噪声模型
斑点噪声的形成原理与斑点噪声模型
第二章相干斑点噪声的形成原理与斑点噪声模型相干斑点噪声是SAR影像的重要特征之一。
要进行新滤波器的设计和开发,有必要了解斑点噪声的形成原理和斑点噪声模型以及其他相关知识,因此本章就斑点噪声的形成原理,概率分布函数、自相关函数、功率谱以及人们比较公认的斑点噪声模型做一个简要的介绍。
2.1 斑点噪声的形成原理SAR影像上的斑点噪声是这样形成的[31],即当雷达波照射一个雷达波长尺度的粗糙表面时,返回的信号包含了一个分辨单元内部许多基本散射体的回波,由于表面粗糙的原因,各基本散射体与传感器之间的距离是不一样的,因此,尽管接收到的回波在频率上是相干的,回波在相位上已不再是相干的;如果回波相位一致,那么接收到的是强信号,如果回波相位不一致,则接收到的是弱信号。
一幅SAR影像是通过对来自连续雷达脉冲的回波进行相干处理而形成的。
其结果是导致回波强度发生逐像素的变化,这种变化在模式上表现为颗粒状,称为斑点噪声(Speckle)。
SAR影像上斑点噪声的存在产生了许多后果,最明显的后果就是用单个像素的强度值来度量分布式目标的反射率会发生错误。
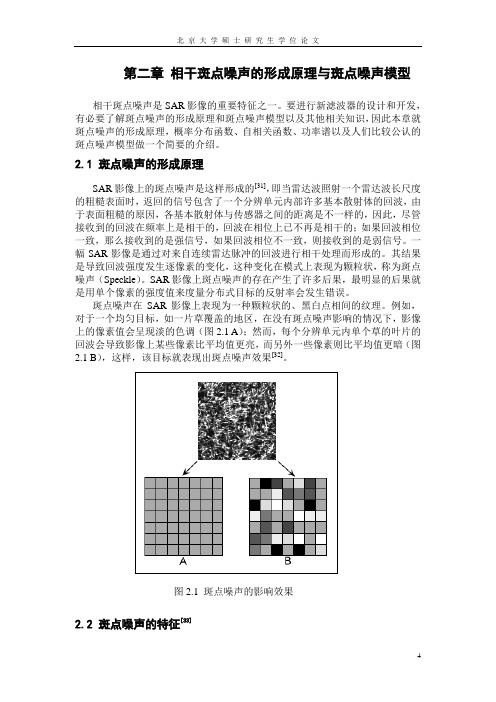
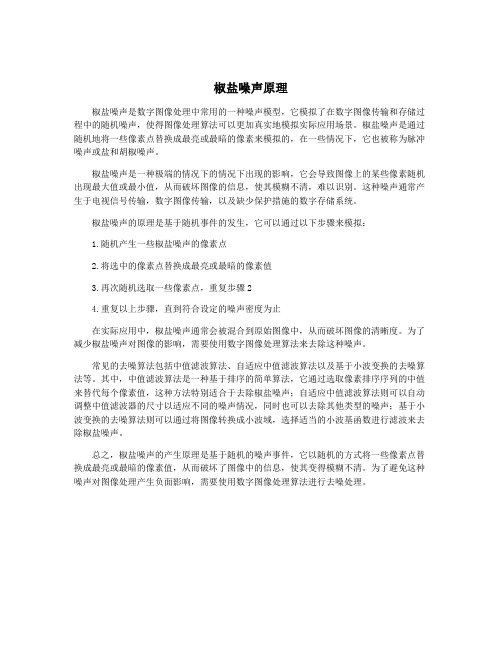
斑点噪声在SAR影像上表现为一种颗粒状的、黑白点相间的纹理。
例如,对于一个均匀目标,如一片草覆盖的地区,在没有斑点噪声影响的情况下,影像上的像素值会呈现淡的色调(图2.1 A);然而,每个分辨单元内单个草的叶片的回波会导致影像上某些像素比平均值更亮,而另外一些像素则比平均值更暗(图2.1 B),这样,该目标就表现出斑点噪声效果[32]。
图2.1 斑点噪声的影响效果2.2 斑点噪声的特征[33]2.2.1 斑点噪声的概率分布函数2.2.1.1单视SAR 图像前人在光学和SAR 影像斑点噪声的理论分析上已经做了大量工作[31]、[34] 。
单视图像的斑点噪声服从负指数分布,对均匀的目标场景,图像的像素强度的概率分布为: I I I I p )/exp()(-= (2.1)若以振幅A 或分贝值D 来表示,它们与强度I 的关系为I=A 2 (2.2)I I D ln 10ln 10log 1010== (2.3) 所以强度概率分布可以直接转化为下式:)/e x p (2)(2I A IA A p -= (2.4) I K IK D K D D p ))/e x p (e x p ()(-= (2.5)其中k=10/ln10。
深度学习中的模型解决噪声数据问题的方法

深度学习中的模型解决噪声数据问题的方法深度学习在各个领域都取得了重要的突破和应用,但噪声数据是深度学习中一个常见的挑战。
噪声数据指的是在训练数据中存在的不准确、不完整或有其他干扰因素的数据。
处理噪声数据是深度学习中非常重要的一环,本文将介绍几种常用的方法来解决这个问题。
一、数据清洗数据清洗是指对噪声数据进行处理,使其更加准确和有用。
数据清洗可以包括以下几个步骤:1. 噪声检测:通过统计分析和可视化等方法,确定数据中存在的噪声类型和分布。
常见的噪声类型有异常值、缺失值和重复值等。
2. 异常值处理:异常值是指与其他观测值相比明显偏离的数据点。
可以通过删除或替换异常值来减少噪声对模型的干扰。
3. 缺失值处理:缺失值是指数据中某些观测值缺失的情况。
可以通过删除包含缺失值的样本、使用插补方法填补缺失值或利用模型预测缺失值等方式进行处理。
