阵列感应讲课
极化敏感阵列_天线的极化
极化敏感阵列的定义及结构
▪空间电磁信号是矢量信号,是六维复矢量, 如果传感器阵列能够获得电磁矢量的全部或者 部分(至少高于一维),则称为极化敏感阵列
极化敏感阵列的性能优势
❶较强的抗干扰能力 ❷稳健的检测能力 ❸较高的分辨能力 ❹极化多址能力
电磁波的极化及其表征
• 设单色T瞬时值EM波沿+z方向传播,则有: 瞬时值
▪根据不同坐标基下坐标矢量之间可得到电场 矢量在直角坐标中的坐标矢量为:
▪根据电场磁场以及坡印廷矢量间的关系有:
▪磁场矢量在直角坐标系中的坐标矢量为: ▪因此电场磁场在直角坐标系中的坐标矢量为:
知识回顾 Knowledge Review
电磁波的极化及其几何表征
• 电磁波的极化信息主要取决于等相位面上 的两个正交方向的幅度比和相位差 旋转矩阵
椭圆率矢量
电磁波的极化及其相位表征
• 相位描述子,复电场矢量可表述为: • Y方向电场幅度与X方向幅度之比 • Y 方向电场和X方向电场的相位差
空间电磁信号极化域-空域联合表征
电磁波的极化及其相位表征
天线的极化及极化敏感阵列介绍
郭远明
天线的极化
电偶极子天线
E面
H面
E面
H面
天线的极化
电磁波的传播方式
麦克思维方程组
天线的极化
▪ 定义:该天线在给定空间方向上远区无线电波的极化,通常指其最 大辐射方向上波的极化。
水平极化
ቤተ መጻሕፍቲ ባይዱ
电场方向
种类
垂直极化 线极化
电场终端轨迹
圆极化
左旋椭圆极化
椭圆极化
右旋椭圆极化 天线极化与来波方向一致称作极化匹配,否则为极化失配,设角度 为ɑ,则失配因子为cos(ɑ)
阵列信号处理原理、方法与新

阵列信号处理原理、方法与新
阵列信号处理是一种利用多个传感器(如麦克风、天线等)获取信号,通过信号处理
算法将其合成为一个复合信号,并在此基础上分离、定位、去除、增强等操作的新型信号
处理技术。
在目前的通信、雷达、声学、医学等领域都有广泛应用。
阵列信号处理的基本原理是通过获取多个传感器采样的信号,根据它们的相对位置和
接收到信号的时间差异,构建一个信号阵列,然后通过信号合成的方法将这些信号合成为
一个复合信号。
根据复合信号的特征,进行后续的信号处理。
阵列信号处理的主要方法包括波束形成、空间滤波、方向估计等。
波束形成的主要目
的是聚焦探测器的接收能力,使其在目标方向上获得更高的灵敏度。
空间滤波的主要目的
是通过利用阵列传感器之间的相对位置和互相之间的传感器响应差异,对信号进行滤波,
达到抑制噪声、增强信号等效果。
方向估计则是通过对信号在阵列中传播的速度和波束方
向的监测,对信号的方向进行估计。
阵列信号处理技术的应用十分广泛,其中最为常见的应用领域是通信、雷达和声学等。
在通信中,利用阵列信号处理技术进行信号增强和去除干扰,并根据信号的传播速度和方
向进行信号定位和跟踪。
在雷达中,利用阵列信号处理技术对雷达信号进行波束形成和目
标方向估计,提高雷达的探测效率和目标定位精度。
在声学中,利用阵列信号处理技术进
行声波信号的定位、分离和降噪等操作,提高语音识别和音频娱乐的质量。
