基于微分几何的汽车主动悬架模糊PID控制研究
基于GA优化控制规则的汽车主动悬架模糊PID控制

基于GA优化控制规则的汽车主动悬架模糊PID控制
王威;薛彦冰;宋玉玲;杜晓晨
【期刊名称】《振动与冲击》
【年(卷),期】2012(031)022
【摘要】主动悬架是未来汽车悬架的主要发展方向,它能根据车身的振动情况主动调整悬架控制力,使悬架处于最优减振状态,关键问题是如何设计控制规则,从而施加最优控制力,达到进一步改善汽车行驶平顺性目的.对此,以车身垂直振动加速度为控制目标,将遗传算法与模糊PID控制策略融合,优化模糊PID控制器控制规则,采用基于GA优化后的模糊PID控制方法对汽车主动悬架进行控制并建立Matlab文本与Simulink相结合的联合仿真模型.仿真结果表明,经GA优化后的模糊PID控制下的主动悬架能很好的减小车身垂直振动加速度,可进一步提高乘坐舒适性.
【总页数】6页(P157-162)
【作者】王威;薛彦冰;宋玉玲;杜晓晨
【作者单位】西北农林科技大学机械与电子工程学院,陕西杨凌712100;山东大学机械工程学院,济南250061;西北农林科技大学机械与电子工程学院,陕西杨凌712100;西北农林科技大学机械与电子工程学院,陕西杨凌712100
【正文语种】中文
【中图分类】O322
【相关文献】
1.基于模糊PID控制的汽车主动悬架研究 [J], 王靖岳;王浩天;张勇
2.基于模拟退火遗传算法的模糊PID控制规则优化 [J], 王乐;王福龙
3.基于模糊PID控制的汽车半主动悬架系统的研究 [J], 王瑞;郭全民
4.基于微分几何的汽车主动悬架模糊PID控制研究 [J], 许伟
5.基于粒子群算法的车辆半主动悬架模糊PID控制的优化研究 [J], 樊智敏;王宝林;樊宇
因版权原因,仅展示原文概要,查看原文内容请购买。
基于联合仿真的主动悬架自适应模糊PID控制研究

基于联合仿 真的主 动悬架 自适应模糊 PD控制研 究 I
陈传 灿 . 哈福 朱
( 0 8 4 上海市 同济大学 汽车学 院) 2 10
[ 摘要]利用 A A S建立 了 14车辆主动 悬架的机械模型 , DM / 运用 MA L B设计 了基于 自适应模糊 PD控制算 TA I
法 的主 动 悬 架控 制 系统 . 过 A A / ot l 块 与 MA L B的 接 口实现 了基 于车 辆 悬 架 多体模 型 的 主 动控 通 D MS C nr 模 o TA
兼顾 平顺 性 和稳 定 性 。主 动悬 架 能 主动 实 时地 产
型 进行 重复 建模 , 旦 f现 问题 , 一 { J 饥械 系统 卡 j ¨
系统都要重新设计 .势必带来繁 的 I 作挝
(c ol f uo o i tde, o g n es y S ag a Ct 2 10 , hn ) S ho o tm bl Su is T nj U i ri , h nh i i 0 8 4 C ia A e i v t y
[ b tat eh n a m dl f ur r e ieat esse s nw setbi e yuigA A . o t l rf cv A src]A m c ai l oe o at hc c v up ni a s lh db s D MS A cnr l rat e c q ev l i o a s n oe o i
制联合仿 真。仿真结果表 明, 采用 自适应模糊 PD控制能取得很好的控制效果 , I 与被动 悬架相比显著地 降低 了
车身加速度和轮胎动位移 , 大大提高 了车辆的乘坐舒适性和操纵稳定性。
[ 关键 词]联合仿真 ; 主动 悬架; 自适应模 糊 PD控制 l [ 中图分类号]U 6 . 4 33 3 [ 文献标 志码 ]A [ 文章编号 ]1 7— 122 1)80 3 — 6 6 3 3 4 (0 20 — 0 3 0
车辆主动悬架的模糊PID控制仿真
