半主动悬架模糊控制仿真
基于参数自调整模糊控制方法的半主动空气悬架仿真分析

基于参数自调整模糊控制方法的半主动空气悬架仿真分析刘宏伟;陈燕虹;田华;雷海蓉
【期刊名称】《汽车技术》
【年(卷),期】2005(000)012
【摘要】基于参数自调整模糊控制方法对半主动空气悬架系统进行了仿真分析和试验验证.以某空气悬架大客车1/4车辆模型为仿真对象,设计了参数自调整的模糊控制器,并以随机路面为输入、悬架动行程为约束条件、簧载质量振动加速度和车轮动载荷为评价指标,对模型进行了计算机仿真,同时依据仿真模型设计了空气悬架试验台.仿真和试验结果表明,当汽车行驶工况变化时,引入参数自调整模糊控制方法可以有效降低簧载质量振动加速度和车轮动载荷.
【总页数】5页(P19-23)
【作者】刘宏伟;陈燕虹;田华;雷海蓉
【作者单位】吉林大学;吉林大学;吉林大学;吉林大学
【正文语种】中文
【中图分类】U463.33
【相关文献】
1.基于模糊滑模backstepping的半主动空气悬架设计 [J], 孙丽颖;王君莹
2.汽车半主动空气悬架参数自调整模糊控制 [J], 郑明军;林逸;陈潇凯
3.基于模糊控制的半主动空气悬架对平顺性影响的仿真分析 [J], 邱英杰
4.基于模糊PID控制重型汽车主动空气悬架仿真分析 [J], 周雅倩;鲁力群;孙法军;
王毅;孙萌;李辉
5.半主动空气悬架的模糊神经控制仿真分析 [J], 陈燕虹;刘宏伟;田华
因版权原因,仅展示原文概要,查看原文内容请购买。
越野车半主动悬架的变论域模糊PID控制

Vol. 46 No. 6
Jun. 2022第46卷第6
期
2022年6
月
液压与毛动Chinese Hydraulics & Pneumatics
doi: 10.11832/j. issn.
1000-4858.2022.06.010
越野车半主动悬架的变论域模糊PID控制
潘乾鹏,周 龙,
吕宝占
,王禹龙
(河南理工大学 机械与动力工程学院,
河南焦作
454003)
摘要:为了改善半主动悬架的控制效果,利用变论域理论对模糊
PID控制器的输入论域和输出论域
进行调节。根据阻尼可调两级压力式油气悬架的力学特性,建立半车半主动悬架动力学模型,在
MATLAB/
Simulink中构建半车半主动悬架控制模型,以冲击路面和随机路面作为输入激励进行仿真。结果表明
,不同
路面激励下,
变论域模糊PID控制悬架和模糊
PID控制悬架的减振效果均明显好于被动悬架,在冲击路面激
励下的减振效果较好。冲击路面激励下,相较于模糊PID控制悬架,变论域模糊PID控制悬架的前、
后车身
垂直加速度和车身俯仰角加速度均方根分别减小30. 89% ,34.36% ,37.00% ,
车身动挠度均方根比较接近,
进一步提高了越野车的行驶平顺性。
关键词:
越野车;半主动悬架;
变论域;模糊
PID
;平顺性
中图分类号:TH137;TH138
;U463 文献标志码:B
文章编号:1000^1858 (2022)
06-0082-11
Variable Universe Fuzzy PID
Control of Semi-active
Suspension for
Off-road Vehicle
PAN Qian-peng, ZHOU Long, LV Bao-zhan,
WANG
Yu-long
(School of Mechanical and Power Engineering, Henan Polytechnic University, Jiaozuo, Henan 454003
汽车液压半主动悬架模糊控制系统仿真研究

汽车液压半主动悬架模糊控制系统仿真研究
王恩涌;陈翔;钱永生
【期刊名称】《力学与实践》
【年(卷),期】2007(029)003
【摘要】建立了二自由度1/4车体液压悬架的数学模型,介绍了利用模糊控制工具箱设计汽车液压半主动悬架模糊控制器的方法,通过应用MATLAB/Simulink对比仿真,得出了具有模糊控制器的液压半主动悬架的控制效果明显优于被动悬架的结论,为半主动悬架在车辆上的应用提供了依据.
