双闭环模糊控制系统的设计与仿真
模糊控制仿真实验设计

模糊控制系统的仿真实验实验目的:现有被控对象一:G(s)=1/(s2+2s+1)被控对象二:G(s)=K /【(T1s+1)(T2s+1) 】试设计一个模糊控制系统来实现对它的控制,并完成以下任务:任务一:通过仿真分析模糊控制器的参数的变化(主要讨论控制器解模方法和量化因子的变化)对系统性能的影响。
任务二:在控制器参数一定的情况下改变被控对象的参数,分析对象参数变化时fuzzy controller的适应能力。
任务三:在控制器参数一定的情况下改变被控对象的结构,分析对象结构变化时fuzzy controller的适应能力。
实验分析:要完成以上任务应分两个步骤:一设计模糊控制器,二用matlab的模糊逻辑工具箱建立模糊推理系统,并在simulink中实现对模糊系统的仿真。
接下来就以对象一为例说明模糊控制系统的仿真。
一、模糊控制器的设计模糊控制器的设计步骤为:1、选择控制器的输入输出:选择误差e及误差变化量ec为输入,u作为输出用于控制对象,这样模糊控制器具有二输入一输出的结构。
2、模糊集及论域的定义:z输入e的模糊子集为{NB NM NS NO PO PS PM PB}z输入ec和输出u的模糊子集均为{NB NM NS ZO PS PM PB}z e的论域为{-6 -5 -4 -3 -2 -1 -0 +0 1 2 3 4 5 6 }z ec的论域为{-6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 }z u的论域为{-7 -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 7 }我们选择三角形作为隶属度函数的形状,e的隶属度函数如下图所示:图1-1 ec的隶属度函数如下图所示:图1-2 u的隶属度函数如下图所示图1-3表1-14、选择输入输出变量的量化因子:这里暂时选定输入输出的量化因子Ke=Kc=Ku=1,接下来的仿真过程还可以调整。
5、择模糊规则前提交的方法为min,模糊推理方法为min,而反模糊化方法可以在仿真过程中设置。
基于模糊PID算法的双闭环直流调速系统仿真研究

基于模糊PID算法的双闭环直流调速系统仿真研究摘要直流电机广泛应用于工业自动化领域,在许多工业过程中扮演着重要的角色。
为了实现对直流电机的精确控制,双闭环调速系统被广泛采用。
本文提出了基于模糊PID算法的双闭环直流调速系统,并通过仿真研究进行验证。
仿真结果表明,该算法能够有效地提高直流电机调速系统的动态性能和稳定性。
关键词:直流电机,双闭环调速系统,模糊PID算法,仿真研究1.引言直流电机具有结构简单、启动电流小、调速范围广等优点,在工业控制中得到了广泛的应用。
双闭环调速系统是一种常用的直流电机控制方法,通过两个闭环控制器实现对电流和转速的控制,提高了控制系统的精确性和稳定性。
然而,传统的双闭环调速系统存在一些问题,如参数调整困难、响应速度较慢等。
因此,本文提出了基于模糊PID算法的双闭环直流调速系统。
2.双闭环直流调速系统结构双闭环直流调速系统包括了电流环和速度环两个控制环路。
电流环负责控制电机的电流,速度环负责控制电机的转速。
两个环路通过PI调节器连接,形成闭环控制系统。
3.基于模糊PID算法的双闭环直流调速系统设计模糊PID算法是PID算法的一种改进方法,将模糊控制理论引入到PID控制中,通过模糊化输入和输出变量,建立模糊规则库,利用模糊推理机制完成控制。
本文将模糊PID算法应用于双闭环直流调速系统中。
4.仿真研究在Matlab/Simulink环境下进行双闭环直流调速系统的仿真研究。
首先,建立系统的数学模型,包括电机的电流方程和速度方程。
然后,根据数学模型,设计模糊PID控制器,并设置合适的控制参数。
最后,进行仿真实验,对比分析不同控制算法在系统动态响应、稳态误差等方面的性能差异。
5.仿真结果与分析通过仿真实验,得到了基于模糊PID算法的双闭环直流调速系统的性能数据。
对比分析表明,采用模糊PID算法的控制器能够有效地提高系统的动态性能和稳定性,减小了调试的难度。
6.结论本文提出了基于模糊PID算法的双闭环直流调速系统,并进行了仿真研究。
模糊自整定PID双闭环直流调速系统建模及仿真分析
模糊自整定PID双闭环直流调速系统建模及仿真分析作者:陈德海潘兴宾来源:《价值工程》2014年第22期摘要:本文章对于工程上常采用的直流调速控制系统,详尽地阐述了双闭环调速系统的PID控制原理,分别对调速系统的电流环、转速环的动态特性、抗干扰特性进行simulink仿真实验。
针对在克服较大扰动和提高系统动态品质的要求,设计了一种基于模糊控制理论的PID 控制器并对调速系统进行仿真实验。