总之,阵列信号处理技术是一种高效、可靠的信号处理方法,可以广泛应用于各个领域,有着十分重要的实际应用价值。
天线工程设计基础课件:阵列天线

性,根据电磁波在空间相互干涉的原理,把具有相同结构、
相同尺寸的某种基本天线按一定规律排列在一起,并通过适
当的激励达到预定的辐射特性,这种多个辐射源的结构称为
阵列天线。根据天线阵列单元的排列形式,阵列天线可以分
为直线阵列、平面阵列和共形阵列等。
阵列天线
直线阵列和平面阵列形式的天线常作为扫描阵列,使其主波
波束最大值方向,则
阵列天线
6. 2. 2 天线阵的分析
1. 均匀线阵的分析
相邻辐射元之间距离相等,所有辐射元的激励幅度相同,
相邻辐射元的激励相位恒定的线阵就是均匀线阵,如图 6.2所示。列天线图 6.2 均匀线阵
阵列天线
1 )均匀线阵方向图
若 n 个辐射元均匀分布在 z 轴上,这时单元的位置坐标
向图函数。当阵列单元相同时, f n (θ , ϕ ) = f ( θ , ϕ ),
对于均匀直线阵有 I n = I 0 ,上式可化为
阵列天线
其中
阵列天线
式(6-62 )为方向图乘积原理,即阵列天线的方向图函
数等于阵列单元方向图函数与阵列因子的乘积。 S (θ , ϕ )
称为阵列因子方向图函数,它和单元数目、间距、激励幅度
单元共轴排列所组成的直线阵,阵列中相邻单元的间距均为
d ,设第 n 个单元的激励电流为 I n ej β n ,通过将每个阵列
单元与一个移相器相连接,使电流相位依次滞后 α ,
阵列天线
将单元 0 的相位作为参考相位,则 βn =nα 。由几何关系可
知,当波束扫描角为 θ 时,各相邻单元因空间波程差所引起
瓣指向空间的任一方向。当考虑到空气动力学以及减小阵列
天线的雷达散射截面等方面的要求时,需要阵列天线与某些
CCD 传感器阵列原理及驱动实验

加在 CCD 移位寄存器 1 和 CCD 移位寄存器 2 的二相时钟脉冲时序不同,前者为 F1、F2,后者 为 F2、F1,从而保证转移到 CCD 移位寄存器 2 的奇数像元的光电荷时序在前,转移到 CCD 移位寄 存器 1 的偶数像元的光电荷时序在后,正好错开,合在一起成为按时序输出的串行视频信号。
F1
F2
6
19
D15
CCD 移位寄存器 2 转移栅 2
...
.... 光电 ....
二极管
...
转移栅 1 CCD 移位寄存器 1
21 SH
22 SS
图 1 -2 TCD1206SUP 的基本结构
图 1-1(a)为一种单排结构,用于低位数 CCD 传感器。它的光敏单元与 CCD 移位寄存器 SR 分开, 用转移栅控制光生信号电荷向移位寄存器转移,一般使信号转移时间远小于摄像时间(光积分时间)。 转移栅关闭时,光敏单元势阱收集光信号电荷, 经过一定的积分时间,形成与空间分布的光强信号 对应的信号电荷图形。积分周期结束时,转移栅打开,各光敏单元收集的信号电荷并行地转移到 CCD 移位寄存器 SR 的响应单元内。转移栅关闭后,光敏单元开始对下一行图像信号进行积分。而已转
有一定的起伏?可以采用什么方法来进行处理?
(5)驱动频率和积分时间对 CCD 输出的影响是什么?