【总页数】5页(P36-40)
【作者】王恩涌;陈翔;钱永生
【作者单位】兰州城市学院工学系,兰州,730070;兰州城市学院工学系,兰
州,730070;兰州交通大学,兰州,730070
【正文语种】中文
【中图分类】O3
【相关文献】
1.基于Adams/Car和Matlab/Simulink的汽车半主动悬架模糊控制研究 [J], 徐志强;高瑞贞;张京军;韩卫沙
2.基于Simulink的液压半主动悬架模糊控制系统仿真 [J], 白月飞;陈翔
3.基于整车的汽车半主动悬架系统模糊控制仿真研究 [J], 周玉丰;吴龙
4.汽车半主动悬架系统模糊控制仿真研究 [J], 徐晓美;郑燕萍
5.汽车磁流变半主动悬架系统模糊控制仿真研究 [J], 周玉丰;吴龙
因版权原因,仅展示原文概要,查看原文内容请购买。
汽车整车半主动悬架模块化并联模糊控制
摘要 : 针对 汽 车悬 架 复杂 大 系统 的特 点 , 在车辆动力学模型的基础上 , 研 究 半 主 动 悬 架 系 统 对 车 身 姿 态 的影 响 关 系 , 运 用 模 块 化并 联模 糊 控 制 和矩 阵逆 运 算 策 略 建 立 汽 车 整 车 半 主 动 悬 架 控 制 系 统 ; 对 不 同 的车 身 运 动 姿 态 采 用 不 同 的 控 制 规 则 , 设
ABSTRAC T : Ac c o r d i ng t o t h e c h a r a c t e is r t i c s o f t he f u l l v e h i c l e s us p e ns i o n l a r g e s y s t e m ,us i n g t h e s t r a t e g y o f mo d u- l a r i z e s p a r a l l e l f u z z y c o n t r o l a nd ma t ix r ps e u do i n v e r s e, t he s e mi —a c t i v e s u s p e n s i o n c o nt r o l s y s t e m wa s e s t a b l i s he d. Ba s e d o n t h e f u l l v e h i c l e d y na mi c s mo d e l ,t h e f u z z y c o n t r o l l e r b a s e d o n f u l l v e hi c l e bo d y po s e s c o o r di n a t i ng c o n t r o l
整车半主动悬架模糊控制研究
【 摘 要】 为了提 高半主动悬架的控制效果, 设计 了节流1可调式阻尼减振 器, : 7 根据汽车 系统动力 学原理 建立 了半主动 悬 架整 车模 型 , 用 Ma dn 模糊控 制 策略 , 采 m ai 设计 了基 于可调 阻尼减振 器 的汽 车半
主动悬架双模糊控制器,并以某微型轿 车为例在 M tb i u n 环境下进行 了阶跃激励仿真试验和随 a a/ m l k l S i
C HE o g L U S a — u , N L n , I h o h a HUANG C e hn
(c o l f uo bl a dTaf n ier gJa guU iesy Z ej n 0 , hn ) S h o o t A mo i n rfc gn ei ,i s nvri ,h ni g2 C ia e iE n n t a 1 1 2 3
js bedm i okasre O ei e ,n f lcr dl m -ci up ninss m W¥ ut l a pn s c bobrWSds ndada ul a e o s iates es yt O a gh g mo e f v s o e et lhdbsdo e r c l o hcednmi . mdnfzycnrlt tg a dpe ,n e s i e ae nt i i ef v il ya c Ma aiuz ot r eyW aot adt b a s h p np e s osa s d h
smiat ess es nfzyc nrl rb e n aj s l d m igso k asre a eind a da e — i up n i z o t l a d o ut e a p n h c ob r s d s e , c v o  ̄ oe s d b a b W g n
基于双模糊控制器的车辆半主动悬架仿真研究

基于双模糊控制器的车辆半主动悬架仿真研究
曾鸣;陈兵;尹忠俊
【期刊名称】《计算机工程与设计》
【年(卷),期】2009(030)003
【摘要】设计了以簧载质量垂向速度、簧载质量俯仰角速度及其变化率作为模糊控制器输入的控制策略,基于该双模糊控制器的车辆半主动悬架能够综合改善车辆的垂向和俯仰振动.以某型车半车悬架模型作为研究对象,对采用双模糊控制器控制的半主动悬架系统进行了计算机仿真分析.仿真结果表明,采用双模糊控制器控制策略能较好地改善车辆乘坐舒适性,达到综合减振效果.
