三菱plc控制步进电机编程
PLC实现步进电机的正反转及调整控制
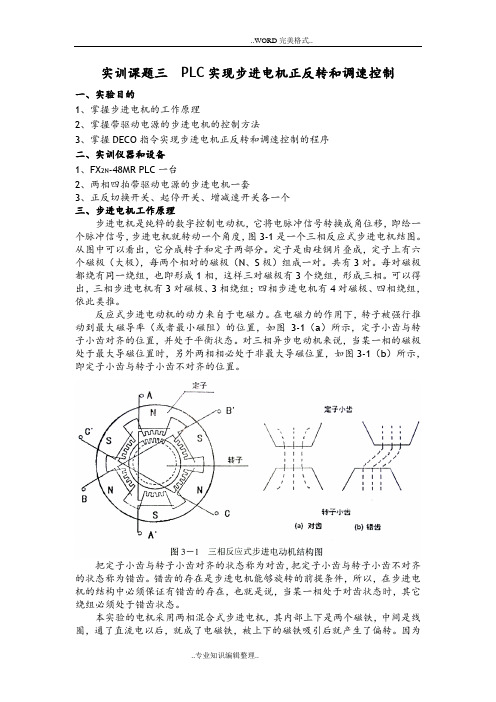
实训课题三PLC实现步进电机正反转和调速控制一、实验目的1、掌握步进电机的工作原理2、掌握带驱动电源的步进电机的控制方法3、掌握DECO指令实现步进电机正反转和调速控制的程序二、实训仪器和设备1、FX2N-48MR PLC一台2、两相四拍带驱动电源的步进电机一套3、正反切换开关、起停开关、增减速开关各一个三、步进电机工作原理步进电机是纯粹的数字控制电动机,它将电脉冲信号转换成角位移,即给一个脉冲信号,步进电机就转动一个角度,图3-1是一个三相反应式步进电机结图。
从图中可以看出,它分成转子和定子两部分。
定子是由硅钢片叠成,定子上有六个磁极(大极),每两个相对的磁极(N、S极)组成一对。
共有3对。
每对磁极都绕有同一绕组,也即形成1相,这样三对磁极有3个绕组,形成三相。
可以得出,三相步进电机有3对磁极、3相绕组;四相步进电机有4对磁极、四相绕组,依此类推。
反应式步进电动机的动力来自于电磁力。
在电磁力的作用下,转子被强行推动到最大磁导率(或者最小磁阻)的位置,如图3-1(a)所示,定子小齿与转子小齿对齐的位置,并处于平衡状态。
对三相异步电动机来说,当某一相的磁极处于最大导磁位置时,另外两相相必处于非最大导磁位置,如图3-1(b)所示,即定子小齿与转子小齿不对齐的位置。
把定子小齿与转子小齿对齐的状态称为对齿,把定子小齿与转子小齿不对齐的状态称为错齿。
错齿的存在是步进电机能够旋转的前提条件,所以,在步进电机的结构中必须保证有错齿的存在,也就是说,当某一相处于对齿状态时,其它绕组必须处于错齿状态。
本实验的电机采用两相混合式步进电机,其内部上下是两个磁铁,中间是线圈,通了直流电以后,就成了电磁铁,被上下的磁铁吸引后就产生了偏转。
因为中间连接的电磁铁的两根线不是直接连接的,是采用在转轴的位置用一根滑动的接触片。
这样如果电磁铁转过了头,原先连接电磁铁的两根线刚好就相反了,所以电磁铁的N极S极就和以前相反了。
但是电机上下的磁铁是不变的,所以又可以继续吸引中间的电磁铁。
PLC的脉冲输出控制步进电机的实用方法
断电复位方可有效。 步进电机的型号是86BYG402,其相电流选4A,拨位
开关1 2 3 4设定值为1111。细分数根据实际应用的精度 要求来选取。
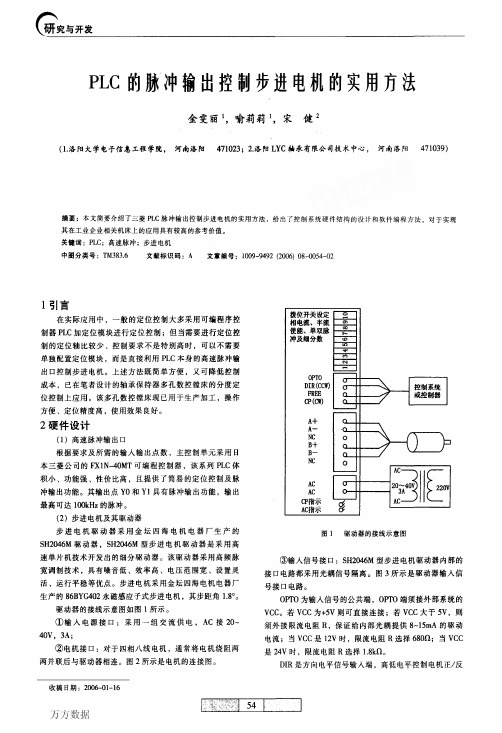
(3)PLC与步进电机驱动器的硬件连接 可编程序控制器PLC与步进电机驱动器的连接如图4
2.期刊论文 胡佳丽.闫宝瑞.张安震.李庆春.何亚东.信春玲 S7-200 PLC在伺服电机位置控制中的应用 -自动化仪
表2009,30(12)
为了探究如何更方便、准确地实现位置控制,确保其位置控制的精度,探讨了基于西门子S7-200系列PLC和Copley系列伺服系统的位置控制方法.通过 介绍系统软硬件构成及其特点,详细论述了PLC系统通过高速脉冲输出、EM253位置控制模块以及自由口通信这三种方式控制伺服电机,以实现绝对运动、 相对运动等;同时对它们进行了一系列的比较.实验证明,三种控制方式各有其不同的应用场合,对类似的工业控制具有一定的借鉴参考意义.
1234 1000 100l 1010 1011 1100 1101 11lO 1111
相电流 2.25A 2.50A 2.75A 3.OOA 3.25A 3.50A 3.75A 4.00A
表2 细分设定【位7 8 9 10)
7 8 9 10 0000 0001 oolO 0011 0100 0101 0110 0111
在图4中将可编程序控制器的脉冲输出端yo的公共端como和输出点y10的公共端com4皆与可编程序控表1相电流设定i位12341234相电流1234相电流0000025a1000225a0001050a100l250a0010075a1010275a00111ooa10113ooa0100125a1100325a0101150a1101350a0110175a11lo375a01112ooa1111400a表2细分设定位7891078910细分数789lo细分数0000110001800012100l20oolo410lo32001151011400100611005001018110l01101011101280111161111256制器的24v地即com相连步进电机驱动器的输入信号公共端与可编程序控制器plc的24v电源相连plc的脉冲输出端yo外接18k的限流电阻连接至步进脉冲输入信号cpplc的输出点y10用于控制步进电机的旋转方wc咖024vsh204硼步进电机驱动器fxlhomtc删0ptp18置yot一c卜一cp18置y10dir图4plc与步进电机驱动器的连接向外接18k的限流电阻连接至方向电平输入端dir
三菱PLC例题(初级)
例题1.电动机顺序起停控制控制要求:(1)1#电动机可以随时起动;(2)只有1#电动机起动后,2#才能起动;只有2#起动完毕之后,3#才能起动;(3)3#电机可以随时停止;(4)只有3#停止后,2#才允许停止;之后2#停止后,1#才允许停止。
例题2.喷泉控制设计控制要求:有A、B、C三组喷头,要求起动后A组先喷5S,之后B、C同时喷,5S后B停止,再过5S,C停止而AB同时喷,再过2S,C也开始喷;A、B、C同时喷5S后全部停止,再过3S重复前面的过程;当按下停止按钮后,马上停止,试编出PLC程序。
例3.三组抢答器设计控制要求:儿童2人、青年1人和教授2人组成三组抢答。
儿童任一人按钮均可抢得,教授需要2人同时按钮才可抢得,在主持人按钮同时宣布开始后10S内有人抢答则幸运彩球转动表示庆贺。
例题4.五组抢答器控制设计控制要求:五个队参加抢答比赛,比赛规则如下。
设有主持人总台及各个参赛队分台。
有总台灯及总台音像,总台开始及总台复位按钮。
分台设有分台台灯、分台抢答器按钮。
各队抢答必须在主持人给出题目,说出“开始”并同时按下总台开始按钮后的10S进行,如提前抢答,抢答器将报出“违例”信号(违例扣分)。
10S时间已到,还无人抢答,抢答器将给出应答时间到的信号,该题作废。
在有人抢答情况下,抢得的队必须在30S内完成答题。
如果30S内没有完成作答,抢答器将按照答题超时处理。
灯光及音像信号所表示的意义是这样安排的:(1)音像+某台台灯:正常抢答;(2)音像+某台台灯+总台灯:违例;(3)音像+总台灯:无人应答或答题超时;(4)在一个题目回答终了后,主持人按下复位按钮,抢答器回复原始状态,为第二轮抢答做好准备。
例5.三电机循环起停运转设计控制要求:控制三台电动机,要求它们相隔5S起动,各运行10S停止;并按照以上要求进行循环。
例6.十字路口交通灯控制(讲解此题目之前,先讲解定时器构成的振荡电路)控制要求:十字路口南北及东西方向均设有红、黄、绿三只信号灯,六只灯按照一定的时序循环往复工作。
PLC控制步进电机正反转实验
第 1 章PLC控制步进电机正反转实验1.1实验目的1、了解PLC的理论与原理;2、掌握PLC编程与操作方法。
3、了解接近传感器的使用方法1.2实验设备1、三菱PLC编程电缆及安装好三菱编程软件的计算机一台;2、模块化柔性制造系统一套。
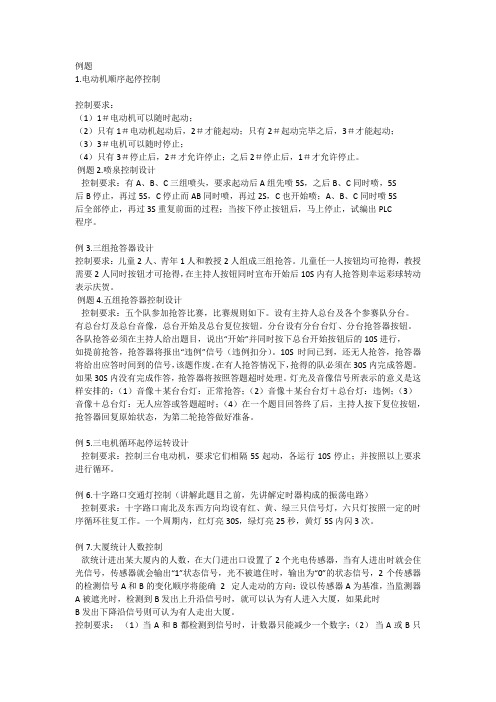
1.3实验原理料库旋转台是依靠步进电机控制的,高精度旋转模块。
依靠PLC 自身含有的脉冲单元,发出驱动脉冲给步进电机驱动器。
驱动器接收到该脉冲以后,根据所发脉冲的频率和数量驱动步进电机向相应的方向旋转。
1、步进电机步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
步进电机作为执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统中。
随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。
现在比较常用的步进电机包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)和单相式步进电机等。
永磁式步进电机永磁式步进电机一般为两相,转矩和体积较小,步进角一般为7.5度或15度;反应式步进电机反应式步进电机一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。
三菱PLC和步进电机实现二维位置控制
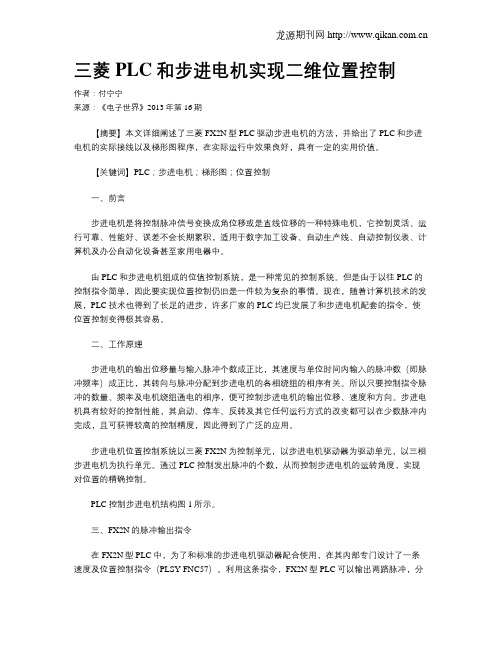
三菱PLC和步进电机实现二维位置控制作者:付宁宁来源:《电子世界》2013年第16期【摘要】本文详细阐述了三菱FX2N型PLC驱动步进电机的方法,并给出了PLC和步进电机的实际接线以及梯形图程序,在实际运行中效果良好,具有一定的实用价值。
【关键词】PLC;步进电机;梯形图;位置控制一、前言步进电机是将控制脉冲信号变换成角位移或是直线位移的一种特殊电机,它控制灵活、运行可靠、性能好、误差不会长期累积,适用于数字加工设备、自动生产线、自动控制仪表、计算机及办公自动化设备甚至家用电器中。
由PLC和步进电机组成的位值控制系统,是一种常见的控制系统。
但是由于以往PLC的控制指令简单,因此要实现位置控制仍旧是一件较为复杂的事情。
现在,随着计算机技术的发展,PLC技术也得到了长足的进步,许多厂家的PLC均已发展了和步进电机配套的指令,使位置控制变得极其容易。
二、工作原理步进电机的输出位移量与输入脉冲个数成正比,其速度与单位时间内输入的脉冲数(即脉冲频率)成正比,其转向与脉冲分配到步进电机的各相绕组的相序有关。
所以只要控制指令脉冲的数量、频率及电机绕组通电的相序,便可控制步进电机的输出位移、速度和方向。
步进电机具有较好的控制性能,其启动、停车、反转及其它任何运行方式的改变都可以在少数脉冲内完成,且可获得较高的控制精度,因此得到了广泛的应用。
步进电机位置控制系统以三菱FX2N为控制单元,以步进电机驱动器为驱动单元,以三相步进电机为执行单元。
通过PLC控制发出脉冲的个数,从而控制步进电机的运转角度,实现对位置的精确控制。
PLC控制步进电机结构图1所示。
三、FX2N的脉冲输出指令在FX2N型PLC中,为了和标准的步进电机驱动器配合使用,在其内部专门设计了一条速度及位置控制指令(PLSY FNC57)。
利用这条指令,FX2N型PLC可以输出两路脉冲,分别控制两台步进电机,很方便地实现二维位置控制。
该指令在应用过程中需要指定以下端口和操作数为位置控制专用,其助记符、功能、操作数、程序部如表1所示。
《三菱FX5U可编程控制器与触摸屏技术》课件—2.4 步进电机转速监控
实际转速显示框的设置
“种类”设置为“数值显示”,数据类型设置为有符号BIN16,字体设为 “12点阵高质量黑体”,尺寸设为4*6,显示格式设为“实数”,整数位3位,小 数位1位。
五、PLC编程指令及样例程序
本任务中PLC发出脉冲信号驱动步进电动机转动,编码器输出脉冲信号送 入PLC监控实际转速。因此,需要进行输出脉冲和高速计数输入采样。
1)输出电流的设定。步进电动机驱动器输出电流的设定以略大于步进电动机的 工作电流为准。42BYGH107 步进电动机的工作电流为0.4A,驱动器输出选择 0.5A档位,使用螺钉旋具将图所示箭头指向0.5档。
2)细分脉冲数的设定。拨码开关来控制,对应细分脉冲数见表,在本任务中设 定为D3 ON、D4 OFF,细分数为3200,如图所示。
设定转速输入框的设置
在软元件属性界面上设置如图2-14,2-15所示,“种类”设置为“数值输入”,数据类型 设置为有符号BIN16,字体设为“12点阵高质量黑体”,尺寸设为4*6,显示格式设为“实数”, 整数位3。小数位1位。在样式中选择图形,是否闪烁,数值颜色设为黄色。
“基本设置” 中的输入范围,根据实际情况设为5~20,低于5时步进电机转矩不足无法转动。
四、组态画面设计
1、新建工程:根据工程新建步进电动机转速监控文件。 2、文本输入:完成步进电机转速监控、正转指示、反转指示、设定频率、实 际频率文本输入。 3、按钮设置:完成正转按钮、反转按钮设置 4、指示灯设置:完成正转指示灯、反转指示灯设置 5、设定转速输入框的设置 6、实际转速显示框的设置 7、工程下载:将触摸屏界面下载到三菱触摸屏中。
三菱PLC使用手册.doc

FX1N-26使用说明书一产品简介PLC采用32位进口芯片,运算速度快,高效稳定,下载程序波特率支持9600,和19200两种波特率。
PLC功能如下:1:16输入10输出晶体管:无机械触点,功率大,寿命长,速度快,本公司采用大功率管,可直接驱动24V直流电磁阀。
继电器:此处就相当于一个小开关,没有极性,可接0--220V交流电,也可接直流电,方便灵活,功率大,但断开吸合没有晶体管快,不可高频率输出,大家可根据自己需求,来选购。
(MT晶体管类型,MR继电器类型)2:支持高速计数。
3:支持高速脉冲输出(可用于步进伺服电机控制)。
4:自带实时时钟(对于时钟设置详见案例)。
5:支持两路AD转换,而且PLC另有2路AD和1路DA的扩展接口,方便今后扩展用。
6:编程方式跟原装日本三菱PLC完全一样,无需任何转换软件即可完全使用三菱GX Developer8.XX、GX Works2等中英文版编程软件。
7:双通信接口,三菱PLC原装422通信接口,485通信接口。
8:掉电记忆,还有超强加密(保护工程人员的劳动成果)。
9:PLC的扩展功能在开发中,敬请关注。
二:性能介绍指令运用和三菱PLC相同,这里主要讲解AD 高速脉冲指令,高速计数器,MODBUS通信。
2.1 、AD模拟量:本PLC模拟量使用很简单:AD0的转换结果直接保存在D5001AD1的转换结果直接保存在D5002无需编程即可轻松获取模拟量。
AD接口使用注意事项:默认发0--10V模拟量输入型,订购时一定要详细说明,可定制0--20MA 4--20MA类型。
对于不同的输入类型可通过配置D8027来实现。
D8027的设置如下:2.2PLC带有高速脉冲输出功能PLSY指令:脉冲输出功能,用来驱动步进电机或伺服电机。
指令格式是[PLSY K1000 K5000 Y0]这里K1000表示脉冲频率是1000Hz。
K5000表示输出5000个脉冲。
Y0表示脉冲输出点是Y0。
plc200-步进电机实例
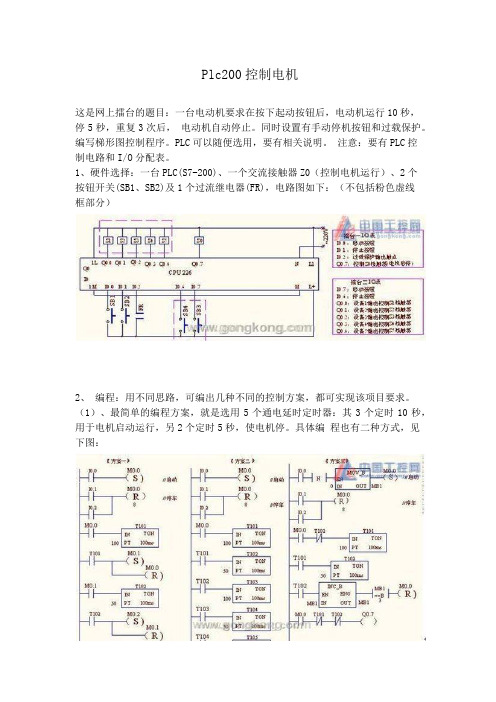
Plc200控制电机这是网上擂台的题目:一台电动机要求在按下起动按钮后,电动机运行10秒,停5秒,重复3次后,电动机自动停止。
同时设置有手动停机按钮和过载保护。
编写梯形图控制程序。
PLC可以随便选用,要有相关说明。
注意:要有PLC控制电路和I/O分配表。
1、硬件选择:一台PLC(S7-200)、一个交流接触器Z0(控制电机运行)、2个按钮开关(SB1、SB2)及1个过流继电器(FR),电路图如下:(不包括粉色虚线框部分)2、编程:用不同思路,可编出几种不同的控制方案,都可实现该项目要求。
(1)、最简单的编程方案,就是选用5个通电延时定时器:其3个定时10秒,用于电机启动运行,另2个定时5秒,使电机停。
具体编程也有二种方式,见下图:上图中的方案一与方案二,同用5个定时器,完成同样的功能。
方案一是这样编程:按下启动按钮(I0.0),使断开。
在此过程中,M0.0、MO.2、M0.4都是10秒的导通时间,用它们去控制Q0.7,其彼此间隔时间为5秒(即M0.1、M0.3的通导时间)。
?8?1延时?8?1M0.0=1,T101得电开始延时,延时10秒,T101吸合使M0.1=1、M0.0=0,使T101断电,而T102得电开始延时,5秒后T102得电吸合,使M0.2=1,M0.1=0。
直到T105得电方案二是这样编程:按下启动按钮(I0.0),使 M0.0=1,T101得电开始延时,延时10秒,T101吸合,使T102得电开始延时,延时5秒,T102吸合,使T103得电开始延时。
直至T105得电延时,延时10秒后动作,使M0.0=0,M0.0=0使T101—T105皆断开,程序结束。
用M0.0的常开触点与T101的常闭触点串联,用T102的常开触点与T103的常闭触点串联,用T104的常开触点与T105的常闭触点串联,三者再并联后去驱动Q0.7,可达到同样的控制作用,由上图可见,由于编程方法不同,其方案二用的指令比方案一少,显然:方案二优于方案一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三菱pic控制步进电机编程
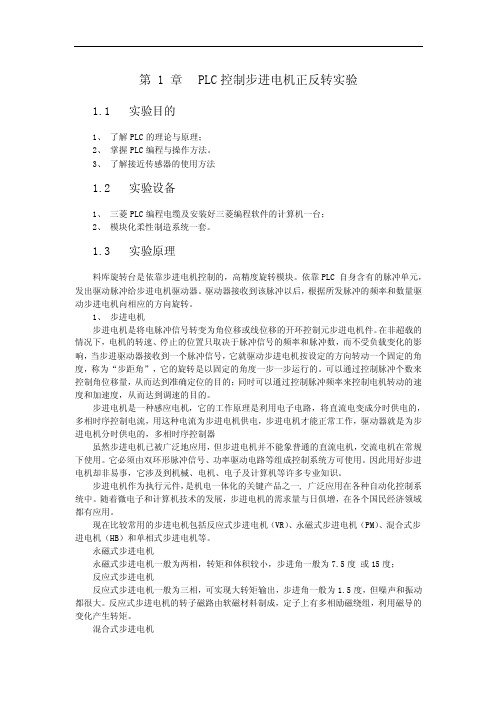
控制要求.PLC发出脉冲信号Y0和方向信号Y10,假设步进电机转一周需要pic发出1000个脉冲,且要求在1S左右转动一周,现在要求步进电机正转5周,停5s,再反转5周,停5s,如此循环。
0 1 LD
M10
PLSR
MIO
1000
=正转启动
K1000 K5000 K500
10 OUT ¥010
YCHO =旋转方向
11 LDD= D8140 K5000
20 OUT TO K50
TO =正转结束延时
23 RST MIO
MIO二正转启动
24 LD T0
TO =正转结束延时
25 SET MU
Frtll=反转启动
26 DHOV K0 B8140
35 LD Mil
MU二反转启动
3& PLSR K1000 K5000 K500 TO00 45 LDD= D8140 K5000
54 OUT T1 K50
ri =反转结束延时
5T ESI MU
Mil=反转启动
58 LD T0
TO =正转结束延时
59 SET M10
H10二正转启动
60 DHOV K0 D8140
69 EHD
1 / 4
3 / 4
三菱PLC 指令PLSR K400 DO K3500 Y0这里K400、DO 、K3500各是指 什么
匀加减速指令,在指令中可以设置脉冲的最大频率、脉冲总数、加减速时间和脉冲输出点。
通过设置加 减速时间来实现匀加速。
如果脉冲加方向的脉冲模式也需要另外控制方向点。
针对指左的最高频率, 进行宦加速,在达到所指定的输出脉冲数后,进行定减速
k400为最髙频率,DO 中内容为总输岀的脉冲数,K3500加减速时间单位为ms,yO 为输岀点 如 DDRVI K999999 K200 YO Y3
那么DDRVI 是相对左位K999999是无限就是一直转 K200是速度 Y0是脉冲输出地址 Y3是方 向 PLC 控制步进电机正反转的程序和梯形图? 一种是双脉冲的! 一路正,一路反。
一种是脉冲加方向的! 一个口给脉冲!另外一个接通就正转,不接通就反转。
DO
K0
正反转运 行艇
K1
K2
K3
K4
开始 标志位
{DDRVI K5000
K5000
Y000
马达肪冲 信号
M8O29
—^-4—
执庶毕 拆恵位
ro
正转完毕 •廷Bt 待反转
M8029 如隹毕
T1
仗转 — ,廷时待正转
DO ] 正反转运 行般
Y002 } 马达方向 信号
DO ] 正反转运 行涼程
K5 <T0 〉
正转究毕 ,延时待反長
K3 DO
正反转运 行流程 Y000 Y002 R 达怫中 马达方向 信号
信号 K4
DO
正反转运 行渝程
DO
}
正反转运 行流程 {END }
{DDRVI K5000
K5
反转宪毕 ,延时待正饕
欧姆龙EE-SX670A传感器。