【实验总结】
(1)说明 TCD1206SUP 的基本工作原理。
2
(2)FR 脉冲、SH 脉冲和 F1、F2、M-CEL 脉冲的作用及测量方法,输出信号与 F1、F2 周期的关 系。 (3)说明积分时间的含义,解释驱动频率对积分时间的影响,说明增加积分时间以后,输出信 号的变化及其原因。
高性能声学传感器阵列的设计与调试方法
高性能声学传感器阵列的设计与调试方法声学传感器阵列是一种利用多个声学传感器进行声场采集和信号处理的技术。
它广泛应用于声波成像、声源定位、噪声控制等领域。
本文将介绍高性能声学传感器阵列的设计与调试方法。
一、声学传感器阵列的设计声学传感器阵列的设计需要考虑以下几个方面:传感器选择、布局设计、信号处理算法。
1. 传感器选择在设计声学传感器阵列时,首先需要选择合适的传感器。
传感器的选择应考虑频率响应、灵敏度、动态范围等因素。
常用的声学传感器有麦克风、压电传感器等。
根据应用需求,选择合适的传感器类型和规格。
2. 布局设计声学传感器阵列的布局设计对成像效果和定位精度有重要影响。
传感器之间的距离和布局方式会影响到声波的接收和传播。
一般来说,传感器之间的距离越小,声波成像的分辨率越高,但也会增加计算复杂度。
布局方式可以是线性、矩阵状等,根据具体应用选择合适的布局方式。
3. 信号处理算法声学传感器阵列的信号处理算法是实现声波成像和定位的关键。
常用的信号处理算法有波束形成、自适应滤波、相关分析等。
波束形成是一种通过加权和相位调整来实现主动声波聚焦的方法,可以提高成像的分辨率和对噪声的抑制能力。
自适应滤波是一种通过自适应调整滤波器参数的方法,可以抑制杂散噪声,提高信号的清晰度。
相关分析是一种通过计算不同传感器之间的相关性来实现声源定位的方法,可以提高定位的准确度。
二、声学传感器阵列的调试方法声学传感器阵列的调试是保证其性能和精度的重要环节。
下面介绍几种常用的调试方法。
1. 传感器校准传感器校准是保证声学传感器阵列准确度的关键步骤。
校准过程包括灵敏度校准、相位校准等。
灵敏度校准是通过给传感器输入已知幅度和频率的声波信号,测量传感器的输出响应,从而得到传感器的灵敏度。
相位校准是通过给传感器输入已知相位的声波信号,测量传感器的输出相位,从而得到传感器的相位响应。
2. 传感器阵列校准传感器阵列校准是保证声学传感器阵列成像和定位精度的关键步骤。
天线阵列 讲稿
当 θ m = π / 2 时,上式与侧射阵的主瓣宽度公式相同。 若在正侧向两边 ±φm 内扫描,取 θ m = 90o ± φm 得:
2ϕ 0.5 = 51
λ
L cos φm
(o )
(5.27)
由此式可见,与侧射阵相比,波束最大值发生偏移时半功率波瓣宽度将变宽。
5、副瓣位置和副瓣电平
(1)副瓣位置
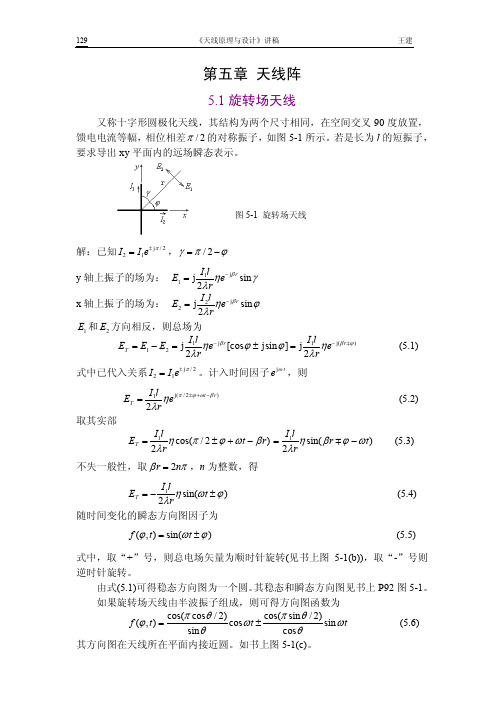
y 轴上振子的场为: E1 = j
I1l η e − jβ r sin γ 2λ r Il x 轴上振子的场为: E2 = j 2 η e − jβ r sin ϕ 2λ r E1 和 E2 方向相反,则总场为 Il Il ET = E1 − E2 = j 1 η e − jβ r [cos ϕ ± jsin ϕ ] = j 1 η e − j(β r ∓ϕ ) 2λ r 2λ r
(5.6)
130
《天线原理与设计》讲稿
王建
思考:如何导出短振子旋转场天线的立体方向图函数? 广播、电视台的发射天线采用的一种蝙蝠翼天线也是一种旋转场天线,见书 上图 5-2。
5.2 均匀直线式天线阵
等间距为 d 的 N 单元直线阵如图 5-2 所示。 在前面第一章中对均匀直线式天 线阵作过简单介绍,得到了 N 元均匀直线阵的阵因子为
SLL = 20 lg | F (ψ s1 ) |= −13.5 (dB)
(5.31)
6、方向性系数 D
由方向性系数公式
D=
π
4π
∫
2π
0
dϕ ∫ F 2 (θ )sin θ dθ
0
π
=
2
∫
π
0
F 2 (θ )sin θ dθ
(5.1)
式中已代入关系 I 2 = I1e ± jπ / 2 。计入时间因子 e jω t ,则
阵列信号处理基础教程
授课教师:廖桂生
西安电子科技大学雷达信号处理实验室
课程目的
掌握空间传播波携带信号的获取与处理的基 本理论和方法,特别是空间多维信号算法,熟悉 参数估计和自适应波束形成的常用算法。
课程要求
期间:含上机实践 期末:论文、考试
西安电子科技大学雷达信号处理实验室
参考文献
1. Prabhakar S.naidu,Sensor Array Signal Processing 2. 王永良.空间谱估计理论与算法,清华大学出版社 3. Monzingo.R.and Miller T. Introduction to adaptive array.
