研究实验10——模糊神经网络与模糊控制的算法研究
基于模糊神经网络控制的电液系统研究

Re e c n e t o h dr u i r o Sy t m s d o s ar h o El c r - y a lc Se v se Ba e n Fuz y Ne r lNe wo k Co r l z u a t r nt o
H0U Yu no g. C a ln HEN Jl i n i
( e at n o M ca i l nier g aj gU i r t o c neadT cn l y aj g20 9 ,C ia D pr t f eh nc g e n ,N ni n e i f i c n eh o g ,N ni 10 4 h ) me aE n i n v sy S e o n n
变 的被 控对象具有 较强 的 自适应 和 自学 习能力 ,且
用 。但 B P网络存在局部最 优问题 ,并且 训练速度 较 慢 、效率低 ,将其应用在快速 、动态变化的电液伺 服
系统 中存在 着训练 和收敛 速度 问题 。B P算 法采用 的
是梯度最优法 ,因此可 以通过修改权值使误差 向减小 的方向变化 。但是 由于误差训练 式 中含 有 因子 ( 一 1
侯 远 龙 , 陈机 林 ( 南京理 工大 学机 械 工程 学院 , 南京 20 9 ) 10 4
摘要 :针对大功率 电液伺服系统存在严重非线性 和时变性 ,将神 经网络与模糊控制 理论相结合 ,根 据系统 的误差 及误 差变化对神经 网络的学 习速率和动量因子进行模糊 修正 ,有 效地 改善 了神经 网络 的学习速率 。实验表 明 ,所设计 的神 经 网 络控制器能够保证大功率电液伺服系统的静 、动态性能 。 关键词 :模糊 ;神 经网络控制器 ;电液伺服系统
《智能控制》-模糊控制实验报告

课程名称:智能控制实验名称:模糊控制一、实验目的:(1)了解在Simulink 仿真环境下建立控制系统方框图的方法,熟悉Matlab 和Simulink 仿真环境(2)掌握模糊控制器的设计方法。
(3)比较PID 控制和模糊控制的特点。
二、实验内容和步骤 已知s e s s s G 2.0214820)(-++=,分别设计PID 控制与模糊控制,使系统达到较好性能,并比较两种方法的结果。
结构如下图。
(1)模糊控制规则设计针对该定位系统,设计二维模糊控制规则,使性能达到最佳。
模糊控制规则如下:(2)设计未加PID或FUZZY控制器时,设计系统如下:输入阶跃信号,观测与分析仿真结果。
(3)加入PID控制器如下:对应的仿真结构图为:调整参数,观测与分析仿真结果。
PID控制的仿真曲线如下:(4)设计FUZZY控制器在simulink仿真环境下,设计模糊控制系统,包括模糊控制规则、隶属函数、比例因子、量化因子、论域等参数设计。
FUZZY控制仿真结构图如下:其中黄色部分具体为:利用simulink设计的模糊控制的仿真结构图为:其中对于模糊控制器的设计:E=[-6 6] EC=[-6 6] U=[-6 6],并且其隶属函数分别为:E的隶属函数EC的隶属函数U的隶属函数再将其中一个学生的比较好的实验结果作为参考实例:首先仿真图如下:模糊控制器的设计:E=[-6 6] EC=[-6 6] U=[-6 6],并且其隶属函数分别为:E和EC的隶属函数U的隶属函数控制规则:ECNB NM NS ZE PS PM PB ENB PB PB PB PB PM ZE ZENM PB PB PB PB PM ZE ZENS PM PM PM PM ZE NS NSZE PM PM PS ZE NS NM NMPS PS PS ZE NM NM NM NMPM ZE ZE NM NB NB NB NBPB ZE ZE NM NB NB NB NB设计好模糊控制器后,运行仿真图形,得到的仿真曲线如下(step time=1):模糊控制的仿真曲线由仿真可知,通过选择合适的PID参数可以达到较好的控制性能。
fuzzy_control模糊控制算法
模糊逻辑跟踪控制
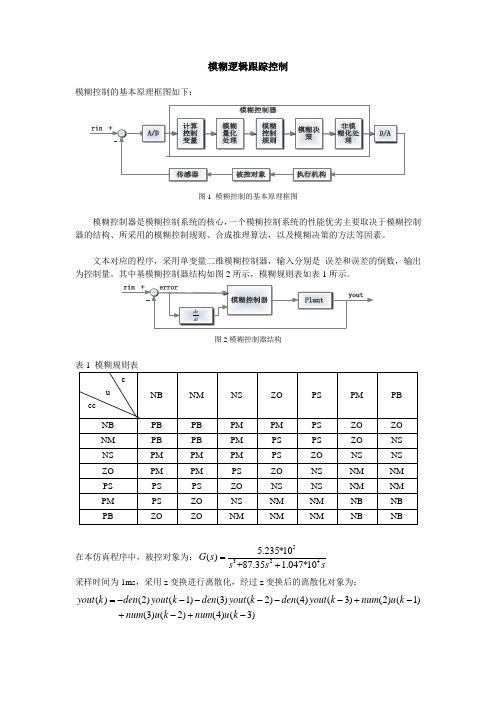
模糊控制的基本原理框图如下:
图1 模糊控制的基本原理框图
模糊控制器是模糊控制系统的核心,一个模糊控制系统的性能优劣主要取决于模糊控制器的结构、所采用的模糊控制规则、合成推理算法,以及模糊决策的方法等因素。
文本对应的程序,采用单变量二维模糊控制器,输入分别是 误差和误差的倒数,输出为控制量。
其中基模糊控制器结构如图2所示,模糊规则表如表1所示。
de dt
图2模糊控制器结构
表1 模糊规则表
在本仿真程序中,被控对象为:5
3245.235*10()+87.35 1.047*10G s s s s
=+
采样时间为1ms ,采用z 变换进行离散化,经过z 变换后的离散化对象为:
()(2)(1)(3)(2)(4)(3)(2)(1) (3)(2)(4)(3)
yout k den yout k den yout k den yout k num u k num u k num u k =------+-+-+-
其中,反模糊化采用“Centroid”方法,方波响应及控制器输出结果如图3和图4所示:。
基于混合学习算法的模糊小波神经网络控制

第3 卷 第2 3 期
2 00 6年 4月
湖 南 大 学 学 报 (自 然 科 学 版 )
Junl f n nUnvrt( trl c n e) ora o a i sy Na a S i cs Hu ei u e
关键词 : 模糊神经 网络 ; 小波; 遗传算法; P算法 B
中图分类 号 : 2 TP 4 文献标 识码 : A
Fu z a ee u a Newo k n r l z y W v ltNe rl t r sCo to
Ba e n Hy rd Le r i g Al o i m s d o b i a n n g rt h
t nrsl h we h ttent r o l cnrl iee t bet ef t e ,a d h d tec aatr t so i ut so d tc f ci l n a h h rc i i f o e s o df o s e vy e sc
s e dn s n d p a it p e iesa d a a t bl y. i
Ke r s f zy n u a n t r ywo d :u z e rl ewo k;wa ee ;g n t lo i m;BP ag rt m v lt e ei ag rt c h lo i h
P NG J —h , A E i z u W NG Ya —a , UN e n on n S W i
{ol e f l tcl n fr ai n ier g u a nv C a gh - n n 4 0 8 。 hn ) C lg e r a adI om t nE gnei -H nnU i- hn saHu a 1 0 2 C ia e o E ci n o n Ab ta t Usn v ltb s u cin a m b rhp f n t n, fz y c n r la d n u a n t r r sr c : ig wa ee a i f n t s me es i u ci s o o u z o to n e rl ewo k wee c mbn d。a d t efzy ifrn ewa e l e y n u a ewo k.To c u tr c h ee t fBP ag rt m o ie n h u z n ee c srai d b e rln t r z o n ea tt e d fcso lo ih
模糊神经网络技术在电梯群控系统中的应用研究

2 模糊 神 经 网络的 模式 识别 .
( )确 定模 式特征 1 B 算 法 的学 习过程 是 由正 向传 播 和 反 向传 播组 成 ,在 正 向 P 传 播 过程 中 ,输 入 信号 从 输 入 层经 隐层 逐层 处理 ,并传 向输 出 层 ,每 一层 神 经 元 的状 态 只 影 响下 一 层 神经 元的 状 态。 如 果在 输 出层 不 能得 到 期 望 的输 出 ,则转 入 反 向传 播 ,将输 出信 号 的 误 差 沿原 来 的连 接通 路返 回 ,通过 修 改 各层 神 经 元 的权 值 ,使 得 误差 信号 最小 。输 出误 差评 价 函数 为:
1 NN5 ^l 2
E T (—k1, (式 ) =  ̄Y Y 公 1 k )
一 K =1
舰 则层
.
,
其中式,期望输出向量和实
,
图 1 模 糊神 经 网络
际 输 出 向量 ,N 5 样本 的个 数 , N为 即神经 元的 个数 。 学 习过 程如
神经网络PID在PLC系统控制中的应用研究

1 引 言
可编程控制器 …称 作可 编程逻辑 控制 器 ( rga m be Porm al LgcC nr l ) 它 主 要 用 来 代 替 继 电 器 实 现 逻 辑 控 制。 oi ot l r , oe P C是一种 以微处 理器 为基 础 的通 用工 业 自动 控制 装 置。 L
最 后 本 文将 该 算 法 应 用 到 P C系 统 控 制 中 , 真 结 果 表 明 了 L 仿
P C在设计 、 L 结构方面具有许多其它控制器所无法 比拟 的优
点, 然而其故障诊 断能力 却非 常弱 , 了 自诊 断功 能外 ,它 除 没有专门的用于故障诊 断的软件和硬件 。 目前虽 然传统的 P C控 制系统都有 一定 的较 成熟 的控 L 制方案 , 采用常系数的 PD算法控制器可 以取得较 为满意 的 I
KE YWOR :rg mm bel i cn o e ( L ; erlntok F zycnr ; I l rh DS Por al o c ot l rቤተ መጻሕፍቲ ባይዱP C) N ua e r ; uz ot lPD a oi m;Lvlcsae a g rl w o g t ee acd
但是 由于传统的 PD算法该算 法在 系统 中难 以确定精 I 确的数学模 型 , 使得系统参数设 定困难 , 对该缺 陷, 针 本文提 出了改进 的 PD算法 , PD算法 、 I 将 I 模糊 控制算法 以及神 经 网络算法相结 合 , 形成 了一种 智能 控制算 法 . 实现神 经 网络 与 PD控制 规律 的本 质结 合 ,共 同完 成 PD 自适 应 调节 。 I I
摘要 : 针对传统的 PD算法 由于难以给出精确 的数学模型 , I 使得系统参数设定 困难 , 同时系统控制效果上存 在一定 的缺 陷 , 造成系统安全性和可靠性降低 , 系统控制质量不高 。为 了解决传统的 PD算法所带 来的问题 , I 提出 了基于模 糊神经 网络 的 PD算法 , PD算 法 、 I 将 I 模糊控制算法以及神经 网络算 法相结合 , 成了一种智 能控制算法 。将算 法应用 在 P C控制 系统 形 L 中, 实验表明算法有效的实现 了 PD参数的 自整定 , I 并且提高 r控制质量 , 具有一定的实际应 用推广价值。 关键词 : 可编程逻辑 控制器 ; 神经网络 ; 模糊控制
模糊神经网络的基本原理与应用概述

模糊神经网络的基本原理与应用概述摘要:模糊神经网络(FNN)是将人工神经网络与模糊逻辑系统相结合的一种具有强大的自学习和自整定功能的网络,是智能控制理论研究领域中一个十分活跃的分支,因此模糊神经网络控制的研究具有重要的意义。
本文旨在分析模糊神经网络的基本原理及相关应用。
关键字:模糊神经网络,模糊控制,神经网络控制,BP算法。
Abstract:A fuzzy neural network is a neural network and fuzzy logic system with the combination of a powerful. The self-learning and self-tuning function of the network, is a very intelligent control theory research in the field of active branches. So the fuzzy neural network control research has the vital significance. The purpose of this paper is to analysis the basic principle of fuzzy neural networks and related applications.Key Words: Fuzzy Neural Network, Fuzzy Control, Neural Network Control, BP Algorithm.1人工神经网络的基本原理与应用概述1.1人工神经网络的概念人工神经网络(Artificial Neural Network,简称ANN)是由大量神经元通过极其丰富和完善的联接而构成的自适应非线性动态系统,它使用大量简单的相连的人工神经元来模仿生物神经网络的能力,从外界环境或其它神经元获得信息,同时加以简单的运算,将结果输出到外界或其它人工神经元。
基于模糊神经网络的直接转矩控制系统研究

Mal t b建 立 仿 真模 型 , 果 表 明 : 提 出 的新 方 法 在 一 定 程 度 上 改 善 了 感 应 电 动 机 的 低 速 性 能 , 小 了 转 矩 a 结 所 减
脉 动 , 有 良好 的 动 态 响 应 和 自适 应 能 力 。 具
关键词 : 转矩 脉 动 ; 糊 神 经 网络 ; 散 电压 空 间矢 量 ; 模 离 自适 应
1 引 言
如 今 在 交 流 传 动 领 域ຫໍສະໝຸດ , 接 转 矩 控 制 技 术 直
( iet oq ec n rlDT 以 它 新 颖 的 控 制 思 drc r u o to , C) t
高系统的鲁棒性。
2 传 统 直 接 转 矩 下 的 控 制 原 理
E E TR C D 1 2 1 Vo. 2 NO 6 L C 1 R VE 0 2 14 .
电 气 传 动 2 1 0 2年 第 4 2卷 第 6 期
基 于模 糊 神 经 网络 的直 接 转 矩 控 制 系 统研 究
张 广 远 , 文 生 , 旭 阳 刘 王
( 大连 交通 大学 电气信 息 学院 , 宁 大连 1 6 2 ) 辽 10 8
摘 要 : 统 的 直 接 转 矩 控 制 方 法 采 用 离 散 的两 点式 调节 器 , 节 电机 磁 链 和 转 矩 大 小 , 易 引 起 磁 链 和 转 传 调 容 矩 脉 动 。提 出 了一 种 基 于 Ta ai u eo型 模 糊 神 经 网络 控 制 的新 方 法 , 方 法 是 将 模 糊 控 制 与 神 经 网络 相 kg— gn S 该 结 合 , 立 模 糊 神 经 网 络 控 制 器 , 通 过 离 散 电 压 空 间 矢 量 计 算 补 偿 电压 , 提 高 电 机 的 控 制 性 能 。 最 后 通 过 建 并 来
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
研究实验10——模糊神经网络与模糊控制的算法研究
一.研究问题描述:
用模糊控制的方法对含有噪声的不稳定二阶系统进行控制,并与PID方法
的控制结果进行比较。系统离散化方程为:
()0.36(1)0.132(2)0.117(1)0.076(2)()ykykkukukvk
二、要求
1、模糊神经网络结构的选择、实现及其影响的仿真与分析;
2、所用算法的理论描述和程序流图;
3、算法中参数选择的影响分析与仿真;
4、仿真结果的分析与说明。
说明:如果选择Matlab作为仿真工具,在网络结构选择、Matlab可控制参数的
选择方面需要做仔细研究;如果选择C++或Java等语言,要就算法流程和程序
清单,以及参数变化的分析。