排爆机器人介绍
《德国排爆机器人》课件

价值和意义
Байду номын сангаас强调德国排爆机器人的价值和 意义,如构建更安全、高效的 未来社会。
深入了解德国排爆机器人使用的传感器技术,如摄像头、红外线和激光雷达等。
应用场景
主要用途
揭示德国排爆机器人应用于军 事、警务和消防等领域的主要 用途。
实战表现
展示德国排爆机器人在实际应 用中的表现,如救援行动和恶 劣环境中的排爆任务。
发展前景
展望未来德国排爆机器人的发 展前景,包括技术创新和应用 领域的拓展。
启示与借鉴
总结德国排爆机器人给其他 领域带来的启示和借鉴,如 自动化技术和人机协作。
技术创新的影响
分析德国排爆机器人对技术 创新的影响,如推动人工智 能和机器人技术的发展。
结论
未来前景
展望未来德国排爆机器人的发 展前景,如更智能化、灵活性 和多功能性。
对未来世界的启示
阐述德国排爆机器人对未来世 界的启示,如机器人在人类生 活中的作用和影响。
相关技术挑战
1
技术难点
探讨德国排爆机器人面临的技术难点,如自主导航、环境感知和精准控制等。
2
技术进展
介绍德国排爆机器人在技术方面的突破,包括人工智能、机器学习和自动化控制 等。
3
技术趋势
展望未来德国排爆机器人的技术趋势,如更高的智能化和更强的自主能力。
意义与启示
意义和价值
探讨德国排爆机器人的社会 意义和价值,如保护人员安 全和提升工作效率。
《德国排爆机器人》PPT课件
# 德国排爆机器人 ## 概述 - 什么是排爆机器人? - 德国排爆机器人的发展历程 - 德国排爆机器人的特点
排爆机器人的技术原理
构成
介绍德国排爆机器人的构成要素,包括机械结构、电子元件和传感器等。
排爆机器人工作原理

排爆机器人工作原理
排爆机器人工作原理是基于先进的机器视觉和机器学习技术,以及精密的机械装置和操作系统。
以下是其工作原理的简要描述:
1. 感知与识别:排爆机器人配备了多种传感器,如摄像头、红外线和热成像传感器等,用于感知目标物体和环境。
机器人通过图像识别和目标检测算法,将感知到的图像信息转化为可用的数据,并识别出潜在的爆炸物。
2. 规划与导航:一旦发现潜在的爆炸物,机器人需要规划最佳路径并导航到目标位置。
它使用内置的导航系统,结合地图和定位信息,计算出安全可行的路径,并进行自主导航。
3. 操作与处理:到达目标位置后,排爆机器人通过机械装置,如机械臂、夹钳等,进行操作和处理。
机器人可以使用机械臂来拆卸或移除潜在爆炸物,或使用夹钳进行非接触式操作。
机器人还可能配备激光器、水枪等工具,用于破坏或中和爆炸物。
4. 通信与控制:排爆机器人通过无线通信与操作员进行远程控制和交互。
操作员可以通过控制站点或操纵台控制机器人的移动、操作和处理流程。
机器人也可通过视频传输和语音通信,将实时图像和声音传回操作员,以便于远程指导和监控。
5. 安全与保护:为了确保排爆机器人工作的安全性,机器人通常配备了抗爆炸和防护装置。
这些装置包括防弹和防爆外壳、防爆传感器和故障检测系统等,以提供额外的保护和安全性。
综上所述,排爆机器人通过感知、识别、规划、导航、操作和处理等步骤,实现对爆炸物的探测、中和和处理。
其工作原理基于先进的技术和系统,可以提高排爆工作的效率和安全性。
地面排爆机器人的应用
器人可以伸入汽车底部或各种物体的底部进行摄 像侦察及抓取可疑物品。在动作时,大臂向下, 中臂水平,小臂略向上。这种位姿对物体的底部 侦察是行之有效的。
(2)图 7 是 super--D Ⅱ型排爆机器人大臂 向上,中臂接近水平,小臂垂直地面的一种姿 态。这种姿态便于机器人从筒状容器抓取爆炸 物或将爆炸物抓取后放入防爆罐和车载防爆球
发火电流 1 安培,只要按动起火装置,电发火 弹的火药就会被点燃产生强大的高压气体,高 压气体使枪膛中的水形成高压并以高压射流的 形式在极短的时间内射向爆炸物,使爆炸物的 外包装及内部组件受到破坏和解体并失去爆炸 的可能性(在正常情况下,爆炸物的雷管和炸 药 不 会 因 此 而 爆 炸 ),达 到 既 保 证 排 爆 人 员 、 机器人的安全,又能排除爆炸物的目的。因 此,爆炸物销毁器是排爆机器人和排爆专业人 员的武器之一。如果说排爆机器人没有了爆炸 物销毁器,就失去了一半作用,再没有了机械 手就完全失去了作用。
地面排爆机器人 o杨 德智 明 守远 的应用
北京中泰通科技发展有限公司
地面排爆机器人主要用于代替人工,直接 在案发现场排除和处理爆炸物以及其他危险品, 也可以对一些持枪的恐怖分子及犯罪分子实施 有效攻击,是排爆专业队伍中必不可少的重要 装备。
一 、排 爆 工 作 的 基 本 程 序
机器人技术与应用 30
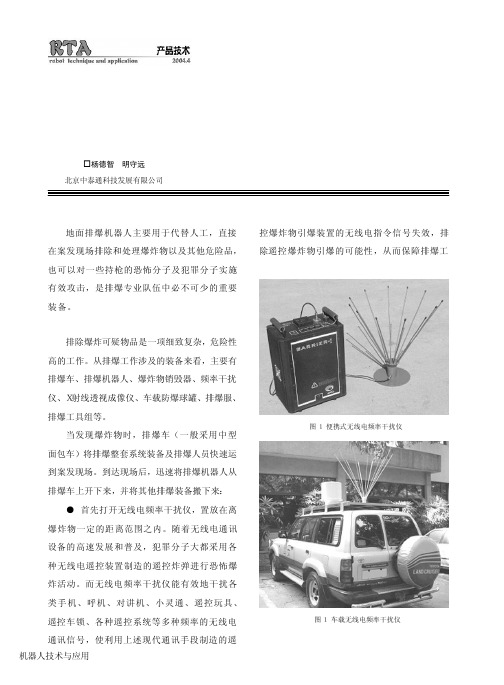
控爆炸物引爆装置的无线电指令信号失效,排 除遥控爆炸物引爆的可能性,从而保障排爆工
图 1 便携式无线电频率干扰仪
图 1 车载无线电频率干扰仪
作的 顺 利 进 行 。无 线 电 频 率 干 扰 仪 有 两 种 类 型 , 一 种为手提便携式(图 1 ),一种为车载 式(图 2 )。手提便携式由排爆人员手提放在离 爆炸物合适的位置;车载式安装在排爆车上,功 率大,干扰信号覆盖面积大,应用更加机动方 便。其主要技术参数如下:
雪豹20排爆机器人

雪豹20
新一代排爆机器人,用于代替人工在危险区域进行危险物搜索和排除,减少人员伤亡。
机器人能适应野外恶劣环境,能够抓取15公斤可疑物,放置带线引爆装置;能通过更换专用手抓实现不同形状目标的抓取。
技术指标
全重:200kg
连续工作时间:>2h
最大行驶速度:3km/h
越障能力:0.15m
爬坡能力:30
最大遥控距离:1000m
最大抓取重量:15kg
机械臂最大展长:1.8m,
摄像头方向视界:360℃
工作温度:-20℃—50℃
体积:1.75m*0.72m*0.7m
主要特点:
四自由度手臂关节,操纵更简单。
越野性能强,能够适应草原、戈壁、碎石地、水泥地等多种地形环境
防尘防水等级达到IP53;可在-20℃~+50℃的温度、湿度≤80%的环境中正常工作。
具备手臂末端控制、手臂自动折叠
防车体倾斜、防误操作、导航修正、自动避障等功能。
采用模块化设计,手臂等关键部件可快速更换。
机械臂末端具有可更换接口,可根据要求安装相应的作业器械或辅助工具。
遥控终端人机界面友好,具有触摸屏、控制面板按钮两套输入模式,操控方便。
雪豹50排爆机器人

雪豹50
一、车身参数
1、质量:70Kg;
2、尺寸:长719mm×宽430mm×高513mm;
3、主要配置:机械臂, 轮履结合,轮胎可拆卸,前摆臂,4路监控摄像头,被动式电缆或光线揽轴,音频输入/输出接口;
4、外观:封闭式车身,涂装根据客户要求定制;
5、电源:锂电池;
6、工作时间: 2h;
7、最大侧倾角:20°。
8、主要控制键:驾驶摇杆,机械臂控制钮,2路点火电路选择开关,紧急停车开关;
9、监控设备:液晶监视器,用于显示4路图像;
10、接口:视频与音频输入/输出接口;USB接口;天线接口;有线控制接口。
11、控制方式:无线遥控,遥控距离500m;有线控制,100m被动式电缆或光纤。
12、车身监控:①底盘前端(机械臂底部):LED高清摄像头②底盘后端:LED高清摄像头③机械手监控:LED高清摄像头;④机械臂/全局监控:2自由度云台摄像头(手动升降杆)。
13、机动性能
14、爬坡能力:最大爬坡坡度45度;
15、离地间隙:履带50mm,车轮90mm;
