一种自适应阈值的运动目标提取算法
改进型ViBe算法及其在运动目标提取中的应用
改进型ViBe算法及其在运动目标提取中的应用杨青;张著洪【摘要】提出一种基于阈值半径自适应更新及阴影与鬼影检测的改进型ViBe算法,解决运动场景下ViBe算法的目标提取效果易受背景高频扰动、摄像机抖动、阴影、鬼影的影响问题.算法设计中,依据当前帧的像素点梯度与背景图序列对应像素点的灰度均方差设计阈值自适应更新策略;依据背景图在HSV空间中的像素值设计阴影去除规则;利用前景-邻域直方图的相似度匹配规则设计鬼影清除规则.实验结果表明,改进型ViBe算法在保留原有的高效性的同时,能够较好地消除视频图像中隐含的阴影和鬼影,以及抖动对目标提取的影响.【期刊名称】《贵州大学学报(自然科学版)》【年(卷),期】2019(036)002【总页数】5页(P74-78)【关键词】ViBe算法;鬼影检测;阴影消除;阈值半径自适应更新【作者】杨青;张著洪【作者单位】贵州大学大数据与信息工程学院,贵州贵阳550025;贵州大学大数据与信息工程学院,贵州贵阳550025【正文语种】中文【中图分类】TP391运动目标检测与跟踪是动态场景下运动目标行为分析的关键问题,也是视频分析的重要环节,对有效提取运动目标和正确分析目标的运动行为具有重要的现实意义。
已有的背景建模法种类繁多,如帧间差分法[1]、基于关键点的建模法[2]、光流法[3]、混合高斯算法[4]、ViBe算法[5]等。
ViBe算法是一种被较为广泛采纳的背景建模方法,由于其不考虑目标运动速度对目标提取效果的影响,因此相较于帧间差分法和基于关键点的建模法,获得的噪声模型更能恰当反映实时场景的背景状况;与此同时,相较于光流法和混合高斯算法,ViBe算法的设计思想简单、计算量小,能满足实时目标检测的要求。
可是,该方法的随机更新策略也导致目标提取的效果受到鬼影、阴影、背景高频扰动和摄像机抖动的影响。
鬼影是因视频初始帧存在运动目标而产生,其对后续目标的检测会造成较大影响;已有研究成果中[6-8],胡小冉[6]利用视频帧前n帧构建初始背景,进而此背景进行背景建模。
视频图像序列中运动目标区域检测算法研究
结 果 表 明 所 提 出 的算 法 具 有 较 理 想 的 效 果 。 关键词 视频 图像 ;背 景 差分 ; 景 更 新 ;自适 应 阈值 背
TP 9 31 中图 tcin i d oI g e u n e sa c f Mo ig0b t e AraDee t Vie ma eS q e c o n
总 第 2 4期 7
21 0 2年 第 8期
计算机 与数字工程
C mp tr& Dii lE gn eig o ue gt n iern a
Vo. 0 No 8 14 .
1 07
视 频 图像 序 列 中运 动 目标 区域 检 测 算 法研 究
杜岳涛 张 学 智
西安 703) 1 0 2 ( 安 工 业 大 学 电 子 信 息 工程 学 院 西
1 引言
视 觉 是 人类 从 大 自然 中获 取 信 息 的最 主 要 的手 段 。据
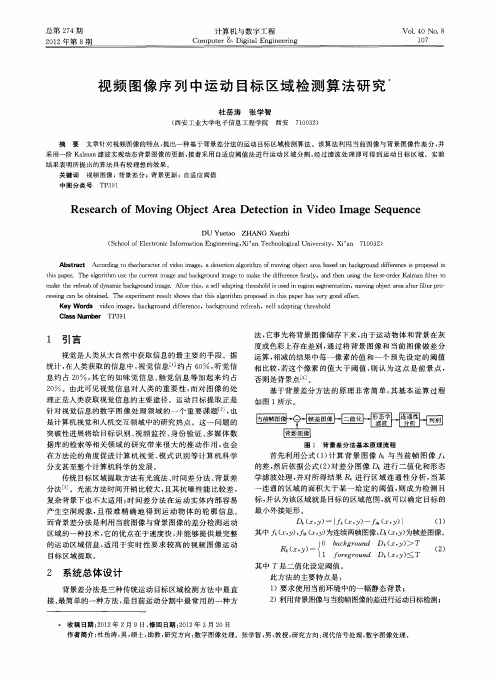
法, 它事先将 背景图像储存下来 , 由于运动物体和 背景在灰 度或色彩上存在差别 , 通过 将背景 图像 和 当前 图像做 差分 运 算 , 减 的 结 果 中 每 一 像 素 的 值 和 一 个 预 先 设 定 的 阈 值 相
据库 的检索等相关领域 的研究 带来很 大 的推动作 用 , 也会
在 方 法 论 的角 度 促 进 计 算 机 视 觉 、 式 识 别 等 计 算 机 科 学 模 分 支 甚 至 整 个 计 算 机 科 学 的发 展 。 传 统 目标 区 域 提 取 方 法 有 光 流 法 、 间 差 分 法 、 景 差 时 背 分 法 [ 。光 流 方 法 时 间 开 销 比较 大 , 其 抗 噪 性 能 比较 差 , 3 ] 且 复杂 背 景 下 也 不 太 适 用 ; 间 差 分 法 在 运 动 实 体 内部 容 易 时
一种基于自适应阈值的SUSAN角点提取方法
中图分类号:T 9 1 3 N 1. 7 文献标识码 :A 文章编号;10 —8 1 060 —3 1 3 0 1 9( 0)60 3— 8 2 0
A US S AN r e t c o s d o a tv r s o d Co n rDe e t rBa e nAd p i eTh e h l
