单片机STM32外文文献翻译、中英文翻译
STM32F103VE-中文
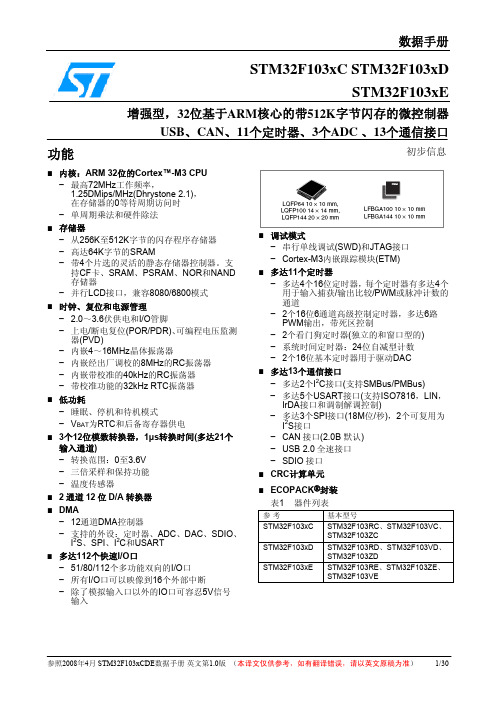
− 2个16位6通道高级控制定时器,多达6路 PWM输出,带死区控制
− 2个看门狗定时器(独立的和窗口型的) − 系统时间定时器:24位自减型计数 − 2个16位基本定时器用于驱动DAC
■ 多达13个通信接口 − 多达2个I2C接口(支持SMBus/PMBus) − 多达5个USART接口(支持ISO7816,LIN, IrDA接口和调制解调控制)
■ 低功耗 − 睡眠、停机和待机模式 − VBAT为RTC和后备寄存器供电
■ 3个12位模数转换器,1μs转换时间(多达21个 输入通道) − 转换范围:0至3.6V − 三倍采样和保持功能 − 温度传感器
■ 2 通道 12 位 D/A 转换器
■ DMA − 12通道DMA控制器 − 支持的外设:定时器、ADC、DAC、SDIO、 I2S、SPI、I2C和USART
■ 多达112个快速I/O口 − 51/80/112个多功能双向的I/O口 − 所有I/O口可以映像到16个外部中断 − 除了模拟输入口以外的IO口可容忍5V信号 输入
■ 调试模式 − 串行单线调试(SWD)和JTAG接口 − Cortex-M3内嵌跟踪模块(ETM)
■ 多达11个定时器
− 多达4个16位定时器,每个定时器有多达4个 用于输入捕获/输出比较/PWM或脉冲计数的 通道
STM32F103xC、STM32F103xD和STM32F103xE增强型系列拥有内置的ARM核心,因此它与
所有的ARM工具和软件兼容。
图一是该系列产品的功能框图。
内置闪存存储器
高达512K字节的内置闪存存储器,用于存放程序和数据。
CRC(循环冗余校验)计算单元
CRC(循环冗余校验)计算单元使用一个固定的多项式发生器,从一个32位的数据字产生一个CRC码。 在众多的应用中,基于CRC的技术被用于验证数据传输或存储的一致性。在EN/IEC 60335-1标准的范 围内,它提供了一种检测闪存存储器错误的手段,CRC计算单元可以用于实时地计算软件的签名, 并与在链接和生成该软件时产生的签名对比。
单片机信号发生器论文中英文资料外文翻译文献
中英文资料外文翻译文献Design of Digital Controlled Signal Generator Based on DDS and MCU Keywords: DDS; MCU; Signal generator; Phase Accumulator; DACAbstract. Its advantage to use DDS chip is output signal frequency bigger, and precision higher, Butusers can't change the output signal waveforms. The MCU can produce the required arbitrary waveforms, but its program execution of the order limit the speed.So we use their Synergy to designthe digital controlled signal generator. The System has the advantage of output good qualitywaveform, frequency of precision and stability ,and high frequency, empty, amplitude and phase is tostep into the need.IntroductionThe digitally synthesized sine waveform (Direct Digital Synthesis, DDS) is a well-known method andhas been applied to many embedded applications [1]. This technique can be used to create a positivedigital sine waveform. Compared to other frequency composing method, Direct Digital FrequencySynthesis(DDS) has been the most popular trend in modern frequency synthetic technique for itsexcellent characteristics. The signal source that the DDS technology realizes can carry out accuratecontrolling on DDS frequency , extent , phase exporting wave form's etc. by numerical control circuit,the system making use of this method has many merits such as stability, reliably and accuracy.The commercial DDS chip can only export a sine wave for the data in the ROM form already hasbeen solidified. If needing to come into being any wave form, it may come true by the way that FPGAadopts DDS IP core or hardware describe language etc, however,the cost of This way cost is high; onthe other hand, any wave form can be achieved by making use of micro controller unit (MCU) to carryout figure frequency combining and DA converting. The experiment and applying testing have shownthat the numerical control signal source composed of STM32 micro controller and DDS chip canwork well.DDS and wave form programming patternThe core of DDS system is phase accumulator carriage, and it is composed of a ADR and one unitphase register. When any clock comes, the phase register increases by with the step length, phaseregister output and phase control word add together, and then the output is imported to sine inquiryform address.The sine inquiring form includes the numeral extent information of one-period sine wave, each address corresponds to the phase dot of 0~360 degrees of the sine wave. The mapping digital signaldrives DAC and outputs analog value. The output sine circle and frequency areThe phase register will return to the original state when the 2N/M fc clock is finished. Accordingly,the DDS system output a sine wave when the sine inquiring form finish a circle. The output sine circleand frequency is TO --output sine wave circle, unit: s; TC --external referenced clock circle, unit: s;M --accumulated step length of phase register, constant; f out --output sine wave frequency, unit: Hz; f c --external referenced clock frequency, unit: Hz; N --phase accumulator digit, constant.The relationship among the frequency control word, and the output signal frequency and the referenced clock frequency are:Frequency control word is directly proportional to the output signal frequency. In order to describeclearly, the sine wave form is as one vector turns around phase circle, the phase circle matches alongwith a cycle sine wave. Every sampling pots in wave form corresponds to a phase dot of the phasecircle.To synthesis the required frequency signal, it needs to accomplish the following steps1. Controlling every sampling increment of phase and accumulating them (frequency control word K),output 2 pi cumulated phase (using phase accumulator).2. Converting 2 pi accumulating phase into the corresponding sine amplitude, use ROM to store thecorresponding phase-extent form of sine function in general.3. Use DAC to change extent code into the signal simulating voltage.4. The voltage signal that DAC exports is ladder wave form , the required simulation voltage outisachieved after LPF smoothing.Numerical control DDS signal source system designs analysisSystem uses the STM32 as control core and the AD9850 as generator. STM32 is 32-bit ARM-basedmicro controller with 128 K byte flash memory.The two signal output of STM32 can be achieved by controlling AD9850 and DAC0832 outputsimultaneously. The system designs block diagram is shown in Fig. 1. One signal output can generate30 MHz sine wave and rectangular wave by controlling AD9850, the other output generate any waveform with its frequency less than 10 KHz by numerical frequency mixture of DAC0832.Fig. 1 System designs block diagramHardware designAD9850 moduleAD9850 contains the DDS system and high-speed comparator. The