4. 重复值处理:重复值是指数据中存在的重复观测值。
可以通过删除重复观测值来减少噪声对模型的影响。
二、增强学习增强学习是一种通过与环境交互获得反馈信息来改善模型性能的方法。
在深度学习中,增强学习可以用于减少噪声数据的影响。
1. 强化学习算法:强化学习是通过模拟智能体与环境的交互,找到最优的决策策略。
可以通过引入强化学习算法来对噪声数据进行建模和处理,使模型更加鲁棒。
2. 基于奖励的学习:通过设置合适的奖励机制,可以引导模型在噪声数据存在的情况下,选择更准确的预测结果。
例如,在自然语言处理中,可以通过设置更高的奖励值来强调正确理解重要信息的重要性。
三、数据增强数据增强是一种通过对原始数据进行变换和扩充来增加训练数据量和多样性的方法。
1. 旋转和平移:对图像数据进行随机旋转和平移操作,可以增加数据的多样性和鲁棒性,减少噪声数据的影响。
2. 噪声添加:在噪声数据存在的情况下,可以通过为训练数据添加噪声来增加模型的鲁棒性。
例如,在语音识别中,可以为训练数据添加不同程度的噪声来模拟真实场景下的环境噪声。
第二章 相干斑点噪声的形成原理与斑点噪声模型

第二章相干斑点噪声的形成原理与斑点噪声模型相干斑点噪声是SAR影像的重要特征之一。
要进行新滤波器的设计和开发,有必要了解斑点噪声的形成原理和斑点噪声模型以及其他相关知识,因此本章就斑点噪声的形成原理,概率分布函数、自相关函数、功率谱以及人们比较公认的斑点噪声模型做一个简要的介绍。
2.1 斑点噪声的形成原理SAR影像上的斑点噪声是这样形成的[31],即当雷达波照射一个雷达波长尺度的粗糙表面时,返回的信号包含了一个分辨单元内部许多基本散射体的回波,由于表面粗糙的原因,各基本散射体与传感器之间的距离是不一样的,因此,尽管接收到的回波在频率上是相干的,回波在相位上已不再是相干的;如果回波相位一致,那么接收到的是强信号,如果回波相位不一致,则接收到的是弱信号。
一幅SAR影像是通过对来自连续雷达脉冲的回波进行相干处理而形成的。
其结果是导致回波强度发生逐像素的变化,这种变化在模式上表现为颗粒状,称为斑点噪声(Speckle)。
SAR影像上斑点噪声的存在产生了许多后果,最明显的后果就是用单个像素的强度值来度量分布式目标的反射率会发生错误。
斑点噪声在SAR影像上表现为一种颗粒状的、黑白点相间的纹理。
例如,对于一个均匀目标,如一片草覆盖的地区,在没有斑点噪声影响的情况下,影像上的像素值会呈现淡的色调(图2.1 A);然而,每个分辨单元内单个草的叶片的回波会导致影像上某些像素比平均值更亮,而另外一些像素则比平均值更暗(图2.1 B),这样,该目标就表现出斑点噪声效果[32]。
图2.1 斑点噪声的影响效果2.2 斑点噪声的特征[33]2.2.1 斑点噪声的概率分布函数2.2.1.1单视SAR 图像前人在光学和SAR 影像斑点噪声的理论分析上已经做了大量工作[31]、[34] 。
单视图像的斑点噪声服从负指数分布,对均匀的目标场景,图像的像素强度的概率分布为: I I I I p )/exp()(-= (2.1)若以振幅A 或分贝值D 来表示,它们与强度I 的关系为I=A 2 (2.2)I I D ln 10ln 10log 1010== (2.3) 所以强度概率分布可以直接转化为下式:)/ex p(2)(2I A IA A p -= (2.4) I K IK D K D D p ))/exp(exp()(-= (2.5)其中k=10/ln10。
椒盐噪声原理
