基于GPS的嵌入式太阳跟踪控制系统设计
移动式太阳追踪控制系统的设计与实现

录仪的移动式 太阳追踪控制 系统 : ( 1 ) 太阳追踪 传感 器。太 阳追 踪传感器主要足搜索信号 , 凶此 需要具有体积小 、 质量轻 以及 功耗低的特点 , 结合不同类型传感器 的特点 , 本设计选 择 P S D L j
光敏二檄管村 { 结合 的方 案,利用 光敏二极 管对太 位置进行企 找. 然后利用 P S D传感器进 行精准定位 ; ( 2 ) 太阳追踪控 制系统 电气硬件设计_ ¨电气硬件设纠‘ 是 个硬件控制系统的核心 , 其主 身的电流很小 , 不利于控 制器的采集 , 此需要增加放大 器和滤 波电路 ( 见网 1 ) ②光敏二假 管接 口电路设 汁, 本系统中选择 的
现 有 移 动式 太 『 j } = I 追 踪 系 统 的 研 究 .提 相 对 完 善 的 移 动 式 太 … 追 踪 控 制 系统 1移 动式 太 阳追 踪 控 制 系统 的 硬 件设 计
变化而调整 ; 具备远程控制 , H . 能够实时传输数据等等。( 1 ) 太 阳追踪控制 系统 的主程序没计 系统 电源歼启之后 , 系统会 门动
传感器 没有接 收到卡 日 荚信号时需要 系统根据预定的程序 r i 动搜
3 车载 试 口电路 设 计, 由于 P S D传 感器 本 索 信号 , 当搜索 到信号之后 , 需 要执行精确追踪模』 。
为r 检验 系统 的准确性 ,设计的系统安装 轮船上进 行试 验, 具体的试验 如下 。
完成初 始化操作 , 然后根据环境 自动 没定模式 , 将 俯仰轴降剁最 低, 接触到 限位之后反 向运 动 , 系统检 测传感器状 态 , 盘 I 1 果没有 榆测到 信 , 就会高 5个角度 , 然后继续 寻找信 , y - l J 完 成信
号收集 。( 2 ) 数据采集和处理 子程序 本 系统设计 套 传感 器采 集 系统 ,其 日的就是 为了保证实时跟着太阳 、本 系统采取 的是 P S I )传感 器 , 而且 为了保证采 集数据 的准确 性 , 采集电路 巾增
单片机太阳能跟踪系统设计

单片机太阳能跟踪系统设计摘要:本文介绍了一种基于单片机的太阳能跟踪系统的设计。
该系统通过使用光敏传感器和步进电机,能够实时跟踪太阳位置并自动调整太阳能电池板的方向,以最大程度地吸收阳光能量。
文章详细讨论了系统的硬件设计和软件编程,并进行了实验验证系统的有效性与稳定性。
引言:随着可再生能源的发展和应用,太阳能作为一种绿色能源正变得越来越普遍。
而太阳能电池板作为太阳能转换的核心装置,其工作效率直接受到太阳光照强度和入射角度的影响。
因此,设计一种能够实时追踪太阳位置的太阳能跟踪系统,对于提高太阳能电池板的能量转换效率具有重要意义。
1. 系统硬件设计1.1 光敏传感器光敏传感器是实现太阳位置检测的关键模块,其作用是测量光强度并转化为电信号。
在本设计中,采用光敏二极管作为光敏传感器,通过调整电路参数和选用适当的滤光片以提高传感器的灵敏度和稳定性。
1.2 步进电机步进电机是用于控制太阳能电池板偏转角度的执行器。
本设计中,选用具有较高精度和可控性的双相步进电机,通过调节步进电机的脉冲信号和相位控制信号,可以实现对太阳能电池板的精确调整。
1.3 控制电路控制电路是整个系统的核心部分,主要由单片机、驱动电路和电源组成。
单片机作为系统的主控制器,通过接收光敏传感器采集的信号,并经过一系列计算和判断,生成控制信号给步进电机实现调整。
驱动电路负责将单片机输出的信号转化为适合步进电机工作的电流信号,以驱动步进电机。
2. 系统软件编程2.1 信号采集与处理在软件编程阶段,首先需要进行光敏传感器信号的采集与处理。
通过ADC模块采集光敏传感器输出的电压信号,并借助数字滤波算法对其进行滤波和降噪处理,确保获取准确可靠的光强度数据。
2.2 太阳位置计算根据光敏传感器测量到的光强度数据,通过一定的数学模型和算法,可以计算出太阳的位置。
根据太阳位置的变化规律,可以判断出太阳的相对方位和倾角,从而确定太阳能电池板的调整方向。
2.3 步进电机控制根据太阳位置计算的结果,通过单片机输出的脉冲信号和相位控制信号,控制步进电机按照设定的步进角度和方向调整太阳能电池板的位置,使其始终面向太阳。
基于嵌入式系统的帆板控制系统设计与实现

基于嵌入式系统的帆板控制系统设计与实现帆板控制系统是目前广泛应用于太阳能发电领域的一种重要设备。
随着嵌入式系统技术的快速发展,帆板控制系统也逐渐向嵌入式系统平台迁移。
本文将通过设计与实现一个基于嵌入式系统的帆板控制系统,来满足任务中所描述的功能需求。
一、引言帆板控制系统用于控制太阳能电池板的角度和方向,以最大化太阳能的收集效率。
传统的帆板控制系统常采用手动或机械控制方式,但这种方式存在效率低、易受环境影响等问题。
基于嵌入式系统的帆板控制系统通过使用传感器和执行器,实现对帆板角度的自动控制,提高了系统的响应速度和准确性。
二、系统设计与实现1. 硬件设计基于嵌入式系统的帆板控制系统的硬件设计包括传感器选择、执行器选择和控制器设计。
为了实时获取太阳位置以及周围环境信息,我们选择了光敏传感器和倾斜传感器。
光敏传感器用于检测太阳位置,可以通过测量光强度的变化来确定太阳的方向。
倾斜传感器用于检测帆板当前的倾斜角度,可以实时监测帆板的倾斜情况。
执行器选择方面,我们选择了舵机作为帆板角度调整的执行器。
舵机具有结构简单、响应速度快、定位准确等优点,非常适合用于帆板控制系统。
控制器方面,我们选择了一款高性能的嵌入式系统芯片作为中央处理器。
该芯片具有强大的处理能力和丰富的接口资源,可以满足帆板控制系统的各项需求。
2. 软件设计基于嵌入式系统的帆板控制系统的软件设计涉及到实时数据采集、数据处理和控制算法的实现。