车辆主动悬架的模糊PID控制仿真景园;赵强;张娜【摘要】根据某车型悬架参数,建立了1/4车主动悬架Matlab/Simulink模型,选择簧载质量加速度、悬架动挠度、轮胎动载荷作为控制目标量,采用模糊PID复合控制技术,针对该悬架模糊控制模型的设计及仿真.仿真结果表明:与被动控制、PID 控制的悬架系统性能相比,该控制策略系统的簧载质量加速度和轮胎动载荷有了显著降低,有效改善了乘坐舒适性.【期刊名称】《机电产品开发与创新》【年(卷),期】2015(028)006【总页数】3页(P91-92,84)【关键词】主动悬架;模糊PID控制;仿真【作者】景园;赵强;张娜【作者单位】东北林业大学交通学院,黑龙江哈尔滨150040;东北林业大学交通学院,黑龙江哈尔滨150040;东北林业大学交通学院,黑龙江哈尔滨150040【正文语种】中文【中图分类】TP3不同于固定阻尼和刚度系数的车辆被动悬架,阻尼可调的主动悬架不仅能够适应车辆载荷、行驶速度以及路面的不平程度变化达到有效减震的目的,还可以调节刚度控制悬架侧倾。
从结构而言,主动悬架实际是一个主动力的发生器。
因此,控制策略的优劣对主动悬架控制效果有极大影响。
其中利用现代控制算法中应用比较广泛的研究有:陈志林利用了渐近稳定自适应控制[1];Yoon Y S等利用最优控制算法得到二次型性能指标[2];孙涛在电流变液磁流变半主动悬架上试验了模糊PID控制[3]等等。
其中PID控制具有原理简单、使用方便等优点应用最广泛,而车辆主动悬架控制系统为多自由度、多参数的非线性系统,常根据经验法不断调试确定PID的参数。
本文选用模糊PID控制,将模糊推理运用于PID参数的整定,以根据经验制定控制规则得出控制决策表,然后求出控制量的大小,不再需对控制对象精确建模,并通过Matlab/Simulink进行了建模及仿真分析。
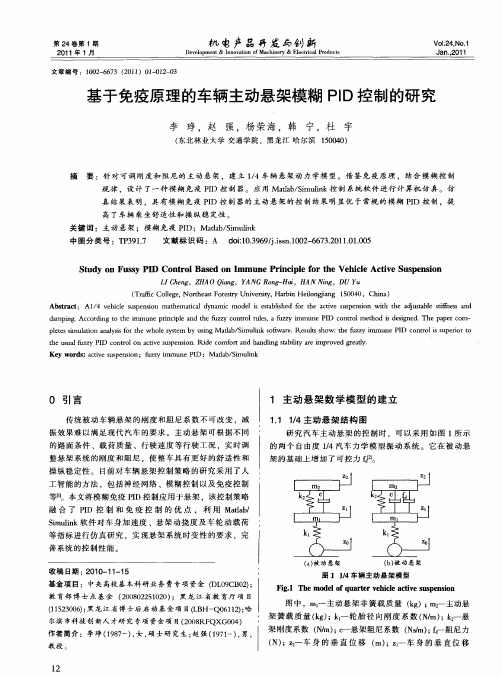
1/4 车辆主动悬架理想模型如图1所示。
其模型根据牛顿定律满足以下动力方程:式中:m1—主动悬架非簧载质量(kg);m2—主动悬架簧载质量(kg);k1—轮胎径向刚度系数(N/m);k2—悬架刚度系数(N/m);c—减振器的阻尼系数(Ns/m);z2—车身簧载质量的垂直位移(m);z1—车身非簧载质量的垂直位移(m);z0—路面激励(m);fd—作动器的输出力(N)。
基于免疫原理的车辆主动悬架模糊PID控制的研究
关 键 词 :主 动 悬 架 ;模 糊 免 疫 PD ;M aa /i lk I d b Smui n
中 图 分 类 号 :T 3 1 P 9. 7
文 献 标 识 码 :A d i 03 6 /.s . 0 — 6 32 1.1 0 o: .9 9 jsn1 2 6 7 . 1 . 5 1 i 0 0 O 0
d mpng a i .Ac ori o t e i m u e p n il n ef z o to u e,af zy i c dng t h m n r cpea d t uzy c n r lrls z mm u e P D o r lm eh d i eine Th a rc m- i h u n I c nto t o sd s g d. e p pe o
架 的 基 础 上 增 加 了可 控 力 。
振 效果难 以满 足现代 汽 车的要求 。主动悬 架可 根据不 同 的路面 条件 、载荷 质量 、行驶 速度 等行驶 工况 ,实 时调
整 悬 架 系 统 的 刚度 和 阻 尼 。使 整 车 具 有 更 好 的 舒 适 性 和
操 纵稳定性 。 目前 对车 辆悬 架控 制策 略的研 究采 用 了人
St y o Fu s D nt o s d o m m i n ud n s y PI Co r lBa e n I e Prncpl or t h c e Ac i e Su pe so
L h n ,Z A i g A GR n- a,H NM 凡 , I eg H 0 Q a ,Y N C n og H i A g DUY u
工 智能 的方 法 .包 括神 经 网络 、模 糊控 制 以及免 疫控制
车辆主动悬架模糊PID控制的仿真与分析

车辆主动悬架模糊PID控制的仿真与分析
贾毅朝
【期刊名称】《拖拉机与农用运输车》
【年(卷),期】2009()3
【摘要】以车辆操纵稳定性及行驶平顺性为控制目标,确定车身加速度为具体评价参数。
根据路面-车辆系统的特点,提出将模糊控制理论和PID控制策略有机结合后运用于主动悬架控制。
针对简化后的两自由度主动悬架模型,以路面信号作为激励源进行仿真研究。