维普资讯
第2 卷 第6 8 期 20 0 6年 6月
红 外 技 术
I fae e h oo y n rrdT c n lg
V 1 8 No 6 02 l. . J n 2 0 ue 06
一
种 基于 自适应 阈值 的 S S N 角点提取方法 UA
i g r c s iga dme s rme tAni r v dwa f eemiig tetrs odo US ma ep o esn n a ue n . mp o e yo tr nn eh l fS AN p rtr s d h h o eao wa p o o e . h eh l wa ac ltdi v r igeS AN mpae wh c k o sbet iku e r p sd T r s odt sc luae e eysn l US n t e lt, ihma ei p sil pc pt t o h i h o r n al id fga o tat T e e p r n e ut a e n t s rg tc m esi l kn so ry c nr s. h x e me trs l b s d o i meh d wa r v d t e i h t o sp o e o b fa il. e sbe Ke wo d : S y rs US AN p r tr c m e ee t n s l a t e i r t es g n o eao ; o rd tci ; ef d p i ; t ai e me t o a v e v
基于DWT的自适应在线聚类运动目标提取方法
收 稿 日期 :2 1 一 1 1 0 2 O . 3;修 回 日 期 :2 1 . 2 2 02 0 — 5
( 1 K o 8) 1J 1o
的研究 , 出了许 多行之有效 的方 法。这些方法 主要 可分 为两 提 大类 :) a 建立背景模 型 并 采用 自适应 方法对 模 型参数 进行 调整 , 从而 获得 新 的背景 图像 , 括非 参数 模型 法 、 包 混合 高
基 金 项 目 : 国 家 自 然 科 学 基 金 资 助 项 目 ( 1 00 5 ; 西 省 教 育 厅 专 项 科 研 计 划 6 12 9 ) 陕
Abs r t Ba e n t e h poh sst a h c r un ie n e st p a si ma e s q n e wih m a i m o a iiy, tac : s d o h y te i h tt e ba kg o d px lit n i a pe r n i g e ue c t x mu pr b blt y
aot b u ,m u —a g t o ig. hitr esm vn
K yw r s WT dsrt w v l a s r ; i l c s r g a k ru d rcn t c o ; o igt g t et c n e o d :D ( i e aee t n f m) px s l t i ;b c go n e o s u t n m vn e xr t g c e tr o e u e n r i r a s ai
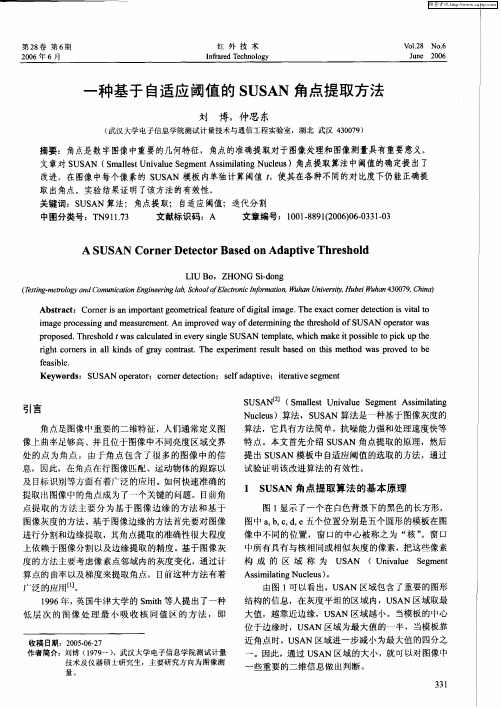
灰 度值 (,) 的 直 方 图 11点 灰 度 值 ( 16 ) 的 直 方 图 7,8点
自适应背景更新及运动目标检测算法

A b s t r a c t : D e t e c t i n g m o v i n g o b j e c t s f r o m v i d e o i s a k e y t e c h n i q u e i n i n t e l l i g e n t v i d e o s u r v e i l l a n c e a p p l i c a - t i o n s . T h i s p a p e r p r o p o s e s a n a d a p t i v e r e g i o n — b a s e d b a c k g r o u n d u p d a t e a n d mo v i n g o b j e c t d e t e c t i o n a l g o —