椒盐噪声原理椒盐噪声是数字图像处理中常用的一种噪声模型,它模拟了在数字图像传输和存储过程中的随机噪声,使得图像处理算法可以更加真实地模拟实际应用场景。
椒盐噪声是通过随机地将一些像素点替换成最亮或最暗的像素来模拟的,在一些情况下,它也被称为脉冲噪声或盐和胡椒噪声。
椒盐噪声是一种极端的情况下的情况下出现的影响,它会导致图像上的某些像素随机出现最大值或最小值,从而破坏图像的信息,使其模糊不清,难以识别。
这种噪声通常产生于电视信号传输,数字图像传输,以及缺少保护措施的数字存储系统。
椒盐噪声的原理是基于随机事件的发生,它可以通过以下步骤来模拟:1.随机产生一些椒盐噪声的像素点2.将选中的像素点替换成最亮或最暗的像素值3.再次随机选取一些像素点,重复步骤24.重复以上步骤,直到符合设定的噪声密度为止在实际应用中,椒盐噪声通常会被混合到原始图像中,从而破坏图像的清晰度。
为了减少椒盐噪声对图像的影响,需要使用数字图像处理算法来去除这种噪声。
常见的去噪算法包括中值滤波算法、自适应中值滤波算法以及基于小波变换的去噪算法等。
其中,中值滤波算法是一种基于排序的简单算法,它通过选取像素排序序列的中值来替代每个像素值,这种方法特别适合于去除椒盐噪声;自适应中值滤波算法则可以自动调整中值滤波器的尺寸以适应不同的噪声情况,同时也可以去除其他类型的噪声;基于小波变换的去噪算法则可以通过将图像转换成小波域,选择适当的小波基函数进行滤波来去除椒盐噪声。
总之,椒盐噪声的产生原理是基于随机的噪声事件,它以随机的方式将一些像素点替换成最亮或最暗的像素值,从而破坏了图像中的信息,使其变得模糊不清。
为了避免这种噪声对图像处理产生负面影响,需要使用数字图像处理算法进行去噪处理。
城市轨道交通列车噪声预测模型研究1000字

城市轨道交通列车噪声预测模型研究随着城市轨道交通的快速发展,沿线居民对列车噪声的影响越来越关注。
因此,建立一种有效的列车噪声预测模型是非常必要的。
本文将从预测模型的构建、数据的获取和处理以及模型评估等方面进行研究和探讨。
一、预测模型的构建(1) 数据采集首先,需要采集关于列车噪声的数据,包括噪声源、位置、频率等信息。
而要采集到真实可靠的数据,需要选择合适的数据采集仪器,如声级计、振动传感器等,同时需考虑采集时间的合理安排,以保证数据的完整性和准确性。
(2) 数据处理采集到的数据需要进行预处理,包括数据清洗、归一化、分析、筛选等。
例如,可以使用MATLAB或Python等工具对数据进行清洗和分析,并将数据进行归一化处理,以便于后续的模型训练和预测。
(3) 建立预测模型由于列车噪声具有决策性、随机性及周期性的特点,因此可以采用基于模型的预测方法和基于数据的预测方法相结合的方式来建立噪声预测模型。
例如,可以基于多元线性回归、支持向量机、神经网络等方法进行模型的构建,以提高模型的准确性和可靠性。
(4) 模型预测最后,利用所建立的噪声预测模型进行预测,得到预测值。
可以将预测值与实测值进行比对,以评估模型的准确性和可靠性,同时可以针对预测结果进行进一步的分析和处理。
二、数据获取和处理(1) 数据采集采集数据时需要选择合适的位置和时间,应尽量避免噪声干扰,例如可选取呈现不同噪声源分布的地铁站、地铁车辆以及隧道内空间等场景进行采集。
另外,为保证数据的准确性和可靠性,应选取可靠的仪器进行数据采集,并保持相应的仪器校准。
(2) 数据处理采集到的数据需要进行预处理,包括数据清洗、去重、筛选等。
例如,可将数据进行归一化、平滑化或滤波处理,以提高数据的可靠性和准确性。