结果表明,这种控制策略对车辆悬架系统的振动控制具有更好的适应性。
【总页数】3页(P90-91)
【关键词】主动悬架;PID控制;模糊控制
【作者】贾毅朝
【作者单位】山西运城学院机电工程系
【正文语种】中文
【中图分类】U463.33;TP273.4
【相关文献】
1.车辆主动悬架的模糊PID控制仿真 [J], 景园;赵强;张娜
2.车辆主动悬架的模糊PID控制器仿真分析 [J], 郑灿;赵云;陈乐生
3.车辆半主动悬架系统的模糊PID控制及仿真 [J], 党宝英
4.基于模糊-PID控制策略的越野车辆主动悬架联合仿真研究 [J], 李海青;文强
5.车辆半主动悬架动力学分析及模糊PID控制仿真 [J], 张慧刚;杨建伟;李捷;贾志绚
因版权原因,仅展示原文概要,查看原文内容请购买。
汽车发动机主动悬置模糊控制研究

汽车发动机主动悬置模糊控制研究潘公宇;肖云强;任成【摘要】压电陶瓷作动器作为一种主动作动器,运用到发动机悬置中具有重要的意义.从压电陶瓷作动器力学模型出发,运用实验对其特性进行了研究.同时建立了发动机五自由度主动悬置模型以及路面谱模型;分别设计了基于压电陶瓷主动悬置系统的模糊控制器和SIRMs模糊控制器,并利用Matlab/Simulink软件进行仿真研究.结果表明SIRMs模糊控制相对于传统模糊控制和被动悬置可以有效的减小发动机质心加速度,车身质心加速度以及悬置动行程,同时明显提高了汽车的乘坐舒适性.%As an active actuator, piezoelectric ceramic actuator has vital significance when applied in engine mount. Experiment research on its peculiarity is conducted based on the dynamic model of piezoelectric ceramic actuator. At the same time, five degrees of freedom active engine mount model and road surface spectrum model are built;The fuzzy controller and the SIRMs fuzzy controller are designed based on the system of piezoelectric ceramic active engine mount, then simulated in Matlab/Simulink. The results show that SIRMs fuzzy control can reduce the center of mass acceleration of engine, the center of mass acceleration of car body and the mount motion effectively compared with the traditional fuzzy control and passive mount. At the same time, the vehicle ride comfort is improved obviously.【期刊名称】《机械设计与制造》【年(卷),期】2017(000)0z1【总页数】5页(P133-136,140)【关键词】压电陶瓷作动器;主动悬置;模糊控制;SlRMs模糊控制【作者】潘公宇;肖云强;任成【作者单位】江苏大学汽车学院,江苏镇江 212013;江苏大学汽车学院,江苏镇江212013;江苏大学汽车学院,江苏镇江 212013【正文语种】中文【中图分类】TH16;TH171 引言随着高速公路的发展,车速的提高,人们对于汽车乘坐舒适性提出了更高的要求,而发动机作为汽车的动力源所引发的振动越来越被人们所关注。
驾驶室半主动悬置模糊PID控制策略研究
驾驶室半主动悬置模糊PID控制策略研究
史津华;金阳
【期刊名称】《汽车实用技术》
【年(卷),期】2024(49)9