数据采集方面,我们利用传感器采集到的光强度和倾斜角度数据进行实时采集,并通过接口将数据传输给控制器。
数据处理方面,我们使用滤波算法对得到的原始数据进行去噪处理,提高数据的准确性。
然后,根据采集到的太阳位置信息和帆板当前的倾斜角度,计算出帆板应调整的角度。
控制算法方面,我们采用PID控制算法对帆板角度进行调整。
PID控制算法通过比较帆板应调整的角度和当前角度的差异,计算出控制指令,并将指令传输给舵机执行器,实现对帆板角度的自动调整。
太阳能跟踪系统设计

太阳能跟踪系统设计摘要太阳能作为一种可以永续使用的绿色可再生能源,有着巨大的开发应用潜力。
但由于光伏电池的输出特性与外界环境因素的变化有很大关系,目前大规模量产的光伏电池光电转换效率仍然不高且价格昂贵。
光伏发电自动跟踪装置是提高太阳能利用率,降低光伏发电成本的有效途径。
研究精确的太阳跟踪装置,可使光伏电池板接收到更多的太阳辐射能量,增加发电量。
本文实现了用廉价的光敏元件和单片机电路进行太阳跟踪的功能。
分析了太阳运行规律,在对比目前常用跟踪方法的基础上,改进了以往的跟踪方式。
提出将光电跟踪作为主要跟踪方式,视日运动轨迹跟踪方式作为特殊天气情况下补充跟踪方式的方案。
通过两种跟踪方式互补,一方面可以充分发挥光电跟踪准确性高的优势,另一方面在阴天等天气条件下仍能实现跟踪。
此外,为了确保跟踪的结果准确,在方位角和高度角调整之后,增加了一组传感器电路进行跟踪结果的验证。
通过对控制系统所实现的功能分析,论文完成了跟踪系统的硬件和软件设计。
主要内容包括:单片机接口电路设计、光强检测电路设计、控制执行部件设计以及光电跟踪和视日运动轨迹跟踪模块的软件设计。
完成了跟踪系统试验装置的制作。
本文所设计的光伏发电自动跟踪系统结构简单,成本低廉,运行稳定,可广泛应用于并网和离网光伏发电系统。
关键词光伏发电,单片机,光强检测,自动跟踪I沈阳工程学院毕业设计(论文)AbstractThe solar energy has ail enormous developing application capacity as one kind of green renewable energy source which Call be continuously used forever.But there is tremendous relationship between photovoltalc cellsoutput characteristies and the change of external environmental factors,currently the efficiency of PV cells is not only low but also expensive on a large scale of production.The photovoltaic automatically tracking device can raise the solar energy utilization rate and bring down the cost of the solar electrical energy generation.Precise solar tracking mechanism can make solar panel receive more radiant energy and increase generating capacity.This paper makes to realize the function of sun tracking.Use of cheap photo sensors and MCU circuit.Analyzed the law of the sun, compared the current tracking methods,and improved the previous tracking mode.Proposed electro opticaltracking as the major tracking mode while the sun trajectory tracking mode as additional tracking mode on unusual weather conditions.Through two complementarytracking modes,on the one hand,electro-optical tracking can give play to the advantages of high accuracy;on the other hand,the system can still achieve tracking on cloudy weather conditions.In addition,In order to guarantee that the track result is accurate.after azimuth and elevation angle adjustment,increased a group of sensor electric circuit to CatTy on the track result confirmation.Through the implementation of functional analysis of control system,the thesis completed hardware and software design of the tracking device.Include:MCUinterface cuit design,optical detector circuit design,control and implementation component design and the software design of electro―optical tracking and sall trajectory tracking module.The tracking system test equipment manufacture is completed.The experimental results showed that,the system could fully realize the tracking of the sun.Finally,proposed improvement program and new method to treat fast cloud according to thetracking effect of the trial.In this paper,the designs of photovoltaic automatic tracking device have simple structure,low cost and stable operation.The device cail be widely applied to grid and off-grid PV power system.Keywords photovoltaic,MCU, light intensity detect, automatictrackingII太阳能跟踪系统设计目录摘要 ........................................................................... .. (I)Abstract ..................................................................... ...............................................................II 1 引言 ........................................................................... ............................................................1 1.1 光伏发电的特点 ........................................................................... ..............................1 1.1.1 光伏发电的优点 ........................................................................... .....................1 1.1.2 光伏发电存在的问题 ........................................................................... .............1 1.2 光伏发电自动跟踪技术 ........................................................................... .................2 1.3 本文主要完成的工作 ........................................................................... .....................2 2 太阳跟踪方法及策略 ........................................................................... .............................3 2.1 太阳运动轨迹对太阳能发电的影响 (3)2.1.1 太阳赤纬角 ........................................................................... ..............................3 2.1.2 计算太阳高度和太阳方位 ........................................................................... ....4 2.2 太阳运动轨迹的跟踪方式 ........................................................................... ............5 2.2.1 单轴跟踪 ........................................................................... ...................................5 2.2.2 双轴跟踪 ........................................................................... ...................................6 2.2.3 视日运动轨迹跟踪与光电跟踪相结合 .........................................................6 2.3 控制系统总体设计.....................................................................................................7 2.3.1 控制系统所要实现的功能分析 (7)2.3.2 控制系统的工作过程 ........................................................................... .............8 2.3.3 机械执行装置 ........................................................................... ..........................8 3 自动跟踪系统的硬件设计 ........................................................................... .................. 10 3.1 控制系统硬件总体设计 ........................................................................... .............. 10 3.2 控制系统核心部件的选择 ........................................................................... ......... 11 3.3 光强检测电路设计 ........................................................................... ...................... 13 3.4 单片机接口电路设计 ........................................................................... .................. 15 3.4.1 电源电路 ........................................................................... . (15)III沈阳工程学院毕业设计(论文)3.4.2 串口通信电路 ........................................................................... ....................... 16 3.4.3 模拟量转换电路 ........................................................................... .................. 17 3.4.4 看门狗和晶振 ........................................................................... ....................... 18 3.4.5 实时时钟电路 ........................................................................... ....................... 19 3.5 控制执行部件设计 ........................................................................... ...................... 20 3.5.1 步进电机驱动控制系统 ........................................................................... ..... 20 3.5.2 本系统所采用的步进电机及驱动模块 ...................................................... 21 3.6 整体电路图的设计 ........................................................................... ...................... 22 4 系统软件流程及调试 ........................................................................... .......................... 24 4.1 主控制模块的软件设计 ........................................................................... .............. 24 4.2 光电跟踪模块程序设计 ........................................................................... .............. 25 4.3 视日运动轨迹跟踪模块程序设计 (26)5 结论 ........................................................................... ......................................................... 27 6 致谢 ........................................................................... ......................................................... 28 7 参考文献 ........................................................................... ................................................ 29 8 附录 ........................................................................... (30)IV太阳能跟踪系统设计1 引言1.1 光伏发电的特点1.1.1 光伏发电的优点光伏发电技术(Photovoltaic)是将太阳能转化为电能的技术,其核心是可释放电子的半导体物质。
设计模板:太阳能发电太阳跟踪系统的设计

太阳能(Solar Energy),一般是指太阳光的辐射能量。
自地球形成生物就主要以太阳提供的热和光生存。
随着地球上有限能源被不断的开采,当今世界面临的最大问题之一就是能源危机。
石油能源,碳能源,海洋能源等各种有限能源在不断减少,同时也带来了相应的环境污染。
要解决这些问题的必然之路就是开发和利用新型无污染能源。
然而目前太阳能光伏电站效率低,发电成本高,直接制约光伏发电产业的大规模推广,提高太阳能光伏电站效率已成为光伏发电产业的基本要求。
本设计针对如何提高太阳能发电效率的问题,提出了采用自动跟踪的方法,让自动跟踪系统对太阳的运动轨迹作出实时判断,从而使太阳能电池板实时和太阳光线保持垂直,提高太阳能发电的效率。
跟踪太阳的方法可以概括为两种方式,光电跟踪和根据视日运动轨迹跟踪。
前者是闭环的随机系统, 后者是开环的程控系统。
同时对两种太阳跟踪方式进行理论分析。
本课题设计的自动跟踪式太阳能光伏发电系统,实现了对太阳的自动跟踪,使太阳能电池板基本对准太阳垂直入射的方向,并实现了连续稳定的电能输出,保证用电负载的正常工作。
关键词:光伏发电自动跟踪发电效率太阳能Solar Energy generally refers to the solar radiation energy. In the modern commonly used for power generation. Since the formation of the earth organism mainly to light and heat provided by the sun live. As the earth limited energy by continuous mining. One of the biggest problems facing the world today is that the energy crisis. Petroleum energy, carbon energy, ocean energy and other finite energy is reducing unceasingly, also brought the environmental pollution. To solve these problems is the way of the development and utilization of new energy without pollution. However, solar PV power station low efficiency, higher cost, directly restricts the photovoltaic industry, large-scale promotion, improve the efficiency of solar photovoltaic power station has become the basic requirements of photovoltaic industry.The design is aimed at how to improve the efficiency of solar power generation problem, puts forward the method of automatic tracking, automatic tracking system to the sun to make real-time judgments of the motion trajectory, thus making the solar panels in real time and sunlight perpendicular, improve the efficiency of solar power.Sun tracking method can be summarized into two ways, photoelectric tracking and trajectory tracking based on visual day. The former is the closed loop of stochastic systems. The latter is an open loop control system. At the same time to two kinds of solar tracking mode intheory analysis.This topic is to design the automatic tracking solar photovoltaic power generation system, to achieve automatic tracking sun, so that the solar panel is substantially aligned perpendicular to the sun incident direction, and realize continuous and stable power output, to ensure the normal work of electric power load.Key words:solar photovoltaic generation automatic tracking the efficiency of power generation solar energy目录摘要 (I)Abstract......................................................... I I1 绪论 (1)1.1 太阳能光伏发电的介绍 (1)1.2 太阳能发展的现状 (2)1.3 太阳能自动跟踪技术的研究概况 (3)1.4 本文研究的内容及课题研究的意义 (3)2 光伏发电介绍 (5)2.1 光伏发电 (5)2.2 光伏效应 (5)2.3 光伏电池市场竞争态势 (6)2.4 光伏电池的分类 (6)3 太阳能自动跟踪系统理论 (8)3.1 常用的太阳跟踪方式 (8)3.2 自动跟踪系统的设计原则 (10)3.3 最大功率跟踪技术 (11)3.4 最大功率的跟踪方法 (11)4 自动跟踪系统的设计与实现 (14)4.1 独立太阳能光伏发电系统的结构 (14)4.2 跟踪控制系统总体设计 (15)4.3 嵌入式操作系统的选择 (16)5 自动跟踪的软硬件设计 (18)5.1 硬件整体设计 (18)5.2 微处理单元 (18)5.3 光跟踪单元 (21)5.4 传感器单元 (23)5.5 控制单元 (26)5.6 MPPT电路设计 (29)5.7 跟踪控制系统程序设计 (32)6 结论与展望 (35)致谢............................................. 错误!未定义书签。
太阳能自动跟踪器系统设计
太阳能自动跟踪器系统设计摘要:人类正面临着石油和煤炭等矿物燃料枯竭的严重威胁,太阳能作为一种新型能源具有储量无限、普遍存在、利用清洁、使用经济等优点。
但是太阳能又存在着低密度间歇性空间分布不断变化的缺点,这就使目前的一系列太阳能设备对太阳能的利用率不高,太阳能自动跟踪装置解决了太阳能利用率不高的问题。
采用光线自动跟踪的方式,使太阳能电池板的朝向始终精确跟随太阳位置的变化,保持太阳能电池板表面与太阳光垂直,这样会大大提高发电效率。
本文主要介绍太阳能跟踪控制系统的设计,该控制系统具有结构简单、稳定性好、精度高的特点。
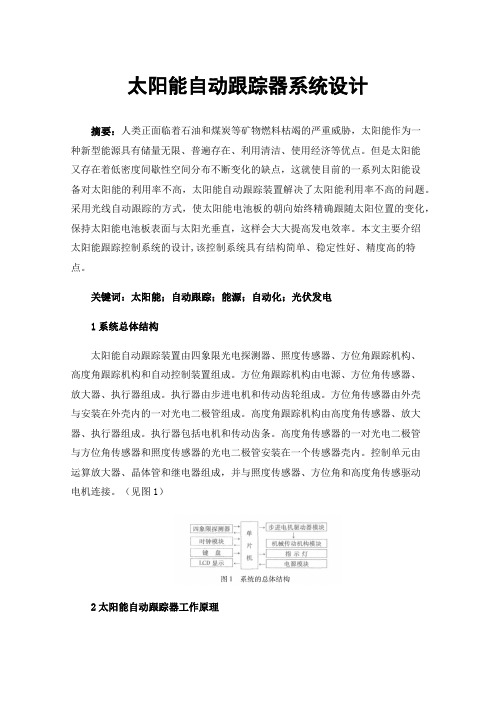
关键词:太阳能;自动跟踪;能源;自动化;光伏发电1系统总体结构太阳能自动跟踪装置由四象限光电探测器、照度传感器、方位角跟踪机构、高度角跟踪机构和自动控制装置组成。
方位角跟踪机构由电源、方位角传感器、放大器、执行器组成。
执行器由步进电机和传动齿轮组成。
方位角传感器由外壳与安装在外壳内的一对光电二极管组成。
高度角跟踪机构由高度角传感器、放大器、执行器组成。
执行器包括电机和传动齿条。
高度角传感器的一对光电二极管与方位角传感器和照度传感器的光电二极管安装在一个传感器壳内。
控制单元由运算放大器、晶体管和继电器组成,并与照度传感器、方位角和高度角传感驱动电机连接。
(见图1)2太阳能自动跟踪器工作原理太阳能自动跟踪装置采用四象限光电探测器,该器件实际由四个光电探测器构成,每个探测器一个象限,器件由于象限化,当太阳光辐射到器件各象限的辐射通量相等时,各象限输出的光电流相等。
而当光线发生偏移时,象限辐射量的变化将引起各象限输出光电流的变化,由此可测出太阳的方位并实现跟踪。
跟踪方式采用光电跟踪与太阳视日运动轨迹跟踪相结合,可加强系统的稳定性,步骤如下:步骤1 通过太阳视日运动轨迹跟踪,将系统带入一个预知的足够小的范围内,再启动光电跟踪或视日运动轨迹跟踪。
步骤2 开机后光电检测电路检测白天还是黑夜。
当检测为黑夜时系统停止运行;若检测为白天,系统进行初始化。
太阳能跟踪系统设计--课程设计

2010 - 2011学年第1学期专业综合设计报告题目:太阳能跟踪系统设计专业:电子信息工程班级:姓名:指导教师:成绩:电气工程系2010年10月21日课程设计任务书学生班级:学生姓名:学号:设计名称:太阳能跟踪系统设计起止日期:2010.10.18-2010.10.24 指导教师:摘要:随着社会经济的快速发展,人类所面临的能源问题越来越突出,太阳能作为一种清洁能源,无疑受到各国的普遍重视。
如何提高太阳能的利用效率成为研究热点,太阳跟踪是提高利用率的一种途径。
目前太阳跟踪的方式有多种,主要有光电式和机械式。
前者为被动跟踪,受环境影响较大,尤其在多云或阴天时;后者为主动式,其原理是通过程序计算出太阳位置,控制步进电机跟踪太阳;目前国内大多数采用后者的方式。
但这种跟踪方式会存在累积误差,主要原因是采用的太阳位置坐标模型不够精确;由于是开环控制,机械结构变形及电机在执行过程中产生的误差难以消除,跟踪的精度随运行时间的增加而降低。
本文采用基于32 位ARM 公司的嵌入式微控制器LPC2290 构建平台,采用以程控跟踪为主、光电跟踪为辅的跟踪方式,同时更新了计算太阳坐标位置的数学模型,从而提高了跟踪精度,实现了全自动跟踪,对于实现大型太阳能热发电具有重要意义。
如下面的太阳能跟踪器实例。
目录设计要求 (1)摘要 (2)1 太阳能跟踪系统的功能与结构 (4)1.1 系统组成及结构 (4)1.2 系统功能 (4)2 太阳能跟踪系统的设计与实现 (5)2.1 AR M处理器 (5)2.2 液晶显示模块 (5)2.3 存储模块 (5)2.4 光电检测模块 (6)2.5 执行机构 (7)2.6 太阳坐标模型 (7)3 软件设计 (7)3.1 操作系统移植 (7)3.2 应用程序设计 (8)参考文献 (9)自我评价 (10)太阳能跟踪系统设计1 太阳能跟踪系统的功能与结构1.1 系统组成及结构智能型太阳能跟踪装置主要由微处理器控制单元、光电检测单元、液晶显示模块、存储单元和键盘及相应的外围电路、手动控制单元等组成,如图1 所示。
GPS授时与卫星定位技术在太阳跟踪系统中的应用

( 成都钟 顺科 技发 展 有 限公 司 , 成 都 四川
摘
60 4 ) 10 1
要 : 用 太 阳跟 踪 系统能 大 大地提 高太 阳能 电池板 的光 电转 换 效率 , 文采 用 G 8 采 本 S一 7模
块, 取得 当地经纬度和时间, 然后根据天文轨迹算法, 精确计算出太阳的定位跟踪参数 , 即高度角和
装 , 电池板 固定 在某 个位 置 , 随太 阳位 置 的变化 即 不
而移 动 , 也严 重影 响光 电转 换 效 率 , 测 算 : 果平 据 如 板发 电系统 与 太 阳光 线 角 度 存 在 2 。 差 , 会 因 5偏 就 垂直 人射 的辐射 能减少 而 使光伏 阵列 的输 出功率 下 降 1% 左 右 。因 此 , 用 全 自动太 阳 跟 踪 系 统 , 0 采 有 效地 保证 太 阳能 电池 板 能 够 时 刻 正对 太 阳 , 发 电 使 效率 达 到最佳 状 态 , 对解 决 能源 危 机 有 着 十 分重 要
Z HA in F NG u 0 La g, E J n—su i W ANG Ta h a, in—x , E h n iZ NG Z o g—l i
( h n d S N S i c n eh o g e e p e t o Ld C e g u6 0 4 , hn ) C eg uZ U ce eA dT cn l yD vl m n C . t , h n d 10 1 C ia n o o
方位 角 , 而得 出太 阳的准确 位 置 , 从 实现 太 阳轨 迹 的跟踪 。
关键 词 : P G S授 时 ; P G S定位 ; 阳跟踪 系统 ; 太 天文轨 迹 算法 中图分 类号 : K 1 T S3 文献标 识码 : A 文章编 号 :0 2— 3 9 ( 0 1 5— 3 7—0 10 6 3 2 1 )0 0 8 3
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
角度 ,再将其转 化为脉冲信 号 ,通过步进 电机推动电池 板 转到正对太 阳的位置 【 3 ] 。有效改进传统的天文 日立法
累积误差大 、跟踪精度低等缺点。
4 4 信 息系统 工程 l 0 272 21. 0
传感器反馈电池板实际高度 角及方位角 ,角度传感器反 馈 的是模 拟信号 ,需要通过AD 转换 电路转换成数字 信
用数量 14 个 ,可周转数量 8 ,年平均租金 14 元/ 11 7个 9 80
个为输人参数计算 ,如果提升3 %周转效率 ,可以减少 0 租赁设施32 ,每年节约费用 约6 万元 。 4个 3
过程 ,加强监控和追溯 ,降低各类H E s 风险。
e 物流 追踪 和 报 表 功 能 。R M 标 准 功 能 提供 ) L
了较 多 的的物 流 追踪 和 报 表 功能 ,可 实现 基 于 预 留 ( eev t n)、维修工 单 ( M r e )、WB R srai o P O dr S元 素 、转 储 申请 (S R )、采 购 申请 ( R)、运 单 T P
( hp n )、航道 ( o ae S imet V yg )的物流跟踪。通过远程
[AT g 18 4 mea2 中文手册[ . ] M】
所用硬件 ,对硬件分析后画 出了主要硬件的电路 图并完 成 了跟踪控制 系统各部分 的软件设计 ,使该系统更加紧
( 作者单位 :华北 电力大学 网络与信息管理 中心 )
信息系统工程 I 02 1 5 1 2 2 70 0
角 ,利用步进电机推动 电池板转动实时追踪太 阳,提 高 发电效率并有效控制累积误差。
整 。 ( )两路角度传感器 ,用 于实时反馈电池板高度 5
角及方位角。
二 、 GP 定位 系统 S
21 P 工作原理及特点 。G S . S G P 导航系统 的基本原 理
3 系统电路搭建 。系统实时时钟 由P I IS . 2 H LP 公司 的 P F 53 C 8 6 芯片提供 ,其 内含一个实 时时钟/ 日历 ,可 以
司的H E S 管理 目 标影响重大 ,也是公司社会责任的重要体 现。及时、安全、可靠的回收各类废弃物和危险品,是海
上物流管理的重点工作之一。应增强系统对规范废弃物/ 危险品的回收管理的功能支持 ,全过程记录并跟踪其运输
装箱等 )积压严重现状 ,提7设施周转率 ,节省设 施租
用成本 。以某下属单位 目前周转设施可用率6.4 99 %,租
单 片机的 串 口脚T D和R D端 口。系统采用两路角 度 X X
22 阳跟踪方案选择 。本系统采用改 良的天文 日 .太
立法 ,利用G S P 定位准确 、精确授时等优点 ,使用G S P 接 收模块定时接 收卫星信号 ,由控制系统读取太阳能 电
池板所在经纬度 、日期时间以及海拔高度等参数 ,利用 单 片机实时计算太 阳高度角及方位角 ,通过角度传感器
… 袁 志平. 远程 物流管理在 太钢矿 业信 息 系统 中的应m. 冶金 自
动 化 ,0 23 () 9 3 . 2 1 , 3: — 3 6 2
物流管理模块的物料跟踪功能 ,可跟踪在途物资状况 ,
跟踪集装箱和航道 的运转情况并及时处理 ,清除管理盲
区 ,从而提高整个物流体系的透 明度和可靠性 。但 是这
[ 李天文.P 原理与应用[ 北京: 出版社 , 0. Hale Waihona Puke 】 GS M] 科学 2 3 0
嗍
四 、结束语
本文 介绍 了一种基 于G S P 的嵌入式 太 阳跟踪控 制
系统 。分析了G S P 的工作原理及特点 ,提出了一种利用
G S P 定位 系统定位电池板所在位置 ,计算太 阳方位跟踪
通过串行 接 口与单片机进行通信。P F 5 3 C 86 与单片机之
是测量出已知位置的卫星到用户接收机之间的距离 ,然
后综合多颗卫星的数据就可知道接收机 的具体位置【。 1 】
间能简单 地采用 同步 串行的方式进行通信 ,仅需2 / 根I O 线 :两线接 口的串行数据I 引脚S A、两线接 口的串 / O D
些报表功能多为实 际操作层面的报表 ,与国内石油公司
统计 和考核指标体系存在衔接 的问题。因此需要在利用
R M标准报 表功能管理 和收集各类远程物 流业务信息 L 后 ,根据 国内企业 的管理要求 ,重新定义相关 的业务考
核指标 。再通过系统标准报表 ,或者 白定义报表开发 ,
蛐
形成适应 国内企业管理模式的一整套远 程物流相关的业
,
常规 的 固定太 阳能 电池 板的发 电方式发 电效 率太
低 ,不能充分利用太 阳能资源 ,已经无法满足人们对光
伏发 电转换效率 的要求。本文提出一种 以全球定位系统 ( P 为授 时、跟踪模块 ,以A me a2 单 片机为控 G S) t g 18 制系统核心 的太 阳跟踪控制 系统 ,由G S P 提供高精度定 位及精确授时给控制 系统 ,系统计算太阳高度角及方位
号并连接到单片机。 ( 下转1 5 ) 页 0
E c lN E x 垦 l 旦 经堕窒 x G 里 里 A N
文件监控从来 白 海上设施的退还物料和货柜 ,但对于无物 资编码的大型设备返修以及海上平台废弃物及危险品回收
管理功能的支撑能力 比较欠缺 。因此 ,优化需求如下 :
<
SS R CI 系 实 Y AT E 统 践 P C
基于G SI P I 嵌入式太 阳跟踪 控制 系统设计 :  ̄
◆ 卢 国杰 张银银 甄成 刚
摘要 :通过 分析 总结G S P 定位 系统的技 术特点 ,选择 了太 阳能跟踪 系 统所用方案 ,>Amea2 单片机为核 心,实现 了对 太阳的主动跟踪 ,以提 7 t g 18 , 高发 电效率 ;系统通过提 取G S P 实时数据 ,计算太 阳高度 角及方位 角,再 通过角度 传感器反馈 太阳能电池板位置 ,驱动步进 电机 对电池板 方位进行 调 节 ,从而跟踪太阳 ;完成 了太阳跟踪控制 系统的硬件设计及软件设计。 关键词 :太阳能 ;G S P ;自动跟踪 ;Amea2 ;控制 系统 t g18
行数据时钟I 引脚 S L / o C 。 U N 03 L 2 0 驱动芯片用来对步进 电机进行驱动 ,提供
G S P 导航 系统 卫星部 分 的作 用就是 不断地 发射导航 电 文 ,用户接收到导航 电文时 ,提取 出卫星时间并将其与
自己的时钟做对 比便可得知卫星与用户的距离 ,再利用
导航电文中的卫星星历数据推算出卫星发射电文时所处 位 置 ,用 户在WG .4 S8 大地坐标 系中的位置速度等信息
便可得知 。 J
步进电机所需要 的脉冲 ,采用两个四相步进 电机 ,分别
对高度角和方位角进行跟踪 。通常单片机驱动U N 0 3 L 2 0
芯片时 ,上拉2 的电阻 比较合适 ,本系统也采用2 的电 k k 阻作 为上拉 电阻 ,同时. C VC 脚接VC C电源 ,U N2 0 L 03 的脉 冲输入端接A m g1 8 T ea 2单片机的5 / 端 口。 个I O GS P 开发模块G t s9 T g 18 s r 8 同A me a2 单片机【 ag 通过 TL T 电平串 口相连 ,由单片机给其供 电,只需要四根 杜 邦 线即可 :两根接5 V电源供 电脚VC 和G C ND、两根 接
务分析报表和考核报表 ,支持各级管理人员和公司领导
进行绩效评估 、业务优化及管理决策工作 。
[ 何诗兴, 学梅, 2 ] 邵 张吾胜. 马钢信息化 系统 集成 分析与探讨[ . 7冶 1
金 自动 化 , 1,51: — 7 2 1 () 3 2 . 0 3 2
【1 马斯 ・ 3托 科蓝 , 安德鲁 ・莱德.A s P业务蓝 图: 解供应链 管理 理
3返 回物资损耗 :实现从返 回需求至再储备等全流 .
程可视化追踪 ,控制返 回业务中的货损风险 ,通过对返
修返检物资的有效管理 ,提高物资再使用率 。
4转储运输成本 :提 升 台与基地 间的计划传 递效 . F 率 ,减少转储运输车次 、节约运输成本。 通 过对 S L APR M解决方案 ,使 我们可 以理解海 上 石油平 台远程物流的国际最佳实践 ,深刻认识 国内外业 务的差别 ,国际业务发展趋势 ,以及 国内外现有水平的 差距 。对 国内海 上石油远 程物流业 务 的优 化改进 以及 SP A 系统 的深化应用具有积极 的意义 和实用价值 。 参考文献
【】 2 刘基 余. S ̄ 星导航 定位 原 理与 方 法[ . GP - - - M】北京: 学 出版 科
社 ,0 3 20.
太 阳的方法 ,用少量的外 围硬件构成 了一个性 能完善 的
系统 ,并确定 了系统所用跟踪方案 ;确定 了系统各部分
【 赵争明, 3 】 刘建政 ,、 予 晓英, 太 阳能光伏 电及其应用 f 北京: 】 等. j . 科 学出版社,0 5 20.
,
>
况 ,实施R M系统 ,可 以降低 库存成本 、提高物资周 L
转效率 、降低库存积压资金 、改善财务状况 ,并最终提 升公司运营业绩 ,具体表现在 : 1库存指 标 :优 化MR 应用 、加快 库存周 转 、降 . P 低物 资积压成 本 。以现有库存年周转率3 ,年平均库存 金额2 亿元 ,年 出库金 额6 亿元计算 ,提高 1 %库存周转
四 、应 用效 益预测
通过S L APR M实施与研究 ,结 合 国际公 司应用情
【 . M] 朱岩, 肖勇波译. 北京: 中国人 民 学 出版社, 0 . 2 3 0
( 作者 单 位 :中 国海 洋: 总公 司 信 息 技术 中心 ) 石油