此外,还需基于实际问题进行数据筛选和分类,以便于后续的模型构建。
三、模型评估模型评估是衡量模型性能和结果的重要手段,具有广泛的应用。
在列车噪声预测模型的评估中,主要需要从模型准确率、全面性、鲁棒性、可靠性等方面进行评估,并应综合考虑多个指标,以获得全面准确的评估结果。
matlab 高斯噪声代码

matlab 高斯噪声代码高斯噪声是一种常见的噪声模型,经常用于模拟真实世界中的随机噪声。
在信号处理和通信系统中,我们经常需要对信号进行处理和分析,而噪声是这些系统中不可避免的因素之一。
通过模拟高斯噪声,我们可以更好地理解和研究信号处理和通信系统的性能。
为了实现高斯噪声的模拟,我们可以使用MATLAB编程语言来实现。
MATLAB提供了一些内置函数和工具箱,可以方便地生成高斯分布的随机数。
下面我们将介绍如何使用MATLAB生成高斯噪声。
我们需要了解高斯分布的数学定义。
高斯分布又称为正态分布,是一种连续概率分布。
它的概率密度函数可以表示为:P(x) = 1 / (σ * sqrt(2π)) * exp(-(x - μ)^2 / (2σ^2))其中,μ是均值,σ是标准差。
高斯分布的特点是以均值为中心,标准差决定了分布的宽窄程度。
在MATLAB中,我们可以使用randn函数来生成服从标准正态分布的随机数。
标准正态分布是均值为0,标准差为1的高斯分布。
```matlabn = 1000; % 生成1000个高斯噪声样本mu = 0; % 均值为0sigma = 1; % 标准差为1noise = mu + sigma * randn(n, 1);```以上代码将生成一个包含1000个服从标准正态分布的随机数的向量。
我们可以通过改变均值和标准差的值来生成不同均值和方差的高斯噪声。
除了生成标准正态分布的高斯噪声外,我们还可以通过线性变换来生成具有不同均值和方差的高斯噪声。
假设我们想要生成均值为mu,标准差为sigma的高斯噪声,我们可以使用以下代码:```matlabnoise = mu + sigma * randn(n, 1);```通过以上代码,我们可以很容易地生成高斯噪声。
生成的噪声向量可以用于模拟各种系统中的随机噪声,如通信系统中的信道噪声、图像处理中的噪声去除等。
除了生成高斯噪声外,MATLAB还提供了一些内置函数和工具箱,可以对信号进行滤波和降噪。
浅海风成海洋环境噪声模型

浅海风成海洋环境噪声模型摘要:本文推导了浅海风成噪声的互谱密度,给出了互谱密度的简正波表达式,然后给出了谱级随频率的数值计算结果并对南海实验所测得的环境噪声数据进行分析,最后给出结论。
关键词:风成噪声互谱密度简正波1、引言风噪声是海洋环境噪声中比较重要的组成部分,它存在于噪声谱中相当宽的范围内[1],快速并准确的预报模型是近年来的重要课题。
2、风成噪声场模型设噪声源位于深度为z′无穷大平面内,如图1所示。
源平面中某一点的声源强度以单极子声源表示,令其强度为s(r′,t)。
tp(5)以下使R=r1-r2,ρ=r’-r’’,假设噪声源空间相关是均匀的,在空间上它只与生源间隔p=r’-r’’有关,即:=q2N(p)这里q是噪声源强度。
则公式(5)可转化为:(6)式(6)经积分可转化为:(7)由于假设噪声源为无指向性的,则其相关函数N(ρ)是空间各向同性的。
另外,由于假定这些噪声源分布在图1的源平面上,在存在压力释放表面的情况下,这些噪声源是作为高阶极子辐射器与海水耦合的。
如果噪声源是不相关的,它们的相关函数就有δ函数的形式。