【总页数】4页(P693-695,699)
【作者】曾鸣;陈兵;尹忠俊
【作者单位】北京科技大学,机械工程学院,北京,100083;北京科技大学,机械工程学院,北京,100083;北京科技大学,机械工程学院,北京,100083
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.基于T-S模型和PID控制的车辆半主动悬架仿真比较研究 [J], 张丽萍;弓栋梁;薛斌
2.基于MATLAB最优控制车辆半主动悬架研究及仿真 [J], 吴迪;崔志琴;陈翔
3.基于双模糊控制器的二自由度半主动悬架仿真研究 [J], 王孝鹏;陈秀萍;魏剑;吴龙
4.基于修正模糊控制器的半主动悬架仿真研究 [J], 洪昊;陈秀萍;王孝鹏
5.基于联合仿真的半主动悬架车辆行驶平顺性研究 [J], 刘伟;刘大维;陈焕明;符朝兴
因版权原因,仅展示原文概要,查看原文内容请购买。
半主动悬架模糊控制系统的仿真
半主动悬架模糊控制系统的仿真李奇;王靖岳【摘要】建立汽车的1/4车二自由度动力学模型,利用模糊控制工具箱设计了用于汽车半主动悬架的模糊控制器,通过应用MATLAB/Simulink对比仿真,结果显示传统的被动悬架在行驶平顺性方面不如使用模糊控制器的半主动悬架,应用模糊控制的半主动悬架系统可以有效提高汽车的行驶平顺性.【期刊名称】《机械工程师》【年(卷),期】2014(000)005【总页数】3页(P120-122)【关键词】汽车;半主动悬架;模糊控制;仿真【作者】李奇;王靖岳【作者单位】北京现代汽车有限公司,北京 100000;沈阳理工大学汽车与交通学院,沈阳 110159【正文语种】中文【中图分类】TP391.7悬架是汽车的重要组成部分之一,被动悬架平顺性是其缺点,主动悬架结构复杂、成本高、普及难[1]。
而结构较简单、造价低廉的半主动悬架则受到广泛重视[2]。
半主动悬架运用可调阻尼式减振器,能耗消耗很小,减振效果优良,逐渐得到了国内外的认可。
本文对某微型客车的半主动悬架系统控制性能进行分析评价,对常见的路面激励靠MATLAB进行仿真分析,对比分析被动悬架和模糊控制半主动悬架各性能指标的差异,最终说明采用模糊控制的半主动悬架在性能上明显优于传统的被动悬架。
本文对汽车的右前悬架建立二自由度1/4车半主动控制模型,并假设[3]:1)把簧载质量与非簧载质量都视为刚体,不考虑车身悬置的阻尼和弹性;2)汽车在等速状况下行驶,轮胎一直不离开地面;3)悬架与轮胎刚度均为位移的线性函数,不计轮胎的阻尼;4)路面位移的输入函数作用在地面与轮胎接触点的中心。
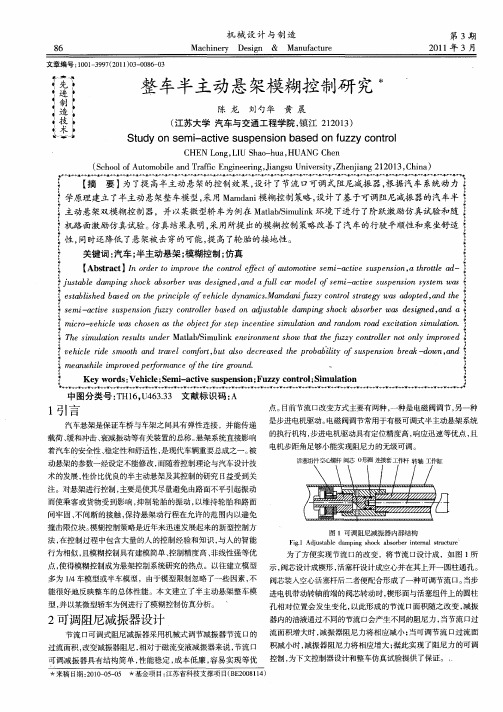
一个简化的二自由度1/4汽车模型如图1所示,m2为簧载质量,m1为非簧载质量,k2为悬架弹簧刚度,k1为轮胎等效刚度,C(包括C0和Cn)为黏滞阻尼系数,FMR为库仑阻尼力,z0是路面的激励,z1和z2分别是车轮和车身的位移。
根据牛顿第二定律,系统的动力学方程为:式中,fd为可控阻尼器的阻尼力由系统的动力学方程,可推出系统的状态方程及输出方程为车辆在行驶过程中,通过模糊控制器可以实现衰减车身振动,提高车辆乘坐平顺性。
轿车半主动悬架系统模糊控制
wh c u t b e f rt e s mia t es s e so y t m n p l ec n o t t g e — c i e s s e so i h i s i l o e — c i u p n i n s se a d a p yt o t l r e y i s mia t u p n i n s a h v h r sa n v s se s o t 1 y tm' c nr .W e as o a e wi h a s e s s e so ’ p ro m n e i d x o u o b l o y o lo c mp r t t e p s i u p n i n S e f r h v a c n e f a t mo i b d e
圈 I半 主 动 悬 架 系统 简 化 模 型
F g 1 S mp i e d l f e - c i es s e so se i. i l d mo e o mia t u p n i ns t m i f s v y
其运动微 分方程 为 :
z一cz —z) (: -+ ( 。 =一 (z t一 z 一z z一z) 甜 ) m2 一cz 一 1一 sz 一z) z (2 z) k(2 I= 2 f、 1
收稿 日期 :2 1 卜 l:修改 日期 :2 1—42 0 卜0 6 0 10 —2 基金 项 目: 国家 自然 科学 基金 项 目(02 08:安 徽省 教育厅 自然 基金 项 目(J0 0 0 1;安 徽工程 大 学青年 基金 项 目(0 7 09 186 9) K 2 1B 2 ) 2 0YQ 2 ) 作 者简介 :徐振 法(9 卜)男 ,安徽 巢湖人 ,讲 师 ,主要 从事 流体 传动 与控 制和 流体 机械 理论研 究 (- iwfz@s a o ) 18 , Emal l f i . r ; : x n cn 王幼 民(94 )男 ,湖 北孝感 人 ,教授 ,硕 士生 导师 ,主要 从事 流体 机械 设计 及流 体控 制研 究(— alw m l 16 o ) 16 一, E m i y t@ 2 r ; : f cn 王银 凤(9 91女 ,安徽砀 山人 ,讲 师 ,主要 从事 材料 性能 研究(— a :y@ap . uc) 17 —。 Er iw f h u d.n; nl e 王 玉勤f9 51 男,安徽舒 城人 ,研 究生 ,主 要从 事流 体传 动与 控制研 究 ( ・ iyqni@yhotm. ) 18 —, Emalu ili a o. c : l o n
汽车半主动座椅悬架自适应模糊神经滑模控制
汽车半主动座椅悬架自适应模糊神经滑模控制
贾继良;赵清海;杨景周;陈满
【期刊名称】《机械设计》
【年(卷),期】2024(41)4
【摘要】针对含有人体模型的5自由度座椅悬架系统,设计一种基于自适应模糊神经网络(Adaptive Neuro-Fuzzy Inference System,ANFIS)的滑模控制器(ANFIS-SMC)。
首先,设计一种时变滑模面,通过调整其斜率使系统状态点快速到达滑模面,从而提升系统控制速度;其次,通过ANFIS对切换增益在线调节,用切换项消除干扰,实现控制器在复杂多源干扰下精确控制;最后,仿真验证采用双曲正切函数代替切换项中的符号函数,使得输出更连续,有效降低抖振。
仿真结果表明:该控制器能有效提高系统的跟踪性能和响应速度,对不确定性干扰具有较好的鲁棒性,带有该控制器的座椅悬架乘坐舒适性明显改善。
【总页数】8页(P28-35)
【作者】贾继良;赵清海;杨景周;陈满
【作者单位】青岛大学机电工程学院
【正文语种】中文
【中图分类】U463.8
【相关文献】
1.车辆半主动座椅悬架滑模变结构控制
2.神经网络自适应模糊控制在汽车半主动悬架中的应用
3.车辆半主动座椅悬架自适应模糊滑模控制
4.基于滑模观测器的车辆
半主动座椅悬架系统H_(∞)最优控制5.汽车半主动悬架RBF模糊滑模控制器设计及仿真
因版权原因,仅展示原文概要,查看原文内容请购买。
汽车半主动空气悬架参数自调整模糊控制
hil s e tb ih d,a d a k n f mo e ba e n t e p r mee - ef t e uzy c n r lme h d i u c e i sa ls e n i d o d s d o h a a t rs l-un d f z o to t o s p t
摘 要: 建立两 自由度 14车辆半主动空气悬架 的非线 性动力 学模 型, 出一种基 于参数 自调整 的模 糊控制 / 提 系统结构的模 型 , 以 c级路面为随机输入 , 并 对空气悬架系统进行 了仿真分析 。研究结果表 明: 该控制 方法能够使 车身垂直振动加速度 、 悬架动挠度和车轮动载荷得到较大的衰减 , 高了汽车的操纵稳定性 能和平顺性能 。 提 关键词 : 振动与波 ; 空气悬架 ; 模糊控制 ;参数 自调整 中图分 类号 :4 3 3 U 6 .3 文献标识码 : A
fr ad i i p p r o w r n t s a e .W i h i ltd C—l s e o d p o l st e r n o i p t h i s s e s n h h t te s mua e ca s d r a r f e a h a d m n u ,t e a r u p n i i o