风力发电的变桨距控制研究
基于模糊PID的风力发电机组变桨距控制研究
基于模糊PID的风力发电机组变桨距控制研究作者:田强来源:《现代电子技术》2013年第16期摘要:为了提高变桨距控制系统对风力发电机组的跟踪控制精度,同时避免局部极小值问题,针对常规PID控制难以实现风力发电机组控制效果,首先建立了风力发电机组变桨距的动态模型,在分析风力发电机组变桨距控制要求的基础上,提出了一种基于模糊PID的变桨距控制方法。
该方法将模糊与PID相结合这样有效的弥补常规PID的不足。
在随机风作用下对机组的模糊PI控制器进行仿真,仿真结果表明该模糊PI控制器具有良好的动态性能及对风速扰动的鲁棒性,能够有效改善风力发电机组的变浆距系统控制效果。
关键词:风力发电机组;变桨距控制;模糊PID;变速恒频中图分类号: TN710⁃34; TP273 文献标识码: A 文章编号: 1004⁃373X(2013)16⁃0146⁃030 引言风力发电是一种清洁、绿色、无污染的可再生新能源,近几年风力发电得到了快速的发展。
目前大型风力发电机组普遍采用变桨距控制系统,变桨距风机能够提高风机的风能利用系数以转换最大的风能[1]。
当风速达到额定风速以上时,采取变桨距控制策略,通过改变叶片的迎风角度以改变气流对风力机的作用面积,使发动机输出功率维持在允许范围内。
模糊(Fuzzy)控制是一种新颖的控制策略,其最大的特点是利用专家经验或相关控制经验建立语言控制规则,无需精确数学模型就可由控制器执行其功能[2]。
人们提出模糊控制与传统PID控制相结合,组成复合模糊PID控制器的策略,取长补短,综合其优点。
当误差大于某一阈值时,首先利用模糊控制算法,加快系统的响应速度,提高系统的阻尼特性且减小响应过程的超调量,使误差尽快到达平衡点附近;当误差到达平衡点附近时,经过阈值开关的转化,利用PI控制器中的积分作用消除系统的误差。
本文变桨距控制即采用这种复合控制技术。
1 风电机组变桨距控制工况分析定桨距风电机组相比,变桨距风电机组具有较好功率平滑控制性能及并网更加灵活等优点,被广泛应用于现代风力发电系统中。
直驱式永磁同步风力发电机变速变桨距控制

直驱式永磁同步风力发电机变速变桨距控制变桨距是最常见的控制风力发电机组吸收风能的方法。
变桨距控制会对所有由风轮产生的空气动力载荷产生影响。
直驱式永磁风力发电机组一旦达到额定转矩,载荷转矩就不能继续增加,但风速还在增加,所以转速也开始增加,应用变桨距控制调节转速,使转速不超过上限,并由变流器保证载荷转矩恒定不变。
通常PI或PID调节器调节桨距角就可以满足要求,在有些情况下要用滤波器对转速误差进行处理,以防止过度的桨距动作。
一、变速变桨距控制概述1.基本控制要求在额定风速以下时,风力发电机组应该尽可能捕捉较多风能,所以这时没有必要改变桨距角,此时的空气动力载荷通常比在额定风速以上时的动力载荷小,也没有必要通过变桨距来调节载荷。
在额定风速以上时,变桨距控制可以有效调节风力发电机组的吸收功率及风轮产生的载荷,使其不超出设计的限定值。
而且为了达到良好的调节效果,变桨距应该对变化的情况作出迅速的反应。
这种主动控制器需要仔细设计,因为它会与风力发电机组的动态特性相互影响。
随着叶片攻角的变化,气流对风轮的作用力也会随之发生改变,这就会导致风力发电机组塔架的振动。
随着风速的增加,为了保持功率恒定,转矩桨距角也随着增加,风轮所受到的力将会减小。
这就使塔架的弯曲减小,塔架的顶端就会向前移动引起以风轮为参照物的相对风速的增加。
空气动力产生的转矩进一步增加,引起更大的调桨动作。
显然,如果变桨距控制器的增益太高会导致正反馈不稳定。
2.主动失速变桨距在额定风速以下时,桨距角设定值应该设置在能够吸收最大功率的最优值。
按照这个原则,当风速超过额定风速时,增大或减小桨距角都会减小机组转矩。