AD9850 can realize the entirenumerical frequency combining. The core of the programmable DDS is the phase accumulator, it iscomposed of a ADR and a N bit phase register, N is for 24 ~ 32.After connecting to the accurate clock source and writing the frequency phase control word, AD9850 can generate the frequency-programmable and phase-programmable output of analog sinewave, which can be used as the direct frequency signal source or be transferred into rectangular wavethrough high-speed comparator.With the 125 MHz clock, 32-bit frequency control word can carry out the output frequency resolution ratio of AD9850 with 0.0291 Hz[4].DAC0832 moduleThe circuit exports the phase data sheet to DAC0832 from STM32 and gets corresponding waveform by DA converting. The step-by-step adjusting phase amounts can create arbitrary frequency, thePWM signal from the STM32 transfers into the corresponding voltage by low-pass filter, therefore,the referenced voltage of DAC0832 is controlled, furthermore, the output waveform extent is tunedappropriately. The digital to analog conversion circuit is shown in Fig.2Fig. 2 DAC circuitPWM converting DA circuitThe low-pass filtered PWM signal from STM32 is then stable using the voltage follower, whichwill yield a stable output voltage; the voltage can be adjusted by tuning the PWM dutyfactor. Thesystem output three PWM signals, which controls AD9850 output extent, dutyfactor and the outputextent of DAC0832, respectively,. Fig. 3 shows the PWM controls DA transferring circuit.Fig. 3 PWM controlled DA converting circuitFig. 4 Export amplification and the wave filtering circuit. (a) amplification circuit; (b) filteringcircuitAmplification and wave filtering circuitThe amplification circuit will export amplified wave form and modify the factor of amplification. Anexcellent smooth output waveform can be achieved by using the low-pass active power filtering. Theamplification circuit and the filtering circuit is showed in Fig. 4.Software designAnd the system software mainly include AD9850 driving module, DAC0832 driving module, thestep-by-step automation module, PWM-converting-DA module and uC/GUI figure supporting system implanted in procedure. The operation interface is full of humanization for themulti-windowpattern is adopted. The design process of the system software is shown in Fig. 5.Implanted uC/GUIThe numerical control signal source has used the uC/GUI software sufficiently to establish manywindows and control buttons. By means of invoking the corresponding windows and control with thefeedback information, the peripheral equipment operated under the control of the system.The external equipment is mainly separated into two drivers, the drive being an AD9850 moduleand DAC0832 module drive, respectively. The two modules can be controlled by means of the outsideinterruption and timing interruption.AD9850 DriveAD9850 has 40 control words, among them, 32-bit is used for frequency control, 5-bit is used for the phase control, 1-bit is used for the power source dormancy control, 2-bit is used to chooseoperation pattern.Fig. 5 Systematic procedure flow chartThis 40 control words may arrive at AD9850 by concurrence way or serial way, in the concurrenceway, 8 data highway generals can transfer the data to a register.After repeating 5 times, the 40-bit data is loaded into the frequency / phase data register (forrefreshing DDS output frequency and phase) at the FQ-UD rising edge, meanwhile, the addresspointer is reset to the first input registerThen the 8-bit data is loaded at the W-CLK rising edge, and the pointer is set to the next inputregister. After repeating 5 times of W-CLK rising edge, the W-CLK rising edge will work no longeruntil the reset signal comes or the address pointer is reset to the first input register by the FQ-UDrising edge.The procedure operate AD9850 module through the bottom function, asvoid ad9850(double frequency, //frequencyunsigned char phase, //phaseunsigned char mode, //patternunsigned char power //source)The DAC0832 driven moduleIn the design of the numerical control signal source, DAC0832 is defined as single buffered pattern, when the 8 bit Parallel data D0~D7 is input, the DA will transfer data in the CS.The bottom function of void DA0832(u8 value)can invoke Out_To_DDS0832(double Frequency,u8 type) function and control the defined wave form and frequency.This function is based on figure frequency composes principle, it transfers the input frequency intocorresponding control word, and then combing phase step-by-step expect, output wave form datasheet in memory.The extent and dutyfactor can be tuned through invoking Adjust_Vpp() and Adjust Duty() Step-by-step automation procedureA step-by-step automation procedure brick is added to the design to define the frequency range,step-by-step rate , step-by-step amounts , ascending or lapse, cycling pattern.The step-by-step automation function can be realized through invoking AutoStep(AutoStepStr*AS) and passing memory structure type to a function.Test the experiment and data analysisThe DDS numerical control signal source can import the various changeable control wordsby atouching screen, and then accurately control the signal frequency, dutyfactor, extent and phase. Figure6 shows the corresponding experimental wave forms.Fig. 6 The oscillograph exports experiment picture (a) 1 KHz wave form output; (b) 1 MHz waveform output; (c) 20 MHz wave form output.With the oscillograph testing, it shows that the circuit work stably and rightly. The variousparametric index exhibit fine numerical control effect.a. Output frequency range: 1Hz—30MHz,peak-to-peak value: 50mV~10V;dutyfactor:10%~100%, difference≤1%。
单片机中英文翻译英文部分1