结果表 明 , 该算 法能够 自适应地对 背景模 型进行 更新, 对 于背景的扰动 、 光线的渐变等 带来的影响有很好 的抑制作
用, 可 以有 效 地 检 测 出运 动 目标 。
关键词 : 视频监控 ; 运 动 目标 检 测 ; 自适应 背景 更新 ; 自适 应 闲值 选 取
中图分类号 : T N 9 1 9 . 8
p h o l o g y i f l t e i r n g a n d a r e a d e t e c t i o n o f c o n n e c t e d r e g i o n s . T h e mo v i n g o b j e c t s a r e F i n a l l y d e t e c t e d a n d t h e
LU Gu a n - mi n g, XI E S h u a n g
( C o l l e g e o f T d e c o mm u n i c a t i o n& I n f o r ma t i o n E n g i n e e r i n g , na nj i n g U n i v e r s i t y o f P o s t s a n d T e l e c o m mu n i c a t i 0 n s , N a n j i n g 2 1 0 0 0 3 , C h i n a )
回波检测算法
回波检测算法
以下是几种常见的回波检测算法:
- 恒虚警检测器(CFAR):是一种广泛使用的自适应阈值检测算法,能够在不同的背景噪声下保持虚警率恒定。
常见的CFAR算法有:CA-CFAR(单元平均CFAR)、GO-CFAR(最大值保护CFAR)、SO-CFAR(序列排序CFAR)等。
- 能量检测法:该方法基于目标信号在时间或频率域具有较高能量的特点。
通过计算接收信号的能量并将其与预定阈值进行比较,以检测目标是否存在。
- 高阶统计量检测:这类方法利用高阶统计特性(如偏度、峰度等)来检测目标,因为目标信号和背景噪声的高阶统计特性通常有明显差异。
- 基于模型的检测:这种方法通过对信号进行建模来区分目标信号和背景噪声。
例如,在径向速度上应用多普勒滤波器可以检测出运动目标。
- 联合检测与估计(JDE):JDE方法将目标检测与参数估计相结合,可以在检测到目标的同时估计其参数,如速度、距离等。
- 空时自适应处理(STAP):STAP是一种在空域和时域上同时进行自适应滤波的方法,能够有效抑制杂波和干扰,提高目标检测性能。
- 机器学习和深度学习方法:近年来,基于机器学习和深度学习的方法在雷达目标检测领域取得了显著的进展。
例如,支持向量机(SVM)、随机森林(RF)、神经网络(NN)和卷积神经网络(CNN)等算法已成功应用于雷达信号处理。
这些算法可以单独使用,也可以结合使用以提高检测性能。
实际应用中,需要根据具体的雷达系统、场景和目标特性来选择合适的目标检测算法。
视频序列中运动人体的实时检测与提取
摘要 :文章基于 多高斯背景更新模型 ,提 出了一种基 于背
景 减除 的时间差 分运动 目标检 测方 法 ,提 高 了运 动 目标提 取 的精确性 。 同时 ,用一 种 自适应 阈值 模 型进 行前 景提取 。提
三 、运动 目标的检 测与提 取
( )基于背景减除的时间差分法 一
本文提 出了一种采用 了背景减除法和时 间差分法加权平均
界提取 ,然后使用种子填充算法来 实现 对运 动 目 区域 的填充 标
得到一个完整封闭的区域。
( ) 自适 应 阈值 二
在不存在噪声 的理想情况下 ,差分 图像 中不为零 的区域表 示运动区域 ,然后鱿鱼外界 噪声的存在 ,差分图像不可能为令 。
二 、高斯 背景 更新模 型
在本文算法 中使用一种基于高斯统计模型1 2 1 的背景图像估计 需要设定阈值T 以消除噪声 的影响。阈值 的选取直接决定着检测 算法 ,其 中背景 图像 的估计 由初始 化和更新 两部分组成 。在背 结果 的好坏 ,只有恰 当的阈值才 能正确 的分 割出运 动 目标所 占 景图像 的初始化算法 中,求取一段较长的时问段( ) M 视频序列 图 的区域 。这里我们使用一 种基于高 斯模型 的 自适应 阈值方法 。 像 中每一像素 的平均亮度 ,并 计算 在该 段时间内的每一像素亮 此方法是一种基 于直方 图物体分割 的方法 ,我们假设 差分得 到 度的方差作 为初始 的背景借 汁图像 , ̄B =/ ,- 1 P o [ o0 ,式中 t 2 的灰度 图像 直方 图是 由三个 附加高斯 噪声相 加而得到。差 分值
‘
I M-  ̄ I sL
( 缶肥 )
( = ∑[( 一 0 ,】 ) , )/( , 2 )
视频序列中运动目标检测算法
1 引言
视频序列 中运 动 目标的检测 是计算机视觉研 究的重点与
难点 , 传统检测方法包括光流法n 帧间差分法 1 、 l 和背景差分法 。
适 应 阈值 。
H U X i ohu . UA N Sha D e e ton l ort m o o ng a g t n i o e a iG n. t c i a g ih f m vi t r e i v de s que e . o pu e Eng ne rng nd nc sC m tr i e i a Appfc - i a
摘 要 : 出一种 结合 区域级和像 素级背景差分 法的 目标检 测算法 , 提 可以有 效解决视频序列 中噪 声分 布不均问题 。利用一种基 于熵能的局部 自适应 阈值 划分 出前景和 背景 , 在此基础 上对前景和背景邻接 区域像素点进行检 测 , 并提 出一种 自适应光线 变化 的背景 更新 算法。实验 结果表明 , 算法比传统单 闽值 背景差分法抗噪 能力更强, 测 目标轮 廓更加完整, 该 检 能够准确检 测出运动
兰州交通大学 电子 与信息科学学 院 , 兰州 7 0 7 300
Sc oo e to c n I o m a i Eng n e i g, nz ou i o o nie st La hou 3 70, na h l of Elc r ni a d nf r ton i e rn La h Ja t ng U v r iy, nz 7 00 Chi
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
万方数据万方数据・2382・计算机应用研究第27卷称为(F,B)的最大类间方根一算术均值距离(maxclusters’squarerootarithmeticmeandivegence,MCSAM)。
2.2算法步骤自适应阈值的运动目标提取算法的具体步骤如下:a)初始化:Threshold=Ave,No=0,N1=0,Gmyo=0,Gray。
=0,MCSAM(F,B)=0,Times=0(表示迭代次数)。
b)如果Times<T(T为阈值调整次数,即最大迭代次数),Times++;否则,转步骤f)。
c)遍历图像,由上述定义分别计算Ⅳo,N。
,Grayo,Gray。
d)计算Aveo,AveI,∞o,∞1,Ave,CSAM(Fi,B1)。
e)如果MCSAM(F,B)<CSAM(f,曰;),则令MCSAM(F,B)=CSAM(Fi,B;),Threshold=Threshold+Step(Step表示阈值调整步长),转步骤b);否则,不变,Threshold=Threshold—Step,转步骤b)。
f)此时的MCSAM(,,鳓就是所要寻找的最佳阈值,算法结束。
将运动目标和背景作为两个聚类,把聚类问的方根一算术均值距离最大作为阈值选择的准则是本算法的核心。
背景和运动目标之间的CSAM越大,说明构成图像的两部分差别越大,当部分目标错分为背景或者部分背景错分为目标时,都会导致两部分差别变小,使得CSAM值变小。
因此,MCSAM意味着错分的概率最小,该方法能保证运动目标提取的准确性。
2.3阈值更新策略本文的算法主要采用两种方法进行阈值更新。
第一种是定时更新,即在规定时间段中(通常3—5min),抽取10张连续图像序列利用该算法计算下一时间段差分图像的分割阈值。
这种方式适用于背景缓慢变化的情况,如一天当中太阳光照的缓慢变化。
第二种方法¨21是实时更新,若在当前帧图像与背景模型差分后所得差分图像中,∞。
大于某一个阈值(通常取80%),则认为整个背景发生了变化;若连续多帧图像中这一比值依然很大,则不仅更新背景模型,同时更新阈值Thresh—old。
这种方式适用于背景发生突变时的情况,如室内突然开灯或关灯。
此外,如果图像中某些固定区域(非整幅图像)在较长时间内一直保持变化状态,有两种情况:一种是该区域像素灰度均值平稳变化,则认为该处背景的实际状态发生了变化(如户外汽车的停泊和驶走),此时执行分割阈值更新操作;另一种情况是该区域像素灰度均值变化不平稳,则该处背景可能存在显示器屏幕一类的物品,此时标记该区域,只检测该区域以外的图像,进行阈值更新。
3实验结果利用本文的算法对大量实际视频图像序列进行了运动目标提取的实验,并且在实验中总结了阈值调整次数Tin螂和阈值调整步长Step的最优选择方法。
3.1阈值调整次数和阈值调整步长的确定阈值调整次数和阈值调整步长为本算法中可调整的参数。
对视频中图像序列计算分割阈值时,可通过改变阈值调整步长Step和阈值调整次数Tim鹤的值,比较每帧图像的分割阈值。
由实验统计数据可知:分割阈值准确度与阈值调整步长成反比,与阈值调整次数成正比,即阈值调整步长Step越小,阈值调整次数Times越大,得到的分割阈值准确度越高,但同时也带来了巨大的计算量。
因此,本文采用如下办法解决此问题:首先固定Times值,选择阈值变化减缓时的最小Step值;然后固定Step,寻找阈值变化减缓时的最小Times值;将选定的Step作为阈值调整步长,Times作为阈值调整次数。
3.2运动目标提取实验利用本文算法对不同情况下的多组视频序列进行了运动目标提取实验,视频包括室内、室外、开关照明等场景,并将运动目标区域提取结果与基于背景差法的运动目标提取结果进行了比较。
其中,后处理采用数学形态学的开运算。
实验1图3为摄像头获取的室内场景关灯条件下的视频序列,其中,(a1)(a2)(a3)分别是该图像序列中第50、110和150帧图像;图3(c)为利用本文算法分别对图1(a)中图像进行运动目标提取的结果,运动目标完整,且干扰噪声点较少;图3(b)是利用普通背景差法进行运动目标提取的结果,可以看到除由于未进行阴影消除出现伪影外,效果与图3(c)相差不多。
(c)基于自适应闻值运动目标提取算法的提取结果图3室内人侧面走过摄像头视频(关灯情况下)实验2图4为摄像头获取的室内场景突然开灯情况下的视频序列。
其中,(a1)(a2)(a3)分别是该图像序列中第250、310和350帧图像;图4(b)是利用背景差法进行运动目标提取的结果,可以看到,提取效果较差,这是由于照明环境的突然变化,使背景模型发生改变,而运动目标提取阈值固定不变所导致的结果;图4(C)是利用本文算法对运动区域提取阈值进行了自动调整,使得分割更灵活可行,因此,提取结果依然是运动目标完整,且干扰噪声点较少,从而验证了本算法对环境亮度突变的鲁棒性。
实验3图5为摄像头获取的室外场景视频序列,室外场景中通常存在一些微小的变化区域,如树叶的轻微摆动。
由于本文算法后处理采用了数学形态学方法,可以有效去除这些微小变化引起的误检。
但是,当背景中变动区域的运动幅度非常大,如狂风中摇摆的树木等,则该处理方法便无法完全去除变动区域的影响。
执行时间也是本算法的一个重要检测指标,本文使用1.8GHzIntelPentium@DCPU,512MB内存的普通Pc机,图像分万方数据第6期孙明玉,等:一种自适应闽值的运动目标提取算法・2383・辨率320x240pixels,所有实验的运动目标提取速度均大于25f西,满足实时处理要求。
4结束语图5室外场景视频随着机器视觉系统的应用越来越广泛,运动目标的枪测与提取问题成为研究热点。
本文提出了一种白适应阈值的运动目标提取算法,该算法按照像素灰度值将图像划分为运动目标和背景区域两个聚类,利用聚类间的方根一算术均值最大作为选择分割阈值的准则,采用定时和实时两种阈值更新策略,从而实现了运动目标的准确完整提取,为进一步的目标识别或跟踪提供了有力保障。
参考文献:[1]SMITHSM,BRADYJM.ASSET-2:real-timemotionsegmentationandshapetracking[J].IEEETransonPAMI,1995,17(8):814-820.【2]MEIERT,NGANKN.Automaticsegmentationofmovingobjectsforvideoobjectplanegeneration[J].IEEETransollCircuitsandSystemsforVideoTechnology,1998,8(5):525・538.[3]卓志敏,杨雷,杨萃元,等.一种复杂环境下的红外成像运动目标检测方法[J].宇航学报。
