控制工程基础第四版董景新课后答案
控制工程基础课后作业解答(新)
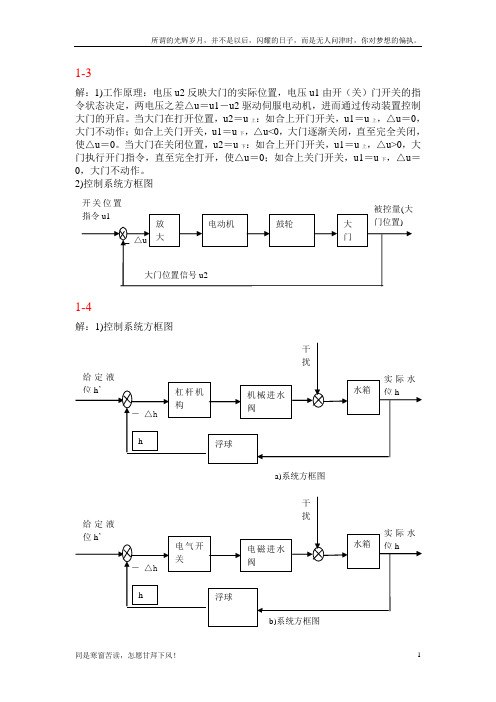
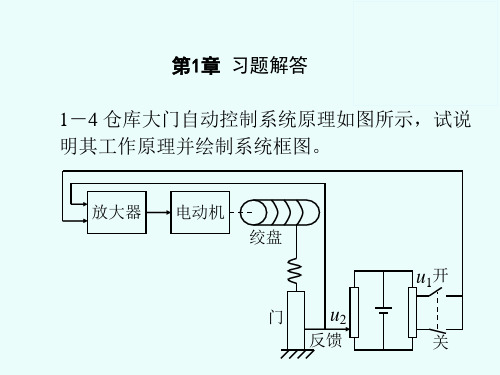
1-3解:1)工作原理:电压u2反映大门的实际位置,电压u1由开(关)门开关的指令状态决定,两电压之差△u =u1-u2驱动伺服电动机,进而通过传动装置控制大门的开启。
当大门在打开位置,u2=u 上:如合上开门开关,u1=u 上,△u =0,大门不动作;如合上关门开关,u1=u 下,△u<0,大门逐渐关闭,直至完全关闭,使△u =0。
当大门在关闭位置,u2=u 下:如合上开门开关,u1=u 上,△u>0,大门执行开门指令,直至完全打开,使△u =0;如合上关门开关,u1=u 下,△u =0,大门不动作。
2)控制系统方框图1-4解:1)控制系统方框图2)工作原理:a)水箱是控制对象,水箱的水位是被控量,水位的给定值h ’由浮球顶杆的长度给定,杠杆平衡时,进水阀位于某一开度,水位保持在给定值。
当有扰动(水的使用流出量和给水压力的波动)时,水位发生降低(升高),浮球位置也随着降低(升高),通过杠杆机构使进水阀的开度增大(减小),进入水箱的水流量增加(减小),水位升高(降低),浮球也随之升高(降低),进水阀开度增大(减小)量减小,直至达到新的水位平衡。
此为连续控制系统。
b) 水箱是控制对象,水箱的水位是被控量,水位的给定值h ’由浮球拉杆的长度给定。
杠杆平衡时,进水阀位于某一开度,水位保持在给定值。
当有扰动(水的使用流出量和给水压力的波动)时,水位发生降低(升高),浮球位置也随着降低(升高),到一定程度后,在浮球拉杆的带动下,电磁阀开关被闭合(断开),进水阀门完全打开(关闭),开始进水(断水),水位升高(降低),浮球也随之升高(降低),直至达到给定的水位高度。
随后水位进一步发生升高(降低),到一定程度后,电磁阀又发生一次打开(闭合)。
此系统是离散控制系统。
2-1解:b) 确定输入输出变量x1,x2 )(212dtdx dt dx B kx -= 得到一阶微分方程:dtdxB kx dt dx B122=+ (c )确定输入输出变量(u1,u2) 22111R i R i u += 222R i u = ⎰-=-dt i i C u u )(11221 得到一阶微分方程:1121221222)1(u R Rdt du CR u R R dt du CR +=++d)确定输入输出变量x1,x2 )()(2112122x x k dtdx dt dx B x k -+-= 得到一阶微分方程:1112212)(x k dtdxB x k k dt dx B+=++ (e )确定输入输出变量(u1,u2)⎰++=idt CiR iR u 1211121Ruui-=消去i得到一阶微分方程:CudtduRCudtduRR1122221)(+=++f) 确定输入输出变量x1,x2)()(211322xxkxxk-=-)(3223xxkdtdxB-=消去x3得到一阶微分方程:1112121221)1(xkdtdxkkBxkdtdxkkB+=++得到一阶微分方程:1112212)(xkdtdxBxkkdtdxB+=++2-2解:1)确定输入、输出变量f(t)、x22)对各元件列微分方程:222213311111122222232121311;)(;)()()()()()(xKfdtxxdBfdtdxBfxKfdttxdmfffdttxdmtftftftfKBBKBKBBBK=-====--=---3)拉氏变换:)()()()]()([)()]()([)()()(22222222131212131111sXsmssXBsXKsXsXsBsXsmsXsXsBssXBsXKsF=---=----4)消去中间变量:)()()()(23223232131123sXsBsmsBKsBsmsBKsBssXBsF++++++=+5)拉氏反变换:dtdfB x K K dt dx B K B K B K B K dtx d K m m K B B B B B B dt x d m B m B m B m B dt x d m m s s 3221232123121222212122131323132122142421)()()(=++++++++++++++2-3解:(2)2112+-+s s t t e e 22--- (4)2)1(13111914191+++-+s s st t t te e e ---+-3191914 (5)2)1(1)1(2)2(2+-+++-s s s t t t te e e ----+-222 (6)s s s s s 5.2124225.04225.022++-+⨯⨯-+⨯- 5.222sin 2cos 5.0+----t e t t2-5解:1)D(s)=0,得到极点:0,0,-2,-5M(s)=0,得到零点:-1,∞+,∞+,∞+ 2) D(s)=0,得到极点:-2,-1,-2 M(s)=0,得到零点:0,0,-1 3) D(s)=0,得到极点:0,231j +-,231j -- M(s)=0,得到零点:-2,∞+,∞+4) D(s)=0,得到极点:-1,-2,∞- M(s)=0,得到零点:∞+ 2-6解:确定2-8解:1)a )建立微分方程dtt dx Bt f t f t x t x k t f t x k t f t f bat f t f t f t f t x m B k k k i k k )()()())()(()()()()()()()()()(202201121==-===--=••b)拉氏变换)()())()(()()()()()()()()()(20220112102s BsX s F s X s X k s F s X k s F s F bas F s F s F s F s X ms k k k i k k =-===--=c)画单元框图(略) d)画系统框图2)a)建立微分方程:dt t dx B t f dt t x t x d B t f t x t x k t f t f t f t f t x m oB o i B i k B B k )()())()(()())()(()()()()()(22110210=-=-=-+=••b)拉氏变换:)()())()(()())()(()()()()()(02211212s sX B s F s X s X s B s F s X s X k s F s F s F s F s X ms B o i B o i k B B k o =-=-=-+=c)绘制单元方框图(略) 4)绘制系统框图2-11解:a)1212321232141H G G H G G H G G G G G -+++(要有具体变换过程)b)))((1)(214321214321H G G G G H G G G G G G -++++ (要有具体变换过程)2-14解:(1)321232132132101111)()(K K K s Ts K K K TsK s K K Ts K s K K s X s X i i ++=+++==φ 321243032132132103402)(111)(1)()()(K K K s Ts s K K s G K K K TsK s K K Ts K s K K s G Ts K K s N s X s n ++-=+++++-==φ(2)由于扰动产生的输出为:)()()()()(321243032102s N K K K s Ts sK K s G K K K s N s s X n ++-==φ 要消除扰动对输出的影响,必须使0)(02=s X 得到:0)(430321=-s K K s G K K K 得到:2140)(K K sK s G =3-1解:1)法一:一阶惯性环节的调整时间为4T ,输出达稳态值的98%,故: 4T =1min ,得到:T =15s法二:求出一阶惯性环节的单位阶跃时间响应,代入,求出。
控制工程基础_课后答案
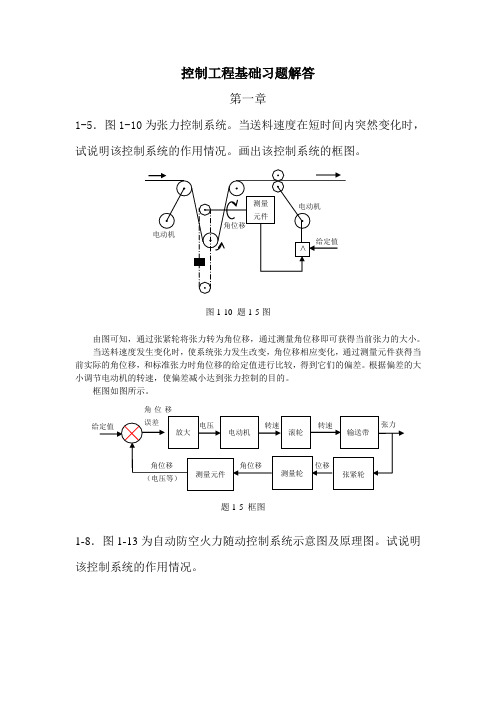
控制工程基础习题解答第一章1-5.图1-10为张力控制系统。
当送料速度在短时间内突然变化时,试说明该控制系统的作用情况。
画出该控制系统的框图。
由图可知,通过张紧轮将张力转为角位移,通过测量角位移即可获得当前张力的大小。
当送料速度发生变化时,使系统张力发生改变,角位移相应变化,通过测量元件获得当前实际的角位移,和标准张力时角位移的给定值进行比较,得到它们的偏差。
根据偏差的大小调节电动机的转速,使偏差减小达到张力控制的目的。
框图如图所示。
1-8.图1-13为自动防空火力随动控制系统示意图及原理图。
试说明该控制系统的作用情况。
题1-5 框图电动机给定值角位移误差张力-转速位移张紧轮滚轮输送带转速测量轮测量元件角位移角位移(电压等)放大电压测量 元件>电动机角位移给定值电动机图1-10 题1-5图该系统由两个自动控制系统串联而成:跟踪控制系统和瞄准控制系统,由跟踪控制系统获得目标的方位角和仰角,经过计算机进行弹道计算后给出火炮瞄准命令作为瞄准系统的给定值,瞄准系统控制火炮的水平旋转和垂直旋转实现瞄准。
跟踪控制系统根据敏感元件的输出获得对目标的跟踪误差,由此调整视线方向,保持敏感元件的最大输出,使视线始终对准目标,实现自动跟踪的功能。
瞄准系统分别由仰角伺服控制系统和方向角伺服控制系统并联组成,根据计算机给出的火炮瞄准命令,和仰角测量装置或水平方向角测量装置获得的火炮实际方位角比较,获得瞄准误差,通过定位伺服机构调整火炮瞄准的角度,实现火炮自动瞄准的功能。
控制工程基础习题解答第二章2-2.试求下列函数的拉氏变换,假定当t<0时,f(t)=0。
(3). ()t et f t10cos 5.0-=解:()[][]()1005.05.010cos 25.0+++==-s s t e L t f L t(5). ()⎪⎭⎫⎝⎛+=35sin πt t f 图1-13 题1-8图敏感 元件定位伺服机构 (方位和仰角)计算机指挥仪目标 方向跟踪环路跟踪 误差瞄准环路火炮方向火炮瞄准命令--视线瞄准 误差伺服机构(控制绕垂直轴转动)伺服机构(控制仰角)视线敏感元件计算机指挥仪解:()[]()252355cos 235sin 2135sin 2++=⎥⎦⎤⎢⎣⎡+=⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛+=s s t t L t L t f L π2-6.试求下列函数的拉氏反变换。
《控制工程基础》课程作业习题(含解答)
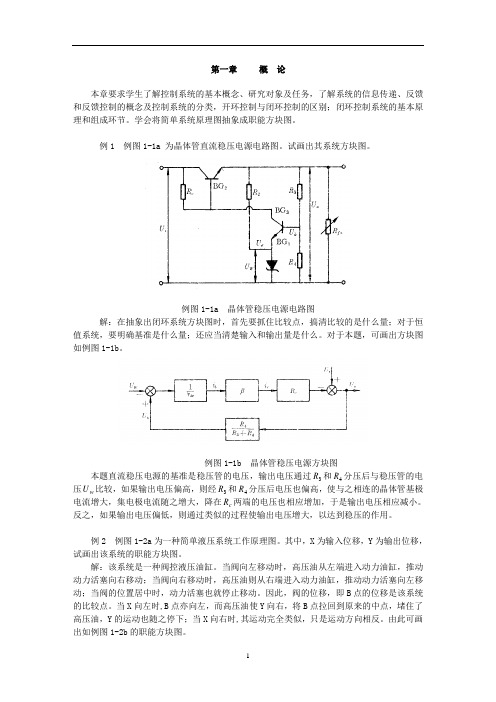
第一章概论本章要求学生了解控制系统的基本概念、研究对象及任务,了解系统的信息传递、反馈和反馈控制的概念及控制系统的分类,开环控制与闭环控制的区别;闭环控制系统的基本原理和组成环节。
学会将简单系统原理图抽象成职能方块图。
例1 例图1-1a 为晶体管直流稳压电源电路图。
试画出其系统方块图。
例图1-1a 晶体管稳压电源电路图解:在抽象出闭环系统方块图时,首先要抓住比较点,搞清比较的是什么量;对于恒值系统,要明确基准是什么量;还应当清楚输入和输出量是什么。
对于本题,可画出方块图如例图1-1b。
例图1-1b 晶体管稳压电源方块图本题直流稳压电源的基准是稳压管的电压,输出电压通过R和4R分压后与稳压管的电3压U比较,如果输出电压偏高,则经3R和4R分压后电压也偏高,使与之相连的晶体管基极w电流增大,集电极电流随之增大,降在R两端的电压也相应增加,于是输出电压相应减小。
c反之,如果输出电压偏低,则通过类似的过程使输出电压增大,以达到稳压的作用。
例2 例图1-2a为一种简单液压系统工作原理图。
其中,X为输入位移,Y为输出位移,试画出该系统的职能方块图。
解:该系统是一种阀控液压油缸。
当阀向左移动时,高压油从左端进入动力油缸,推动动力活塞向右移动;当阀向右移动时,高压油则从右端进入动力油缸,推动动力活塞向左移动;当阀的位置居中时,动力活塞也就停止移动。
因此,阀的位移,即B点的位移是该系统的比较点。
当X向左时,B点亦向左,而高压油使Y向右,将B点拉回到原来的中点,堵住了高压油,Y的运动也随之停下;当X向右时,其运动完全类似,只是运动方向相反。
由此可画出如例图1-2b的职能方块图。
例图1-2a 简单液压系统例图1-2b 职能方块图1.在给出的几种答案里,选择出正确的答案。
(1)以同等精度元件组成的开环系统和闭环系统,其精度比较为_______ (A )开环高; (B )闭环高; (C )相差不多; (D )一样高。
(2)系统的输出信号对控制作用的影响 (A )开环有; (B )闭环有; (C )都没有; (D )都有。
控制工程基础课后习题解答ppt格式
解: 1. 令N(s) = 0,则系统框图简化为: Xi(s)
_
K1
K2 s
K3 Ts 1
Xo(s)
X 所以: o ( s) X i ( s)
K1K 2 K 3 Ts 2 s K1K 2 K 3
K4 N(s) G0(s)
令Xi(s) = 0,则系统框图简化 为:
_
_
K1K 2 s
Xo(s)
X o ( s) G1G2G3 G4 X i ( s) 1 G2G3 H 2 G2 H1 G1G2 H1
b)
G4
Xi(s)
G1 H1
G2
G3 H2
Xo(s)
G4
Xi(s)
G1 H1G2
G2
G3
Xo(s)
H2/G1
Xi(s)
G1 1 G1G2 H1
G2G3+G4
Xo(s)
H1/G3
G4
Xi(s)
G1
G2G3 1 G2G3 H 2 G2 H1
Xo(s)
H1/G3 G4 Байду номын сангаасi(s)
G1G2G3 1 G2G3 H 2 G2 H1 G1G2 H1
Xo(s)
G4 Xi(s)
G1G2G3 G4 1 G2G3 H 2 G2 H1 G1G2 H1
xi 输入
K
B1 m
B2
xo 输出
Xi(s)
K+B1s
1 ms 2
Xo(s)
B2s
2-11方框图简化法则求图示系统的闭环传递函数。
解:a) Xi(s)
H2
G1
G2
控制工程基础董景新第四版课后
习题解析控制工程基础董景新第四版课后习题解析第一章1.1 选择题1. A. 正确答案是A,因为XXXXXXX。
2. B. 正确答案是B,因为XXXXXXX。
3. C. 正确答案是C,因为XXXXXXX。
1.2 简答题1.简要叙述什么是控制工程?控制工程是通过设计和实现控制系统,对被控对象的某些行为或输出进行调整、约束和稳定。
控制工程主要涉及传感器、执行机构、控制算法和控制器等组成的实际系统。
2.什么是开环控制系统和闭环控制系统?开环控制系统是指无反馈信息的控制系统,控制器根据预先设定的输入信号直接控制执行机构。
闭环控制系统是指带有反馈信息的控制系统,控制器根据测量到的系统输出和预设输入之间的差异进行控制。
第二章2.1 计算题1.计算机器人运动过程中的速度和加速度。
已知机器人的运动方程为XXXXXXX,根据给定的参数计算速度和加速度为XXXXXXX。
2.计算PID控制器的参数。
已知系统的开环传递函数为XXXXXXX,根据给定的性能要求计算PID控制器的参数为XXXXXXX。
2.2 简答题1.简述机器人的运动学和动力学。
机器人的运动学研究机器人的运动和变形,通过分析机器人的几何结构和运动规律,研究机器人的位置、速度和加速度等。
机器人的动力学研究机器人的力学性能,通过分析机器人的力、力矩和质量等,研究机器人的力学特性和动态响应。
2.什么是反馈控制系统的稳定性。
反馈控制系统的稳定性是指系统在外部干扰或系统参数变动的情况下,系统的输出能够保持在稳定状态,不会出现振荡或不稳定的现象。
稳定性可以通过分析系统的极点位置、频率响应和幅频特性来评估。
第三章3.1 计算题1.根据给定的传递函数和输入信号,计算系统的输出响应。
已知系统的传递函数为XXXXXXX,输入信号为XXXXXXX,根据给定的参数计算系统的输出响应为XXXXXXX。
2.计算反馈控制系统的稳定裕度。
已知系统的开环传递函数为XXXXXXX,根据给定的参数计算反馈控制系统的稳定裕度为XXXXXXX。
控制工程基础课后习题解答
(R1
R2
)C
d dt
uo
(t
)
uo
(t
)
R2C
d dt
ui
(t
)
ui
(t)
xi
xo
K1 K2 B f)
K1(
xi
xo
)
K2
(
xo
x)
B
dx dt
(K1
K2)B
d dt
xo
(t)
K1K 2 xo
(t)
K1B
d dt
xi
(t)
K1K 2 xi
(t)
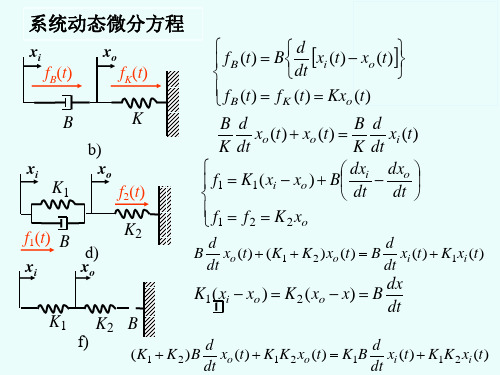
易见:a)与b)、c)与d)、e)与f)为相似系统。
第2章 习题解答
dx2 dt
B2
dx2 dt
K 2 x2
m2
d 2x2 dt 2
第2章 习题解答
m1m2
d 4x2 dt 4
(m1B2
m1B3
m2 B1
m2 B3 )
d 3x2 dt3
(m1K2
m2 K1
B1B2
B1B3
B2 B3 )
d 2x2 dt 2
( K1B2
K1B3
K 2 B1
K 2 B3 )
dx2 dt
故:G2 (s)
X o (s) Xi (s)
(B1s K1)(B2s K2 ) (B2s K2 )(B1s K1) K1B1s
B1 K1 s 1 B2 K2 s 1
B1 K1 s 1 B2 K2 s 1 B1 K2 s
显然:两系统具有相同形式的传递函数。
第2章 习题解答
2-8 按信息传递和转换过程,绘出图示两机械系 统的方框图。
控制工程基础习题解答
1 1 G1G2H
N+
X0
G2
+Y G1
E -1
B H
X 0 (s) N (s)
G2
1 G1G2H
G2 1 G1G 2 H
Y (s) N (s)
X 0 (s)G1H N (s)
1
G1G 2 H G1G2H
B(s) X 0 (s)H G2H
N (s)
N (s)
x0 t
D2 xa
t
x0 t
f a t M 1x0 t D1 x0 t k1x0 t
Fi s Fa s
Fa s k2 X
M 2 s 2 X a s
a s X 0 s
2-15:如题图2-15所示系统,试求 (1)以Xi(s)为输入,分别以X0(s), Y(s), B(s), E(s)为输出的传递函数; (2)以N(s)为输入,分别以X0(s), Y(s), B(s), E(s)为输出的传递函数。
N
+
Xi +
E
Y+
G1
G2
-
B H
第二章习题解
X0
X 0 (s)
1 Cs
s I s
1 I s
Cs
R2 I s
R2
I
s
G s
U0 s Ui s
1 R2Cs
R1 R2 Cs
1
(b)解:
ui t
u0 t
L d it
dt
1 C
控制工程基础课后答案
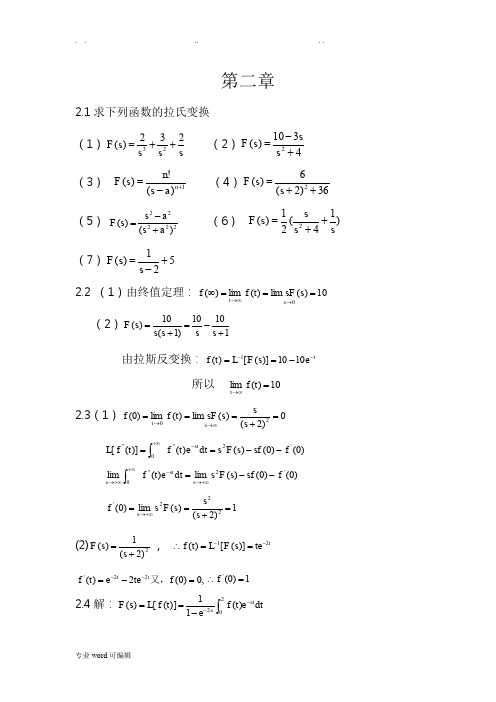
第二章2.1求下列函数的拉氏变换 (1)s s s s F 232)(23++=(2)4310)(2+-=s s s F (3)1)(!)(+-=n a s n s F (4)36)2(6)(2++=s s F(5) 22222)()(a s a s s F +-= (6))14(21)(2s s s s F ++= (7)521)(+-=s s F 2.2 (1)由终值定理:10)(lim )(lim )(0===∞→∞→s t s sF t f f (2)11010)1(10)(+-=+=s s s s s F 由拉斯反变换:t e s F L t f ---==1010)]([)(1 所以 10)(lim =∞→t f t2.3(1)0)2()(lim )(lim )0(2=+===∞→→s ss sF t f f s t )0()0()()()](['2''0''f sf s F s dt e t f t f L st --==-+∞⎰)0()0()(lim )(lim'2''0f sf s F s dt e t f s st s --=+∞→-+∞+∞→⎰1)2()(lim )0(222'=+==+∞→s s s F s f s (2)2)2(1)(+=s s F , t te s F L t f 21)]([)(--==∴ ,0)0(2)(22'=-=--f te et f tt又,1)0('=∴f2.4解:dt e t f e t f L s F st s--⎰-==22)(11)]([)(⎰⎰------+-=2121021111dt e e dt e e sts sts)11(11)11(11222s s s s se s e s e e s s e -------+--=22)1(111s s e s e ---∙-=2.5求下列函数的拉氏反变换(1)t t f 2sin 21)(= (2)t e t t f -=361)((3)t t e e t f 32321)(+-=- (4)t t e e t f 235352)(+=-(5)t e t e t f t t 3sin 313cos 2)(22--+= (6)t t t e e te t f 222)(----+-=2.6(1)0)()()(22=--dtt y d m t ky t f(2)0)()()(222121=-+-dt t y d m t y k k k k t f2.7(1)14312)(23++++=s s s s s G(2)210)(22++=-s s e s G s2.8 解 水的流量Q1由调节控制阀的开度控制,流出量Q2则根据需要可通过负载阀来改变,被调量H 反映了。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控制工程基础第四版董景新课后答案
引言
本文档为《控制工程基础第四版董景新》课后答案的整理。
通过答案的解析和讲解,希望能够帮助读者更好地理解和掌握控制工程基础的相关知识。
第一章系统建模和信号描述
1.问题描述:给定一个系统的输入输出关系,如何进
行系统的建模?答案:在进行系统建模时,需要考虑系统的物理特性和输入输出的关系。
可以使用物理方程、差分
方程或状态方程等数学模型来描述系统的行为。
2.问题描述:信号的分类有哪些?答案:信号可以分
为模拟信号和数字信号,模拟信号是连续变化的信号,而
数字信号是离散的信号。
在控制工程中,常用的信号有连
续时间信号和离散时间信号。
第二章时域分析方法
1.问题描述:什么是系统的阶?答案:系统的阶是指系统能够处理和传输的最高频率。
阶数越高,系统的频率
响应能力越好。
2.问题描述:描述一个系统的输出和输入之间的关系
的标准形式有哪些?答案:描述系统输出和输入之间关系的标准形式有传递函数形式和差分方程形式。
传递函数形
式表示系统输出和输入之间的比值,而差分方程形式表示
系统输出和输入之间的差分关系。
第三章频域分析方法
1.问题描述:什么是频率响应?答案:频率响应是指系统对不同频率的输入信号的响应情况。
频率响应可以通
过系统的传递函数进行描述。
2.问题描述:频率响应包括哪几种常见的形式?答案:频率响应可包括幅频特性曲线和相频特性曲线。
幅频特性
曲线表示系统在不同频率下的输出和输入的幅值比例关系,而相频特性曲线表示系统在不同频率下的输出和输入的相
位差。
第四章控制器的设计
1.问题描述:什么是PID控制器?答案:PID控制器是一种常见的控制器,它由比例、积分和微分三部分组成。
比例部分根据当前误差大小进行调整,积分部分用于消除
系统的静差,微分部分用于改善系统的动态性能。
2.问题描述:PID控制器的参数如何调整?答案:
PID控制器的参数可以通过试探法、经验法或优化方法等
进行调整。
通常的方法是先根据系统的特性选择合适的初
始参数,然后进行试探性调整,并通过实验数据或数学模
型的分析来优化参数。
第五章根轨迹法
1.问题描述:什么是根轨迹?答案:根轨迹是指描述系统极点随参数变化过程中轨迹的图形。
根轨迹图可以用
来分析系统的稳定性、动态性能和调节性能。
2.问题描述:根轨迹的基本性质有哪些?答案:根轨迹的基本性质有:(1)根轨迹始终在一条实轴段上开始
和结束;(2)根轨迹导数取奇数值时,总是与轴线相切;(3)根轨迹的数量等于系统开环极点个数减去系统开环
零点个数。
第六章频域设计法
1.问题描述:什么是频域设计法?答案:频域设计法
是一种通过频率响应对系统进行控制器设计的方法。
它通
过调整控制器的传递函数来满足系统的性能要求。
2.问题描述:频域设计法有哪几种常见的方法?答案:
频域设计法包括Bode图法、极点配置法和根轨迹设计法
等。
Bode图法通过分析系统的幅频特性和相频特性来设计控制器;极点配置法通过调整系统的极点位置来设计控制
器;根轨迹设计法通过分析根轨迹来设计控制器。
结论
本文对《控制工程基础第四版董景新》课后答案进行了整
理和解析。
通过学习和理解这些答案,读者可以更好地掌握控制工程基础的相关知识,并且能够应用于实际的控制工程项目中。
希望本文对读者有所帮助!。