西安电子科技大学雷达信号处理实验室
代入波动方程:k
2 x
s(r
,
t
)
若约束条件:
k
2 x
k
2 y
k
2 y
s(r,
t
)
kz2s(r
,
t
)
kz2
2
c2
2
c2
s(r,t)
即
kk
k
2 x
k
2 y
kz2
c
则:(*)式表示的信号是波动方程的解,称为“单色”
或“单频”解。
c
为传播速度,2
频率 f 之外无其它频率分量,那么该信号由其整个
持续期内的时间间隔为1/ 2 f 的信号采样值完全确
定,从而使模拟信号可以由无限个离散的点信号来 表示(拟合)。
空间采样:与时间采样类似,采样频率必须足够高才 不会引起空间模糊(即空间混叠),但由于受到实 际条件的限制,空间采样的点数不可能无限,这相 当于时域加窗,所以会出现旁瓣泄漏。
传感器阵列波束优化设计及应用
传感器阵列波束优化设计及应用传感器阵列波束优化设计及应用是一种利用多个传感器构成的阵列来实现波束形成和优化的技术。
传感器阵列波束优化设计广泛应用于雷达、通信、声纳等领域,它能够提高信号接收的灵敏度和方向性,提高信号的质量和解析度,同时减小背景噪声的干扰。
传感器阵列波束优化的基本原理是利用阵列中的单个传感器同时接收到的信号之间的时延差异来实现波束的形成。
传感器阵列通常由多个传感器组成,这些传感器被布置在一定的几何形状中,如线性、矩形、圆形等。
每个传感器都能够接收到目标信号并将其转换成电信号。
通过对不同传感器接收到的信号进行时延和幅度的加权叠加,就能够实现一个波束,俗称主瓣。
传感器阵列波束优化的设计过程主要包括以下几个步骤:1. 传感器阵列布置:根据具体的应用需求和场景,选择适当的传感器数量和布置方式。
常用的阵列形状有线性、矩形和圆形等。
布置传感器时需要考虑信号的方向性、覆盖范围和分辨率等因素。
2. 信号采集和处理:每个传感器接收到的信号经过放大和滤波等处理后,通过模数转换器转换成数字信号,然后再进行波束形成和优化的算法处理。
3. 波束形成算法:根据阵列中的传感器位置和信号到达时间差,采用合适的波束形成算法来实现波束的形成。
常用的波束形成算法有传统的波束形成算法、自适应波束形成算法以及基于压缩感知的波束形成算法等。
4. 波束优化算法:在波束形成的基础上,根据实际需求,通过优化算法进一步提高波束的指向性和抗干扰性。
常用的波束优化算法有传统的无失真波束权重优化算法、最小方差无失真波束权重算法以及基于飞行网络的波束优化算法等。
传感器阵列波束优化设计及应用在各个领域都有广泛的应用。
在雷达领域,传感器阵列波束优化可以提高雷达的目标探测和跟踪能力,提高雷达的抗干扰能力,同时还可以减小雷达的射频输出功率,降低对环境的影响。
在通信领域,传感器阵列波束优化可以提高无线通信系统的接收信号质量,提高信号的覆盖范围和传输速率。