通过与原有PID控制器进行对比,发现基于模糊控制理论的PID控制器可以显著提升控制效果,并且具有非常强的抗干扰特性,快速的系统响应,良好的动态特性等。
Abstract: Aiming at the DC speed regulation system often used in project, this article elaborates the PID control theory of dual-closed loops speed regulation system, and makes the simulink simulation experiment to the dynamic characteristic and anti-interference characteristic of the current loop in speed regulation system. To overcome larger disturbance and improve the dynamic quality of system, this article designs a PID controller based on fuzzy control theory for simulation experiment of speed regulation system. Compared with the original PID controller, PID controller based on fuzzy control theory can greatly improve the control effect, has very strong anti-interference characteristic, fast system response, and good dynamic characteristics.关键词: PID控制;模糊控制;双闭环;直流调速;simulinkKey words: PID control;fuzzy control;double closed loops;DC speed control;simulink中图分类号:TM921 文献标识码:A 文章编号:1006-4311(2014)22-0057-040 引言直流调速控制因其具有良好的起动、制动性能,在现代化生产中起着重要作用,在轧钢机、矿井卷扬机、高层电梯等需要高性能可控电力拖动的领域中得到了广泛的应用[1]。
基于模糊控制的双闭环系统及仿真分析

( 1 )
额 定 励磁下 的感 应 电动 势 和电磁 转矩 分别 为 :
E:
=
( 2 )
( 3 )
图2 H桥 双 极 性 控 制 原 理 图
忽 略粘 性 摩 擦 及 弹 性 转 矩 , 电动 机 轴 上 动 力 学方程 为 :
五= G D2 d n
一
( 4 )
V V AN G L i a n g .SU N S h o u - j u a n
( 1 . 中国矿业 大学 信息与 电气 工程 学院 ,徐州 2 2 1 0 0 8 ;2 . 江苏 师范大学 电气工程及 自动 化学 院,徐州 2 2 1 0 0 8 ) 搞 耍; 采 用模糊控制 实现直流 电机 双环调速 。文中首先建立 了直流 电机的数学 模型 , 分析 了转速和 电 流双闭环控制 的必要性 ,并 对转速环模糊 控制器设计 。提 出了模糊 P D 并联积分 的控 制器 结 构 ,完善 了P I D 控制器的性 能 , 提 高了系统的控制 精度。最后应用 M A T L A B /S I M U L I N K 工具 箱 , 实现 了直流 电机 模糊控制 系统 的计算机仿 真。仿真结 果表明 , 该方法 比经典P I D 控 制器具 有更快的动态响应和更高的调节精度。 关键词 :模糊控制 ;双环调速 ;s l m u l l n k 仿真 中圈分类号 :T M3 3 文献标识码 :A
0 引言
由于 直流 电动 机 具有 良好 的起 、制 动性 能 ,能 实现大 范 围 内平 滑 调速 ,故煤 矿 电机 车仍 采用 直 流 电机 牵 引。 由于 直 流 电机 系统 本身 的 非 线性 ,P I 调 节器 难 以保持 良好 的控 制性 能 。考 虑 到模 糊控 制 实 现 的简 易性 和 快 速性 ,又 不 依赖 于 对 象 的模 型 , 因
基于模糊控制的双闭环直流电机调速系统的设计仿真

Telecom Power Technology设计应用基于模糊控制的双闭环直流电机调速系统的设计仿真1,蒋丰庚2,张以全1,肖少华嘉兴供电公司,浙江嘉兴314000;2.国网浙江省电力有限公司双创中心,浙江直流电动机具有较好的机械特性和调速性能,在一些比较特殊的行业中能够体现出显著的优越性。