Explored For Microcomputer ControlSystemGuohong Zou, Chengqi LiuAnshan NormalCollege MathematicsAnshan,ChinaAbstractThe appearance of single-chip Microcomputer is a important milestone computer technical development history,it has opened up computer technical another field---embedded(Embedded)comp uter field. Now, Single-chip Microcomputer has become work to control the computer most used extensively in field, militarily field and daily life. Single-Chip Microcomputer is a important branch of personal computer ,its development and application more and more arouse the attention of people. From Single-Chip Microcomputer birth so for, have developed for 100 kinds of last series near 1000 kind .This paper is the detailed introduction for Single-Chip Microcomputer. including MCU classification, principle and application of each respect such as outlined. Keywords:MCU;Application;chara cteristicsElectronic systems are used for handing information in the most general sense; this information may be telephone conversation, instrument read or a company’s accounts, but in each case the same main type of operation are involved: the processing, storage and transmission of information. in conventional electronic design these operations are combined at the function level; for example a counter, whether electronic or mechanical, stores the current and increments it by one as required. A system such as an electronic clock which employs counters has its storage and processing capabilities spread throughout the systembecause each counter is able to store and process numbers.Present day microprocessor based systems depart from this conventional approach by separating the three functions of processing, storage, and transmission into different section of the system. This partitioning into three main functions was devised by V on Neumann during the 1940s, and was not conceived especially for microcomputers.Almost every computer ever made has been designed with this structure, and despite the enormous range in their physical forms, they have all been of essentially the same basic design.In a microprocessor based system the processing will be performed in the microprocessor itself. The storage will be by means of memory circuits and the communication of information into and out of the system will be by means of special input/output(I/O) circuits. It would be impossible to identify a particular piece of hardware which performed the counting in a microprocessor based clock because the time would be stored in the memory and incremented at regular intervals but the microprocessor. However, the software which defined the system’s behavior would contain sections that performed as counters. The apparently rather abstract approach to the architecture of the microprocessor and its associated circuits allows it to be very flexible in use, since the system is defined almost entirely software. The design process is largely one of software engineering, and the similar problems of construction and maintenance which occur in conventional engineering are encountered when producing software.The illustrates how these three sections within a microcomputer are connected in terms of the communication of information within the machine. The system is controlled by the microprocessor which supervises the transfer of information between itself and the memory and input/output sections. The externalconnections relate to the rest (that is, the non-computer part) of the engineering system.Three Sections of a Typical MicrocomputerAlthough only one storage section has been shown in the diagram, in practice two distinct types of memory RAM and ROM are used. In each case, the word ‘memory’ is rather inappropriate since a computers memory is more like a filing cabinet in concept; information is stored in a set of numbered ‘boxes’ and it is referenced by the serial number of the ‘box’ in question.Microcomputers use RAM (Random Access Memory) into which data can be written and from which data can be read again when needed. This data can be read back from the memory in any sequence desired, and not necessarily the same order in which it was written, hence the expression ‘random’ access memory. Another type of ROM (Read Only Memory) is used to hold fixed patterns of information which cannot be affected by the microprocessor; these patterns are not lost when power is removed and are normally used to hold the program which defines the behavior of a microprocessor based system. ROMs can be read like RAMs, but unlike RAMs they cannot be used to store variable information. Some ROMs have their data patterns put in during manufacture, while others are programmable by the user by means of special equipment and are called programmable ROMs. The widely used programmable ROMs are erasable by means of special ultraviolet lamps and are referred to as EPROMs, short for ErasableProgrammable Read Only Memories. Other new types of device can be erased electrically without the need for ultraviolet light, which are called Electrically Erasable Programmable Read Only Memories, EEPROMs.The microprocessor processesdata under the control of the program, controlling the flow of information to and from memory and input/output devices. Some input/output devices are general-purpose types while others are designed for controlling special hardware such as disc drives or controlling information transmission to other computers. Most types of I/O devices are programmable to some extent, allowing different modes of operation, while some actually contain special-purpose microprocessors to permit quite complex operations to be carried out without directly involving the main microprocessor.The