2008,29(1):339-343.[4]明英,蒋晶钰.基于Cauchy分布的红外视频运动目标检测[J].缸外与毫米波学报,2008,27(1):65-71.[5]STAUFFERc,GRIMSONWEL.Adaptivebackgroundmixturemodelsforreal—timetracking[C]//ProcoftheIEEEComputerSocie—tyConferenceonComputerVisionandPatternRecognition.1999:246—252.[6]BASHARATA,GRITAIA,SHAHM.Learningobjectmotionpat・ternsforanomalydetectionandimprovedobject[C]//ProcofCVPR.2008:lt8.[7]KORNPROBSTP,DERICHER,AUBERTG.Imagesequencearia・lysisviapartialdifferenceequations[J].JournalofMathematicalImagingandVision,1999,”(1):5—26.[8]张文涛,李晓峰,李在铭.高速密集视频目标场景下的运动分析[J].电子学报,2000,28(10):114-117.[9]岑峰,威飞虎,陈茂林.长期视频监控系统的多分布模型背景差方法[J].红外与毫米波学报,2002,21(1):59—63.[10]侯志强,韩崇昭.基于像素灰度归类的背景重构算法[J].软件学报,2005,16(9):1568-1576.[1i]MrlTALA,PARAGIOSN.Motion—basedbackgroundsubtractionusingadaptivekerneldensityestimation[C]//Procofthe2004IEEEComputerSocietyConferenceonComputerVisionandPatternReeog-nition.2004:302—309.[12]HARITAOGLUI,HARWOODD,DAVISL.W4:real—timesurveil—lanceofpeopleandtheiractivities[J].IEEETransonPAMI,2000,22(8):809—830.(上接第2379页)参考文献:[1]GONZALEARC,WOODSRE.Digtalimageprocessing[M].NewYork:AcademicPress,2000.[2]何坤,周激流.基于局部保边函数的低信噪比图像去噪[J].四川大学学报:工程科学版,2009,41(2):179-184.[3]HWANGH,HADADADRA.Adaptivemedianfiltersnewalgo-rithmsandresults[J].IEEETransonImageProcessing,1995,4(4):499—502.[4]ZHANGShu-qun,KARINMA.Ahi.Stimpulsedetectorforswitchingmedianfilter[J].IEEESignalProcessingLetters,2002。
9(11):360,363.[5]张旭明,徐滨士.去除脉冲噪声的自适应开关中值滤波[j].光电工程。
2006,33(6):78・83.[6]CHENTao。
WUHang—ren.Adaptiveimpulsedetectionusingcenter.weishtedmedianfilters[J].IEEESignalProcessingLetters,2001,8(1):1-3.[7]RAFAELCG,RICHARDEW.数字图像处理[M].2版.北京:电子工业出版社,2007.[8]陈守水,杨新.一种基于两阶段的脉冲噪声滤除算法[J].信号处理,2008,24(4):627・630.[9]CHENHC,WANGWen-jun.Efficientimpulsenoisereductionvialocaldirectionalgradientsandfuzzylogic[J].FuzzySetsandSys-toms,2009,160(13):1841・1857.[10]VILLEDvande.NACHTEGAELM.Noisereductionbyfuzzyimagefiltering[J].IEEETransonFuzzySystem,2003,11(4):429.436.[11]SCHULTES,NACHTEQAEI。