【摘要】为了研究商用车驾驶室阻尼可调式半主动悬置对汽车乘坐舒适性的影响,在TruckSim中建立了整车模型与左右轮迹不平度模型,在MATLAB/Simulink中搭建了比例-积分-微分(PID)和模糊PID控制器模型,并且根据相关文献中的连续阻尼可调(CDC)减振器外特性试验结果建立了执行器模型,通过TruckSim和Simulink联合仿真的方式进行了研究。
以商用车驾驶室垂向、俯仰和侧倾加速度的均方根值之和作为驾驶室的振动评价指标,对比了50 km/h和90 km/h车速下采用被动悬置和半主动悬置的驾驶室振动情况。
仿真结果表明,相较于被动悬置,基于PID与模糊PID的半主动悬置均能够明显改善商用车驾驶室的平顺性,两种控制策略控制效果非常接近,在两种工况下使驾驶室整体振动情况改善约13.28%和14.02%。
【总页数】7页(P60-66)
【作者】史津华;金阳
【作者单位】湖北汽车工业学院汽车工程学院
【正文语种】中文
【中图分类】U463.33
【相关文献】
1.汽车发动机主动悬置模糊PID控制策略研究
2.基于模糊控制的商用车驾驶室悬置有限带宽主动控制系统研究
3.含MRD的拖拉机驾驶室悬置系统半主动控制研究
4.基于PID控制的载货汽车驾驶室半主动悬置控制
5.驾驶室半主动悬置天棚阻尼控制策略研究
因版权原因,仅展示原文概要,查看原文内容请购买。
车辆主动悬架系统的模糊控制仿真研究
车辆主动悬架系统的模糊控制仿真研究
李敏;杨建伟
【期刊名称】《机械工程与自动化》
【年(卷),期】2009(000)003
【摘要】根据汽车悬架的结构,建立了二自由度1/4车体主动悬架模型.为了提高汽车的乘坐舒适性和安全性,车辆采用主动悬架系统.由于模糊控制具有建模简单、控制精度高、非线性适应性强等优点,在车辆主动悬架控制策略中得到了较广泛的应用.设计了以车身速度和加速度为输入的模糊控制器,实现了对主动悬架的控制.同时,以某种车型为仿真对象,使用MATLAB/Simulink进行计算机仿真,达到了改善车辆垂直减振的目的.仿真结果表明:采用所设计的模糊控制策略的主动悬架系统,明显提高了车辆乘坐的舒适性和安全性.
【总页数】4页(P20-23)
【作者】李敏;杨建伟
【作者单位】太原科技大学,机械电子工程学院,山西,太原,030024;太原科技大学,机械电子工程学院,山西,太原,030024
【正文语种】中文
【中图分类】U463.33;TP391.9
【相关文献】
1.半主动悬架车辆的整车模糊控制仿真研究 [J], 王然
2.车辆主动悬架的模糊PID控制仿真 [J], 景园;赵强;张娜
3.基于整车的汽车半主动悬架系统模糊控制仿真研究 [J], 周玉丰;吴龙
4.车辆半主动悬架动力学分析及模糊PID控制仿真 [J], 张慧刚;杨建伟;李捷;贾志绚
5.汽车磁流变半主动悬架系统模糊控制仿真研究 [J], 周玉丰;吴龙
因版权原因,仅展示原文概要,查看原文内容请购买。
汽车半主动悬架的模糊PID控制仿真研究
汽车半主动悬架的模糊PID控制仿真研究
刘潜;王天利
【期刊名称】《农业装备与车辆工程》
【年(卷),期】2011(000)007
【摘要】悬架系统关乎汽车的平顺性、操纵稳定性和轮胎接地性能。
根据汽车振动参数对悬架系统进行有效控制,可使车辆运行在安全、舒适的条件下。
通过建模,对半主动悬架的模糊PID控制、PID控制和被动悬架进行了对比仿真分析。
结果表明模糊PID控制具有较好的控制效果,其中合理整定模糊PID的参数和确定模糊控制规则至关重要。
【总页数】4页(P21-23,29)
【作者】刘潜;王天利
【作者单位】辽宁工业大学,辽宁锦州,121001;辽宁工业大学,辽宁锦州,121001【正文语种】中文
【中图分类】U463.33
【相关文献】
1.基于遗传算法优化的汽车半主动悬架PID控制仿真研究 [J], 孟杰;杨海鹏;陈庆樟;张凯
2.基于整车的汽车半主动悬架系统模糊控制仿真研究 [J], 周玉丰;吴龙
3.汽车半主动悬架系统模糊控制仿真研究 [J], 徐晓美;郑燕萍
4.二自由度汽车磁流变半主动悬架最优控制仿真研究 [J], 贾永枢
5.汽车磁流变半主动悬架系统模糊控制仿真研究 [J], 周玉丰;吴龙
因版权原因,仅展示原文概要,查看原文内容请购买。
《2024年度基于智能控制的汽车主动悬架控制策略研究》范文