对不相关噪声源,相关函数可表示为[1]:(8)利用式(8)则式(7)可以写为:(9)当R=0和z1=z2=z时则公式(7)退化为:(10)3、噪声场的简正波表示这部分用第二部分的结果应用于分层介质,在分层介质中声速和密度只是深度的函数,格林函数可以表示成相对简单的形式,用简正波求解一般传播问题时,若接收器离声源足够远,则简正波连续谱对声场贡献很小,只需计算简正波的离散谱。
而噪声源为海面下一层均匀分布的单极子,由于有近距离声源存在,简正波连续谱部分不能忽略,即必须考虑分支线积分。
以下用特征函数展开式,即简正波模式展开式来表示与深度有关的格林函数:(11)最后,经过一系列简化,当海面声源不相关时,互谱密度可以写为:(12)从(12)式可以看到衰减系数对海面噪声场结构影响很大,在浅海中,海底沉积物的声学相互作用对衰减系数的影响很大。
awgn python计算公式

AWGN(Additive White Gaussian Noise)是一种在通信系统和数字信号处理中常见的噪声模型。
在Python中,我们可以使用一些简单的计算公式来模拟AWGN,以便对通信系统或者信号处理算法进行仿真和测试。
下面将介绍如何在Python中使用计算公式来生成AWGN噪声。
1. AWGN的数学模型AWGN噪声的数学模型是一个零均值、方差为 $\sigma^2$ 的高斯分布随机变量。
其概率密度函数(PDF)可以表示为:$$f(x) = \frac{1}{\sqrt{2\pi}\sigma} e^{-\frac{x^2}{2\sigma^2}} $$其中,$x$ 表示随机变量的取值,$\sigma^2$ 表示噪声的方差。
2. 在Python中生成AWGN噪声在Python中,我们可以使用 `numpy` 库来生成AWGN噪声。
以下是一个简单的代码示例:```pythonimport numpy as npdef awgn(mu, sigma, size):noise = np.random.normal(mu, sigma, size)return noise```在这个示例中,我们定义了一个函数 `awgn`,该函数接受三个参数:`mu` 表示噪声的均值(通常为0),`sigma` 表示噪声的标准差,`size` 表示生成噪声的长度。
3. 示例下面我们来演示如何使用上述代码生成AWGN噪声:```pythonmu = 0sigma = 1size = 1000noise = awgn(mu, sigma, size)```在这个示例中,我们生成了一个均值为0,标准差为1,长度为1000的AWGN噪声。
4. 结论通过上述代码示例,我们可以很容易地在Python中生成AWGN噪声,并将其应用于通信系统或者信号处理算法的仿真和测试中。
这种简单的计算公式不仅方便实用,而且可以帮助我们更好地理解AWGN噪声的特性和对系统性能的影响。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
流体噪声源预测模型
Linearized Euler Equation (LEE) noise source model
该模型考虑了剪切流中的折射和对流效应,相对于Lilley模型有更广的适用 范围. 源项与流场的脉动速度成非线性关系 适用于剪切流中的四级子声源. 该模型只适用于定常解析. 模型的详细介绍可参考以下内容.
1
3
网格导入
网格导入
本例中使用已生成的体网格m
1
3 选择m
2
4
网格导入
网格导入