减小桨距角,即将叶片前缘转向背风侧,通过增大失速角来调节转矩,使升力减小,阻力增加,称为主动失速变桨距。
尽管顺桨是更常见的控制策略,但是有些风力发电机组采用主动失速变桨距的方法,通常称为主动失速。
向顺桨方向变桨距比主动失速需要更多的动态主动性,一旦大部分叶片失速,就没有足够的变桨距调节来控制转矩。
风力发电机组变桨距控制器的研究
图 2 风能利用系数 Cp曲线
根据图 2及公式计算得当桨距角的值取 0°时,风
74
风力发电机组中的发电机一般采用异步发电机,
通过建立发电机的模型,发电机的反扭矩方程:
Te= (ωG
gm1U12r′2 -ω1)[(r1 -ωCG1r-′2ωω1)2
+(x1
+C1x′2)2]
(6)
式中:g为发电机极对数;m1 为相数;U1 为修正数;ωG
的动态过程,可以简化为一阶数学模型:
dβ=(βr-β dt Tβ 公式(5)进行拉氏变换得:
(7)
β=TβS1+1βr
(8)
式中:Tβ 为变桨 距 执 行 机 构 时 间 常 数,s;βr为 参 考 桨
距角,°;β为输出桨距角,°。
变桨距执行机构模型如图 3所示。
图 3 变桨距执行机构结构
2 模糊自适应 PID控制器的设计
(湖北民族大学信息工程学院,湖北 恩施 445000)
摘要:针对风力发电机组在高风速下运行时输出功率不稳定的问题,提出了模糊自适应 PID变桨距控制器的设计方案。
以机组实际输出功率值与额定功率值的偏差及其偏差的变化率作为控制器的输入变量,确定模糊语言和隶属函数,基于 Matlab/Simulink上对整个系统进行仿真。仿真结果表明模糊自适应 PID控制器具有很好的控制精度和鲁棒性。
1.2 传动系统的建模
通过有关风能利用系数 Cp是叶尖速比 λ和桨距 角 β的函数:
Cp=(0.44-0.0167λ)sin[1π5(-λ0-.33)β]-
0.00184(λ-3)β
(3)
1 λ
=λ+01.08β-0β.30+315
(4)
由近似函数可得图 2所示 Cp的曲线。
直驱风力发电模糊PID变桨距控制
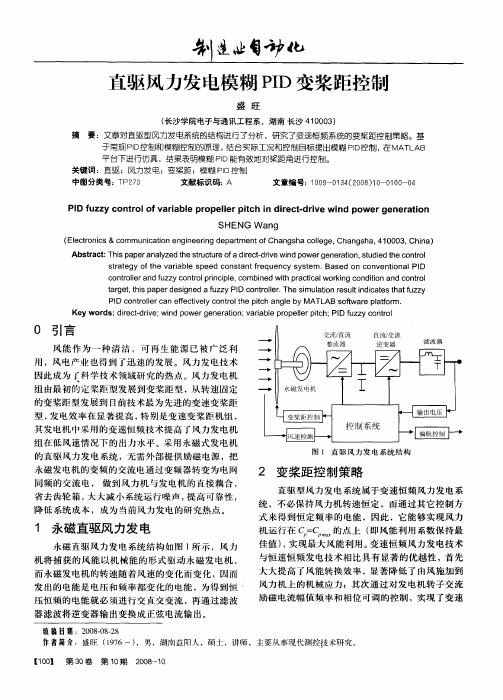
的直 驱风 力发 电 系统 ,无 需外 部提 供励磁 电源 ,把
永磁 发 电机 的变 频 的交流 电通过 变频 器转变 为 电网 同频 的 交流 电 , 做 到 风力机 与 发 电机 的直接 藕合 , 省去 齿轮 箱 , 大减 小 系统 运行 噪声 , 高 可靠性 , 大 提 降低 系统 成本 ,成 为 当前风 力发 电 的研 究 热 点 。
、 I
匐 似
盛 ቤተ መጻሕፍቲ ባይዱ
直 驱 风 力发 电 模 糊 I 变 桨 距控 制 PD
( 长沙学 院电子 与通 讯工 程系 ,湖南 长沙 4 0 0 ) 1 0 3
摘
要 :文章对直驱型风力发电系统的结构进行了分析 ,研究 了变速恒频系统 的变 桨距控制策 略。基 于常规 PD 制和 模糊控制的原 理 , I控 结合实际工况和控制 目标提 出模糊 PI D控制 , MAT AB 在 L 平台下进行仿真 ,结果表明模糊 PD能有效地对 桨距 角进 行控制。 I 关键词 :直驱 ;风力发电 ;变桨距 ;模糊 PD控制 I
风 力机 上 的机 械应 力 ;其 次通 过 对发 电机 转子 交流 励磁 电流 幅值频 率 和相 位可 调 的控制 ,实 现 了变速
机 将 捕 获 的风 能 以机 械能 的 形 式驱 动 永磁 发 电机 ,
( e to is& c Elcr nc ommu ia in e gn e igd ar nc t n ie r ep t o n men fCh n s a c l g , a g h 41 0 3, ia) to a g h ol e Ch n s a, 0 0 Chn e
基于ANFIS的风力发电机组变桨距控制

3 C o l l e g e o fE l e c t r i c a l a n d I n f o r m a t i o n E n g i n e e r i n g , L a n z h o u U n i v e r s i t y fS o c i e n c e &T e c h n o l o g y , L a n z h o u G a n s u 7 3 0 0 5 0 ,C h i n a )
h a s g o o d r o bu s t n e s s a nd d y n ami c p e fo r r ma nc 甘肃 兰州
7 3 0 0 5 0 , 2 .甘肃省兰州供 电公司 , 甘肃 兰州
7 3 0 0 5 0 )
7 3 0 0 5 0,
3兰 州 理 工 大 学 电气 工 程 与信 息 工 程 学 院 , 甘 肃 兰州
摘
要 :风速的随机变化对风力发电机组变桨距控制提出了更高 的要求 , 提 出基于 自适 应神经模糊推理系统 ( A d a p t i v e N e u r a l F u z z y I n — f e r e n c e S y s t e m, A N F I S ) 的风力发电机组变桨距控制策 略, 构造 了风力发 电机的数学模型 , 将实测的发电机转速 和实际的发 电机 转速的误差作 为控制器的输入 , 在随机风速下对 自适应神经模糊推理系统控 制器进行 实验 仿真分析 。实验结 果表明 , 采用 自
适 应 神 经 模 糊推 理 系统 控 制 的 风 力发 电机 组 变 桨 距 控制 具 有 良好 的鲁 棒性 和动 态 性 能 。
风力发电机组变桨距控制策略

2023-11-10CATALOGUE 目录•风力发电机组简介•变桨距控制策略的基本理论•变桨距控制策略的实现方法•变桨距控制策略的优化方法•变桨距控制策略在实际中的应用及案例分析01风力发电机组简介风力发电机组的基本构造风力发电机组的核心部件,由叶片和轮毂组成,用于捕捉风能并将其转化为机械能。
风轮齿轮箱发电机塔筒连接风轮和发电机的重要部件,将风轮的转速提升到发电机所需的速度。
将机械能转化为电能的重要部件,由定子和转子组成。
支撑风轮和发电机的高耸结构,通常由钢铁或混凝土制成。
风力发电机组通过旋转的风轮捕捉风的动能,并将其转化为机械能。
风的捕捉机械能的转化电能的产生机械能通过齿轮箱的传递,将转速提升到发电机所需的速度。
发电机将机械能转化为电能,通过电缆输送到电网。
03风力发电机组的运行原理0201按风向分类水平轴风力发电机组和垂直轴风力发电机组。
水平轴风力发电机组的风轮轴与地面平行,而垂直轴风力发电机组的风轮轴与地面垂直。
风力发电机组的分类按容量分类小型、中型和大型风力发电机组。
小型风力发电机组的功率通常在几百瓦到几千瓦之间,中型风力发电机组的功率在几兆瓦到几十兆瓦之间,而大型风力发电机组的功率通常在几百兆瓦到几兆瓦之间。
按运行原理分类恒速风力发电机组和变速风力发电机组。
恒速风力发电机组的风轮转速保持不变,而变速风力发电机组的风轮转速可以根据风速进行调整。
02变桨距控制策略的基本理论变桨距控制是一种用于调节风力发电机组功率输出的技术,通过改变桨叶的桨距角实现对风能捕获的优化控制。
在风速较高时,通过减小桨距角增加风能捕获,以提升发电机组的功率输出;在风速较低时,通过增大桨距角减小风能捕获,以避免过度捕获风能导致发电机组振动和疲劳损坏。
变桨距控制的概念和意义变桨距控制系统的基本结构变桨距控制系统主要由传感器、控制器和执行器组成。
传感器负责监测风速、风向和发电机组运行状态;控制器根据传感器信号和预设的控制逻辑对执行器进行指令输出;执行器根据指令调整桨叶的桨距角。
基于BP神经网络的风力发电机组变桨距控制仿真研究

o2 .
篓o . 1
0
如何最大程度 的利用风能,一直是各 国科研人员 的研究重 点。 尤其是在风速高于额定风速时 , 风能得到了很大的浪费。 从高 风速时依靠 B P神经 网络控制技术来改变桨距角 , 使高风速 时风 能能够得到最大程度的利用。 智能控制领域 中的神经网络是一个
0 1、 h t 、 dP ■1 n ■ 1h 1 h . 覃 , ,i ,} t P 1 J 荨 j ,、■, . 0 - -, i、h j i 1 ■ , 0 售 — , 、- i i 0 P 1 ■■ 1n ■● 1 ■● , 覃、h j l 、■
杨晓红 葛海涛
( 华北电力大学 机械 工程系 , 保定 0 10 ) 7 0 3
Si lt n r s a c n v r be p th c n r I f n o r e e a in b s d o mua i e e r h o a i l— i o t d p we n r t a e n o a c o o wi g o
e sr tegn r o i a l r e o e. ial, ev r c i ae ntes uai d 1 nue h ee a r t as e a dp w r Fnl t ei a o i t no h i l o m e . t w h t t b yh i ft ns k m t no
机 械 设 计与 制 造
l4 8
文章 编 号 :0 1 39 (0 0 0 — 14 0 10 — 9 7 2 1 )7 0 8— 3
第 7期
21 0 0年 7月
Ma h n r De i n c iey sg
&
Ma u a t r n fcue
变桨距风力发电机组控制方法研究和仿真

图 1所示。
º对于任意的叶尖速比 K, 桨叶节距角 B= 0b时的风 能利用系数 Cp 相对最大。桨叶节距角 B增大, 风能 利用系数 Cp 明显减小。以上两点为变速恒频变桨 距控制提供了理论基础: 在风速低于额定风速时, 桨 叶节距角 B= 0b, 通过变速恒频装置, 随风速变化改 变发电机转子转速使风能利用系数恒定在 Cpm ax, 捕 获最大风能, 并输出电能频率不变; 在风速高于额定 风速时, 调节桨叶节距角从而改变发电机输出功率, 使输出功率稳定在额定功率附近。
参考文献:
[ J]. 3 d ASME / JSME Joint F lu ids Engineer ing Confe r2 ence . 1999, 7: 18O23.
(上接第 70页 )
[ 10] 钱正安, 贺慧霞、瞿张, 等. 我国西 北地区 沙尘暴 的分 级标准个例谱 及其 统 计特 征 [ A ]. 中 国沙 尘 暴研 究 [ C ]. 编著钱正 安. 北京: 气象出版社. 1996.
[ 11] 张宁, 黄维, 陆荫, 等. 沙尘 暴降尘 在甘肃 的沉降 状况 研究 [ J]. 中国沙漠 , 1998, 18( 1) : 32O37.
[ 12] 张宁, 牛耘, 李春生, 等 . 兰 州市大 气降尘 沉积物 的粒 度分布特征研究 [ J]. 干旱环境监测, 1998, 12( 1): 15O 1 9.
[ 17] 张宁, 吴仁铭. 兰州市 大气颗 粒物中水 溶性离 子研究 [ J]. 环境化学, 1994, 13( 5): 453O45.
[ 20] 黄雪莲, 金 煜. 沙 尘暴 PM2. 5 PM10对大 鼠肺 泡巨 细胞 炎性因 子分泌的影 响 [ J] . 环 境与健康杂 志, 2004, 21 ( 1): 38O40.