《基于智能控制的汽车主动悬架控制策略研究》篇一一、引言随着汽车工业的快速发展,人们对汽车行驶的平稳性、安全性和舒适性要求日益提高。
主动悬架系统作为汽车的重要组成部分,对提升车辆行驶性能和驾驶体验具有重要意义。
智能控制技术的发展为汽车主动悬架控制策略的优化提供了新的途径。
本文将重点研究基于智能控制的汽车主动悬架控制策略,以提高汽车的行驶性能和驾驶舒适性。
二、汽车主动悬架系统概述汽车主动悬架系统是一种具有自适应能力的悬架系统,能够根据道路状况和车辆行驶状态实时调整悬架参数,以改善车辆的行驶性能和驾驶舒适性。
主动悬架系统通常由传感器、控制器和执行器等部分组成,其中控制器是核心部分,对悬架系统的性能起着决定性作用。
三、智能控制在汽车主动悬架系统中的应用智能控制技术如模糊控制、神经网络控制、遗传算法等在汽车主动悬架系统中得到了广泛应用。
这些智能控制方法能够根据不同的道路状况和车辆行驶状态,实时调整悬架参数,以实现最优的悬架性能。
1. 模糊控制模糊控制是一种基于模糊逻辑的控制方法,能够处理不确定性和非线性问题。
在汽车主动悬架系统中,模糊控制能够根据传感器采集的信号,实时调整悬架的阻尼、刚度等参数,以改善车辆的行驶性能和驾驶舒适性。
2. 神经网络控制神经网络控制是一种模拟人脑神经网络结构的控制方法,具有自学习和自适应能力。
在汽车主动悬架系统中,神经网络控制能够根据大量的驾驶数据和道路信息,自主学习并优化悬架参数,以实现更好的行驶性能和驾驶舒适性。
3. 遗传算法遗传算法是一种模拟自然进化过程的优化算法,能够在复杂的非线性系统中寻找最优解。
在汽车主动悬架系统中,遗传算法能够根据车辆的行驶状态和道路状况,寻找最优的悬架参数组合,以实现最佳的行驶性能和驾驶舒适性。
四、基于智能控制的汽车主动悬架控制策略研究针对不同的道路状况和车辆行驶状态,本文提出了一种基于智能控制的汽车主动悬架控制策略。
该策略采用模糊控制、神经网络控制和遗传算法等多种智能控制方法,根据传感器采集的信号实时调整悬架参数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
77 10.16638/j.cnki.1671-7988.2019.09.026 基于微分几何的汽车主动悬架模糊PID控制研究
许 伟 (四川工商职业技术学院,四川 成都 611830) 摘 要:文章以汽车主动悬架为研究对象,结合二自由度非线性汽车主动悬架动力学模型,利用微分几何理论将非线性模型精确线性化后,首先设计PID控制器,为抑制干扰因素影响而引起系统参数或结构改变,提高悬架系统应对复杂工况下的自适应能力,然后设计了利用模糊控制原理对PID参数进行在线整定的自适应模糊PID控制器。仿真结果表明:相比于参数固定的被动悬架系统,采用该控制方法的主动悬架能够轻松应对各种工况,不仅在保证改善汽车乘坐的舒适性的情况下,同时进一步改善了车辆的行驶平顺性和行驶安全性,为汽车主动悬架系统控制策略设计提供实用性参考。 关键字:微分几何;汽车主动悬架;模糊PID控制 中图分类号:U463.33 文献标识码:A 文章编号:1671-7988(2019)09-77-05
Fuzzy-PID control for automobile active suspension based on differential geometry theory
Xu Wei ( Sichuan Technology&Business College, Sichuan Chengdu 611830 )
Abstract: In this paper,Taking the automobile active suspension as the research object, combined with two degree of freedom nonlinear dynamic model of vehicle active suspension, using the theory of differential geometry is the exact linearization of nonlinear model, PID controller is designed first, and to suppress interference factors affecting parameters in the system or structure change, improve the suspension system to deal with complex working conditions is the adaptive ability, and then design by using fuzzy control theory to the PID parameters online setting of adaptive fuzzy PID controller. The simulation results show that compared with fixed parameters of the passive suspension system, the control method of active suspension can easily deal with all kinds of conditions, not only in the case of a guarantee to improve vehicle ride comfort, and further improve the vehicle riding comfort and driving safety, for the automotive active suspension system control strategy is designed to provide practical reference. Keywords: Differential geometry; Automobile active suspension; Fuzzy-PID control CLC NO.: U463.33 Document Code: A Article ID: 1671-7988(2019)09-77-05
前言 悬架系统是关系汽车乘坐舒适性、行驶平顺性和安全性
的重要部件。限于制造成本、技术等多方面因素,目前大多
汽车悬架仍采用传统的被动悬架,其弹性和阻尼参数固定,不随工况变化而调控,自适应能力较差,故难以保证车辆行驶在各种工况下对乘坐舒适性、行驶平顺性与安全性要求。包含控制执行机构、以现代电控技术为基础的主动悬架可较作者简介:许伟,男,硕士,四川工商职业技术学院助教,主要研
究方向为智能控制与智能自动化。 汽车实用技术 78 好地解决被动悬架系统所存在的问题[1]。 控制策略是实现悬架系统最优控制的保证,也是当今悬架控制系统研究发展的一个重要方面[2]。在汽车悬架控制策略研究中,PID控制简单有效、易于工程实现,成为汽车悬架控制策略设计重要控制方法之一,PID控制方法虽降低了控制器的设计难度,但因PID参数设计完成后无法调整,自适应能力差,无法应对复杂路况下汽车对乘坐舒适性、行驶平顺性和安全性的要求,因而许多学者开始关注智能控制策略与PID控制相结合的自适应控制[3-5]。文章根据汽车悬架实际受力情况,选择二自由度非线性汽车主动悬架动力学模型作为研究对象,利用微分几何理论将非线性模型精确线性化后,实施了模糊PID控制,通过在线调整PID参数来适应各种复杂路况。 1 汽车主动悬架动力学模型 1.1 非线性汽车主动悬架动力学模型 文章选择如图1所示的二自由度非线性汽车主动悬架模型,并假设其非线性作用体现在悬架弹簧上,由牛顿第二定律,即可得到如下动力学微分方程[6],式中悬架参数表示具体含义如表1所示。 (1) 图1 二自由度非线性汽车悬架模型 表1 悬架参数对应具体含义 1.2 路面输入模型 汽车悬架系统所受的激励来源于路面的不平度,是汽车行驶过程中最主要的激励。相关研究表明,按照给定路面不平度功率谱变换为路面不平度的滤波白噪声方法,可以获得路面输入模型[7]。
(2) 式中:q(t)为路面位移,单位m;f0为下限截止参考频率,通常取f0=0.1Hz;G(n0)为路面不平度系数,单位为m3;W(t)为零均值的高斯白噪声。