microprocessor processes data under the control of the program, controlling the flow of information to and from memory and input/output devices. Some input/output devices are general-purpose types while others are designed for controlling special hardware such as disc drives or controlling information transmission to other computers. Most types of I/O devices are programmable to some extent, allowing different modes of operation, while some actually contain special-purpose microprocessors to permit quite complex operations to be carried out without directly involving the main microprocessor.The microprocessor , memory and input/output circuit may all be contained on the same integrated circuit provided that the application does not require too much program or data storage . This is usually the case in low-cost application such as the controllers used in microwave ovens and automatic washing machines . The use of single package allows considerable cost savings to e made when articles are manufactured in large quantities . As technology develops , more and more powerful processors and larger and larger amounts of memory are being incorporated into single chip microcomputers with resulting saving in assembly costs in the final products . For the foreseeable future , however , it will continue to be necessary to interconnect a number of integratedcircuits to make a microcomputer whenever larger amounts of storage or input/output are required.Another major engineering application of microcomputers is in process control. Here the presence of the microcomputer is usually more apparent to the user because provision is normally made for programming the microcomputer for the particular application. In process control applications the benefits lf fitting the entire system on to single chip are usually outweighed by the high design cost involved, because this sort lf equipment is produced in smaller quantities. Moreover, process controllers are usually more complicated so that it is more difficult to make them as single integrated circuits. Two approaches are possible; the controller can be implemented as a general-purpose microcomputer rather like a more robust version lf a hobby computer, or as a ‘packaged’ system, signed for replacing controllers based on older technologies such as electromagnetic relays. In the former case the system would probably be programmed in conventional programming languages such as the ones to9 be introduced later, while in the other case a special-purpose language might be used, for example one which allowed the function of the controller to be described in terms of relay interconnections, In either case programs can be stored in RAM, which allows them to be altered to suit changes in application, but this makes the overall system vulnerable to loss lf power unless batteries are used to ensure continuity of supply. Alternatively programs can be stored in ROM, in which case they virtually become part of the electronic ‘hardware’ and are often referred to as firmware. More sophisticated process controllers require minicomputers for their implementation, although the use lf large scale integrated circuits ‘the distinction between mini and microcomputers, Products and process controllers of various kinds represent the majority of present-day microcomputer applications, the exact figuresdepending on one’s interpretation of the word ‘product’. Virtually all engineering and scientific uses of microcomputers can be assigned to one or other of these categories. But in the system we most study Pressure and Pressure Transmitters. Pressure arises when a force is applied over an area. Provided the force is one Newton and uniformly over the area of one square meters, the pressure has been designated one Pascal. Pressure is a universal processing condition. It is also a condition of life on the planet: we live at the bottom of an atmospheric ocean that extends upward for many miles. This mass of air has weight, and this weight pressing downward causes atmospheric pressure. Water, a fundamental necessity of life, is supplied to most of us under pressure. In the typical process plant, pressure influences boiling point temperatures, condensing point temperatures, process efficiency, costs, and other important factors. The measurement and control of pressure or lack of it-vacuum-in the typical process plant is critical.The working instruments in the plant usually include simple pressure gauges, precision recorders and indicators, and pneumatic and electronic pressure transmitters. A pressure transmitter makes a pressure measurement and generates either a pneumatic or electrical signal output that is proportional to the pressure being sensed.In the process plant, it is impractical to locate the control instruments out in the place near the process. It is also true that most measurements are not easily transmitted from some remote location. Pressure measurement is an exception, but if a high pressure of some dangerous chemical is to be indicated or recorded several hundred feet from the point of measurement, a hazard may be from the pressure or from the chemical carried.To eliminate this problem, a signal transmission system was developed. This system is usually either pneumatic or electrical. And control instruments in one location.This makes it practical for a minimum number of operators to run the plant efficiently.When a pneumatic transmission system is employed, the measurement signal is converted into pneumatic signal by the transmitter scaled from 0 to 100 percent of the measurement value. This transmitter is mounted close to the point of measurement in the process. The transmitter