为了在导入网格后自动显示几何模型,选择导入后打开集合 视图(Open geometry scene after import)选项
1
2
网格导入
网格显示
1 2
网格导入
确认网格数
每个Region的网格数都可确认
参考文献
Bechara, W., Bailly, C., Lafon, P., and Candel, S. 1994. "Stochastic approach to Noise Modeling for Free Turbulent Flows", AIAA Journal, 32:3, pp. 455-463.
固体绕流 剪切流
该模型只适用于定常解析 模型的详细介绍可参考以下内容.
参考文献
Lilley, G.M. 1993. "The radiated noise from isotropic turbulence revisited", NASA Contract Report No. 93-75, NASA Langley Research Center.
2
4
后处理设定
生成截面显示结果
生成截面.
1 右键单击
3 2
45
后处理设定
制作矢量图
速度矢量.
1 6
2
3
7
右键单击
4 5Leabharlann 后处理设定制作标量图
表示噪音源的分布
1
2
6
3
7
单击右键
4 5
制作标量图
表示噪音源分布
后处理设定
1 2
视图调整
残差图.
双击
1
解析
解析
视图调整
对残差标签进行拖动调整位置,在红框位置松开鼠标左键
解析概要
概要
反光镜周围流场
网格
网格类型 四面体 体网格数 约 100,000
物性
空气
解析
分离解法
入口 (速度:100km/h)
湍流: k-ωSST 两层模型
定常解析
理想气体
侧壁及顶面:slip
出口 (自由流出)
反光镜,地面:no-slip
网格导入
STAR-CCM+启动
2
此次计算采用单CPU,选择串 行
拖放
解析
视图调整
对残差标签进行拖动调整位置,在红框位置松开鼠标左键
拖放
视图调整
视图最终位置.
速度矢量
解析
噪音源分布
残差
解析
最大迭代步数设定
最大迭代步数设为500.
1
2
解析
结果
迭代500步计算自动停止
解析
更换噪音源模型(Proudman)
Proudman模型
1
2
解析
更换噪音源模型(Proudman)
STAR-CCM+ V4.06 设定手册
流体噪声源
目录
流体噪声源解析
流体噪声源预测模型・・・・・・・・・・・・・・・・・・・・・・・・・・・・
3
解析概要
・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 9
网格导入
・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 10
解析设定
・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 15
流体噪声源预测模型
Lilley noise source model
该模型通过压缩性流体质量守恒和动量守恒的方程得到的三阶精度波动方 程求得. 该模型计算三项:Lilley自噪声源,Lilley 剪切噪声源和Lilley总噪声源 解析対象为紊流流场中四极子噪声源. 湍流模型:Reynolds-Averaged Navier-Stokes (RANS) 应用:
改变表示噪音源分布的部件
1
4
单击右键
2 3 5
解析
更换噪音源模型(Proudman)
改变标量函数.