2 非线性汽车主动悬架动力学模型线性化 2.1 微分几何理论 在工程技术应用时,常常需要对非线性系统进行线性化处理。常规的近似线性化方法因存在较大的线性化误差而致使线性化后的线性模型不够精确,大大影响实际的控制效果。基于微分几何理论的线性化方法因没有线性化误差,可实现非线性系统的精确线性化,相比于常规控制方法可以获得更优的系统控制效果。因此,微分几何理论已成为实际非线性系统进行线性化处理时的理想工具。其精确线性化的基本思想如下: 考虑如下仿射非线性系统[8]
(3) 式中x∈Rn,f(x)=[f1(x),f2(x),…,fn(x)]T,g(x)=[g1(x), g2
(x),…, gm(x)]T,y=h(x)是标量函数。
[定义1] 标量函数y=h(x)Hz沿f (x)的一阶Lie导数为:
(4) 那么y=h(x)对f (x)的k阶Lie导数为: (5) [定义2]假如存在的一个邻域V和正整数r使式(3)同时满足以下两个条件: (1) (2) 那么则系统(式(3))在x0点处有相对阶r。 [定理1] 假如系统(式(3))存在r相对阶,则可以通过如下状态反馈
(6) 对非线性系统(式(3))进行精确线性化,这里v是线性化后系统的控制力。 2.2 非线性汽车主动悬架动力学模型线性化 定义系统状态矢量 ,选取观测输出量,那么非线性汽车主动悬架动力学模型(即式(1))可整理为: (7) 许伟:基于微分几何的汽车主动悬架模糊PID控制研究 79 式中:
对于非线性主动悬架系统,f (x)和g (x)的维数k=0,y=x1=h(x)。因此,根据上述定义1和定义2,当k=0时,有:
当k=1,同理有: 因此,非线性主动悬架系统(式(7))的相对阶r=2。那么y=h(x)对f (x)的2阶Lie导数为:
根据定理1,可得到状态反馈控制: (8) 将上式中的u代入式(7)中,即可求得非线性主动悬架系统的精确线性化数学模型: (9)
式中:
3 基于微分几何理论的非线性汽车主动悬架的PID控制设计
3.1 PID控制 PID控制器是一种线性控制器,其系统主要由PID控制器和被控系统两部分组成,控制系统原理框图如图2所示。PID控制律的数学表达式为:
(10) 式中:u (t)为PID控制器的实际输出值;为r (t)为给定输入值;y (t)为实际被控系统输出值;e(t)为误差,e(t)= r(t)-y(t);Kp为比例系数;Ki为微分系数;Kd为积分系数。
图2 PID控制系统原理框图 3.2 基于微分几何理论的非线性汽车主动悬架的PID控制设计 为获得更佳的乘坐的舒适性,选择车身垂直振动加速度作为汽车悬架系统的主要控制目标。将车身垂直振动加速度的目标值与实际输出值比较并得到其误差值,并将误差信号传输到 PID 控制器以获得控制线性作动器作用力v,并将v代入式(7)获得非线性悬架系统主动控制力u,其中,期望车身垂直振动加速度的目标值越小越好,取r(t)=0。 借助Matlab /Simulink软件平台,搭建基于微分几何的非线性汽车主动悬架的PID控制仿真模型。其中,PID控制器设计的关键是整定Kp、Ki、Kd这3 个参数。文章研究采用典型的试凑法对PID 控制参数进行整定,先调节比例系数Kp,后调节积分系数Ki,最后调节微分系数Kd,同时观察悬
架动态响应,兼顾系统超调量和响应速度[9]。经过反复调试得到控制器的最佳参数分别为:Kp=10,Ki=10,Kd=0.5。
4 基于微分几何理论的汽车主动悬架模糊PID控制设计
常规PID控制因其参数Kp、Ki、Kd一旦设计好后不能在线调整,因而自适应能力较差,难以胜任复杂工况。模糊控制能够应对系统模型存在不确定性误差等问题,且具有一定的自适应能力和鲁棒性,广泛应用于线性和非线性系统。借助模糊控制在线整定PID参数,满足复杂工况下对汽车乘坐舒适性、行驶平顺性和操纵稳定性的要求。 4.1 模糊PID控制器的结构 模糊PID控制原理如图3所示。以车身垂直振动速度、加速度趋于零作为控制目标,即模糊控制器的两输入为误差、误差变化率,对应的模糊语言变量分别为E和EC;PID控制器修正参数△kp、△ki及△kd作为模糊控制器的输出,对应的模糊语言变量为△kp、△kI及△kD。经过模糊控制在线整定后获得PID控制器修正参数△kp、△ki及△kd,将其带入如下表达式即可获得PID控制器获得最终的控制参数kp、ki及kd。