output-air pressure for a pneumatic transmitter-is piped to the recording or control instrument. The standard output range for a pneumatic transmitter is 20 to 100kPa, which is almost universally used.When an electronic pressure transmitter is used, the pressure is converted to electrical signal that may be current or voltage. Its standard range is from 4 to 20mA DC for current signal or from 1 to 5V DC for voltage signal. Nowadays, another type of electrical signal, which is becoming common, is the digital or discrete signal. The use of instruments and control systems based on computer or forcing increased use of this typeof signal.Sometimes it is important for analysis to obtain the parameters that describe the sensor/transmitter behavior. The gain is fairly simple to obtain once the span is known. Consider an electronic pressure transmitter with a range of 0~600kPa[2].The gain isdefined as the change in output divided by the change in input. In this case, the output is electrical signal (4~20mA DC) and the input is process pressure (0~600kPa). Thus the gain. Beside we must measure Temperature Temperature measurement is important in industrial control, as direct indications of system or product state and as indirect indications of such factors as reaction rates, energy flow, turbine efficiency, and lubricant quality. Present temperature scales have been in use for about 200 years, the earliest instruments were based on the thermal expansion of gases and liquids. Such filled systems are stillkPamAkPamAkPakPamAmAKr027.060016600420==--=employed, although many other types of instruments are available. Representative temperature sensors include: filled thermal systems, liquid-in-glass thermometers, thermocouples, resistance temperature detectors, thermostats, bimetallic devices, optical and radiation pyrometers and temperature-sensitive paints.Advantages of electrical systems include high accuracy and sensitivity, practicality of switching or scanning several measurements points, larger distances possible between measuring elements and controllers, replacement of components(rather than complete system), fast response, and ability to measure higher temperature. Among the electrical temperature sensors, thermocouples and resistance temperature detectors are most widely used.DescriptionThe AT89C51 is a low-power, high-performance CMOS 8-bit microcomputer with 4K bytes of Flash programmable and erasable read only memory (PEROM). The device is manufactured using Atmel’s high-density nonvolatile memory technology and is compatible with the industry-standard MCS-51 instruction[4]set and pinout. The on-chip Flash allows the program memory to be reprogrammed in-system or by a conventional nonvolatile memory programmer. By combining a versatile 8-bit CPU with Flash on a monolithic chip, the Atmel AT89C51[1] is a powerful microcomputer which provides a highly-flexible and cost-effective solution to many embedded control applications.Function characteristicThe AT89C51 provides the following standard features: 4K bytes of Flash, 128 bytes of RAM, 32 I/O lines, two 16-bit timer/counters, a five vector two-level interrupt architecture, a full duplex serial port, on-chip oscillator and clock circuitry. In addition, the AT89C51 is designed with static logic for operation down to zero frequency and supports two software selectable power savingmodes. The Idle Mode stops the CPU while allowing the RAM, timer/counters, serial port and interrupt system to continue functioning. The Power-down Mode saves the RAM contents but freezes the oscillator disabling all other chip functions until the next hardware reset.Pin DescriptionVCC:Supply voltage.GND:Ground.Port 0:Port 0 is an 8-bit open-drain bi-directional I/O port. As an output port, each pin can sink eight TTL inputs. When 1s are written to port 0 pins, the pins can be used as highimpedance 0 may also be configured to be the multiplexed loworder address/data bus during accesses to external program and data memory. In this mode P0 has internal 0 also receives the code bytes during Flash programming,and outputs the code bytes during programverification. External pullups are required during programverification.Port 1:Port 1 is an 8-bit bi-directional I/O port with internal pullups[1].The Port 1 output buffers can sink/source four TTL 1s are written to Port 1 pins they are pulled high by the internal pullups and can be used as inputs. As inputs,Port 1 pins that are externally being pulled low will source current (IIL) because of the internal 1 also receives the low-order address bytes during Flash programming and verification.Port 2:Port 2 is an 8-bit bi-directional I/O port with internal Port 2 output buffers can sink/source four TTL 1s are written to Port 2 pins they are pulled high by the internal pullups and can be used as inputs. As inputs,Port 2 pins that are externally being pulled low will source current, because of the internal 2 emits[2] the high-order address byte during fetches from external program memory and during accesses to external data memory that use 16-bit addresses. In this application, it uses strong internal pullupswhen emitting 1s.During accesses to external data memory that use 8-bit addresses, Port 2 emits the contents of the P2 Special Function 2 also receives the high-order address bits and some control signals during Flash programming and verification.Port 3 :Port 3 is an 8-bit bi-directional I/O port with internal Port 3 output buffers can sink/source four TTL 1s are written to Port 3 pins they are pulled high by the internal pullups and can be used as inputs. As inputs,Port 3 pins that are externally being pulled low will source current (IIL) because of the 3 also serves the functions of various special features of the AT89C51 as listed below:Port 3 also receives some control signals for Flash programming and verification.RST:Reset input. A high on this pin for two machine cycles while the oscillator is running resets the device. ALE/PROG:Address Latch Enable output pulse for latching the low byte of the address during accesses to external memory. This pin is also the program pulse input (PROG) during Flash normal operation ALE is emitted at a constant rate of 1/6 the oscillator frequency, and may be used for external timing or clocking purposes. Note, however, that one ALE pulse is skipped during each access to external Data Memory.If desired, ALE operation can be disabled by setting bit 0 of SFR location 8EH. With the bit set, ALE is active only during a MOVX or MOVC[5]instruction. Otherwise, the pin is weakly pulled high. Setting the ALE-disable bit has no effect if the microcontroller is in external execution mode.PSEN :Program Store Enable is the read strobe to external program the AT89C51 is executing code from external program memory, PSEN is activated twice each machine cycle, except that two PSEN activationsare skipped during each access to external data memory.EA/VPP:External Access Enable. EA must be strapped to GND in order to enable the device to fetch code from external program memory locations starting at 0000H up to FFFFH. Note, however, that if lock bit 1 is programmed, EA will be internally latched on should be strapped to VCC for internal program pin also receives the 12-volt programming enable voltage(VPP) during Flash programming, for parts that require12-volt VPP.XTAL1:Input to the inverting oscillator amplifier and input to the internal clock operating circuit.XTAL2:Output from the inverting oscillator amplifier.Oscillator CharacteristicsXTAL1 and XTAL2 are the input and output, respectively,of an inverting amplifier which can be configured for use as an on-chip oscillator, as shown in Figure a quartz crystal or ceramic resonator may be used. To drive the device from an external clock source, XTAL2 should be left unconnected while XTAL1 is driven as shown in Figure are no requirements on the duty cycle of the external clock signal, since the input to the internal clocking circuitry is through a divide-by-two flip-flop, but minimum and maximum voltage high and low time specifications must be observed.References[1] Henning Dierks. PLC-automata: a new class of implementable real-time automate.Theotetical computer science, 2001, 253:61-93.[2] David G. Johnson. Programmable Controllers for Factory Automation. New York and Basel: Marcel Dekker Inc,1987.[3] Can Saygin, Firat Kahraman. A Web-based Programmable Logic Controller laboratory for manufacturing engineering education. The International Journal of Advanced Manufacturing Technology, 2004,24(7):590-598.[4] . Lee, . Hsu. An improved evaluation of Ladder logic diagrams and Petri nets for the sequence controller design in manufacturing systems. The International Journal of Advanced Manufacturing Technology, 2004, 2(5):279-287.[5] John, Karl-Heinz, Michael. Programming Industrial Automation System, Berlin. New York: Springer, 2001.。
单片机外文文献翻译
外文文献一单片机简介单片机是一种集成在电路芯片,是采用超大规模集成电路技术把具有数据处理能力的中央处理器CPU随机存储器RAM、只读存储器ROM、多种I/O口和中断系统、定时器/计时器等功能(可能还包括显示驱动电路、脉宽调制电路、模拟多路转换器、A/D转换器等电路)集成到一块硅片上构成的一个小而完善的计算机系统。
单片机也被称为微控制器(Microcontroller),是因为它最早被用在工业控制领域。
单片机由芯片内仅有CPU的专用处理器发展而来。
最早的设计理念是通过将大量外围设备和CPU集成在一个芯片中,使计算机系统更小,更容易集成进复杂的而对体积要求严格的控制设备当中。
INTEL的Z80是最早按照这种思想设计出的处理器,从此以后,单片机和专用处理器的发展便分道扬镳。
二、单片机的发展趋势现在可以说单片机是百花齐放,百家争鸣的时期,世界上各大芯片制造公司都推出了自己的单片机,从8位、16位到32位,数不胜数,应有尽有,有与主流C51系列兼容的,也有不兼容的,但它们各具特色,互成互补,为单片机的应用提供广阔的天地。
纵观单片机的发展过程,可以预示单片机的发展趋势,大致有:1.低功耗CMOSMCS-51系列的8031推出时的功耗达630mW,而现在的单片机普遍都在100mW左右,随着对单片机功耗要求越来越低,现在的各个单片机制造商基本都采用了CMOS(互补金属氧化物半导体工艺)。
象80C51就采用了HMOS(即高密度金属氧化物半导体工艺)和CHMOS(互补高密度金属氧化物半导体工艺)。
CMOS虽然功耗较低,但由于其物理特征决定其工作速度不够高,而CHMOS则具备了高速和低功耗的特点,这些特征,更适合于在要求低功耗象电池供电的应用场合。
所以这种工艺将是今后一段时期单片机发展的主要途径。
2.微型单片化现在常规的单片机普遍都是将中央处理器(CPU)、随机存取数据存储(RAM)、只读程序存储器(ROM)、并行和串行通信接口,中断系统、定时电路、时钟电路集成在一块单一的芯片上,增强型的单片机集成了如A/D转换器、PMW(脉宽调制电路)、WDT(看门狗)、有些单片机将LCD(液晶)驱动电路都集成在单一的芯片上,这样单片机包含的单元电路就更多,功能就越强大。
单片机外文文献翻译之欧阳育创编

单片机单片机也被称为微控制器(Microcontroller Unit),常用英文字母的缩写MCU表示单片机,它最早是被用在工业控制领域。
单片机由芯片内仅有CPU的专用处理器发展而来。
最早的设计理念是通过将大量外围设备和CPU集成在一个芯片中,使计算机系统更小,更容易集成进复杂的而对体积要求严格的控制设备当中。
INTEL的Z80是最早按照这种思想设计出的处理器,从此以后,单片机和专用处理器的发展便分道扬镳。
早期的单片机都是8位或4位的。
其中最成功的是INTEL 的8031,因为简单可靠而性能不错获得了很大的好评。
此后在8031上发展出了MCS51系列单片机系统。
基于这一系统的单片机系统直到现在还在广泛使用。
随着工业控制领域要求的提高,开始出现了16位单片机,但因为性价比不理想并未得到很广泛的应用。
90年代后随着消费电子产品大发展,单片机技术得到了巨大提高。
随着INTEL i960系列特别是后来的ARM系列的广泛应用,32位单片机迅速取代16位单片机的高端地位,并且进入主流市场。
而传统的8位单片机的性能也得到了飞速提高,处理能力比起80年代提高了数百倍。
目前,高端的32位单片机主频已经超过300MHz,性能直追90年代中期的专用处理器,而普通的型号出厂价格跌落至1美元,最高端[1]的型号也只有10美元。
当代单片机系统已经不再只在裸机环境下开发和使用,大量专用的嵌入式操作系统被广泛应用在全系列的单片机上。
而在作为掌上电脑和手机核心处理的高端单片机甚至可以直接使用专用的Windows和Linux操作系统。
单片机比专用处理器更适合应用于嵌入式系统,因此它得到了最多的应用。
事实上单片机是世界上数量最多的计算机。
现代人类生活中所用的几乎每件电子和机械产品中都会集成有单片机。
手机、电话、计算器、家用电器、电子玩具、掌上电脑以及鼠标等电脑配件中都配有1-2部单片机。
而个人电脑中也会有为数不少的单片机在工作。
汽车上一般配备40多部单片机,复杂的工业控制系统上甚至可能有数百台单片机在同时工作!单片机的数量不仅远超过PC机和其他计算的总和,甚至比人类的数量还要多。
基于STM32的数据采集系统英文文献

Design of the Data Acquisition System Based on STM32ABSTRACTEarly detection of failures in machinery equipments is one of the mostimportant concerns to industry。
In order tomonitor effective of rotating machinery, we development a micro-controller uC/OS—II system of signal acquisition system based on STM32 in this paper。
we have given the whole design scheme of system and the multi-channel vibration signal in axis X,Y and Z of the rotary shaft can be acquired rapidly and display in real-time. Our system has the character of simple structure,low power consumption, miniaturization.Keywords:STM32;data acquisition;embedded system;uC/OS-II;1.1. IntroductionThe real-time acquisition of vibration in rotating machinery can effectively predict,assess and diagnose equipment operation state, the industry gets vibration data acquisition Rapidly and analysis in real-time can monitor the rotating machinery state and guarantee the safe running of the equipment. In order to prevent failure, reduce maintenance time, improve the economic efficiency,The purpose of fault diagnosis system can detect these devices through the vibration signal acquisition of rotating machinery,and process the data acquisition, then it will make timely judgment of running state of equipment .While the data acquisition module is the core part of the fault diagnosis system [1—4].The practical application in the industrial field,is the equipment operating parameters will be acquired to monitor equipment operating state。
外文文献及翻译单片机(2)

单片机介绍单片机也被称为微控制器<Microcontroller Unit),常用英文字母的缩写MCU 表示单片机,它最早是被用在工业控制领域。
单片机由芯片内仅有CPU的专用处理器发展而来。
最早的设计理念是通过将大量外围设备和CPU集成在一个芯片中,使计算机系统更小,更容易集成进复杂的而对体积要求严格的控制设备当中。
INTEL的Z80是最早按照这种思想设计出的处理器,从此以后,单片机和专用处理器的发展便分道扬镳。
早期的单片机都是8位或4位的。
其中最成功的是INTEL的8031,因为简单可靠而性能不错获得了很大的好评。
此后在8031上发展出了MCS51系列单片机系统。
基于这一系统的单片机系统直到现在还在广泛使用。
随着工业控制领域要求的提高,开始出现了16位单片机,但因为性价比不理想并未得到很广泛的应用。
90年代后随着消费电子产品大发展,单片机技术得到了巨大提高。
随着INTEL i960系列特别是后来的ARM系列的广泛应用,32位单片机迅速取代16位单片机的高端地位,并且进入主流市场。
而传统的8位单片机的性能也得到了飞速提高,处理能力比起80年代提高了数百倍。
目前,高端的32位单片机主频已经超过300MHz,性能直追90年代中期的专用处理器,而普通的型号出厂价格跌落至1美元,最高端的型号也只有10美元。
当代单片机系统已经不再只在裸机环境下开发和使用,大量专用的嵌入式操作系统被广泛应用在全系列的单片机上。
而在作为掌上电脑和手机核心处理的高端单片机甚至可以直接使用专用的Windows和Linux操作系统。
单片机比专用处理器更适合应用于嵌入式系统,因此它得到了最多的应用。
事实上单片机是世界上数量最多的计算机。
现代人类生活中所用的几乎每件电子和机械产品中都会集成有单片机。
手机、电话、计算器、家用电器、电子玩具、掌上电脑以及鼠标等电脑配件中都配有1-2部单片机。
而个人电脑中也会有为数不少的单片机在工作。
单片机外文文献翻译(2024)
引言:单片机(Microcontroller)是一种广泛应用于嵌入式系统中的小型计算机芯片。
它集成了处理器核心、存储器、外设接口和时钟电路等核心部件,可以独立运行。
随着全球化的发展,外文文献对于学习和研究单片机领域来说至关重要。
本文翻译的外文文献《MicrocontrollerbasedTrafficLightControlSystem》详细介绍了基于单片机的交通信号灯控制系统。
概述:交通信号灯控制是现代都市交通系统中至关重要的一环。
传统的交通信号灯控制系统通常由定时器控制,不能根据实际交通情况动态调整信号灯的时间。
而基于单片机的交通信号灯控制系统可以实现根据实时交通流量来动态调整信号灯的时间,优化交通效率。
本文将详细介绍该系统的设计和实现。
正文:一、单片机选型1.1.CPU性能:本文选择了一款高性能的32位单片机作为控制核心,它具有较高的处理能力和较大的存储器容量,可以同时处理多条交通路口的信号控制。
1.2.外设接口:该单片机具有丰富的外设接口,可以与交通信号灯、传感器和通信设备等进行连接,实现信号控制和数据交互。
1.3.低功耗设计:为了节约能源和延长系统寿命,在单片机选型时考虑了低功耗设计,降低系统运行的能耗。
二、硬件设计2.1.交通信号灯:在设计交通信号灯时,考虑了日夜可见性和能耗。
采用了高亮度LED作为信号灯光源,同时添加了光敏传感器控制信号灯的亮度,以满足不同时间段的亮度需求。
2.2.传感器:通过安装车辆感应器和行人感应器等传感器,可以在实时监测交通流量的基础上,智能调整信号灯时间,提高路口的交通效率。
2.3.通信设备:在交通信号灯控制系统中引入了通信设备,可以实现各交通路口之间的信息交互和协调控制,提高整体交通系统的效率。
三、软件设计3.1.程序架构:采用了多任务的实时操作系统,将交通信号灯控制、传感器数据处理和通信设备控制等功能分别封装成不同的任务,实现了系统的高效运行和任务调度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
外文译英文原文:STM32 MicrocontrollerIntroductionRequirements based STM32 family is designed for high-performance, low-cost, low-power embedded applications designed specifically for ARM Cortex-M3 core. According to the performance into two different series: STM32F103 "Enhanced〞 series and STM32F101 "Basic" series. Enhanced Series clock frequency of 72MHz, the highest performance of similar products product; basic clock frequency of 36MHz, 16-bit product prices get more than 16 products significantly enhance the performance and is 16 product users the best choice. Both series have built-in 32K to 128K of flash memory, the difference is the maximum capacity of the SRAM and peripheral combinations. At 72MHz, executing from Flash, STM32 power consumption 36mA, are 32 products on the market s lowest power, the equivalent of 0.5niA/MHz.STM32F103 Performance Characteristics1)Kernel. ARM32 bit CPU, the maximum operating frequency of 72MHz,1.25DMIPS/MHz. Single-cycle multiply and hardware divide.2)Memory. Integrated on-chip 32-512KB of Flash memory. 6-64KB SRAM memory.3)Clock, reset, and power management. 2.0-3.6V power supply and I/O interface, the drive voltage. POR, PDR and programmable voltage detector. 4-16MHz crystal. Embedded factory tuned 8MHz RC oscillator circuit. 40 kHz internal RC oscillator circuit. CPU clock for the PLL. With calibration for the RTC 32kHz crystal.4)Low power consumption. Three kinds of low-power mode. Sleep, stop, standby mode. For RTC and backup registers supply VBAT.5)Debug mode. Serial debugging and JTAG interface.6)Direct data storage. 12-channel direct data storage controller. Supported peripherals: timers, ADC, DAC, SPI, IIC and USART.7)Up to a maximum of 112 fast I / O ports. Depending on the modeL there are 26,37,51,80, and 112 I/O ports, all ports can be mapped to 16 external interrupt vectors. In addition to the analog input, all of them can accept the input of 5V or less.8)Up to a maximum of 11 timers. Four 16-bit timers, each with 4 IC / OC / PWM orpulse counter. 2 16 6-channel advanced control timer: up to 6 channels can be used for PWM output. 2 watchdog timer. Systick tinier: 24 down counter. Two 16-bit basic timer for driving DAC.9)Up to a maximum of 13 communication interfaces. 2 IIC interface. 5 USART interfaces. 