汇川伺服驱动器说明书
汇川伺服驱动器调试指导.ppt
2)电机参数自学习 设置电机参数 F1-00=2 永磁同步伺服电机 F1-01=? 电机额定功率 F1-02=? 电机额定电压 F1-03=? 电机额定电流(额定电流一般为额定功率的两倍左右,如 电机未标额定电流请按此原则设置) F1-04=? 电机额定频率(电机如未标额定频率请按以下公式计算)
三、调试步骤
7)卸压(A3-08)、底压(A3-09)和底流(A3-10)设定(需要时 设定,通常采用默认值) A3-08:卸压时的最大反向速度,对应最大转速(A3-01)的百分比设 定。用于设定电机的最大反向运行速度。设定值越大,卸压越快, 但太大会造成油泵反转噪声,设定值越小,卸压越慢。 由于油泵存在内泄漏,在系统待机状态没有给流量和压力指令时, 油路中液压油会倒流回油箱,导致空气进入油路,造成系统运行噪 音以及不稳定。所以需要给定一定的底流(A3-09)对应最大转速 (A3-01)的百分比设定,和底压(A3-10)对应系统油压(A3伴一道,共创美好未来
三、调试步骤
3)试运行,电机方向确认 如电机未联接油泵且可以直接看到马达旋转方向时 设置F0-08预置频率10Hz,按RUN运行,观察电机旋转方向是否正确, 按STOP停止 如电机已联接油泵且不可以直接看到马达旋转方向时 关闭安全阀和溢流阀,限制电机最大转矩F2-10=50,设置F008=5Hz,按RUN运行,查看油压表,看油压是否上升,若上升则方 向正确,若不会上升请逐步加大F0-08预置频率,若频率加大到30-40Hz油压依然不上升时说明电机方向错误,请断电任意对调电机 UVW两相,并重新进行电机调谐 最好不要通过修改F0-09参数来改变电机运行方向,确保F0-09为默 认值0
伺服驱动器控制信号接线及功能说明(二)

伺服驱动器控制信号接线及功能说明(二)
二、位置控制方式的脉冲指令信号输入
以汇川公司生产的IS620P型系列伺服驱动器为例说明
①位置脉冲指令输入信号
驱动的脉冲指令输入方式可能有三种:
(1)差分驱动输入方式;脉冲输入最大频率500KHZ
(2)集电极开来输入方式;脉冲输入量最大频率200KHZ (3)高速差分驱动输入方式;脉冲输入量最大频率4MHZ
驱动器的脉冲指令输入形式也有三种:
(1)方向+脉冲
(2)A,B相正交脉冲
(3)CW/CCW正传/反转脉冲
②上位机(PLC)以差分驱动方式输出脉冲指令的接线方式
上位机(PLC)两差分输出直接与驱动器的PULS+,PULS-和
SIGN+,SIGN-相连接,通过200Ω的电阻,光耦接口电路输入给伺服驱动器。
上位机和两底线相连。
③上位机(PLC)以集电极开路方式输出脉冲指令的接线方式
借用伺服驱动器内部+24V电源,通过PULLH1端形成回路。
博创注塑机汇川伺服系统应用技术指导书(技术版)36页PPT

——电机额定转速
——电机额定频率
——电机极对数
注塑机伺服电机一般为八极电机故极对数为4
以额定转速为1500RPM电机为例,代入上述公式可得额定频率为100Hz
F1-05=? 电机额定转速
F1-15=? 电机电机反电势(若电机厂家的参数提供了电机反电势请设置,)
调试步骤
电机调谐 3.
(非油压控制:A3-00=0 面板控制:F0-02=0)
顾保压压力稳定问题;
常见问题处理对策
问题 8 、 低压保压压力稳定,而高压保压压力波动,并且 报ERR44(速度偏差过大)
处理 1、检查FF-01机型是否正确; 2、检查保压电流是否达到转矩上限F2-10,若达到,要适当增
大转矩上限; 3、适当加强低速速度环增益,增大F2-00Kp,减小F2-01Ki; 4、保压时查看U1-03转速,适当打开溢流阀,让其保压转速达到
比例增益Kp越小(A3-05、11、14、17)、积分时间Ki (A3-06、12、15、18)越大,响应越慢,响应太慢容易引 起效率下降和制品不稳定;好处是减小液压冲击。
通常射胶时需要把PID稍微调强点,来满足响应时间,若有 超调请适当增大微分时间Kd(A3-07、13、16、19),其他动 作一般不用加微分时间,默认为0.
3.动力线在安装时一定要用接线端子(线 耳),某些情况下可能还要穿磁环.
4.压力传感器和流量.压力信号不能接反, 否则在调试时压力不受控.
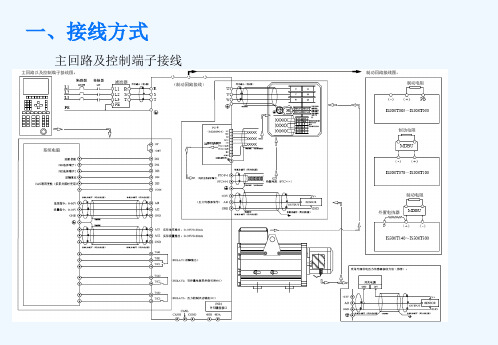
汇川伺服驱动器电气接线图
三相驱动器主回路端子说明: 端子标记名称说明R、S、T三相电源输入
端子_ 交流三相380V电源连接点 (+)、(-)直流母线正、负端子--直流母线正、
由于油泵存在内泄漏,在系统没有给出流量和压力指令时, 油路中液压油会倒流回油箱,导致空气进入油路,造成系 统运行噪音以及不稳定。所以需要给定一定的底流 ((A3-09),对应最大转速(A3-01)的百分比设定) 和底压(A3-10).
汇川伺服驱动器调试指导

Innovation+ Advance
三、调试步骤
注塑机伺服电机一般为八极电机故极对数为4 注塑机伺服电机一般为八极电机故极对数为4 以额定转速为1500RPM电机为例, 1500RPM电机为例 以额定转速为1500RPM电机为例,代入上述公式可得额定频 率为100Hz 率为100Hz F1F1-05=? 电机额定转速 F1电机电机反电势( F1-15=? 电机电机反电势(若电机厂家的参数提供了电机反电势请 设置) 设置) 电机调谐(面板控制:F0电机调谐(面板控制:F0-02=0) 静态调谐 当已知电机反电势情况下,且电机已经联接油泵, (当已知电机反电势情况下,且电机已经联接油泵,不能打开安全 阀或者溢流阀使油泵抽出来的油直接回流油箱的情况下使用) 阀或者溢流阀使油泵抽出来的油直接回流油箱的情况下使用) 设置F1-16=1按ENTER确认后按RUN键开始调谐 设置F1-16=1按ENTER确认后按RUN键开始调谐 F1 确认后按RUN 调谐完成后请查看A1 02编码器角度数值并记录 然后再次进行调谐, A1- 编码器角度数值并记录, 调谐完成后请查看A1-02编码器角度数值并记录,然后再次进行调谐, 完成后再次查看A1 02,确保前后两次数据差别在5 以内, A1完成后再次查看A1-02,确保前后两次数据差别在5°以内,否则说 明编码器异常,请检查编码器。 明编码器异常,请检查编码器。
Innovation+ Advance
三、调试步骤
6)系统响应(PID油压控制)调整 系统响应(PID油压控制) 油压控制 系统提供四组PID 根据输入端子DI2 DI3的组合选择 对应如下: PID, DI2和 的组合选择, 系统提供四组PID,根据输入端子DI2和DI3的组合选择,对应如下:
汇川伺服指令说明

H3U机械手指令使用手册修订记录Chang Record:版本Version 日期Date修改内容及理由Change and Reason拟制人Author审核人Reviewedby批准人ApprovedbyV4.0 2015-10-22 机械手指令加入通用版本,使用的寄存器定义全面更改孟国军V4.1 2016-01-12 重新修订指令表头,更新指令说明漏洞。
张云杰V4.2 2016-01-27 添加AXISJOGA和AXISALMRST指令张云杰H3U机械手指令使用手册 (1)1.特殊寄存器说明 (2)2.使用的机械手指令 (3)3.AXISDRV A:绝对定位 (4)4.AXISENAB 伺服使能 (6)5.AXISSTOP伺服停止定位 (7)6.AXISESTOP伺服急停(应用于发生异常时紧急停止伺服) (8)7.AXISJOG 点动 (9)8.AXISZRN回零 (11)9.AXISJOGA 点动 (13)10.AXISALMRST伺服停止定位 (15)11.伺服参数设置 (16)12.后台CANLINK配置生成 (17)●使用注意事项:H3U集成机械手指令,采用CANLink3.0+620P通信实现。
需要单独的H3U后台软件和单板软件。
⏹需要手动设置好伺服驱动器波特率,站号;⏹需要手动设置好伺服的停止相关参数;⏹回零方式需要手工设置伺服驱动器的回零方式,并把对应接近开关接到伺服驱动器;⏹该功能会占用H3U的SM、SD特殊软元件;CANlink配置占用D7200,M7200之后的软元件;⏹SM400控制指令参数的数据格式,ON:指令数据格式是浮点数;OFF:指令数据格式是整数;设置数据格式后,在机械手指令中,位置、速度参数需要按照设定的数据格式给出,轴当前位置、当前速度的显示也是设定的数据格式;SM400默认OFF;⏹如果数据格式设定为浮点数,指令使用前,需要设置机械参数比例系数;如果数据格式是整数,则无需此设置;⏹不建议在SFC中使用机械手指令;⏹当伺服出现报警错误时,相应的指令的错误将置位,指令不再执行。
汇川伺服驱动器参数极限取反设置