针对MATLAB/Simulink对传统的PID控制方法和该文提出的模糊控制方法分别进行仿真实验。
通过仿真对比,验证了该电流、转速双闭环控制系统在直流电机控制应用中的有效性和工程应用价值。
模糊控制;直流调速;MATLAB/Simulink仿真Design and Simulation of Double Close-Loop DC Motor Speed Control System Based onFuzzy Control, JIANG Fenggeng2, ZHANG Yiquan.State Grid Zhejiang Electric Power Co., Ltd., Jiaxing Power Supply Company, Jiaxing.Entrepreneurship and Innovation Center of State Grid Zhejiang Electric Power Co., Ltd., Hangzhoubecause they have goodperformance, and they can show obvious advantages in some special industries. Based on the modeling of DC motor, 2021年12月25日第38卷第24期Telecom Power TechnologyDec. 25, 2021, Vol.38 No.24 钟全辉,等:基于模糊控制的双闭环直流 电机调速系统的设计仿真开始,首先对其进行一定的等价变换和近似化的处理,并根据设计要求确定需要将其矫正成哪一类的典型系统,其次按照具体控制对象决定电流调节器的类型,最后依照动态性能指标要求确定各个环节调节器的参数。
基于模糊PID算法的双闭环直流调速系统仿真研究
基于模糊PID算法的双闭环直流调速系统仿真研究摘要:双闭环直流调速系统是一种常见的电机调速系统,模糊PID算法是一种在传统PID算法基础上加入模糊控制的方法。
本文针对双闭环直流调速系统,采用模糊PID算法进行仿真研究,通过对比传统PID算法与模糊PID算法在不同工况下的调速性能以及稳定性,验证模糊PID算法的优越性。
研究结果表明,模糊PID算法在双闭环直流调速系统中具有更好的性能和稳定性。
关键词:双闭环直流调速系统,模糊PID算法,仿真研究1.引言直流电机调速系统广泛应用于工业生产中,对调速系统的性能和稳定性有较高要求。
传统PID算法在调速系统中被广泛使用,但是对于非线性、时变等复杂系统,PID算法的性能存在一定的限制。
为了提高调速系统的性能和稳定性,研究人员提出了模糊PID算法。
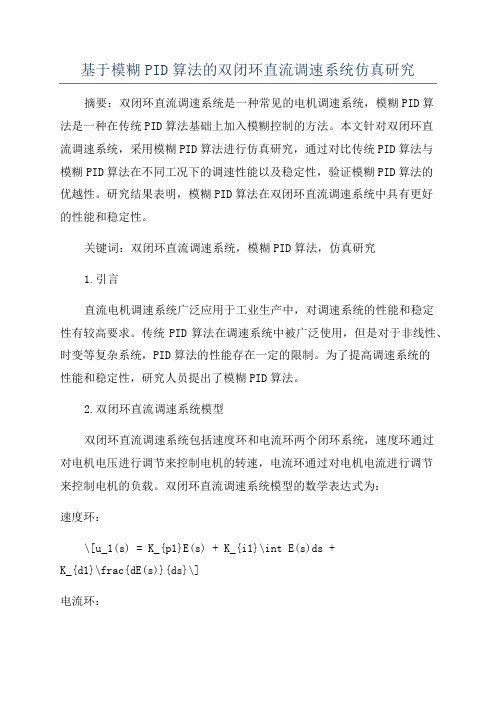
2.双闭环直流调速系统模型双闭环直流调速系统包括速度环和电流环两个闭环系统,速度环通过对电机电压进行调节来控制电机的转速,电流环通过对电机电流进行调节来控制电机的负载。
双闭环直流调速系统模型的数学表达式为:速度环:\[u_1(s) = K_{p1}E(s) + K_{i1}\int E(s)ds +K_{d1}\frac{dE(s)}{ds}\]电流环:\[u_2(s) = K_{p2}I(s) + K_{i2}\int I(s)ds +K_{d2}\frac{dI(s)}{ds}\]其中,\(u_1(s)\)和\(u_2(s)\)分别为输出控制信号,\(E(s)\)和\(I(s)\)分别为速度误差和电流误差,\(K_{p1}\),\(K_{p2}\)等为PID 控制器的参数。
3.模糊PID算法原理模糊PID算法是在传统PID算法的基础上加入模糊控制的方法,通过模糊化、规则库和解模糊化三个步骤实现模糊PID控制。
模糊化将输入和输出变量转换为模糊集合,规则库定义了不同输入与输出之间的关系,解模糊化将模糊集合转换为具体的输出值。
dq075阶倒立摆系统的双闭环模糊控制与MATLAB仿真
第1章引言1.1 模糊控制理的发展历史、研究现状及展望1.1.1 模糊控制理论的发展历史模糊逻辑控制(Fuzzy Logic Control)简称模糊控制(Fuzzy Control),是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术。
在人类自然科学的发展历史上,人们总是以追求事物的精确性描述为目的来进行研究,并取得了大量的成果。
随着科学技术的进步,在社会生产和生活中存在的大量的不确定性开始引起人们的注意。
1965年,美国的L.A.Zadeh教授创立了模糊集合论;1973年他给出了模糊逻辑控制的定义和相关的定理。