3 SPI interface, two and IIS reuse. CAN interface. USB 2.0 full-speed interface. SDIO interface.System Function1)Integration of embedded Flash and SRAM memory ARM Cortex-M3 core. And 8/16 equipment compared, ARM Cortex-M3 32-bit RISC processor provides a higher code efficiency. STM32F103xx microcontrollers with an embedded ARM core, so it can be compatible with all ARM tools and software.2)Embedded Flash memory and RAM memory. Built up to 512KB embedded Flash, can be used to store programs and data. Up to 64KB of embedded SRAM clock speed of the CPU can read and write.3)Variable static memory. Variable static memory with 4 chip selects, supports four modes: Flash, RAM, PSRAM, NOR and NAND. After three FSMC interrupt lines connected to the OR after the nested vector interrupt controller. No read / write FIFO, except PCCARD, the code is executed from external memory is not supported Boot, the target frequency is equal to SYSCLK / 2, so the time when the system clock is 72MHz, 36MHz conducted in accordance with external access.4)Nested Vectored Internipt Controller. Can handle 43 maskable interrupt channels, providing 16 interrupt priority levels. Tightly coupled nested vectored intenupt controller to achieve lower latency interrupt handling directly passed to the kernel interrupt vector table entry address, tightly coupled nested vectored interrupt controller kernel interface, allowing early treatment interruption, the latter to be more high-priority interrupt processing, support tail chain, auto-save processor state terrupts automatically restored on interrupt exit, no instructions intervention.5)External internipt / event controller. External interrupt / event controller consists for 19 to generate interrupt / event requests edge detector lines. Each line can be individually configured to select the trigger event, it can be individually masked. There is a pending interrupt request registers to maintain state. When an external line appear longer than the internal APB2 clock-cycle pulse, the external interrupt / event controller is able to detect. Up to 112 GPIO connected to the 16 external internipt lines.6)Clocks and startup. At boot time or to the system clock selection, but the reset whenthe internal 8MHz crystal oscillator is selected as the CPU clock. Can choose a 4-16MHz external clock, and will be monitored to determine the success. During this time, the interrupt controller is disabled and the software management is subsequently disabled. Also, if there is a need, PLL clock internipt management fully available. Comparator can be used more pre-configuration of the AHB frequency, including high-speed and low-speed APB APB, APB highest frequency of high-speed 72MHz, low-speed APB highest frequency of 36MHz.Architectural AdvantagesIn addition to the new features Enhanced peripheral interfaces, STM32 series also interconnect with other STM32 microcontrollers offer the same standard interface, such sharing of peripherals to enhance the entire product family, application flexibility, so that developers can a plurality of design reuse the same software. New STM32 standard peripherals include 10 timers, two 12-bit ADC, two 12-bit DAC, two I2C interfaces, five USART interfaces and three SPI ports. There are 12 new products peripherals direct data storage channel, there is a CRC calculation unit, like other STM32 microcontrollers, the supports 96 unique identifier.New series also has followed the STM32 microcontroller family of products low voltage and energy saving are two advantages. 2.0V to 3.6V operating voltage range compatible with the mainstream of battery technologies such as lithium batteries and nickel-metal hydride batteries, the package also features a battery operation mode dedicated pin Vbat. 72MHz frequency to execute code from flash consumes only 27mA current. There are four low-power mode, the current consumption can be reduced to two microamps. Quick Start from low power mode to save energy too; starting circuit using STM32 internally generated 8MHz signal, the microcontroller from stop mode when you wake up with less than 6 microseconds.中文译:单片机STM321STM32的介绍STM32系列基于专为要求高性能、低本钱、低功耗的嵌入式应用专门设计的ARMCortex-M3内核.按性能分成两个不同的系列:STM32F103 “增强型〞系列和STM32F101 “根本型〞系列.增强型系列时钟频率到达72MHz,是同类产品中性能最高的产品;根本型时钟频率为36MHz,以16位产品的价格得到比16位产品大幅提升的性能,是16位产品用户的最正确选择.两个系列都内置32K 到128K 的闪存,不同的是SRAM的最大容量和外设接口的组合.时钟频率72MHz时,从闪存执行代码,STM32功耗36mA,是32位市场上功耗最低的产品,相当于0.5mA/MHz.2STM32F103性能特点1〕内核.ARM32位CPU,最高工作频率72MHz, 1.25DMIPS/MHzo单周期乘法和硬件除法.2〕存储器.片上集成32-512KB的Flash存储器.6-64KB的SRAM存储器.3〕时钟、复位和电源治理.2.0-3.6V的电源供电和I/O接口的驱动电压. POR、PDR和可编程的电压探测器.4-16MHZ的晶振.内嵌出厂前调校的8MHz RC振荡电路.内部40 kHz的RC振荡电路.用于CPU时钟的PLL.带校准用于RTC的32kHz的晶振.4〕低功耗.3种低功耗模式:休眠,停止,待机模式.为RTC和备份存放器供电的VBAT.5〕调试模式.串行调试和JTAG接口.6〕直接数据存储.12通道直接数据存储限制器.支持的外设:定时器,ADC, DAC, SPI, IIC 和USART.7〕最多高达112个的快速I/O端口.根据型号的不同,有26, 37, 51, 80, 和112的I/O端口,所有的端口都可以映射到16个外部中断向量.除了模拟输入,所有的都可以接受5V以内的输入.8〕最多多达11个定时器.4个16位定时器,每个定时器有4个IC/OC/PWM 或者脉冲计数器.2个16位的6通道高级限制定时器:最多6个通道可用于PWM 输出.2个看门狗定时器.Systick定时器:24位倒计数器.2个16位根本定时器用于驱动DACo9〕最多多达13个通信接口.2个HC接口.5个USART接口.3个SPI接口,两个和IIS复用.CAN接口.USB 2.0全速接口.SDIO接口.3系统作用1〕集成嵌入式Hash和SRAM存储器的ARM Cortex-M3内核.和8/16位设备相比,ARM Cortex-M3 32位RISC处理器提供了更高的代码效率. STM32F103xx微限制器带有一个嵌入式的ARM核,所以可以兼容所有的ARM 工具和软件.2〕嵌入式Flash存储器和RAM存储器.内置多达512KB的嵌入式Flash, 可用于存储程序和数据.多达64KB的嵌入式SRAM可以以CPU的时钟速度进行读写.3〕可变静态存储器.可变静态存储器带有4个片选,支持四种模式:Flash, RAM, PSRAM, NOR和NANDo 3个FSMC中断线经过OR后连接到嵌套矢量中断限制器.没有读/写FIFO,除PCCARD之外,代码都是从外部存储器执行, 不支持Boot,目标频率等于SYSCLK/2,所以当系统时钟是72MHz时' 外部访问根据36MHz进行.4〕嵌套矢量中断限制器.可以处理43个可屏蔽中断通道,提供16个中断优先级.紧密耦合的嵌套矢量中断限制器实现了更低的中断处理延迟,直接向内核传递中断入口向量表地址,紧密耦合的嵌套矢量中断限制器内核接口,允许中断提前处理,对后到的更高优先级的中断进行处理,支持尾链,自动保存处理器状态,中断入口在中断退出时自动恢复,不需要指令干预.5〕外部中断/事件限制器.外部中断/事件限制器由用于19条产生中断/事件请求的边沿探测器线组成.每条线可以被单独配置用于选择触发事件,也可以被单独屏蔽.有一个挂起存放器来维护中断请求的状态.当外部线上出现长度超过内部APB2时钟周期的脉冲时,外部中断/事件限制器能够探测到.多达112个GPIO连接到16个外部中断线.6〕时钟和启动.在启动的时候还是要进行系统时钟选择,但复位的时候内部8MHz的晶振被选用作CPU时钟.可以选择一个外部的4-16MHZ的时钟,并且会被监视来判定是否成功.在这期间,限制器被禁止并且软件中断治理也随后被禁止.同时,如果有需要,PLL时钟的中断治理完全可用.多个预比拟器可以用于配置AHB频率,包括高速APB和低速APB,高速APB最高的频率为72MHz, 低速APB最高的频率为36MHzo4架构优势除新增的功能强化型外设接口外,STM32互连系列还提供与其它STM32微限制器相同的标准接口,这种外设共用性提升了整个产品家族的应用灵活性,使开发人员可以在多个设计中重复使用同一个软件.新STM32的标准外设包括10 个定时器、两个12位模数转换器、两个12位数模转换器、两个12c接口、五个USART接口和三个SPI端口.新产品外设共有12条直接数据存储通道,还有一个CRC计算单元,像其它STM32微限制器一样,支持96位唯一标识码.新系列微限制器还沿续了STM32产品家族的低电压和节能两大优点.2.0V 到3.6V的工作电压范围兼容主流的电池技术,如锂电池和银氢电池,封装还设有一个电池工作模式专用引脚Vbato以72MHz频率从闪存执行代码,仅消耗27mA 电流.低功耗模式共有四种,可将电流消耗降至两微安.从低功耗模式快速启动也同样节省电能;启动电路使用STM32内部生成的8MHz信号,将微控制器从停止模式唤醒用时小于6微秒.。