1 2
解析
更换噪音源模型(LEE)
LEE模型.
1
2
解析
更换噪音源模型(LEE)
LEE模型Sovlers设定
单击右键
1 2
注意!! 不执行LEE模型解算,无法表示噪音源
解析
更换噪音源模型(LEE)
物理模型设定 (9/10)
Curl
1
解析设定
物理模型设定 (10/10)
全部模型设定为下图
1
初始条件设定
初始条件设定
初始速度(x方向)为100km/h
1 2
边界条件设定
入口边界条件设定
入口速度(x方向)为100km/h
1 2
边界条件设定
滑移壁面边界条件设定
顶面和侧面设定为滑移壁面边界条件
1
3
更换噪音源模型(Lilley)
改变标量函数.
1 2
流体噪声源预测模型
Curle noise source model
该模型用于预测流场中存在障碍物的壁面(固体边界)产生的偶极子源 (低马赫数,湍流边界层) 可以用来预测:
air handling subsystem (AHS) applications(including rotating parts (such as blowers), heat exchangers, mufflers, distribution ducts and wall-enclosed spaces )
参考文献
Goldstein, M.E. and Rosenbaum, B. 1973. "Effect of Anisotropic Turbulence on Aerodynamic Noise", J. Acoustical Society of America, 54, pp. 630-645. Ribner, H.S. 1964. "The Generation of Sound by Turbulent Jets", in Advances in Applied Mathematics, Academic Press, New York.
模型的详细介绍可参考以下内容.
Online Help
Modeling > Modeling Turblence and Transition > Using Broadband Noise Source Models>
参考文献
Proudman, I. 1952. "The Generation of Noise by Isotropic Turbulence", Proc. R. Soc. Lond. 214, pp. 119-132.
改变标量函数.
1 2
解析
更换噪音源模型(Lilley)
Lilley模型.
1
2
解析
更换噪音源模型(Lilley)
Lilley模型Sovlers设定
单击右键
1 2
注意!! 不执行Lilley模型解算,无法表示噪音源
解析
更换噪音源模型(Lilley)
改变表示噪音源分布的部件.
1
单击右键
2 3
4 5
解析
该模型可用于定常和非定常解析 湍流模型建议:Reynolds-Averaged Navier-Stokes (RANS) 模型的详细介绍可参考以下内容.
参考文献
Curle, N. 1955. "The Influence of Solid Boundaries upon Aerodynamic Sound", Proceedings of the Royal Society of London, series A, Mathematical and Physical Sciences, 231, pp. 505-514.
在STAR-CCM+ V4.06中使用K-E和K-Omega等雷诺平均模 型(RANS模型)进行定常计算,用定常计算结果对噪声源进行 预测. STAR-CCM+ V4.06中采用以下5个流体噪声源模型
Curle noise source model Goldstein noise source model(该模型只适用于二维计算) LEE noise source model Lilley noise source model Proudman noise source model
分离求解
1
解析设定
物理模型设定 (4/10)
理想气体
1
解析设定
物理模型设定 (5/10)
湍流
1
解析设定
物理模型设定 (6/10)
k-ω湍流
1
解析设定
物理模型设定 (7/10)
k-ω湍流(自动选择了All y+ Wall Treatment)
解析设定
物理模型设定 (8/10)
宽带噪声源
1
解析设定
流体噪声源预测模型
Proudman noise source model
该模型为预测流体空间的四极子噪声源模型(体噪声源). 考虑湍流的各向异性 该模型可用于定常和非定常解析 用于: