进化算法的PID参数最优设计
遗传算法入门实例:对 PID 参数寻优
遗传算法入门实例:对PID参数寻优[原创][这乌龟飙得好快啊]开始之前:假设你已经:能运用C语言,初步了解PID、遗传算法的原理。
遗传算法能干什么?(我有个毛病:每当遇到一个东东,我首先会设法知道:这个东东能干什么呢?)遗传算法可以解决非线性、难以用数学描述的复杂问题。
也许这样的陈述让你觉得很抽象,把它换成白话说就是:有个问题我不知道甚至不可能用数学的方法去推导、解算,那么也许我就可以用遗传算法来解决。
遗传算法的优点是:你不需要知道怎么去解决一个问题; 你需要知道的仅仅是,用怎么的方式对可行解进行编码,使得它能能被遗传算法机制所利用。
如果你运用过PID来控制某个系统,那你一定非常清楚:PID麻烦就在那三个参量的调整上,很多介绍PID的书上常搬一些已知数学模型的系统来做实例环节,但事实上我们面对的往往是不可能用数学模型描述的系统,这个时候该怎么取PID的参值呢?1、可以依靠经验凑试,耗时耗精力。
2、离线规划,这就是下文要做的事情3、在线规划,比方说神经网络PID(后续文章将推出,做个广告先^_^)。
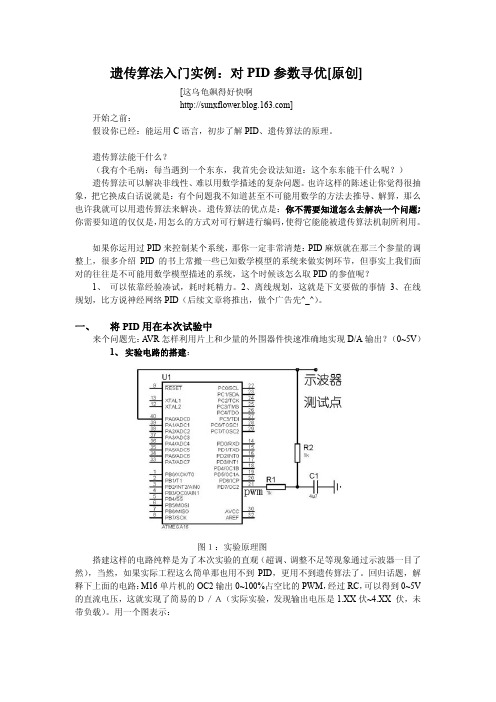
一、 将PID用在本次试验中来个问题先:A VR怎样利用片上和少量的外围器件快速准确地实现D/A输出?(0~5V)1、实验电路的搭建:图1:实验原理图搭建这样的电路纯粹是为了本次实验的直观(超调、调整不足等现象通过示波器一目了然),当然,如果实际工程这么简单那也用不到PID,更用不到遗传算法了。
回归话题,解释下上面的电路:M16单片机的OC2输出0~100%占空比的PWM,经过RC,可以得到0~5V 的直流电压,这就实现了简易的D/A(实际实验,发现输出电压是1.XX伏~4.XX 伏,未带负载)。
用一个图表示:这个时候如果我要输出 3.5V (可以是其它值)电压,该加怎样的PWM呢?(有个简单的方法:标定,但是这种方法系统调整响应速度较为缓慢,理由见图5下附言)也许我们可以把这个输出电压加到A/D反馈到系统,这样就形成了闭环控制:系统输出PWM ——>> PWM 转换成电压——>>A/D 采集,获得实际值与目标值的偏差(例如3.5V )——>>将偏差进行PID 加载到PWM 输出(然后输出又影响下一次的输入……)把示波器加到测试点上,调整扫描周期,使示波器能看到完整的一个调整过程。
PID参数整定方法进展

文章编号:1006-6705(2001)03-0004-03收稿日期:2001-05-14作者简介:李剑(1978-),女,重庆人,华北电力大学硕士生,从事自动控制在电厂中的应用研究。
PID 参数整定方法进展李 剑,谷俊杰(华北电力大学动力系,河北保定071003)Development of Tuning Methods for PID ParametersL I Jian ,GU J un -jie(North China Electric Power University ,Baoding 071003,China )摘要:PID 控制器是用途最广的控制器,对常规PID 参数整定方法和一些先进整定方法作了较全面的综述,并比较了各种方法的特点。
最后还指出目前PID 参数整定研究的热门方向。
关键词:PID 控制器;参数整定;控制算法中图分类号:TP272 文献标识码:AAbstract :PID controllers are the most widely used controllers.S ome conventional and advanced tuning methods for PID pa 2rameters tuning are comprehensively summarized in the paper.The characters of each method are compared.The key issues in the study of PID parameter tuning are presented.K ey w ords :PID controllers ;parameter tuning ;control algo 2rithmPID 控制器自产生以来一直是工业生产过程中应用最广的控制器,目前大多数工业控制器都是PID 控制器或其改进型。
尽管在控制领域,各种新型控制器不断涌现,但PID 控制器还是以其结构简单、易实现、鲁棒性好等优点,处于主导地位。
非最小相位系统PIPD控制器的优化设计
比例增益Kp的引入是为了及时地反映控制系统的偏差信号,一旦系统出现了偏差,比例调节作用立即产生调节作用,使系统偏差快速向减小的趋势变化。当比例增益Kp增大的时候,PID控制器可以加快调节,但是过大的比例增益会使调节过程出现较大的超调量,从而降低系统的稳定性,在某些严重情况下,甚至可能造成系统不稳定。
1.
PID控制器是工业过程控制中最常见的一种过程控制器。尽管工业自动化飞速发展,但是PID控制技术仍然是工业过程控制的基础。根据日本有关调查资料显示,在现今使用的各种控制技术中,PID控制技术占84.5%,优化PID控制技术占6.8%,现代控制技术占1.6 %,手动控制占6.6%,人工智能(AI)控制技术占0.6%。如果把PID控制技术和优化PID控制技术加起来,则占到了90%以上,且工业过程控制中,95%以上的回路具有PID结构[5]。因此,可以毫不夸张地说,随着工业现代化和其他各种先进控制技术的发展,PID控制技术仍然不过时,并且它还占着主导地位。
通常使用的量是描述控制系统稳定性的超调量和衰减比以及用来描述控制回路响应速度的时间常数和振荡频率获得决定不同控制器参数应该减少或增加的相应的规则比较容易但确定相应的量较难因此基于规则的整定方法更适于连续自适应控制与基于模型的整定方法相比基于规则设定值变化
基于自适应遗传算法的控制器PID参数优化研究

P , 0 . 9 , 变异概率为G= o . 2 0 一 [ 1 : l : s i z e l × 0 . 0 1 / S i z e 。 采用实数编
码方式 , 参数 的取值范围为【 9 . 0 , 1 2 . 0 ] , 的取值范 围为【 O . 2 , 0 . 3 】 。 ( 2 ) 仿真结果 的比较 。 分别采用传统 遗传算法和 自适应 遗传算 法, 整定后P I D 控 制器 的各个参数如表1 所示 , 优化后对象的阶跃响 应如 图l 所示 。 由图l 可 以看 出, 采用传统算法整定P I D 参数 , 控制器的上升时 间为0 . 0 4 s , 调整时间为0 . 0 6 s , 而采用 自适应遗传算法优化后 , 控 制 器的上升时间为0 . O l s , 调整时间为0 . 0 3 s , 因此采用 自适应遗传算法 优化后的P I D参数更精确 、 合理一些 , 大大提高了控 制器的动态响应 速 度。
图 1控制器的阶跃响应
表 1两种不同算法优化后的 P I D参数表
f P I D参数 I 传统遗传算法 『 自适应遗传算法
1 9 . 0 8 2 3 l 7 . 1 2 9 0
算 法分 析
渗
。 l 与 应 用
基于 自适应遗传算法的控制器 P I D参津航 空机 电有限公 司 天津 3 0 0 3 0 8 )
摘要: 针 对 传 统遗 传 算 法存 在 进 化速 度 慢 、 局 部 搜 索 能 力不 足 、 易 陷入 早 熟收 敛 等 问题 , 本 文 在 传 统遗 传 算 法 的基 础 上 采 用一 种 自适 应 遗传算 ̄( A d a p t i v e Ge n e t i c A l g o r i t h ms , AG A ) , 用于P I D控制 器参数优化 问题 。 以某控带 】 器为例, 仿真结果表 明, 采用 自适应遗传算法优化后的
基于模拟退火遗传算法的PID参数整定与优化
基 于模 拟 退 火 遗传 算 法 的 PD参数 整 定 与优 化 I
李凌 宇, 郭贵法 , 许锦标
( 广东工业 大学 自动化学院 , 广东 广州 5 0 0 ) 10 6
摘要 : 结合模拟退火算法和遗传算法 的思想 , 出模拟退火遗传算 法 , 提 用此算 法进行 PD参 数整定与优化. I 同时使
Agrh s , 根据 固体退 火思 想 , l i m )它是 ot 为解 决 大 规模
组合 优化 问题 , 别 是 N 特 P问 题 完全 组 合 优 化 而 设
足 降低温 度 , 此 控 制再 生 操 作 之后 按 自适应 概 率 依
对种 群 进行 交 叉 、 异操 作 . 样种 群 不 断进 化 , 变 这 直
遗传算法¨ 刮简 称 G G nt l rh s , A( eecAgi m ) 它 i ot 是 根据 自然界 的遗传 机理 而设计 的一种 全新 概念 的
优 化方 法 , 是一 种 建 立 在生 物 界 自然 选 择原 理 和 自
Nc o 法 、 oe — on法 、 优控 制 法 ( i l h s C h nC o 最 误差 积 分指
标最优 )稳定 边 界法 等 , 时还 有 梯度 法 以及 单纯 、 同
形法等 , 但这 些方 法都有 一定 的局 限性 . 文采 用 自 本 然遗传机制的随机搜索方法, 它模拟 了生物界 中的 适应在 线模 拟退 火 遗传 算 法 5 刮对 PD参 数 进行 整 I 生命进化 机制 , 在人 工系统 中实现 特定 目标 的优 化. 定与寻优 , 是一 种在传统遗传算法基础上而改进 的 在2 纪 6 0世 0年 代 , 由美 国 Mi i n大 学 的 JH. 优 化方 法 , 有更好 的寻 优效果 . cg ha . 具 Ho ad教 授 在 《 d pa o n N trla d At c l ln l A at i i a a n rf i tn u i a i
改进遗传算法在PID优化中的应用
第3 7卷 第 1 期 7
、 1 7 ,. 0 3
・
计
算
机
工
程
2 1 年 9月 01
S p e e 0 e t mb r 2 1 1
No1 .7
Co p t rEn i e rng m ue gn ei
人工 智 能及 识 别技 术 ・
文章编号t1o-32( 11-o4—o oo_48 o ) -19 3 文献 2 17 标识码: A
[ y wo d ]o t lslt n g n t lo tm;d u l eis meh ns Ke r s pi oui ; ee c ag rh ma o i i o be li tm ca i m;Po ot n Itga o i ee t t nPD)cnrl r rp ro ne rt n D f rni i (I i i ao o t l ;mut oe l— i ojcie pi zt n bet t a o v o mi i D0I 03 6 /is.0 03 2 .0 iI.5 :1.9 9 . n10 —4 82 1.70 0 js .
{ 2… , , (O≤ L(2 且 a ∈{ 2… , ,f(1<f(2 。 1 , m1 x , x) j 1 , m) j") j ) , l f x
基于量子粒子群优化算法的PID参数控制
第2 2期
21 0 2年 8月
科
学
技
术
与
工
程
Vo.1 No 22 Aug 2 2 1 2 . . 01
17 — 1 1 f 0 2 2 —49 O 6 1 8 5 2 1 )2 58 -4
S in eT c n lg n n n e n c c e h oo ya d E  ̄ e 6 g e
出算法 的有 效性和所设计控制器 的优越性。 关 键词 量 子粒 子群 PD参数 I 遗传算法 A 自适应控 制 中图法分类号 T 3 16 P0. ; 文献 标志码
比例 、 分 、 分 控 制 器 简 称 PD 控 制 器 j 积 微 I 。 PD控 制 器 是 在 工 业 过 程 中最 常见 的一 种 控 制 方 I 法 ,I PD控 制 的优 点 是 原 理 简 单 , 用 方 便 , 棒 性 使 鲁 强 , 控制 品质 对 过 程 变 化 的灵 敏 度 较 低 , 有 无 其 具
优值附近, 但后期 的优化效率不 高, 使其局部搜 索
能力 较弱 。
现提 出 了一种基 于量 子 粒 子 群 算 法 ( P O) Q S 优 化 PD控制算 法 , I 基本 P O 算法 _ 收敛 速度快 、 S 4 运
余差功能 , 适用性 较广 , 可用 于各种工业 控制。但 保守的 PD控制器参数整定采用手动调整 , I 其控制
⑥
2 1 SiT c. nr. 0 2 c. eh E gg
基于量子粒子群优化算法 的 PD参数控制 I
赵振 江
( 沈阳化 工大学 计算机科学与技术学院 , 沈阳 10 4 ) 1 12
摘
要
针 对传 统 PD算法参数最优或接近最优确定 较为困难, 出一种量 子粒子群 ( P O 优 化 PD参 数的算法。并用平 I 提 QS) I
差分进化算法及其应用研究
第四,针对建模在应用中带来的不便,以及不确定性的因素造成的被控对象 时变和非线性,基于ITAE控制律,提出了差分进化PID控制器在线进化结构, 实现了PID参数在线整定。该方法不要求事先获取被控对象的精确数学模型,因 而具有一定的工程应用价值。
关键词:进化计算、差分进化、差分策略、早熟收敛、PID整定
河海大学硕士学位论文
Abstract
Differential Evolution(DE)iS a heuristic optimization algorithm based on population divcrsity.Due tO its simple structure,less control parameters and good robustness.DE has received more and more attention by researchers and is widely used in many practices.There are many differential strategies.The typical strategies among them which attracted more attention and got more application btit still owned certain faults are DE/rand/1 and DE/best/1.Premature convergence and loeal searching ability ale still the main issue.So for enhancing the Ix'rformance ofDE,it is
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第26卷第1期 2005年1月 华侨大学学报0自然科学版)
journal of Huaqiao I ll、’crsiD _\ lt Lit L ̄.I Science)
文章编号 1000—5013(2005)01—0085—04
VoL 26 NO.i Jan.2005
进化算法的PID参数最优设计 周凯汀 郑力新 (毕侨大学信息科学与工程学院.福建泉州362021)
摘要提出用进化算法最优设计PID参数的方法,获得最优设计结果.分析控制系统常用性能指标作为进化 评价函数的不足.构建控制系统新的评价函数.为使优化筷型简化.设计参数采用实数编码及归一化处理.进 化算法使用新型的,以基因为单位进化的遗传算法.数值实验表明.设计结果得到显著改善. 关键词PID.遗传算法,性能指标,优化设计 中图分类号TP 273 .1:TP 18 文献标识码 A
PID控制器原理简单,形式固定,鲁棒性好.几十年来始终占据工业控制器的主流,使用率达8O 以上.因此,研究PID参数的整定技术具有重要意义.ZN法是整定PID控制器的经典方法,它能够使系 统形成闭环投入工作,但存在超调量大的严重缺陷,系统的工作状态尚待优化.近年来,模拟生物进化过 程的遗传算法(GA)作为求解优化问题的有效手段.开始被引入控制系统的设计中.GA采用非数值计 算方法和随机进化策略,无需梯度信息,能有效地攻克十分困难的优化问题.它处理问题具有灵活性、适 应性、鲁棒性和全局性,不仅能提高设计品质.而且降低了设计的难度,本文提出了一种用遗传算法优化 设计PID参数的方法.与同类研究相比n ?,具有如下3个特点.(1)为了得到最优的设计结果,分析了 控制系统常用性能指标的缺陷,并构建丁一个更有效的新指标.(2)采用实数编码,并利用ZN法的合 理内核对寻优参数进行了归一化处理,使优化模型碍以简化,从而增强程序的鲁棒性.(3)使用新型的 以基因为单位进化的遗传算法,提高了设计效率.
1 控制系统的性能指标 在控制系统的进化设计中,性能指标作为遗传算法的评价函数指导着种群的进化,它的真实、准确、 灵敏程度对最终解的影响不容忽视.从已有研究报道可以看出,性能指标局限于常用的IAE,ISE, ITAE种ISTE等上,所得到的解有一定的改善,『旦还不能说很理想.IAE,ISE,ITAE和ISTE等常用指 标的优点是,仅含有误差与时间两个变量,容易从系统输出响应中直接获得;而缺点是指标算式中的误 差始终以绝对值形式出现,无法区分正负误差.此外,没有直接反映出超调量和过渡时间这两项衡量控 制系统优劣的重要内容. 基于上述分析,本文提出了一个衡量控制系统性能的新指标,即 F一 厂 _I(1一 ) , 其中f。一1.0一expF一(2d ) ],厂2—1.0一exp[-~(2t /q) ],J8为加权系数.d,t 为系统的超调量与 过渡时间, ,£ 为与ZN法参数所对应的超调量与过渡时间.以厂1函数为例,当 为零,即系统的超调 量为零时,厂。的值为零,取最小值;随着比值 / 的增大,函数厂。陡然增大,即系统超调量 的微小变 化将引起厂。的急剧变化,使得该厂。指标对系统超凋量的变化十分敏感.厂。随 / 的变化关系,如图i 所示.厂2与£。/£ 具有完全类似的关系.
收稿日期 2004~02—18 作者简介周凯汀(1968一).女.副教授.主要从事智能仪器与控制的研究.E—mail:zlxzktl@people.com.cp 基金项目 华侨大学科研基金资助项目(02HJR05)
维普资讯 http://www.cqvip.com 86 华侨大学学报(自然科学版) 2005正 图1 fl与 / 比值的关系 新指标F将厂 与 用加权系数卢综合在一起,可以根据对超调量或者过渡时间的偏好设置加权
系数,使用起来十分灵活.
1一 一 l 图2典型PID反馈控制系统 是dIIl k 一∈Eo,1],ki 一∈Eo,1],kd :∈Eo,1]为新的设计参数.文中,取kp =1.6・ ,kp 一0.3。 是:,另两个参数是i,是d的上下限则设定为与此相似.即是~ 一1.6・是i。,是.皿|D一0.3・忌 ,是dma 一1.6‘是 , 是 i 一0.3・是 .在保证系统稳定的前提下,规定不同的上、下限系数可重新设定搜索空间,但k ,ki ,kdc 的取值区间则始终不变,恒为[O,1].如此处理简化了寻优参数搜索空间的规定,程序也更为简单可靠. 综上所述,系统优化模型可归纳为minJ(J—ISE,IAE,ITAE,ISTE,F);基于O≤是 ≤1,O≤ki ≤1,0 ≤是fc≤1.
3 遗传算法 遗传算法有两个重要控制参数——交叉率P 和变异率P 对算法的效率有较大影响,本文研究使 用了一种新型自适应遗传算法.该算法摒弃了以往自适应遗传算法∞ 以染色体为单位进化的观念而 改为以基因为单位进化,使遗传算法的效率得到进一步提高.下述P 和P 的计算方法. 令种群的染色体个数为M,每个染色体所含的基因种数为N,则种群全体可以用一矩阵表示为
X(M,N)一
维普资讯 http://www.cqvip.com 第1期 周凯汀等:进化算法的PID参数最优设计 87 由欧式距离衡量第 种基因之间的差异,即 M.¨ 2∑(工 一zJ,I)。
一砑 兰 _二二 ’
而该基因对应的交叉率和变异率分别为 P ( )一min{ d ,0.625},P ( )= (1一P ( )), (2) 其中z一 ,z i 为第 种基因的最大值与最小值, , 为设定常数.式(2)合理地兼顾了基因间差异对 和的调整作用,以及P 和P 的经验取值范围.例如,当 取5, 取0.5时,便将P 和P 限制于区 间[-o,0.625]和[-o.187 5,0.53内.本文的优化设计有5个步骤过程.(1)全局变量设定.给出种群数M, 系数 , ,最大世代数MAXGEN的大小.(2)种群的产生及初始化.设世代计数器gen一1.以归一化 所得的参数k ,k¨志 为基因组成染色体x,即 x—Ek ,k kdc]. 种群由M个染色体构成,为x(M,3)矩阵.初始染色体中的基因在Eo,1]范围内随机产生.(3)基因交 叉率与变异率计算.在X(M,3)矩阵中逐列选中基因,按式(1)计算对应平均欧氏距离,再按式(2)求出 对应的交叉率和变异率.(4)进化操作.先复制种群.在复制的种群中,按各列基因对应的交叉率和变异 率逐列进行基因的交叉(采用算术交叉)。 和变异(在[O,1]区间随机地产生一个数来取代原有值),形成 个子代染色体.然后,进行同一世代染色体的评价与选择.将染色体逆映射于PID参数空间获得对应 的PID参数,然后将PID参数代人仿真程序计算阶跃响应及评价函数 .选出其中 值最小的M个染 色体构成新种群,并显示本世代的最佳染色体的评价值.(5)过程结束判定.如果gen ̄MAXGEN,回 到步骤(3)重复进行;如果gen≥MAXGEN,则存贮最佳染色体.绘制最佳染色体的输出响应曲线,结束 求解过程.
4数值实验例 文献[8]提供了采用不同方法来设计PID参数的实例.其控制对象的模型为 G㈦一 . 按ZN法得是 一2.813,ki 一1.719,k2—1.151.其对应系统性能指标为d 一43 , 一5.1 S.分别以 ISE,IAE,ITAE,ISTE,F为评价函数,取M一20,MAXGEN一40, 一5, 一0.5,采用Matlab语言在 计算机上完成本方法设计,所得结果如表1所示.其中G ,Pu为系统的幅值裕度与相位裕度.暂且 抛开超调量和过渡时间相互关联的事实,表1的设计结果显示,由其他指标所得的最佳超调量为 表1 采用不同性能指标的进化结果及相应系统参数(误差带取2 ) 评价函数 F ITAE ISTE IAE ISE 2.0028 2.2566 2.3132 2.3355 2.4091 0.9819 l_O99O 1.1555 1.1278 1.3365
6.73 (ITAE指标)、最短过渡时间为3.31 s(ISTE指标),而F指标的超调量d 一0.35 仅为上述最 佳值的5.2 ,过渡时间t 一1.76 S仅为上述最短过渡时间的53.2 ,频域指标G ,P 也是最好的.由 此可见,F指标带来了显著改善的设计结果.各指标.厂值的归一化平均变化范围,如图3所示.由图看 出,F指标的评价值(K)变化范围最大,说明它能灵敏地反映出系统性能的微小改变.由此看来,F指标 能够灵敏地反映出系统的性能,而且能准确地指导着遗传算法的进化方向,与ISE,IAE,ITAE和ISTE 等常用指标相比,具有更好品质.图4为各指标设计结果对应的系统单位阶跃响应曲线,其纵轴为归一 化输出值y(即输出与输入之比值),其量纲根据实际对象确定.采用本文的遗传算法,最优结果出现的 平均世代数为14.5,采用文献<93的简单遗传算法和文献<33的以染色体为单位进化的自适应遗传算 法,最优结果出现的平均世代数分别为28.7和20.1,显然,本文的遗传算法具有显著提高的效率.
维普资讯 http://www.cqvip.com 88 华侨大学学报(自然科学版) 2005正 O O
5 结束语 图3不同指标对应的进化过程 () 2 4 ,,s 6 8 图4不同指标对应的阶跃响应
用遗传算法优化设计PID参数是为了获得一个最优控制,除了前文所述的几个特色之外,本文的 突出优势在于获得了显著改善的设计结果,更好地实现了设计的初衷.这一改善是由新建立的控制系统 评价函数带来的.本文中,F是以ZN法对应的超调量与过渡时间为参照,实际上,作为参照的超调量与 过渡时间也可以做其它合理的选择,限于篇幅,这里不再赘述.总之,本文的基本思想与方法具有普遍 性,可以在电气、电子等较复杂系统的参数优化问题中得到广泛的应用.
1 2
3 4
8 9
参 考 文 献 Porter B.Jones A H.Genetic tuning of digital PID controllers[J].Electron.Lett..1992.28:843~844 Wang P.Kwok D B.Optimal design of PID process controllers based on genetic algorithms[J].Control Engng.Prac— rice.1994.2(4):641~648 吴斌.吴 坚.快速遗传算法研究[J].电子科技大学学报.1999.28(1):49~53 Fushuan Wen.New approach tO alarm processing in power systems based on the set covering theory and a refined ge—