汇川伺服驱动器参数极限取反设置1. 什么是汇川伺服驱动器参数极限取反设置?汇川伺服驱动器是一种用于控制电机运动的设备,参数极限取反设置是对汇川伺服驱动器的一种特定配置。
通过设置参数极限取反,可以更好地控制电机的运动范围,提高系统的性能和稳定性。
2. 参数极限取反设置的作用参数极限取反设置主要有以下几个作用:2.1 限制电机运动范围通过设置参数极限取反,可以限制电机的运动范围,防止电机在运动过程中超出设定的范围。
这样可以保护电机和相关设备,避免因为超出范围而导致的损坏。
2.2 提高系统的稳定性参数极限取反设置可以调整电机的运动曲线,使得电机在运动过程中更加平稳。
通过合理设置参数,可以减少电机的震动和冲击,提高系统的稳定性和精度。
2.3 优化电机的动态响应参数极限取反设置还可以优化电机的动态响应。
通过调整参数,可以使得电机的加速度和减速度更加平滑,响应速度更快,从而提高系统的动态性能。
3. 参数极限取反设置的具体步骤参数极限取反设置的具体步骤如下:3.1 进入参数设置界面首先,需要进入汇川伺服驱动器的参数设置界面。
通常可以通过连接电脑和驱动器,运行相应的配置软件来进入参数设置界面。
3.2 找到参数极限取反设置选项在参数设置界面中,需要找到对应的参数极限取反设置选项。
通常该选项会被分为多个子选项,包括极限位置设置、极限速度设置、极限加速度设置等。
3.3 根据实际需求进行参数调整根据实际需求,对每个参数进行相应的调整。
可以根据设备的要求和运动的特点,设置合适的极限位置、极限速度和极限加速度等参数。
3.4 保存设置并测试在完成参数调整后,需要保存设置并进行测试。
可以通过手动控制或者运行相应的测试程序,验证参数设置的效果。
4. 参数极限取反设置的注意事项在进行参数极限取反设置时,需要注意以下几个事项:4.1 确保参数设置合理参数设置需要根据实际需求进行调整,需要充分考虑设备的要求和运动的特点。
不合理的参数设置可能会导致系统性能下降或者设备损坏。
汇川伺服速度模式控制参数

汇川伺服速度模式控制参数【原创实用版】目录1.汇川伺服驱动器概述2.汇川伺服速度控制模式3.汇川伺服加减速时间参数4.汇川伺服转矩模式原理5.一体化低压伺服 ethercat 通信的电机在汇川 h5uplc 上的使用正文一、汇川伺服驱动器概述汇川伺服驱动器是一种高性能的电机驱动设备,能够精确控制电机的速度、转矩和位置。
它具有优秀的性能、稳定的可靠性和便捷的操控性,广泛应用于各种工业自动化领域。
二、汇川伺服速度控制模式汇川伺服驱动器支持多种速度控制模式,包括速度模式、转矩模式和位置模式。
其中,速度控制模式是最常用的一种控制方式。
通过设置目标速度和加减速时间,可以实现对电机速度的精确控制。
三、汇川伺服加减速时间参数在汇川伺服速度控制模式下,可以通过调整加减速时间参数来改变电机的加速和减速过程。
加减速时间参数是通用的参数,可以灵活调整,以满足不同应用场景的需求。
四、汇川伺服转矩模式原理汇川伺服转矩模式是一种基于电机转矩控制的模式。
通过设置目标转矩和转矩限制,可以实现对电机转矩的精确控制。
在转矩模式下,驱动器会根据目标转矩和实际转矩之间的差值自动调整电机的输出功率,确保电机始终在工作范围内运行。
五、一体化低压伺服 ethercat 通信的电机在汇川 h5uplc 上的使用一体化低压伺服 ethercat 通信的电机在汇川 h5uplc 上的使用内容介绍了一体化低压伺服 ethercat 通信的电机在汇川 h5uplc 上的使用方式和方法。
通过在汇川 h5uplc 上配置相应的参数和程序,可以实现对一体化低压伺服 ethercat 通信的电机的精确控制。
综上所述,汇川伺服驱动器作为一种高性能的电机驱动设备,能够实现对电机速度、转矩和位置的精确控制。
通过调整速度控制模式下的加减速时间参数,可以满足不同应用场景的需求。
汇川技术IS 系列伺服选型手册

深圳市汇川技术股份有限公司Shenzhen lnovance Technology Co., Ltd.地址:深圳市宝安区宝城70区留仙二路鸿威工业区E栋 总机:(0755)2979 9595传真:(0755)2961 9897 客服:400-777-1260 苏州汇川技术有限公司Suzhou lnovance Technology Co., Ltd.地址:苏州市吴中区越溪友翔路16号 总机:(0512)6637 6666 传真:(0512)6285 6720 客服:400-777-1260 IS620系列伺服本公司通过ISO9001TUV Rheinland Group销售服务联络地址V5.1进取 永不止步Forward, Always Progressing变频器 | 伺服系统 | PLC | 机器人 | 轨道交通 | 新能源巴西长春汇通光电技术有限公司杭州汇坤控制技术有限公司欧洲技术中心汇川技术(印度)有限公司服务网络公司总部设在深圳,同时在苏州、香港、杭州等地建立多家子公司 覆盖全国的67个办事处超过400位一线销售及服务人员 240家授权代理商 128家全国联保中心 8个库存中心保证了响应客户需求的及时性。
汇川技术伺服驱动系统平台公司简介深圳市汇川技术股份有限公司(300124)专注于工业自动化驱动与控制产品的研发、生产和销售,定位服务于中高端设备制造商,以拥有自主知识产权的工业自动化控制技术为基础,以快速为客户提供个性化的解决方案为主要经营模式,实现企业价值与客户价值共同成长。
主要产品有低压变频器、高压变频器、一体化及专机、伺服系统、PLC、HMI、永磁同步电机、电动汽车电机控制器、轨道交通牵引系统等;重点布局智能制造、新能源、工业互联网三大领域,产品广泛应用于电梯、起重、机床、金属制品、电线电缆、塑胶、印刷包装、纺织化纤、建材、冶金、煤矿、市政、汽车、轨道交通等行业。
公司在低压变频器市场的占有率在国产品牌厂商中排名第一,其中一体化及专机产品在多个细分行业处于业内首创或领先地位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汇川伺服驱动器说明书
汇川伺服驱动器说明书
1. 简介
汇川伺服驱动器是一种高精度、高性能的驱动器,广泛应用于机械设备控制系统中。
本说明书详细介绍了汇川伺服驱动器的特点、性能参数、安装与调试方法以及常见问题的排除方法。
2. 特点
- 高精度:汇川伺服驱动器采用先进的闭环控制算法,确保驱动器输出的电流和位置具有高精度。
- 高性能:汇川伺服驱动器具有快速响应速度和良好的控制性能,适用于各种复杂的控制应用。
- 可靠性:汇川伺服驱动器采用高品质的元器件和先进的制造工艺,具有稳定可靠的性能。
- 易安装:汇川伺服驱动器采用模块化设计,安装简便,可方便与多种设备进行连接。
3. 性能参数
3.1 电气参数
- 额定输入电压:220V
- 额定输出电流:10A
- 额定功率:2.2KW
- 控制方式:位置控制、速度控制
3.2 机械参数
- 尺寸:120mm x 75mm x 160mm
- 重量:1.5kg
4. 安装与调试
4.1 安装
1. 将汇川伺服驱动器固定在设备的安装板上,使用螺丝固定。
2. 将电源和信号线连接到对应的接口上。
3. 连接伺服电机与驱动器的电源线和控制线。
4.2 调试
1. 打开电源,确保电源电压稳定。
2. 进入驱动器的参数设置界面,设置相应的参数,如工作模式、运动参数等。
3. 进行伺服电机的零点设定和限位设定。
4. 进行位置或速度控制测试,调整参数使控制效果达到预期。
5. 常见问题排除
5.1 驱动器无法启动
- 检查电源线是否连接正确。
- 检查输入电压是否正常。
- 检查驱动器的电机连接是否正确。
5.2 驱动器报警
- 检查报警代码,查找对应的故障原因。
- 根据故障原因采取相应的排除措施。
6. 结论
本文档详细介绍了汇川伺服驱动器的特点、性能参数、安装与调试方法以及常见问题的排除方法。
通过阅读本文档,用户可以更好地了解汇川伺服驱动器的使用方法,并能够在实际应用中解决常见问题。
如果用户在使用过程中遇到其他问题,建议参考汇川伺服驱动器的官方技术支持文档或联系售后服务人员寻求帮助。