1974年,英国的E.H.Mamdani首先用模糊控制语句组成模糊控制器,并把它应用于锅炉和蒸汽机的控制,在实验室获得成功。
这一开拓性的工作标志着模糊控制论的诞生。
模糊控制实质上是一种非线性控制,从属于智能控制的范畴。
模糊控制的一大特点是既具有系统化的理论,又有着大量实际应用背景。
模糊控制的发展最初在西方遇到了较大的阻力;然而在东方尤其是在日本,却得到了迅速而广泛的推广应用。
近20多年来,模糊控制不论从理论上还是技术上都有了长足的进步,成为自动控制领域中一个非常活跃而又硕果累累的分支。
其典型应用的例子涉及生产和生活的许多方面,例如在家用电器设备中有模糊洗衣机、空调、微波炉、吸尘器、照相机和摄录机等;在工业控制领域中有水净化处理、发酵过程、化学反应釜、水泥窑炉等的模糊控制;在专用系统和其它方面有地铁靠站停车、汽车驾驶、电梯、自动扶梯、蒸汽引擎以及机器人的模糊控制等。
目前,模糊控制技术日趋成熟和完善。
各种模糊产品充满了日本、西欧和美国市场,如模糊洗衣机、模糊吸尘器和模糊摄像机等等,模糊技术几乎变得无所不能,各国都争先开发模糊新技术和新产品。
多年来一直未解决的稳定性分析问题正在逐步解决。
模糊芯片也已研制成功且功能不断加强,成本不断下降。
直接采用模糊芯片开发产品己成为趋势。
双闭环液位模糊PID控制系统的设计
双闭环液位模糊PID控制系统的设计摘要常规PID控制器结构简单,鲁棒性强,但是不易在线整定,对非线性系统的控制效果也不是很好,而模糊控制能够克服上述缺点,只是进入稳态后会存在一定的静差,因而将两者结合起来的模糊自整定PID控制器能进一步改善液位控制系统的性能。
本文通过试验法建立被控对象的数学模型,设计•出双闭环液位串级控制系统,主调节器用模糊自整定PID控制,副调节器均采用比例控制。
针对液位控制系统特征,选取合适的模糊控制规则和隶属度函数,设计模糊自整定PID控制器,并计算出模糊控制表。
将设计的审级系统在Simulink中仿真,并在被控对象模型参数变化和添加扰动的情下,比较了常规PID与模糊自整定PID的控制效果。
验证了模糊自整定PID控制器的优越性能。
关键词:吊级控制系统;PID控制;模糊自整定PIDDesign of double-loop Liquid-levelControl System with Fuzzy PIDAbstractPID controller has a simple structure and good robustness, but the parameters of conventional PID can not be easily regulated on line・When it is used in the nonlinear systems, usually the satisfactory performance can not be obtained. Fuzzy control can overcome the above disadvantages, but the static error is difficult to disappear. Therefore, the combination of fuzzy control and PID control would furtherly improve the performance of the liquid-level control system. In this thesis, the mathematical model of the plant is firstly built by the experimental method. Then the three-loop cascade control system, with the fuzzy self-regulating PID controller as the main controller and the P controller as the two subregulators, is designed. For the liquid level control system, the fuzzy self-regulating PID controller is designed after designing the appropriate membership functions and fuzzy control rules,.The simulations of the designed cascade system are carried out in Matlab/Simulink environment..The real time control results show that the fuzzy self-regulating PID controller has good control performance.Keywords:cascade control system; PID control: fuzzy self-regulating PID第一章绪论自动控制理论经历了经典控制理论、现代控制理论两个发展阶段,现在已进入了非线性智能控制理论发展时期。
模糊控制系统课件4.5(模糊控制系统的设计与仿真)
面。
在图5.22中,在Workspace variable栏内填入fzy1,单击 OK按钮。这样就将模糊推理系统FIS所构建的参数传递给模 糊推理系统仿真编辑图形化窗口中名称为fzy1的Fuzzy Logic Controller。
图5.22 Fuzzy Logic Controller参数传递
4.5.3 模糊控制系统仿真
Simulink基本模块库包含的是最基本的仿真模块,是
MATLAB仿真建模的基础。每一个模块在使用时都需要设 定一些相关参数,一般可以在模型编辑窗口双击该模块,然 后在相应的弹出对话框里来设定这些参数。用右键单击模块 图标,还可以在弹出的菜单里选择相关操作。
2. Simulink Extras扩展模块库
图5.27 建立控制规则
图5.28 模糊推理系统输出面
5.3.2 建立Simulink仿真编辑环境
在MATLAB命令窗口中单击Simulink图标,激活仿真模 块库,根据5.2节所讲的步骤,建立仿真模型编辑环境窗口, 将仿真所需要的模块用鼠标拖入其中并连接好,如图5.29所 示。这里只讲解模糊控制系统的仿真方法,模块参数选择较 粗糙(调整参数的方法可参阅5.3节的内容)。仿真系统中,模 糊控制器的输出采用增量式输出,系统给定值h=2 m,水箱 数学模型为
图5.20 模糊推理系统仿真系统编辑窗口
图5.21 设定模糊逻辑控制器的名称
将在模糊推理系统仿真界面中建立的模糊推理系统fzy1
打开。操作步骤如下:在MATLAB命令窗口中输入命令 fuzzy→Enter,出现FIS Edit编辑器画面,单击File→Import →From Disk,打开5.1节所建立的模糊推理系统fzy1.fis; 接 着单击File→Export→To Workspace,打开如图5.22所示的界
异步电机磁链转矩双闭环模糊PID控制仿真
异步电机磁链转矩双闭环模糊PID控制仿真MATLAB软件包括MATLAB主程序和许多日益增多的工具箱。
工具箱实际就是用MATLAB基本语句编写的各种子程序集,用于解决某一方面的专门问题或实现某一类的新算法。
MATLAB提供了与其他应用语言的接口,以实现数据的共享和传递。
本文将模糊控制和PID控制结合在一起,根据各自的特点构造了一个自整定模糊PID控制系统,并在MATLAB中的模糊逻辑工具箱和SIMULINK基础上,对该控制系统进行了仿真研究。
异步电机动态控制需要建立电机的动态数学模型,Simulink中的交流电动机模型就是建立在矢量坐标变换基础上的动态模型,在矢量控制系统中坐标变换和磁链观察都是矢量控制系统的重要方面。
4.1 异步电机坐标变换坐标变换包括三相静止坐标系和两相静止坐标系的变换(简称3s/2s变换)、两相静止坐标系和两相旋转坐标系的变换(简称2s/2r变换)。
三相坐标系上的三相对称绕组A,B,C通以三相对称电流产生旋转磁动势F,F 的旋转速度ω1=2πf s。
f s为三相电流的频率。
二相旋转坐标系上的二相绕组d,q通以二相对称电流也产生旋转磁动势,对dq坐标系的旋转速度为ω1=2πf r。
f r为电流的频率,因为dq坐标系本身是旋转的,其旋转速度为ω,如果二相坐标系上电流产生的磁动势与三相坐标系上电流产生的磁动势F大小相等旋转速度也相同F=F r,ω1=ωr+ω,这时二相旋转坐标系绕组可以等效于三相静止坐标系上的绕组,即三相绕组可以用二相绕组来代替,坐标变换揭示了三相绕组电压(电流)与二相绕组电压(电流)之间的关系。
三相→二相的坐标变换,即abc-to-dq0 Transformation模块的表达式为:4-2)4-3)式中ω为转子旋转的角频率ω=2πf,设sin )sin(cos )cos(011==-==-=u t U t U u t U t U u r s s q r s s d ωωωωωω(4-4)将其带入得(4-5) (4-6) (4-7)在二相旋转坐标系上,电压幅值为U s ,频率为f r =f s -f二相→三相的坐标变换关系,即dq0-abc transformation 模块的表达式为:(4-8) (4-9)(4-10)模块的abc 端输入或输出三相信号,dq0端输入或输出二相信号和0轴信号,信号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《运动控制系统》课程设计学院:物联网工程学院
班级:
姓名:
学号:
日期:
成绩:
文章编号:
双闭环模糊控制系统的设计与仿真
(江南大学物联网工程学院,江苏省无锡邮编214122)
摘要:直流电机具有良好的起动、制动性能,因此其在电力拖动自动控制系统中应用广泛。
众所周知,直流电机的闭环系统静特性要比开环系统的机械特写硬的多,而转速、电流双闭环控制直流调速系统是性能好、应用最广泛的直流调速系统,但该系统依赖精确的数学模型,在增加解决环节的同时,系统模型趋于复杂,还可能会影响系统的可靠性。
因此我们在总结了以前经验的同时,提出了双闭环模糊控制系统的的设计与仿真。
关键词:直流电机;双闭环系统;模糊控制
中图分类号:文献标识码:A
Double Closed Loop Fuzzy Control System Design and Simulation
Author name
(Jiangnan University, Wuxi 214122, China)
Abstract:DC motor has good starting, braking performance, therefore in the electric drive automatic control system is widely applied in the field of. As everyone knows, the closed-loop DC motor system static characteristics than the open loop system of mechanical feature of more than hardware, and speed, electric current double closed loop DC motor control system is of good performance, the most widely used DC speed regulating system, but the system depend on the accurate mathematical model, increase solve link at the same time, the system model tends to be complex, also may influence the reliability of the system. Therefore we are summing up the previous experience at the same time, put forward a double closed loop fuzzy control system design and simulation.
Key words:DC Motor; Double Closed Loop System; Fuzzy Control
1 引言
2 双闭环直流调速系统的设计
直流电动机具有启动转矩大、调速范围宽等优势,在轧钢机、电力机车等方面仍广泛采用。
直流调速系统在理论上和实践上都比较成热,从控制技术的角度来看,它又是交流调速系统的基础;电力电子技术、计算机控制技术、智能控制理论的发展,,更为直流调速系统继续发展和应用提供了契机。
进入21世纪后国外一些公司仍在不断推出高性能直
流调速系统。
因此,对直流调速系统的研究仍具有重要意义。
直流调速系统中最典型的控制方式就是速度、电流双闭环调速。
由于受参数时变和不确定性等因素的影响,传统的控制方法常受到很大的局限。
另外,PID 控制方法往往在系统快速性与稳定性之间不能两者兼顾。
模糊控制不依赖于被控对象的精确数学模型,既能克服非线性因素的影响,又具有较强的鲁棒性。
因此,给直流电动机双闭环调速系统引入模糊控制器,可以改善系统性能。
2.1 双闭环可逆直流调速系统的原理结构
为了实现转速和电流两种负反馈分别起作用,
可在系统中设置两个调节器,分别调节转速和电流,即分别引入转速负反馈和电流负反馈。
二者之间实行串级联接。
把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变
换器UPE。
从闭环结构上看,电流环在里面,称作内环;转速环在外面,称作外环。
这样就形成了转速、电流双闭环调速系统。
如图1所示。
图1直流双闭环调速系统结构
双闭环直流调速系统目前应用广泛、技术成熟,常采用PID控制方式,它具有结构简单、可靠等优点,取得了较好的控制效果。