16、行进方式:前进,后退,前进转向,后退转向,原地转向;
17、速度:松手即停,旋钮调速,履带最高速度3Km/h,轮胎最高速度4.5Km/h。
二、工作机构
1、机械臂:展开长度1.6m或2m可选;
2、大臂工作角度:-7°~+180°;
3、机械臂转盘:±90°;
4、机械臂关节组成:腰关节、大臂、小臂、腕部、伸缩臂、360°旋转关节、机械手;
5、机械臂最大负载:展开状态2kg;
6、机械手:①最大开口230mm②抓力为1kgf/cm2。
排爆机器人市场分析报告

01
排爆机器人市场增长迅 速,未来潜力巨大
02
技术进步是市场增长的 关键因素
03
市场竞争激烈,需要不 断创新和优化产品
04
政策支持对市场发展具 有重要影响
05
排爆机器人在公共安全 领域具有广泛应用前景
06
建议加强技术研发,提 高产品质量,拓展市场 渠道,提高品牌知名度
01
02
03
04
提高技术水平: 加强研发投入, 提高排爆机器人 的性能和稳定性
01
02
03
市场竞争激烈,国内外品牌竞争 激烈
技术进步推动市场发展,智能化、 自动化趋势明显
市场需求多样化,定制化、专业 化产品需求增加
04
政策支持力度加大,市场空间进 一步扩大
05
市场竞争格局不断变化,新兴品 牌不断涌现,爆机器人的技术,以应对 不断变化的爆炸物威胁。
03
法规限制:各国对排爆机器人 的使用和进口都有严格的法规 限制,需要遵守相关法规。
成本控制:排爆机器人的研发 和生产成本较高,需要降低成 本以提高市场竞争力。
02
市场需求:排爆机器人的市场 需求相对较小,需要拓展市场 以提高销量。
04
01
市场需求:随着 恐怖袭击和公共 安全事件的增多, 排爆机器人的需 求不断增长
03
排爆机器人具有较强的抗干扰能力, 能够在电磁干扰、噪声干扰等恶劣环 境下正常工作。
04
排爆机器人具有较高的智能化水平, 能够自主完成排爆任务,降低人工操 作风险。
政府机构:主要用于公共安全、反恐等领域,需求量较大 军事部门:主要用于排雷、排爆等军事行动,需求量相对稳定 企业单位:主要用于安保、排爆等任务,需求量较小 民间市场:主要用于个人防护、救援等,需求量较小
博创排爆机器人Raptor
排爆机器人Raptor-EOD
排爆机器人的介绍:Raptor-eod机器人是北京博创集团开发的一款中型特种排爆排险机器人,用于处置各种突发涉爆、涉险事件。
代替以往人工排出可疑爆炸物及在危险品搬运过程中对操作者带来的危险,该机器人具备大型排爆机器人的基本功能,体积小、重量轻,便于更快的在突发事件中部署与执行任务。
相对大型排爆机器人具有更广阔的适应性,已装备全国多地公安武警部队。
详细说明:
● 外形紧凑,长约0.8米,宽约0.5米,可以在会场过道、飞机机舱中自如活动,在各种大型机器人
无法进入的狭窄环境中执行任务
长宽高:820X480X650mm
重量: 38kg(底盘) / 57kg(全配置)
最大负载:不低于20kg
最大爬坡角度:不小于30度
最大越沟宽度:不小于200毫米
机械手最大夹持宽度:200毫米
机械手最大抓持重量:收起时不小于5kg 平伸不小于1.5kg
运动灵活,最高速度30米/分钟
3台CCD摄像机,其中一台具有10倍光学变焦
满负荷连续工作2小时以上
有线/无线控制自由切换
可以在各种地形环境工作,包括楼宇、户外、建筑工地,会场内,机舱内、甚至坑道、废墟。
灵活的4关节机械手可以轻松处置藏于汽车底部的可疑物品。
自带照明,在黑暗中操作时可以准确分辨物体颜色及位置。
●丰富的选配件
可附加摄像机,喊话器,放射线探测器,毒品探测器,散弹枪,各种水炮枪,探照灯等。
模块化设计,电池可在2分钟内快速更换
遥控/线控可选。
遥控距离100-300米,线控距离50-100米。
排爆机器人
排爆机器人
品牌:浦喆
指标:
一、行走装置
1.仰角履带式行走,仰角33°
2.四轮双驱动
3.具有前进、后退、转弯、爬坡、爬楼梯等功能,可以在各种地形环境中工作,包括楼宇、户外、建筑工地,会场内、机舱内、甚至坑道、废墟。
4.运动灵活,行走速度:37米/分钟
二、工作装置
1.二臂杆4+1自由度
2.机械手360°无卡阻旋转,开合距离 230毫米
3.腰转(水平旋转)±120°
4.手臂伸展长度1.1米,最大抓重10公斤以轻松处置藏于汽车底部的可疑物品。
机械手上直接架设水炮枪,任务处置更灵活。
三、视频系统
1.一个两自由度(水平360°无卡阻,上下-45°~+120°)云台彩色调焦摄像机,二个低光(彩转黑)定焦摄像机
2.12.1″彩色液晶显视器
3.单画面切换
四、控制系统
1.上位机控制箱面板操作
2.无线和有线控制,两种方式可选。
3.操控距离100米,有线电缆卷筒手动收放线
五、水炮枪(选配)
1.口径38毫米
2.双路激光瞄准
3.双路减震器
4.电起火操控
六、外形尺寸:长1050毫米×宽520毫米×高720毫米
七、电源:DC24V、锂电池、配充电器。
大型排爆机器人技术分析
2 大型排爆机器人结构设计
(1)机械系统。①车体结构。车体是保障排爆机器人能 够完成行走功能的重要部分,车体能够根据大型排爆机器人的 工作环境与地形,改变前臂、后臂的形态,避免在越障、过沟 时对手臂造成破坏,影响正常使用。同时,车体还能根据地形 的倾角测量车体仰俯幅度,并向远程操作人员提供相应提示, 避免对系统造成损坏[1]。②机械手结构。机械手是排爆机器人 进行作业的主要部位,在垂直方向上具有较大的力量,使得系 统具有较强的适应性。腰、大臂、小臂是为机械手提供力量的 主要部位,提供垂直、平行、摆动方向的力量。在设计时,主 要是对大、中、小臂以及手爪进行设计,由腰部提供主要力量 来源,其中,大臂与中臂采用的是电动推杆进行连接,可有效 减少推程,并保证排爆机器人能够抓取重量较大的目标物体。 当机械手在抓住目标物体后,手腕便不动了,并在推杆的作用 下,将物体抛出,极大地减少电机能耗。手爪部位采用的是四连 杆机构,该机构可保证机械手在断电后不会松手,且保证手爪末 端在抓取物体时始终保持平行状态,当遇到圆形物体时,又会抓 换成菱形结构,增强机械手的适应性,有利于提升排爆机器人的 整体性能。
前言
恐怖活动成为制约现今世界和平与经济发展的关键因素, 在西方发达国家,排爆机器人技术已经趋于成熟,而我国对于 该设备的研制与投入较少。在反恐形势逐渐严峻的背景下,大 型排爆机器人成为科研领域的重点内容。因此,加强对大型排 爆机器人技术的研究与应用,对增强我国反恐能力、保障人民 生命财产安全,具有十分重要的现实意义。
全部整合排爆机器人使用说明
全部整合排爆机器人使用说明关键信息:1、排爆机器人型号:____________________________2、操作权限:____________________________3、适用场景:____________________________4、维护周期:____________________________5、故障处理流程:____________________________11 引言本协议旨在为用户提供关于全部整合排爆机器人的详细使用说明,以确保其安全、有效地执行排爆任务。
111 排爆机器人概述排爆机器人是一种专门设计用于处理危险爆炸物的高科技设备,具备先进的传感器、机械臂和控制系统。
112 主要功能包括但不限于探测爆炸物、抓取和转移爆炸物、远程操控等。
12 操作前准备121 操作人员培训操作人员必须经过专业培训,熟悉机器人的操作流程和应急处理方法。
122 环境评估在使用前,对操作环境进行全面评估,确保无干扰因素影响机器人工作。
13 启动与连接131 电源接入按照正确的方式接入电源,并检查电源指示灯是否正常。
132 通信连接建立稳定的通信连接,确保操作人员与机器人之间的数据传输流畅。
14 操作界面介绍141 主控制界面详细说明各个控制按钮、参数显示区域的功能和含义。
142 监控画面解释监控画面中不同图像和数据的代表意义。
15 移动控制151 前进、后退、转弯操作明确操作指令对应的移动动作和速度控制方法。
152 越障能力及应对策略介绍机器人在遇到不同障碍物时的处理方式。
16 探测功能使用161 传感器类型及工作原理阐述机器人所配备的各类传感器,如红外、化学等传感器的工作原理。
162 探测模式选择根据不同的任务场景,选择合适的探测模式。
17 机械臂操作171 抓取动作控制精准控制机械臂的抓取力度和角度。
172 精细操作技巧如何进行微小物品的抓取和操作。
18 排爆流程181 发现爆炸物如何确认爆炸物的位置和类型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
防爆机器人产品特点:
1. 越障能力强,鳍臂式履带结构,使机器人翻越楼梯、沟 壑等障碍。 2. 运动速度快,相当于人小跑速度,无级变速,低速状态 下同样具备较大扭矩。 3. 体积小、重量轻,可单人背负,可放入轿车后备箱内, 运输方便。 4. 一体化机械臂云台,5+2自由度设计,抓取、观察灵活。 5. 模块化设计,电池模块、云台模块、机械臂模块可快拆 卸、更换,方便维护。
THANKS
山东卡特智能机器人有限公司
2020
防爆机器人
kate08
目录
CONTENTS
01
防爆机器人产品简介:
02
防爆机器人产品特点:03防爆机器人应用来自境:防爆机器人产品简介:
防爆机器人是一款小型模块化排爆机器人,主要可用于危险物品抓取、转移、销毁等作业,同时 机器人手臂具有七个自由度,活动灵活,亦可用于狭小空间侦察作业。机器人行走模块采用"鳍臂 式"履带结构,使机器人具备了强的越障能力,可适应沙地、瓦砾、草地等多种复杂地形。机器人 结构坚固、轻巧,防尘、防水、防震、防腐蚀,各项性能指标均达到标准要求。
防爆机器人主要参数:
防爆机器人主要参数: 结构形式:摆臂+轮式+履带三合一结构,适合多种地形, 大臂:采用双电动撑杆升降,角度:0-90度 可伸缩臂:采用悬浮丝杠结构,伸缩范围:0-45cm往复运动。 小臂:采用涡轮自锁结构,0-180度转动。 机械爪:三轴,360度连续旋转。 腰转系统:腰盘直径150毫米,转动角度左60度,右90度。 轮子:带快释放的气动轮胎(轮胎尺寸10.0”/25.0cm)。据需要可与驱动系统脱离。 照明:前后各采用一组发光二极管灯照明(一组肆个)。 电源:24V快换直流电池组(两组12V,14A/h安时电池)。 充电器:110或220交流变24V直流。
10.机器人运动灵活、地形适应能力强;可装备水炮枪进行 销毁作业。
防爆机器人应用环境:
1. 公共场所(地铁、机场、火车站、商场、会议场所等)可疑物品转移、销毁。 2. 哑弹排除、路边排除、地雷排除等应用环境。 3. 危险生化及有害环境内物品抓取、转移。 4. 灾后废墟环境内侦察、探测,物品抓取、转移。 5.核辐射环境内物品抓取、转移,简单探测、维修作业。
6. 防护性强,防尘、防水、防震、防腐蚀,各项性能指标 均达到标准要求。
7. 智能程度高,具备一键展开、一键复位、辅助抓取、辅 助越障等多种智能操作功能。
8.机器人控制箱采用人性化图形操作界面,容易上手,主屏 幕显示 信息,副屏幕显示辅助操作信息。
9. 在有电磁干扰状况下,机器人可使用线缆盘进行远程操 作、控制。