简易机器人制作单片机的软件
二、汇编语言
6、空操作指令 NOP是空操作指令,它不执行任何操作,但
会消耗一个指令周期的时间,一般用作短时间 的延时。
例如:控制8个发光二极管闪烁的程序具体 功能解释如下:
讨论和优化
1.在这8个步骤中,实际都重复着“直走 90°转弯”两个步聚的内容,我们能否将它简 化?当要求只走一次正方形路径时我们能将它 简化吗?
2.在转弯时能量级(功率)大合适还是 小更合适?为什么?
3.如果是让机器人原地转弯,程序应如 何改变?哪种效果更好?为什么?
4.如何通过机器人格建零件的交更,使 机器入拐90°的角更加流杨和准确?
今天的学习到此结束,大家都学会了么?
谢谢
的,其操作是把源操作数传送到目的操作数, 指令执行完成后,源操作数不变,目的操作数 等于源操作数。
二、汇编语言
2、算术运算类指令
算术运算类指令有:加、减、乘、除和加1、 减1指令等。 例如:INC R1
这是一条加1指令,指令执行结果是将R1中 的数加1。
二、汇编语言
3、逻辑运算类指令 逻辑运算类指令有与、或、异或、求反、
二、汇编语言 (一)汇编语言指令格式
汇编语言指令格式如下:
二、汇编语言
(二)MCS51系列单片机常用指令介绍 MCS51系列单片机共有111条基本指今,它
们分为数据传送类指今、算术运算类指今、编 辑运算类指令、控制转移类指令和位操作指令。
二、汇编语言
1、数据传送类指令 数据传送类指令一般以MOV为操作码助记符
一、单片机的编程语言简介
这三类语言中,高级语言较容易学习和使 用,但是其源程序经编译序编译后的机器指令 代码往往比完成相同功能的汇编语言程序编译 后的指令代码要紧杂冗长 , 占用程序存储器的 空间较多,程序运行时间较长,由于单片机的 存储器容量较小,在一些实时控制的应用中对 程序的运行时间要求较严格的情况Leabharlann ,采用汇 编语言有其一定的优越性。
粤科版高中通用技术选修3:简易机器人制作单片机的基本知识
放学路上,小华跟小军说:“我家昨天买了一台新 电 脑 ” , “ 呦 , CPU 是 什 么 型 号 的 ? ” , “ 奔 腾 4” , “内存多大?”,“256兆”,“啊!太好啦,运行起 来一定很快!”,“是啊”。
一、什么是单片机
上述对话中,我们知道组成一台计算机的主要部 件有CPU、内部存储器、输入/输出接口等。计算机的 主板如图1-2所示。
二、单片机的特点和应用
在某中学的足球机器人比赛活动中,高二(1) 班的1号机器人和高二(2)班的机器人进行了两局 对抗赛,第一局2号机器人赢了。中间休息时,高二 (1)班的同学针对2号机器人在场上的表现对1号机 器人的程序进行修改,第二局一开始,1号机器人与 第一局相比判若两人,很快占据主动,获得胜利。
一、什么是单片机
计算机的发明给我们带来一次新的技术革命,现 在计算机的应用已经渗透到社会各个领域,随着技术 的发展和应用的需求,人们设计和生产了一种微型的 计算机芯片,这种芯片可以装嵌在许多控制设备中实 现智能控制。例如我们身边的许多智能型家用电器中 就嵌入了这种芯片,实现了智能化。这种芯片称为单 片机(图1-3)。
设计参观与调查
任务
通过参观,到图书馆查阅资料和上网浏览 等方式,调查收集有关单片机应用方面的信息, 并将其各种应用分类整理成表格,写出调查报 告。
组织与分工
3-5名同学为一组,自由组合,选出组长, 确定工作任务,并在组内进行分工。
今天的学习到此结束,大家都学会了么?
谢谢
二、单片机的特点和应用
在我们身边,越来越多的智能型家用电器如电 饭锅、微波炉、电磁炉、洗衣机、电视机、数字音 响等都嵌入单片机。
在智能仪器上单片机也有其用武之地。
二、单片机的特点和应用
简易机器人制作-1
三、未来机器人
发展趋势
传感型智能机器人:多传感器融合与集成技术
新型智能技术:人工神经网络、虚拟现实技术
微型与中型机器人:应用于医疗、运输等行业
模块化设计技术:模块化组装、离线编程
在未来20—50年的时间内,个人机器人将逐步走入人类的日常 生活,与人友好共存,彻底改变这个时代的生活方式。
课后作业
简易机器人制作
天津市和平区劳技中心
1、按时完成课程学习 2、按时上交作业 3、欢迎交流学习经验 4、遇到问题可在邮箱中提问
联系邮箱 1、下载课件邮箱
登录号:
密码:
JYJQRZZGYJ@
TJSHPQ
2、交流收件邮箱
JYJQRZZGYJ1@
第一讲:走进机器人
小版 瓦ቤተ መጻሕፍቲ ባይዱ机器人
机器人的历史
一、古代机器人
汉代
三国时期
18世纪欧洲
古人用水钟 来滴漏计时
张衡发明了计里鼓 车,每行一里,击 鼓一下。
诸葛亮运用木牛流 马做为战争运输工 具。
机器木偶在欧洲
风靡一时。
二、现代机器人
随着社会的进步,机器人的种类
你可以教机器人下棋,想一想,
功能也越来越多,它们不仅能工作、 “深蓝”为何能击败卡斯帕罗夫? 服务人类,还能供人们娱乐!
1、机器人的历史大致分为几个时期?
2、寻找生活中的一款机器人,简要介绍一下 它的功能?
卡雷尔· 恰佩克
(1890 - 1938)
机器人的定义
辞典: 我国科学家对机器人的定义:
机器人是一种自动化的机器,所不同 的是这种机器具备一些与人或生物相似的 机器人是能够代替人类做事的 自动装置或具有人类形态的机器。 智能能力,如感知能力、规划能力、动作
豫科版高中通用技术选修3:简易机器人制作简易机器人常用输出元件
本节以电磁继电器为例讲解继电器的原理。
电磁继电器的结构
单片机与继电器的连接
四、电机
电机(本书指电动机)在第一章就介绍过,机器人的机械 结构相当于人的四肢,用来行走、操作等。驱动机器人关节 动作的装置叫驱动装置。简易机器人的驱动装置绝大多数由 电机担当。
LED的使用方法
Lபைடு நூலகம்D与单片机接口电路
二、蜂鸣器
简易机器人使用蜂鸣器发出声音。对发声器件进行编 程,我们就可以凭声音来判断机器人工作是否正常,有时 听声音比看LED发光更方便。
压电蜂呜器是由压电陶瓷发声元件和振荡电路组成的 电声元件。
压电蜂鸣器实物
压电蜂鸣器的符号
三、电磁继电器
几种继电器
继电器是当输入量(或激励量)满足规定条件时,能在 一个或多个电器输出电路中产生跃变的一种器件。简单理 解就是用一种电源控制另一种电源通断的器件。
一、发光二极管
发光二极管(LED)是很常用的显示器件,手机的信号显 示灯、PC机硬盘及光驱的指示灯等都是例子。简易机器人 控制电路板上有若千个发光二极管,用来显示各种工作状 态。
外形
符号
二极管是一种半导体器件,根据施加电压的极性, 产生导通和不导通两种效果。二极管由N型半导体(半 导体中的电子携带电荷流动)和P型半导体(电子迁移 所剩空穴携带电荷流动)结合而成,结合面被称为PN 结。LED是二极管的一种,其原理是在PN结让电子与 空穴再次结合,此时产生的能量以发光的形式释放出 来。
简易机器人常用输出元件
学习导航 1、简易机器人上常用的输出元件有儿
豫科版高中通用技术选修3:简易机器人制作什么是单片机
图2.3一种简易机器人控制器
一、单片机的特点 单片机有如下主要特点:
(1)集成高度,体积小:单片机内部除了有一个微处理器 外,还包含若干功能单元模块,如存储器、I/O口等,相当于 把PC机主板的功能集成在一块芯片上。
(2)可靠性高:由于未使用分立元件,故提高了电路的稳 定性、可靠性和抗干扰能力。
分析和计算—为实现机器人运动控制,完 成一定的逻辑分析和数字运算;
信号的输入输出—接收各种传感器的信息, 发出命令,控制机器人运作。
从满足上述功能要求来看,PC机或专用 机器人控制器无疑具有较大的优势。那么简 易机器人为什么要采用单片机控制呢?表 2.1对PC机或专用机器人控制器与单片机进 行了一个比较。
(6)易于开发:单片机种类丰富,开发工具完善,易 于掌握和开发。
(较少,运行速度较慢,存储空间有限,无 法运行大型软件。
(8)单片机一般不支持浮点运算,因此不适合应用 在有大量数值计算的场合。
谢谢
表2.1 PC机或专用机器人控制器与单片机的比较
在一些应用场合,尤其是小型机器人或简易机器人中, 像PC机这类通用的、功能完备的控制器不一定适宜,人们更 希望采用体积小巧、价格低廉的单片机。单片机就是集计算 机基本功能于一体的集成电路(IC)封装芯片,即大规模集成 电路(LSI)。这种IC芯片叫作微型计算机,也常常被简称为微 控制器(microcontroller)或单片机。它能搭载到机器人机体 内部,构成所谓的嵌入式系统。事实上,单片机在功能上就 相当于PC机的主板,单片机内部集成了微处理器(CPU)、存储 器,以及各种I/O口等。
图2.1是几种常用单片机的外观。单片机再 加上简单的外围电路就可构成一个简易机器人 控制器。图2.2、图2.3列举了两种基于单片机 的控制器,事实上它们都是以AVR系列单片机为 核心的控制电路板。本书将围绕图2.2所示的 RoCon控制器进行介绍。其主要配置如下: