CAN标定协议(基于ccp标准)
基于CCP协议的新能源汽车控制器标定系统研究
基于CCP协议的新能源汽车控制器标定系统研究摘要:随着新能源汽车的快速发展和普及,其核心部件之一——控制器的标定技术也越来越受到重视。
本文以基于CAN通信协议的新能源汽车为研究对象,针对其控制器标定问题,提出了一种基于CCP协议的控制器标定系统。
首先介绍了新能源汽车及其控制器的基本概念和相关技术,然后详细论述了CCP协议的原理、特点及其在新能源汽车控制器标定中的应用,接着阐述了新能源汽车控制器标定过程中的需求与挑战,并提出了相应解决方案。
最后,通过实验验证,证明该系统具有良好的控制精度和稳定性,同时也具备良好的实用性和拓展性。
关键词:新能源汽车,控制器,标定系统,CCP协议,控制精度一、引言新能源汽车作为21世纪的重要产业之一,受到了各国政府和企业的广泛关注。
其高效、清洁、环保的特点,符合可持续发展的要求,为人类社会的可持续发展做出了重要贡献。
其中,控制器作为新能源汽车的核心部件之一,其性能和可靠性对整个车辆的运行和使用安全至关重要。
控制器标定是保证控制器性能和可靠性的重要手段之一。
传统的控制器标定技术多采用人工调整方式,效率低、精度不高、周期长,难以适应新能源汽车控制器的快速发展和变化。
因此,研究基于CCP协议的新能源汽车控制器标定系统,成为当前亟待解决的问题之一。
二、新能源汽车及其控制器新能源汽车是指采用新能源(包括太阳能、风能、水能等)作为动力来源,以锂电池、超级电容、燃料电池等作为能量储存装置,运用电动机驱动车轮转动,实现汽车行驶的一种新型汽车。
控制器是新能源汽车的核心部件之一,主要功能是通过控制电机的转速和转矩,实现车辆的加速、制动和驱动等功能。
三、CCP协议原理及其应用CCP(CAN Calibration Protocol)协议是一种基于CAN通信协议的标定协议,主要用于控制器的标定和诊断。
其工作原理是通过CAN总线实现控制器与外部标定工具之间的通信,使标定工具能够读取和设置控制器内部的参数和调节值,从而实现控制器的标定。
基于CCP协议的电动汽车AMT标定方法

基于CCP协议的电动汽车AMT标定方法【摘要】本文基于在线标定协议CCP(Can Calibration Protocol)设计并开发了应用于电动汽车自动变速器(AMT)控制单元(TCU)的整车控制在线标定系统。
通过该方法实时在线的快速标定整车控制参数、换档规律,以达到快速优化换挡品质、提升电动车整车动力性、经济性指标的目的。
【关键词】CCP协议;电动车;AMT;标定1引言电动汽车因具有低污染、低噪声、能量效率高、能量来源多样化的特点,使得开发以电动汽车为代表的各种新能源汽车,成为解决汽车带来的诸多问题的有效途径[1]。
自动变速技术在纯电动车辆中的引入,能够大幅提升汽车的动力性能,有效的增大系统的能源利用效率,从而提高对于纯电动汽车最为重要的续航能力。
作为电动汽车驱动技术的关键环节,自动变速系统控制器(TCU)控制参数的在线标定对整车性能将产生至关重要的影响[2]。
因此,开发符合纯电动车自动变速系统的标定系统,通过方便快捷的标定技术提升电动汽车的各项性能,对于电动车实现产业化发展具有重要的现实意义。
本文以纯电动汽车为基础车型,以AMT自动变速系统为研究对象,通过开发的基于CCP协议的在线标定系统,对其TCU控制参数、换挡规律等进行在线标定,并在整车道路试验中进行了验证。
2 CCP协议及工作原理2.1 CCP通信方式基于CCP协议的ECU标定采用主-从通信方式。
主设备通过CAN总线与从设备相连,其中主设备是测量标定系统,从设备是需要标定的ECU。
根据CCP 协议,主设备首先与从设备建立逻辑链接,然后通过主设备向从设备发送命令来起始两者间的数据通信。
2.2 CCP报文帧结构基于CCP协议的标定只占用两帧CAN报文,分别是命令接收对象CRO和数据传输对象DTO。
CRO由主设备发给从设备,DTO是从设备反馈的报文。
两者分别通过一个自己的ID标识符进行标识。
CRO与DTO的ID标识符由通信协议自行定义,CCP协议只对CRO及DTO的数据场做了详细定义。
CCP标定协议的几点总结

1、 CCP协议概述CCP(CAN Calibration Protocol)是一种基于CAN总线的匹配标定协议。
ECU都需要经过匹配标定的过程,从而确定其运行参数和控制参数。
有时为了实现对ECU的精确控制以及参数匹配修改,满足预定的要求,必须对ECU进行精确的匹配标定以及优化各项控制参数。
基于此,ASAM自动化测试系统标准协会(Association for Standardization of Automation and Measuring Systems)制定了CCP协议。
更形象地说,CCP协议实现了ECU在运行过程中,内部变量的在线监测以及有需要时对某些变量的在线修改。
监测ECU的内部变量可以测试ECU运行的正确性,若发现某个变量的值不是我们期望的,我们可以标定它,修改成期望的值。
举例来说,我们要监测ECU中发动机的转速,若发现发动机转速是错误的,不是我们所需要的,我们立即就可以修改它成正确的我们需要的转速。
2、 CCP通信上面我们对CCP有了个总体的印象,对CCP能够做什么有了了解,下面我们关键的是要怎么实现它。
基于CCP协议的ECU标定采用主-从通信方式,主设备通过CAN总线与多个从设备相连。
其中主设备是测量标定系统MCS(Measurement Calibration System),从设备是需要标定的ECU。
在这里测量标定系统我介绍一下CANape。
CANape是一款ECU标定和测试工具。
与CCP协议相结合,能完成对ECU标定,同时还能在ECU运行期间直接访问内存并进行操作。
从上面的介绍,现在我们心中应该至少有这么一个框图(如下),通过CAN总线,CANape可以读出ECU中的变量,同时CANape也能写ECU中的变量。
3、 CCP协议报文帧格式CCP属于CAN总线的应用层协议,它占用CAN报文两个ID标志符,即CRO(Command Receive Object)和DTO(Data Transmission Object),使用数据帧中数据场的8个字节。
ccp协议代码

ccp协议代码竭诚为您提供优质文档/双击可除ccp协议代码篇一:基于ccp协议的汽车标定系统daq模式的实现基于ccp协议的汽车标定系统daq模式的实现20xx-12-2623:56:00来源:中国自动化网ccp协议是一种基于can总线的匹配标定协议。
该协议具有通信可靠、传输速度快、通用性好等特点。
本文讨论了一种基于ccp协议的汽车ecu标定系统,并详细介绍了该系统的工作原理、数据采集机制以及实现方式。
前言随着汽车电子技术的发展,电子控制单元(ecu)的标定已成为汽车电子控制装置开发的一个重要环节。
大多数ecu都需要经过匹配标定的过程,从而确定其运行参数和控制参数。
目前国内还没有成熟的基于ccp的ecu标定系统,已有的一些系统主要是采用Vector提供的freeccpdriver,或者基于matlab的相关工具包,在此基础上作自己的应用软件,并没有独立的ccp驱动;国外的产品功能强大,但价格昂贵。
因此,研究、掌握ccp的核心技术,开发针对不同用户需求提供不同的定制功能,并能适应pci、usb等不同主机接口的ecu标定软件就具有非常重要的意义。
ccp协议简介ccp协议的通信方式基于ccp协议的ecu标定采用主-从通信方式,主设备通过can总线与多个从设备相连,如图1所示。
其中主设备测量标定系统mcs(measurementcalibrationsystem),从设备是需要标定的ecu。
根据ccp协议,主设备首先与其中一个从设备建立逻辑连接。
建立逻辑连接后,主、从机之间所有的数据传递均由主机控制,从机执行主机命令后返回包含命令响应值或错误代码等信息的报文。
任何一个从机都可以定时地根据由主机通过控制命令所设置的列表来传递内部的数据。
所以说数据的传递是由主机初始化,由从机来执行,并且是由固定的循环采样频率或事件触发的。
图1ccp通信结构图ccp协议定义了两种工作模式:一种是polling(查询)模式,另一种是daq(数据采集)模式。
CAN标定协议(基于ccp标准)
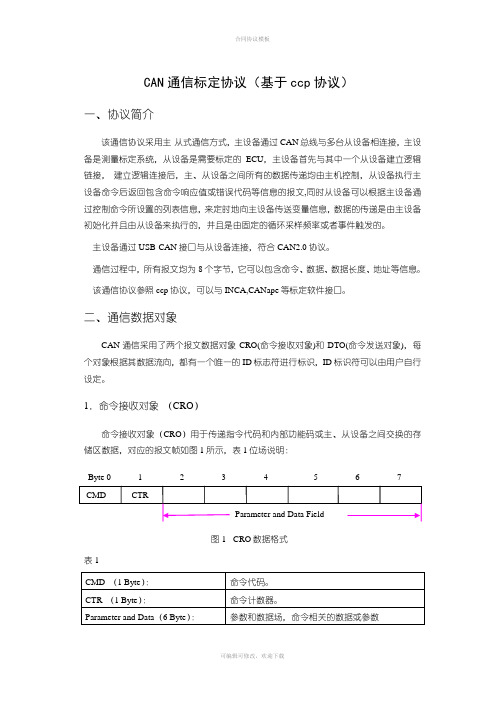
CAN通信标定协议(基于ccp协议)一、协议简介该通信协议采用主-从式通信方式,主设备通过CAN总线与多台从设备相连接,主设备是测量标定系统,从设备是需要标定的ECU,主设备首先与其中一个从设备建立逻辑链接,建立逻辑连接后,主、从设备之间所有的数据传递均由主机控制,从设备执行主设备命令后返回包含命令响应值或错误代码等信息的报文,同时从设备可以根据主设备通过控制命令所设置的列表信息,来定时地向主设备传送变量信息,数据的传递是由主设备初始化并且由从设备来执行的,并且是由固定的循环采样频率或者事件触发的。
主设备通过USB-CAN接口与从设备连接,符合CAN2.0协议。
通信过程中,所有报文均为8个字节,它可以包含命令、数据、数据长度、地址等信息。
该通信协议参照ccp协议,可以与INCA,CANape等标定软件接口。
二、通信数据对象CAN通信采用了两个报文数据对象CRO(命令接收对象)和DTO(命令发送对象),每个对象根据其数据流向,都有一个唯一的ID标志符进行标识,ID标识符可以由用户自行设定。
1.命令接收对象(CRO)命令接收对象(CRO)用于传递指令代码和内部功能码或主、从设备之间交换的存储区数据,对应的报文帧如图1所示,表1位场说明:图1 CRO数据格式表12.数据传输对象(DTO)数据传输对象(DTO)指由从设备反馈的报文。
DTO根据报文首字节PID的值可以由三种形式,见表2:表2:(1). CRM和Event Message的报文帧如图2所示:图2 CRM-Event Message报文帧格式表3:场说明(2). DAQ-DTO(Data Acquisition-DTO)的报文帧:3. 协议命令列表及说明(标注绿色字体部分逐步补充完整)3.3命令详细说明3.3.1 CONNECT命令:命令接收对象(CRO):3.3.2 SET_MTA命令:命令接收对象(CRO):3.3.3 DNLOAD命令:数据传送对象(DTO):3.3.4 UPLOAD命令:数据传送对象(DTO):3.3.6 DISCONNECT命令:数据传送对象(DTO):3.3.8 SET_DAQ_PTR命令:数据传送对象(DTO):3.3.9 WTITE_DAQ命令:3.3.10 START-STOP命令:数据传送对象(DTO):3.3.11 CLEAR_MEMORY命令:3.3.12 PROGRAM命令:命令接收对象(CRO):数据传送对象(DTO):4、标定实现(举例)建立完善的匹配标定具体流程为:与底层ECU进行连接,监控、在线标定,上载和下载map图,断开连接等操作。
基于CCP协议的汽车ABS标定系统CAN通信模块的研发

基于CCP协议的汽车ABS标定系统CAN通信模块的研发单荣明;李浩
【期刊名称】《汽车零部件》
【年(卷),期】2010(000)002
【摘要】CAN总线以其通信效率高、可靠性强、连接方便等优点在汽车电子领域得到了广泛的应用.CCP协议作为CAN通信系统的标定协议,以主从机通信模式实现了CAN网络中标定工具对一个或多个控制器的在线标定和实时监测.基于CCP 协议的汽车ABS标定系统CAN模块的研发,为ABS控制系统的开发提供了准确、实时的通信保证,显著缩短了ABS控制系统的开发周期.
【总页数】3页(P49-51)
【作者】单荣明;李浩
【作者单位】重庆邮电大学汽车电子与嵌入式系统研究所,重庆,400065;重庆邮电大学汽车电子与嵌入式系统研究所,重庆,400065
【正文语种】中文
【相关文献】
1.基于CCP协议的电控单元标定系统通信模块 [J], 李高坚;袁观练;周洋;侯献军;邹斌
2.基于CCP协议的ABS标定系统 [J], 郑太雄;郭文浩;岑明;蒋国英;杨勇
3.基于CCP协议汽车电控单元标定系统的设计 [J], 张彧;冯辉宗;岑明;甘海云
4.基于CCP协议的控制器标定系统的研发 [J], 王俊席;杨林;冯静;卓斌
5.基于CCP协议的电控发动机标定系统CAN通信模块的研发 [J], 冯静;王俊席;卓斌
因版权原因,仅展示原文概要,查看原文内容请购买。
基于CCP协议标准的CAN总线测试校准技术
基于CCP协议标准的CAN总线测试校准技术
袁九宇
【期刊名称】《质量与标准化》
【年(卷),期】2006(000)003
【摘要】CAN总线是国际上应用最广泛的现场总线之一,基于CAN总线的技术是汽车领域近年来发展较快的技术之一.国内外该技术的发展出现了许多新的动向,CAN总线不仅仅可以传输数据,还可以进行信息采集,数据较准甚至下载程序.本文所介绍的是以CCP(The CAN Calibration Protocol)通信协议为基础,利用CAN 总线对于控制器ECU(Electronic Control Unit)中运行程序的变量进行观察和修改,并结合作者的研究实践,具体介绍控制器中变量参数的测试校准.
【总页数】7页(P21-27)
【作者】袁九宇
【作者单位】同济大学汽车学院
【正文语种】中文
【中图分类】TN91
【相关文献】
1.基于CAN总线节点的标准化测试系统设计
2.基于标准CAN总线的TTcan协议浅析
3.基于SAE J1939协议的客车CAN总线发动机测试系统
4.基于ASTM E399《金属材料线弹性平面应变断裂韧度的标准测试方法》的COD规校准方法的探讨
5.工业在线校准方法等三个全国标准化专业技术组织在上海市计量测试技术研究院成立
因版权原因,仅展示原文概要,查看原文内容请购买。
ccp协议使用
ccp协议使用一、数据读取与测量CCP协议(CAN Calibration Protocol)主要用于汽车行业的标定和诊断。
它提供了一种标准化的方式来读取和测量ECU(Engine Control Unit)中的数据。
通过使用CCP协议,工程师可以获取发动机、变速器和其他汽车系统的实时数据,从而进行精确的测量和标定。
这些数据可以帮助工程师优化车辆性能,提高燃油经济性,并解决任何潜在的故障。
二、ECU系统处理在汽车中,ECU是控制各种系统(如发动机、变速器、刹车系统等)的关键组件。
CCP协议允许工程师直接与ECU进行通信,以读取和修改其内部的数据和配置。
这使得工程师能够更加精确地控制和调整ECU的行为,以满足特定的性能要求或解决特定的故障。
三、通信方式CCP协议基于CAN总线通信,这是一种广泛用于汽车行业的通信协议。
通过使用CAN总线,CCP协议可以在汽车内部的各种ECU之间进行高速、实时的数据传输。
这使得工程师可以从任何支持CCP协议的设备上远程访问和控制ECU。
四、系统结构CCP协议的系统结构相对简单。
它主要包括以下几个部分:1.硬件接口:用于连接CAN总线和ECU的硬件设备。
2.软件工具:用于读取、写入和测量ECU数据的软件应用程序。
3.数据传输协议:定义了如何通过CAN总线传输数据的规则和格式。
4.诊断和标定协议:定义了如何通过CCP协议对ECU进行诊断和标定的规则和格式。
五、应用领域由于CCP协议在汽车行业中广泛使用,因此其应用领域非常广泛。
以下是一些常见的应用领域:1.发动机标定:工程师可以使用CCP协议来读取和测量发动机的实时数据,然后使用这些数据来优化发动机的性能。
2.故障诊断:通过使用CCP协议,工程师可以诊断和解决汽车中的各种故障,从而提高车辆的可靠性和耐久性。
3.研发和测试:在汽车研发和测试阶段,工程师可以使用CCP协议来验证新设计的性能和功能。
CCP_协议
28
基本命令描述
CONNECT——建立连接(0x01)
CRO CCP
协 议 综 述
DTO
Copyright © 2007. All Rights Reserved. HIRAIN TECHNOLOGIES. V1.0. 2007-10
33
标定工具
CONNECT
CRO:
0x01 0x45 0x00 0x02
20
命令返回码表和错误类别
Copyright © 2007. All Rights Reserved. HIRAIN TECHNOLOGIES. V1.0. 2007-10
31
CCP
协 议 综 述
DAQ模式是如何工作的?
DAQ:Data Acquisition 帧格式:
DAQ PID 相 同 ODT PID 数据 对 应 地址 数据 对 应 地址 数据 对 应 地址 数据 对 应 地址 数据 对 应 地址 数据 对 应 地址 数据 CCP 对 应 地址
Copyright © 2007. All Rights Reserved. HIRAIN TECHNOLOGIES. V1.0. 2007-10
43
基本命令描述
UPLOAD——数据上传(0x04)
数据长度信息 执行后进行地址调整
CRO CCP 协 议 综 述 DTO
44
Copyright © 2007. All Rights Reserved. HIRAIN TECHNOLOGIES. V1.0. 2007-10
40
标定工具
SET_MTA CRO:
控制器
CCP
0x02
0x23
0x00
0x02
CCP_协议介绍
北京九州恒润科技有限公司 2004©CCP 2.1 协议北京经纬恒润科技有限公司On-chipFlash On-chip RAM Debug Interface CANExternalFlash/ROMμCEthernetUSB,FlexRayDiagnostic InterfaceKWP2000 CAN/K-LineNEXUS,AUD, ...μControllerRAM EPROMROM/FLASHASICs油门踏板节气门开度曲轴传感器凸轮传感器空气温度空气质量爆震传感器CAN, Diagnostic H-BridgeIgnitiondriverInjection driverLow side High side节流阀Spark plugs 1 -8Injection coils 1 -8Relais E-Box fan VANOS 1 + 2风扇4 Lambda probes•参数或查表在read-only-memory (ROM or Flash)ROM / FlashFlashRAMRAM•变量拷贝到RAM 作为标定变量•标定后的参数复制到ROM 或flashCalibrationCalibrationEngineerECUCAN Calibration Protocol 是基于CAN ECU1ECU2ECU3CANMaster 标定工具SlaveSlaveSlave台架测试测量ECUCANapeCANape ECUMeasurement••Slave个字节,均为地址和地址对应参数的长度格式为:可以有一个或多个ODTD ata A c q uisition 帧格式:CRO DTOResource Protection Mask(该功能是否受到保护)执行后进行地址调整。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CAN通信标定协议(基于ccp协议)
一、协议简介
该通信协议采用主-从式通信方式,主设备通过CAN总线与多台从设备相连接,主设备是测量标定系统,从设备是需要标定的ECU,主设备首先与其中一个从设备建立逻辑链接,建立逻辑连接后,主、从设备之间所有的数据传递均由主机控制,从设备执行主设备命令后返回包含命令响应值或错误代码等信息的报文,同时从设备可以根据主设备通过控制命令所设置的列表信息,来定时地向主设备传送变量信息,数据的传递是由主设备初始化并且由从设备来执行的,并且是由固定的循环采样频率或者事件触发的。
主设备通过USB-CAN接口与从设备连接,符合CAN2.0协议。
通信过程中,所有报文均为8个字节,它可以包含命令、数据、数据长度、地址等信息。
该通信协议参照ccp协议,可以与INCA,CANape等标定软件接口。
二、通信数据对象
CAN通信采用了两个报文数据对象CRO(命令接收对象)和DTO(命令发送对象),每个对象根据其数据流向,都有一个唯一的ID标志符进行标识,ID标识符可以由用户自行设定。
1.命令接收对象(CRO)
命令接收对象(CRO)用于传递指令代码和内部功能码或主、从设备之间交换的存储区数据,对应的报文帧如图1所示,表1位场说明:
图1 CRO数据格式
表1
2.数据传输对象(DTO)
数据传输对象(DTO)指由从设备反馈的报文。
DTO根据报文首字节PID的值可以由三种形式,见表2:
表2:
(1). CRM和Event Message的报文帧如图2所示:
图2 CRM-Event Message报文帧格式
表3:场说明
(2). DAQ-DTO(Data Acquisition-DTO)的报文帧:
3. 协议命令列表及说明(标注绿色字体部分逐步补充完整)
3.3命令详细说明3.3.1 CONNECT命令:命令接收对象(CRO):
3.3.2 SET_MTA命令:命令接收对象(CRO):
3.3.3 DNLOAD命令:
数据传送对象(DTO):
3.3.4 UPLOAD命令:
数据传送对象(DTO):
3.3.6 DISCONNECT命令:
数据传送对象(DTO):
3.3.8 SET_DAQ_PTR命令:
数据传送对象(DTO):
3.3.9 WTITE_DAQ命令:
3.3.10 START-STOP命令:
数据传送对象(DTO):
3.3.11 CLEAR_MEMORY命令:
3.3.12 PROGRAM命令:
命令接收对象(CRO):
数据传送对象(DTO):
4、标定实现(举例)
建立完善的匹配标定具体流程为:与底层ECU进行连接,监控、在线标定,上载和下载map图,断开连接等操作。
对于匹配标定的2个最主要的任务,就是在线标定和实时监控,它是通过协议命令的组合,来实现的,下面举例说明如何实现:
4.2在线标定。