但是,在实际生产现场,由于条件限制,使得PID控制器参数的整定往往难以达到最优状态,另外,PID 控制方法必须在系统快速性与稳定性程度之间做出折衷,往往不能两者兼顾,而模糊控制能利用其非线性特性,突破PID方法的局限,使调速系统既有快速的动态响应,又有较高的稳定程度。
除此之外,模糊控制又进一步提高了调速系统的鲁棒性。
调速系统的模糊控制模型在异步电动机闭环调
速系统的结构中,转速环是决定控制系统的根本原因,而电流环则主要是改变电机运行特性以利于外
环控制。
本文在建立仿真模型时,转速环采用模糊控制器而电流环仍采用传统的PID控制器。
考虑电动机的实际运行,在电流环PID的设计中,积分作用项加上了内限幅环节,而电流调节器的输出则加上外
限幅环节。
2.2 模糊集和模糊论域及隶属函数的确立
二维模糊控制器的输入变量基本上选用受控变量值和输入给定值的偏差e和偏差变化ec,由于它们能够严格地反映受控过程中输出量的动态特性,
因此,在控制效果上要比一维控制器好的多,也是目前采用较广泛的一类模糊控制器。
图2 是模糊控制器的结构图。
图2 模糊控制器结构图
双闭环直流调速系统的电流环仍采用PID控制,而速度环采用模糊控制,在模糊控制器中,偏差e采用负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB)7个模糊状态来描述,相应的论域:e={-6,-5,-4,-3,-2,-1,-0,+0,+1,+2,+3,+4,+5 ,+6}偏差变化ec采用NB,NM,NS,ZO,PS,PM,PB7 个模糊状态来描述,其论域
为:ec={-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6}控制量u 采用NB,NM,NS,ZO,PS,PM,PB7个模糊状态来描述,其论域
为:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}误差e、误差变化ec及控制量u的模糊集和论域确定后,需对模糊变量确定隶属函数,即对模糊变量赋值,确定论域内元素对模糊变量的隶属度。
选择输入变量的隶属度函数为三角型函数,输出变量的隶属度函数也为三角型函数。
得到的E、EC 和U的隶属函数如图3 所示。
图3 变量隶属度函数图
2.3 模糊控制规则的建立
输入模糊变量通过模糊规则与输出模糊变量建立关系,在考虑模糊控制规则时,选取控制量变化得原则为:当误差大或较大时,选择控制量以尽快消除误差为主;当误差较小时,选择控制量要注意防止超调,以系统得稳定性为主要出发点。
控制规则表如表1 所示。
表1模糊控制规则
3 系统仿真
我们最后应用MATLAB语言中的SIMULINK 工具,对模糊控制器在直流调速系统中的控制效果
进行仿真,在仿真过程中,分别将外环的转速调节器置为模糊控制器,用于仿真的数据如下:直流电动机:220V,136A,1460r/min,Ce=0 132Vm
in/r,过载倍数λ=1 5,Ks=40,R=0 5Ω,T1=0 03s,Tm=0 18s,Toi=0 002s,Ton=0 01s,反馈系数:α=0 007Vmin/r,β=0 05V/A。
直流电机:220V,136A,1460r/min,Ce=0.132V·min/r;晶闸管装置放大系数Ks=40;电枢回路总电阻R=0.5Ω;时间常数Tl=0.03s,Tm=0.18s;电流反馈系数β=0.05V/A;三相桥式电路的平均失控时间
Ts=0.0017s。
给定的输入阶跃角速度为150rad/s,得到响应的转速曲线如图4。
图4 模糊-PI转速响应曲线
为与传统的双闭环控制相比,建立常规的双闭
环控制仿真模型,得到的仿真曲线如图5所示,从图中可以看出,系统的超调量较大,调节时间较长。
由图4 模糊-PI 可知,系统响应的超调量减小了,系统的稳态时间缩短了,并且有效抑制了振荡,控制精度较高。
图5 双PI 调节器转速响应曲线4结语
( 1) 严格工程设计下的常规直流双闭环系统动、静态性能较好, 适用性强, 其理论体系为其它调速技术的基础;
( 2) 借助Matlab的模糊逻辑工具箱不但能实现Simulink的无缝连接, 而且通过
Real2timeWorkshop能生成ANSIC源代码, 从而易于实现模糊系统的实时应用;
( 3) 比较而言, 引入模糊控制的新双闭环调速系统响应速度提高、过渡稳定、系统超调得到改善,为直流双闭环调速系统的又一可选策略。
参考文献(References)
[1]陈伯时.电力拖动自动控制系统—运动控制系统.
[2]章卫国,杨向忠.模糊控制理论与应用.
[3]刘金琨.先进PID控制MATLAB仿真
[4]章丽红,臧小惠.基于 FUZZY- PID直流调速系统的
仿真与分析
[5]蔡自兴.智能控制—基础与应用
[6]何志琴.基于MATLAB 软件的直流调速系统辅助设计。